
Using Abstraction Graphs to Promote Exploration in Curiosity-Inspired
Intrinsic Motivation
Mahtab Mohtasham Khani
a
, Kathryn Kasmarik
b
, Shadi Abpeikar
c
and Michael Barlow
d
UNSW Canberra, University of New South Wales, Canberra, Australia
Keywords:
Intrinsically Motivated Reinforcement Learning, Graph Representation, Computer Game, Curiosity Models.
Abstract:
This paper proposes a new approach to modelling IM using abstraction graphs to create a novel curiosity
model. An abstraction graph can model the topology of a physical environment in a manner that is not captured
by typical curiosity models that use self-organising or adaptive resonance theory networks. We hypothesise
that this can permit more systematic exploration and skill development in a motivated reinforcement learning
setting. To evaluate the proposed model, we have compared our agent’s behaviour with an existing curiosity
model in the same environment and the same configuration. For this evaluation, we examined each agent’s
behaviour at different life stages and characterised the exploration and attention focus of each agent in each
life stage. We concluded the best uses of each approach.
1 INTRODUCTION
Reinforcement learning (RL), permits an agent to
learn skills through a trial-and-error procedure (Sut-
ton and Barto, 1998). Intrinsically Motivated RL
(IMRL) is an approach to the progressive acquisition
of behavioural competence for RL agents (Peng et al.,
2019). In recent years, there has been a growing ac-
knowledgment that RL agents operating in complex
environments should possess the capability to drive
their own learning. This is due to the recognition
that it is often impractical for system designers to pre-
define a generic reward signal in advance (Clements
et al., 2019). In various applications, agents en-
counter problems within their environment that may
not be fully known or easily solvable during the ini-
tial training phase. On the other hand, if the agent
acquires knowledge about the environment or its own
capabilities, it can become capable of facing these
new problems in the future without the need for pre-
programming (Din and Caleo, 2000).
Curiosity models have provided an approach to
dynamic reward signals suitable for adapting the at-
tention focus of IMRL agents over the course of their
life. However such models can result in repetitive be-
a
https://orcid.org/0000-0003-4811-072X
b
https://orcid.org/0000-0001-7187-0474
c
https://orcid.org/0000-0002-8404-0290
d
https://orcid.org/0000-0002-7344-4302
haviour when curiosity is not offset by adequate struc-
tural memory of the agent’s environment. The uti-
lization of graph theory, on the other hand, provides
a powerful tool for abstracting complex learning en-
vironments. Notably, RL with extrinsic and intrin-
sic goals are some instances of these complex learn-
ing environments, that have benefited from the advan-
tages of graph representation theory in recent years
(Huang et al., 2019).
Early work used a range of reward functions simu-
lating concepts such as curiosity and novelty-seeking
behaviour in IMRL (Merrick and Maher, 2009). The
three contributions of this paper are: First, a method
for constructing a graph-based representation of agent
experiences online during lifelong learning. Second,
two IM models make use of this graph representation
to calculate rewards online. And third, metrics for
analysing lifelong learning in terms of the life stages
of an agent.
2 LITERATURE REVIEW
This section brings together literature from four
fields. Curiosity models, intrinsically motivated RL,
data structure motivation methods, and graph-theory
in RL, to clarify the research niche for this paper.
Mohtasham Khani, M., Kasmarik, K., Abpeikar, S. and Barlow, M.
Using Abstraction Graphs to Promote Exploration in Curiosity-Inspired Intrinsic Motivation.
DOI: 10.5220/0012181400003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 505-513
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
505

Curiosity Inspired Models. Curiosity-inspired
motivation models, with the definition of IM and
curiosity-driven exploration (Marsland et al., 2005),
play a crucial role in driving agents to explore their
environment. These models focus on modelling the
agent’s drive to explore its environment and seek
out new information (Pathak et al., 2017). They are
based on the idea that the agent is driven by a desire
to reduce its uncertainty about its environment and
use metrics such as prediction error or surprise to
quantify this uncertainty (Pathak et al., 2017).
Intrinsically Motivated RL. In recent years, there
has been increasing recognition that RL agents in
complex environments must be able to drive their own
learning since it is not possible for the system de-
signer to specify a reward signal in advance that is ad-
equate for ongoing lifelong learning (Clements et al.,
2019). In much of the research with IM, there is an ex-
ternal main goal available in the environment and an
architecture that helps to define different efficient sub-
goals for learning skills and reaching the main goal
(Aubret et al., 2021). This provides advantages in ap-
plications such as computer games where defining in-
trinsic and extrinsic goals can permit faster solutions
to difficult problems (Bellemare et al., 2016).
Also, if the agent learns about the environment,
the properties inside the environment, how impor-
tant these properties are, how its actions can change
the environment, and its own abilities it may be able
to solve new problems in future without being pre-
programmed for them (Din and Caleo, 2000).
Data Structures Motivation Models. Clustering-
based curiosity models are a class of models that use
clustering algorithms to generate curiosity-driven be-
haviours in agents. By clustering their input data,
curiosity models are able to help an agent identify
new goals (and eventually skills) associated with each
identified cluster(Pathak et al., 2017).
Researchers have developed different unsuper-
vised clustering algorithms, such as k-means clus-
tering (Marsland et al., 2005), self-organizing maps
(SOMs) (Kohonen, 2012), growing neural gas (GNG)
(Fritzke, 1995), grow-when-required (GWR) net-
works (Marsland et al., 2005), adaptive resonance
theory (ART) networks (Grossberg, 1976), and Sim-
plified ART (SART) networks (Baraldi et al., 1998).
Several of these have been used in curiosity models.
The choice of clustering algorithm for a particular ap-
plication depends on the specific requirements of the
task.
Self-organising maps (SOMs) are a popular ap-
proach to building clustering-based curiosity models
as they provide dimensionality reduction (Marsland
et al., 2005) while preserving the topological struc-
ture of the input data. It is a type of unsupervised
neural network that can cluster similar input data into
discrete categories (Skupin et al., 2013). The quanti-
zation error (quant
e
) is a measure to calculate the dis-
tance between each data input and its corresponding
best matching unit (BMU). It measures the degree of
mismatch between the SOM and the input data (Tu,
2019). If the quant
e
is small, the SOM feature map
will be assessed with good quality.
In this work, we have employed SOM-based cu-
riosity in two ways. We utilized it as a baseline for
understanding the performance of frontier-based IM.
Table 1 shows the details of each clustering al-
gorithm discussed above. In this table, we compare
abstraction graphs to show the differences and sim-
ilarities between existing clustering approaches and
motivate the work in this paper.
Graph Theory in RL. Graph theory has been ap-
plied to a range of problems such as search algo-
rithms (Jin et al., 2021). Some approaches try to find
efficient sub-goals for an agent(Jin et al., 2021) by
finding a high-level plan and using low-level policies
to reach the goal or the sub-goal..Graph theory has
also been applied for action space reduction (Eysen-
bach et al., 2019), and understanding the RL theory
(Buabin, 2013). Some works apply graph abstraction
to both intrinsically and extrinsically motivated RL
methods (Jin et al., 2021).However, none of these ap-
proaches uses graph representation with the purpose
of complementing curiosity which is our focus in this
paper.
3 METHODOLOGY
In this paper, we propose three motivation meth-
ods using abstraction graphs and examine their im-
pact on the behaviour of an agent. In Subsection
3.1, we explain how we create our abstraction graph
while the agent interacts with its environment. Next,
we describe our proposed Frontier-based IM method
in Section 3.2. In this Section, we talk about the
other motivation method which is SOM-based curios-
ity in IMRL. Finally, we propose a Hybrid Frontier-
curiosity algorithm in IMRL.
3.1 Abstraction Graphs
In this section, we will describe the proposed state-
transition graph for representing IM behaviours. In
graph theory, we define each graph by G = (V,E)
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
506
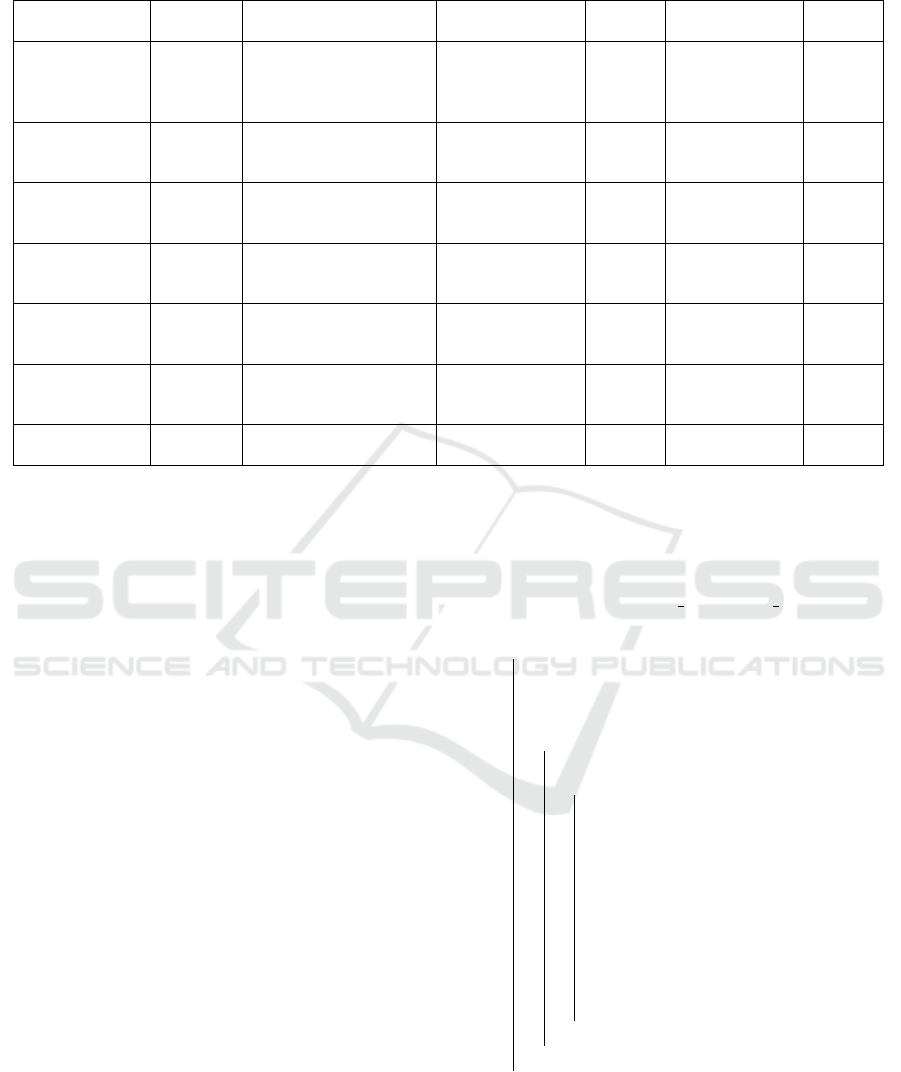
Table 1: Clustering-based Curiosity Models.
Algorithm Prototypes Topology Cluster Initialization Grow Limitations Distance
Metric
SOMs(Kohonen,
2012)
Fixed Topology-preserving (in-
cludes neighbourhood rela-
tions but edges don’t have
meaning)
Randomized, then re-
fined over time
No Not designed for
online learning, can
become saturated
over time
Euclidean
K-Means Clustering
(Marsland et al.,
2005)
Fixed No topology Randomized, then re-
fined over time
No Not topology-
preserving
Euclidean
ART Net-
works(Grossberg,
1976)
Variable No topology Empty at start, popu-
lated over time
Yes Limited to binary
and analog inputs
Hamming
SART Net-
works(Baraldi
et al., 1998)
Variable No topology Empty at start, popu-
lated over time
Yes No neighborhood
relations
Hamming
GNG(Fritzke, 1995) Variable Topology-preserving (in-
cludes neighborhood rela-
tions)
Empty at start, popu-
lated over time
Yes Delay in creating
new cluster proto-
types
Euclidean
GWR Net-
works(Marsland
et al., 2005)
Variable Topology-preserving(includes
dynamically created connec-
tions between nodes)
Empty at start, popu-
lated over time
Yes Can struggle with
high-dimensional
data
Euclidean
Abstraction Graph Variable Topology-preserving (with
edges representing transition)
Populated over time Yes May become large
where G denotes the graph, V represents the vertex
set, and E represents the edge set. In this work, our
graph is represented by G = (S,T), where S repre-
sents different states as different vertexes and T rep-
resents the transition between vertexes. We define
each transition as the movement of the agent from
state S to state S
′
driven by action A. Initially, we
start with an empty graph represented as G = (
/
0,
/
0).
As we progress step by step, we construct our graph
by adding individual states and their corresponding
transitions to it. Equation 1 illustrates the process of
combining states and transitions to form the graph.
Here, S
t−1
represents previous state, S
t
represents new
states, T
t−1
denotes the transitions from the previous
state, and T
t
denotes the new transitions.
G = (S
t−1
∪ S
t
,T
t−1
∪ T
t
) (1)
In this equation, the union symbol (∪) is used to com-
bine sets, representing the addition of new elements
to the existing sets.
Our Graph abstraction employs multigraphs to
capture parallel or overlapping transitions between
states. The flexibility of multigraphs enables us to ex-
tract the exact degrees of connectivity for each node
which plays a crucial role in the IM algorithms for our
agents.
3.2 IMRL Methods
Algorithm 1 shows the core structure shared by all the
methods presented in this paper. Each method stands
out based on how it calculates the reward, depending
on how it is motivated. This difference makes each
method unique.
Data: environment, n episodes, n runs
Result: G, Q-table
for each run do
Instantiate environment and agent;
Instantiate an empty state transition graph
G = (
/
0,
/
0);
for each episode do
while Agent not terminated AND the
step limits are not reached do
Observe the environment in the
step;
Choose the next action based on
an ε − greedy policy;
Update SOM;
Calculate R based on
Equations 3, 5, or 4 accordingly;
Update Q-table using Equation2;
Update G using Equation1;
Take the chosen action;
end
end
end
Algorithm 1: Core structure algorithm for all the proposed
methods.
We will describe each method using Algorithm 1
and the different IM methods leading in different re-
Using Abstraction Graphs to Promote Exploration in Curiosity-Inspired Intrinsic Motivation
507

ward functions, in the following.
q[S,A] = q[S,A]+α ∗(R)+λ∗max(q[S
′
,A
′
])−q[S,A])
(2)
Frontier-Based IMRL. Here we propose our
Frontier-based IMRL method using Algorithm 1 and
calculating the reward function through Equation 3.
Ds in this equation represents the degree for the cur-
rent state.
In the Frontier method, the agent can observe the
current state of the environment as a feature vector.
The record of state transitions of the agent will be
saved in another variable called
′
State − Transition
′
.
The degree of each state is determined by counting the
number of edges that pass through any specific node.
In each step of each episode, the agent will ob-
serve the environment and choose the action accord-
ing to the ε − greedy policy. The agent will calculate
the degree of each state if it is more than 0 the intrin-
sic reward of M =
1
Degree
will be sent to the bellman
equation 2 (Sutton and Barto, 1998) for calculating
the updated Q-value. If the agent visits a new node
with no connections, we can’t calculate the reward as
it leads to M =
1
0
which is an error. So, we simply
give it a reward of 1.
R =
1/Ds Ds > 0
1 Ds ≤ 0
(3)
SOM-Based Curiosity in IMRL. As mentioned
previously, we use a SOM-based technique as a base-
line for evaluating our proposed abstraction graph ap-
proach in this paper.
Algorithm 1 will be updated by the SOM IM.
The reward in this method will be calculated through
equation 4. quant
e
s here means the amount of quanti-
sation error in the current state of S. It replaces the re-
ward component with a −quant
e
, calculated based on
the current state obtained from the SOM. The quant
e
is used as an intrinsic reward for the agent which
yields a traversing graph of an agent, dependent on
the SOM. The idea is to analyse and compare the be-
haviour of an RL agent with clustering motivation (by
a negative amount of quant
e
as the reward) with our
other agents like the Frontier, and the Hybrid Frontier
methods.
At each step of this method, the agent chooses the
next action based on an ε-greedy policy, updates the
SOM, and calculates the quant
e
for the current state
representation. As we are looking to minimize the
amount of error, we will send the negative form of
quant
e
as the intrinsic reward to the agent(R). The
Q-table is then updated using the Bellman equation 2
with R as the reward component. Using the quant
e
as the intrinsic reward, the agent is encouraged to ex-
plore areas closer to the centroid of SOM clusters or
far from the clusters’ boundaries.
R = −quant
e
s (4)
Hybrid Frontier-Curiosity in IMRL. In this sec-
tion, we propose a hybrid approach that combines
both frontier and curiosity-based IM. We reduce the
value of the quant
e
of SOM from the Frontier method
and return this value as the reward of our RL agent.
The agent navigates in our proposed grid environment
and in each step, the agent chooses its action by con-
sidering the reward it is calculating from the Frontier
Method and SOM error. The reason behind this is to
observe how the agent behaves when it is motivated
by the combination of two separate motivations. We
are using the same algorithm as shown in Algorithm
1 by sending R as calculated in Equation 5. The same
as previous equations Ds indicates the degree of the
current state, and quant
e
s shows the amount of quan-
tisation error in the current state of S.
R =
1/Ds + quant
e
s Ds > 0
1 Ds ≤ 0
(5)
4 EXPERIMENTS
In this section, we proceed to implement the methods
discussed in Section 3 and analyze their behaviour. To
assess their effectiveness, we devised a dynamic game
environment wherein we tested our IM methods. Us-
ing RL agents with varying motivations, we evalu-
ated their behaviour within this environment, which
we will elaborate on in Section 4.1. Then, we will ex-
plain our metrics and visualization in Section 4.2. Our
game environment will be explained next in Section
4.3. Finally, we will represent our results in Section
4.4.
4.1 Experimental Setup
In this work, all agents were configured uniformly,
running a total of 20 runs, with each iteration com-
prising 500 episodes, and the step limit is 1875. We
have implemented an ε-greedy policy with ε = 0.1
to encourage both exploration and exploitation during
the game. The learning rate for the Belman Equation
2 in this work has been set to α = 0.1, and the dis-
count factor value is 0.9.
To make our visuals clearer, in all the results in
this paper, we’ve recorded every first episode out of
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
508
every three consecutive episodes. This gives us a to-
tal of around 167 episodes out of the original 500
episodes.
4.2 Metrics and Visualisations
In this section, we will focus on the metrics we have
used to visualize our graphs. Figure 1 highlights the
visualization of our graph representation. The second
part of this Figure zooms in on a particular section
of the graph, showing how one state transforms into
multiple states by having different characteristics. In
Figure 1: Graph representation. The left bar shows the vis-
ited node’s count. The right colour bar shows the visited
edges count.
Figure 1 the size of the nodes shows the ratio of vis-
iting that state. Hence, the state with the greater size
has been visited more. The colour map bar(right bar)
belongs to the edges and represents the ratio of vis-
its to that edge. The edges near to yellow colour are
showing more traffic. The colour map for the nodes
(left bar) shows the ratio of visits to that node. The
darker the blue, the more visits that node has received.
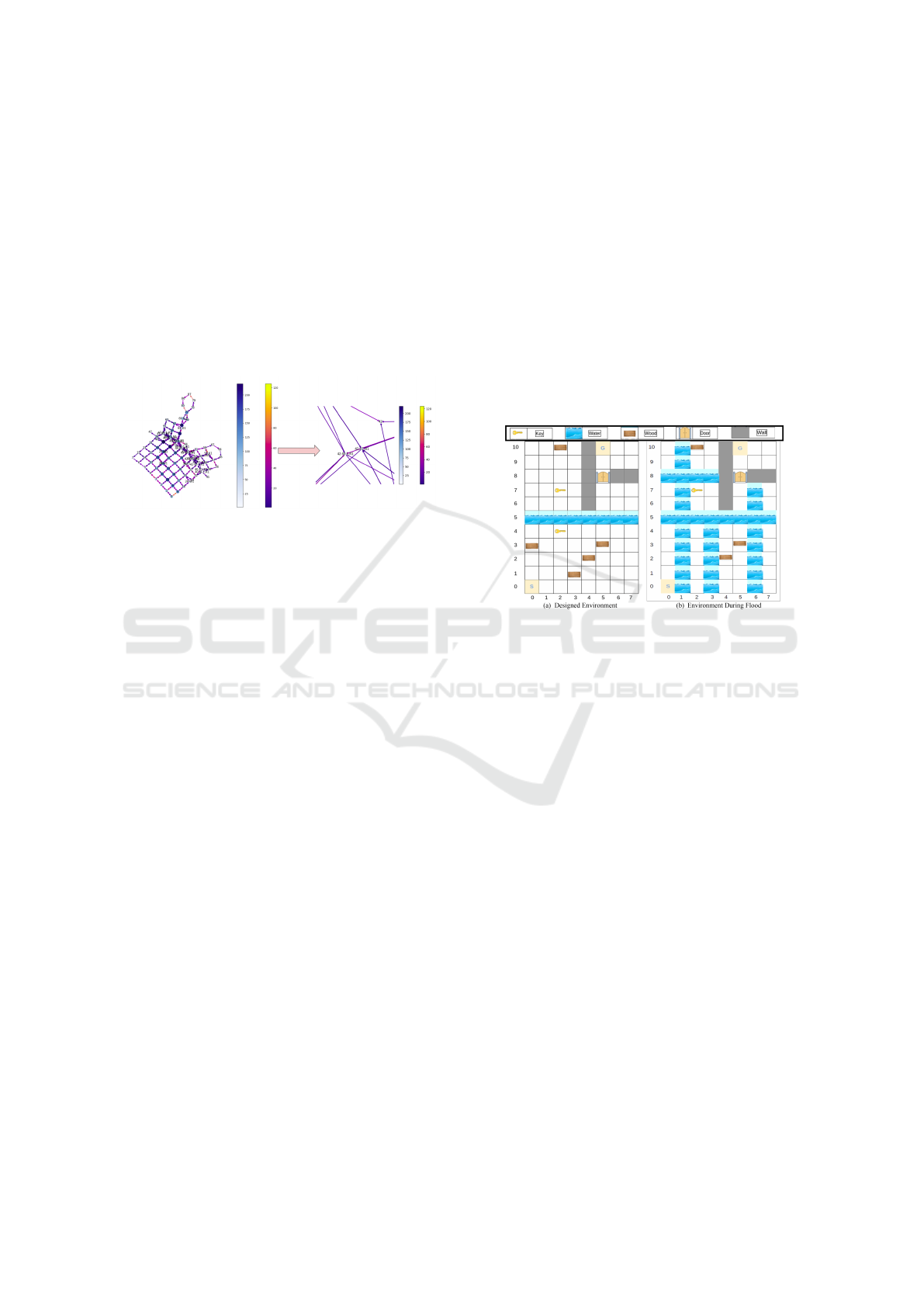
4.3 Computer Game Environment
This paper proposes a controlled and dynamic en-
vironment game environment. it consists of the el-
ements of physical location as presented in Figure
2. The state space is defined by variables denoted
as S = (x, y,key,wood, door,water, gateway). Here,
(x,y) represents the agent’s position within the en-
vironment, while key,wood,door,water, gateway in-
dicates the presence or absence of these items in the
current state.
The action space comprises four directional move-
ments to right, left, up, or down. If the next step
leads to an obstacle or environment border (walls),
the agent will get another chance to select an action
in the same episode to overcome it. In each episode,
the agent begins at state S, changes its current state
based on the selected actions A, receives an intrinsic
reward for (S,A), and transitions to a new state S
′
. We
run the experiment for 500 episodes, repeating it 20
times. An episode terminates when the agent reaches
the gateway state or the step limit. The agent will fail
if it cannot survive the flood or pass the water. The
states with wood signs have a respawn time, and the
wood resources will be replenished after a certain pe-
riod. The agent collects the wood in order to navigate
through the water, otherwise, it will die. To pass the
door, the agent should have at least one key while the
key position is dynamic by time and it will be updated
after the respawn time. If the agent is located in any
of the water states and it is not equipped with wood, it
will die. There is a specific time step, in which the
flood happens. If the agent does not have enough
wood to pass the flood, it will die. Also, the flood
might attack wood states, rendering them unavailable
for pickup for a specific time.
Figure 2: Proposed game environment.
4.4 Results
In this section, we describe the experimental results
used to investigate the behaviour of the agents which
have different motivations presented in Section 3. All
the experiments are developed in our simulated game
environment presented in Section 4.3.
Here we define the agent’s lifelong as the duration
of the episodes inside a run. We aim to analyse the
agent’s performance throughout its lifelong. Hence,
our analyzis is categorized into two main parts. The
first part involved dividing the agent’s life long into
two equal halves and analyzing the frequency of state
visits during these two halves, Section 4.4. In the sec-
ond part, we divided the agent’s life stages into four
equal parts and calculated the key states for each life
stage, Section 4.4. Also, we should mention that in
both categories, the x-axis represents the 88 states in
our grid environment, while the y-axis indicates the
average number of visits to each state over 20 runs.
State Visits over Agent’s Life Stages. In this sec-
tion, we explore how different IM algorithms influ-
ence the behaviour of our agents in lifelong. Hence,
we divide the agent’s life into two equal halves: the
initial and the final. This division lets us analyze the
Using Abstraction Graphs to Promote Exploration in Curiosity-Inspired Intrinsic Motivation
509
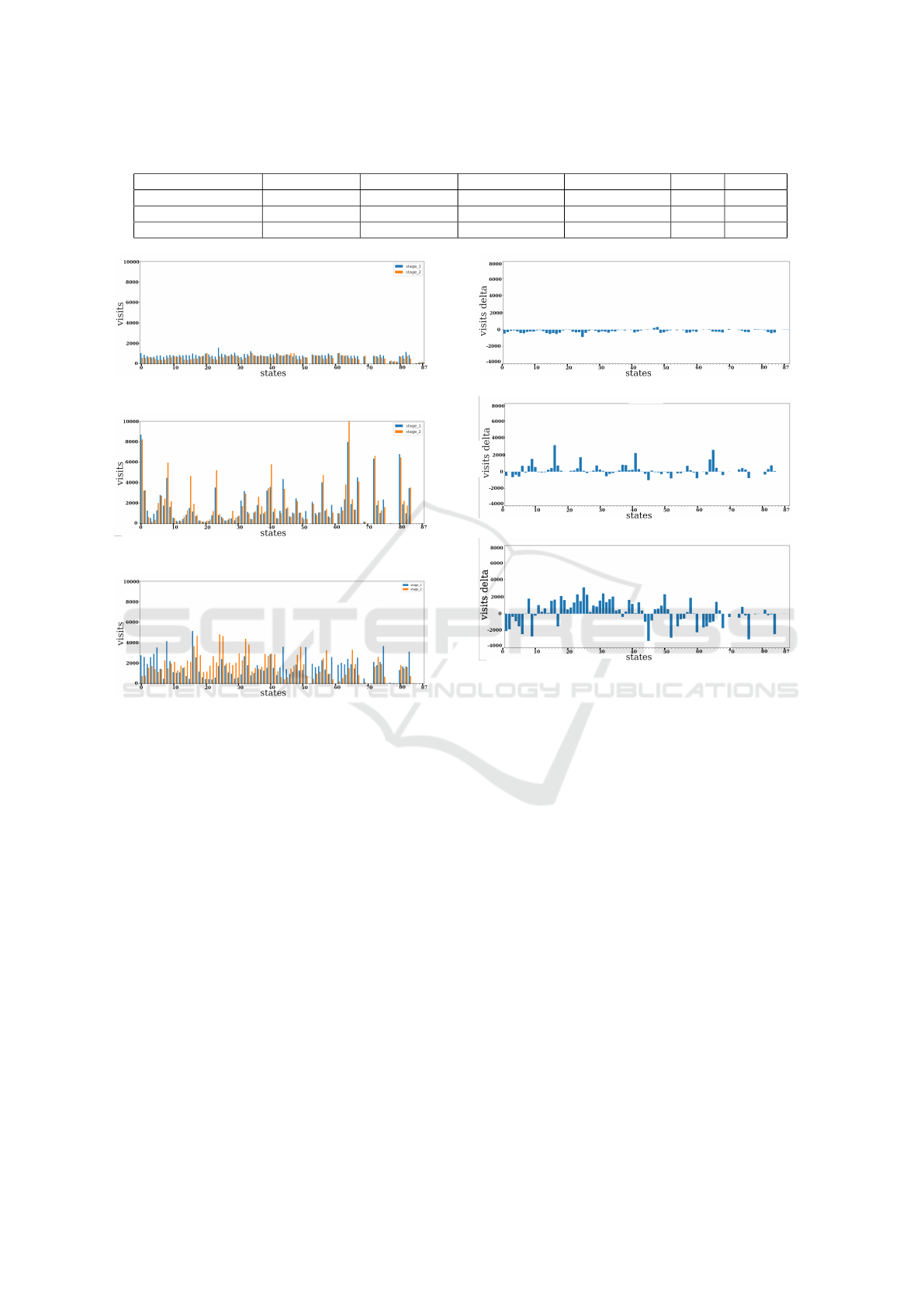
Table 2: Top 5 state visits in all 4 life stages. Union and intersection of the last two life stages.
Fist life stage Second life stage Third life stage Forth life stage Union LS3 ∩ LS4
Frontier 24, 34, 0, 20, 42 24, 62, 82, 53, 55 47, 46, 62, 45, 44 34, 61, 20, 42, 46 14 1
SOM(−quant
e
) 44, 0, 32, 59, 51 44, 0, 32, 59, 75 83, 0, 59, 32, 67 67, 0, 59, 32, 44 8 3
SOM(−quant
e
)+Frontier 44, 32, 81, 51, 6 51, 5, 44, 59, 6 51, 50, 59, 14, 44 13, 4, 12, 57, 51 13 1
(a) IM: Frontier method.
(b) IM: SOM(−quantization
error
).
(c) IM: SOM(−quant
e
) + Frontier.
Figure 3: Double bar figures.State Visits for two life stages
for an average of all 20 runs. Blue bars show the first life
stage and the orange bars show the second life stage.
agent’s behaviour in these two periods and observe
how it changes as it progresses in its lifetime. Figure
3 depicts a comparison between the initial and final
stages of different agents with different motivations.
The bars are colour-coded, with blue representing the
initial stage and orange representing the final stage.
The Frontier method encourages the agent to priori-
tize states where it believes there is more to find, pro-
moting exploration within the environment. As seen
in Figure3a, we observe that the Frontier method mo-
tivates the agent to explore all the states in a relatively
uniform way. No significant difference in state vis-
its among various states is observed, as can be seen
through the confidence interval of values for both life
stages, equaling 64.1 and 55.0 for life stages 1 and
2 respectively, within 95% confidence. Also, we can
see that the range of state visits is smaller than the
other experiments, which means a better understand-
(a) IM: Frontier method.
(b) IM: SOM(−quant
e
).
(c) IM: Frontier +SOM(−quant
e
).
Figure 4: State Visits for two life stages. Delta between
initial and final life stages of states for each IM algorithm.
ing of the environment, efficient navigation, more fre-
quent discovery of gateway states, and faster game
completion. Additionally, we observe that there is a
minimal number of visits to the final states, which
is a count of zero in the other methods. This fact
highlights the Frontier agent’s superior navigation and
learning capabilities compared to other methods. The
next experiment for SOM quant
e
, feeds the value of
quant
e
counted by SOM as an intrinsical reward to
the agent. This approach leads the agent to be in-
trinsically rewarded for the states with lower quant
e
which are exactly the areas where SOM demonstrates
greater accuracy in clustering, whether they’re close
to the cluster centres or situated far from the bound-
aries. Notably, certain states exhibit higher visita-
tion counts in Figure 3a; many of these states are
visited more frequently during the latter half of their
life stages (indicated by a higher proportion of orange
colour compared to blue). This suggests that these
states represent the centroids of the clusters, exhibit-
ing minimal quant
e
.
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
510
Finally, Figure 3c demonstrates combining the
Frontier motivation with quant
e
and we can see the
combination of characters of both other methods. The
centroid values are not extremely high and the explo-
ration seems more uniform. The results in this figure
highlight the effectiveness of the Frontier method in
promoting exploration in all other methods presented
in this study.
Next, we aim to analyze the behaviour of the agent
across two distinct life stages. Hence, we have com-
puted the delta between the final and initial life stages
(Stage2 − Stage1) and visualized the results in Fig-
ure 4. Interpreting Figure 4, there are different per-
spectives to consider: If Stage2 > Stage1, it signifies
that the agent visited states more often in its second
life stage, as shown by the positive value, suggesting
increased interest in these states during this period.
Conversely, if Stage2 < Stage1, the negative value in-
dicates that states were more frequently visited in the
first half of the agent’s life, with reduced motivation
to revisit them in the second half.
This Figure further supports the observation high-
lighted in the previous bar charts, indicating that the
Frontier method promotes increased exploration by
the agent. The Delta bar in Figure 4a corresponds
to the Frontier method, exhibiting a relatively narrow
range of values compared to the other experiments,
indicating that the difference between the second and
first life stages for each state is more consistent and
closer together. This proves the fact that the Frontier
method is explored in a more uniform way. Addi-
tionally, the predominantly negative delta values sug-
gest that the agent is visiting the states less in its sec-
ond life stage, which means it learned and understand
the states better. The next Figure 4b also proves the
behaviour of the SOM error agent we have seen in
Figure 4. We can see that the agent tends to visit
some states more in the second life stage resulting in
a greater positive value corresponding to the centroids
of the clusters. The last experiment which is the com-
bination of two methods, can be seen in 4c.
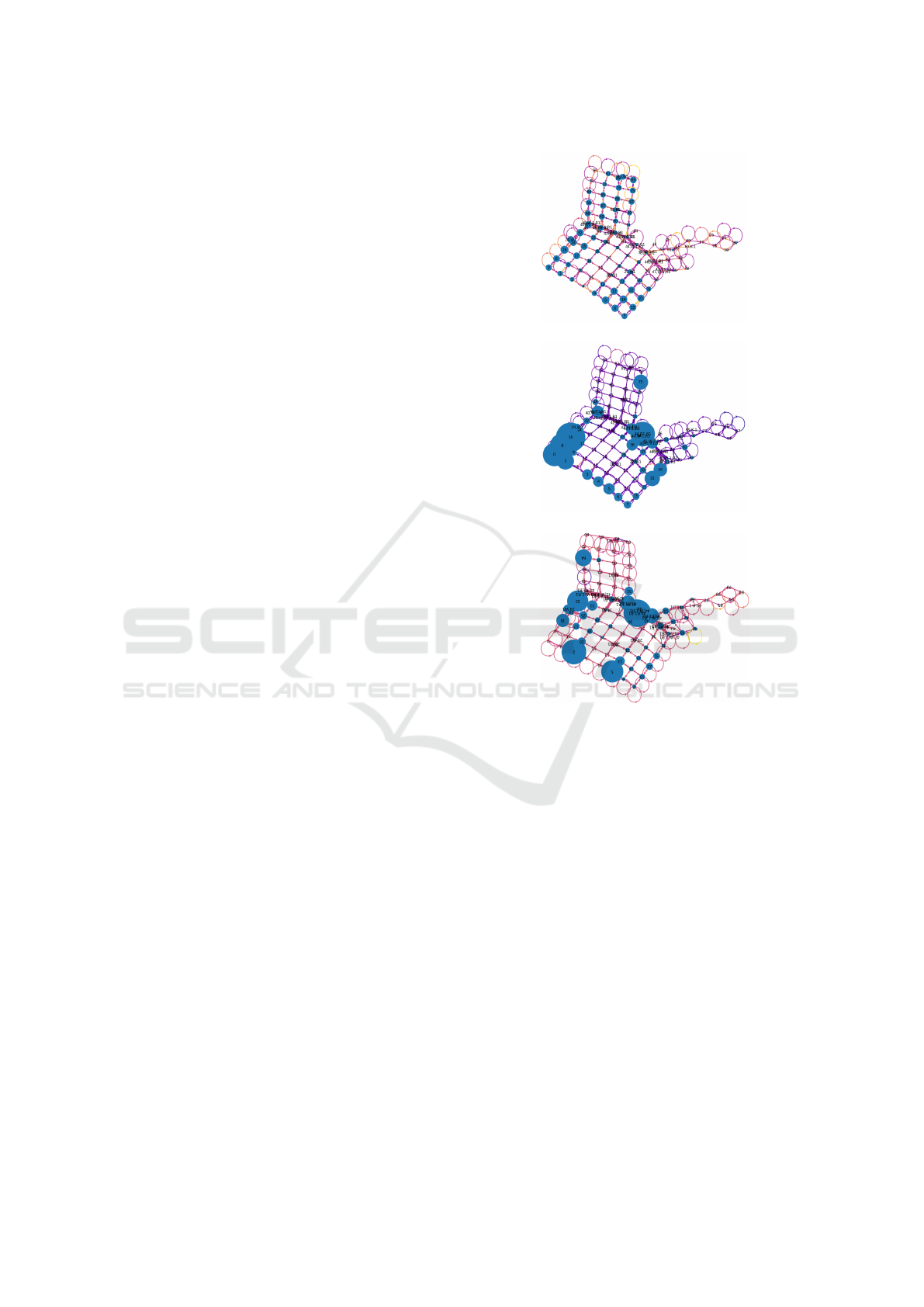
Graph Visualization for Agent’s Life Stages. In
this section, we aim to present the visualizations of
our state-transition graphs for our three different mo-
tivations. To understand the graphs better we have
presented the delta of the first and second life stages
for each graph. By calculating the difference in state
visitation between these two stages (Stage2− Stage1)
, we recorded and visualized the visitation changes on
the graphs.
In the Frontier method Graph 5a, the sizes of
the nodes are mostly similar and smaller than the
other methods which shows the difference between
(a) IM: Frotier method.
(b) IM: Frontier +SOM(−quant
e
)
(c) IM: SOM (−quant
e
).
Figure 5: Graph representations for proposed methods.
the agent’s first and second lifespans is smaller. These
findings align with the results discussed in the pre-
vious section, where we established that the Frontier
method enables the agent to navigate more uniformly
and learn better than the other methods. In the graph
generated from SOM with the −quant
e
technique (see
Figure 5c), we observe that certain states are larger in
size, indicating that the agent tends to visit them more
frequently during the second life stage. This pattern
corresponds to the centroids of the clusters formed by
the SOM algorithm. (We have inverted the graph for
better comparison with the other two experiments.)
The last experiment, as depicted in Graph 5b,
combines the characteristics of the two previous ex-
periments: SOM(−quant
e
) and Frontier. The agent
not only visits certain states more frequently, as seen
in the SOM experiment, but it also explores other
states beyond just the centroids of clusters, which is
a characteristic of the Frontier method. This combi-
nation of strategies allows the agent to have a more
Using Abstraction Graphs to Promote Exploration in Curiosity-Inspired Intrinsic Motivation
511
(a) IM algorithm: Frontier.
(b) IM algorithm: SOM (−quant
e
).
(c) IM algorithm : SOM(−quant
e
) + Frontier.
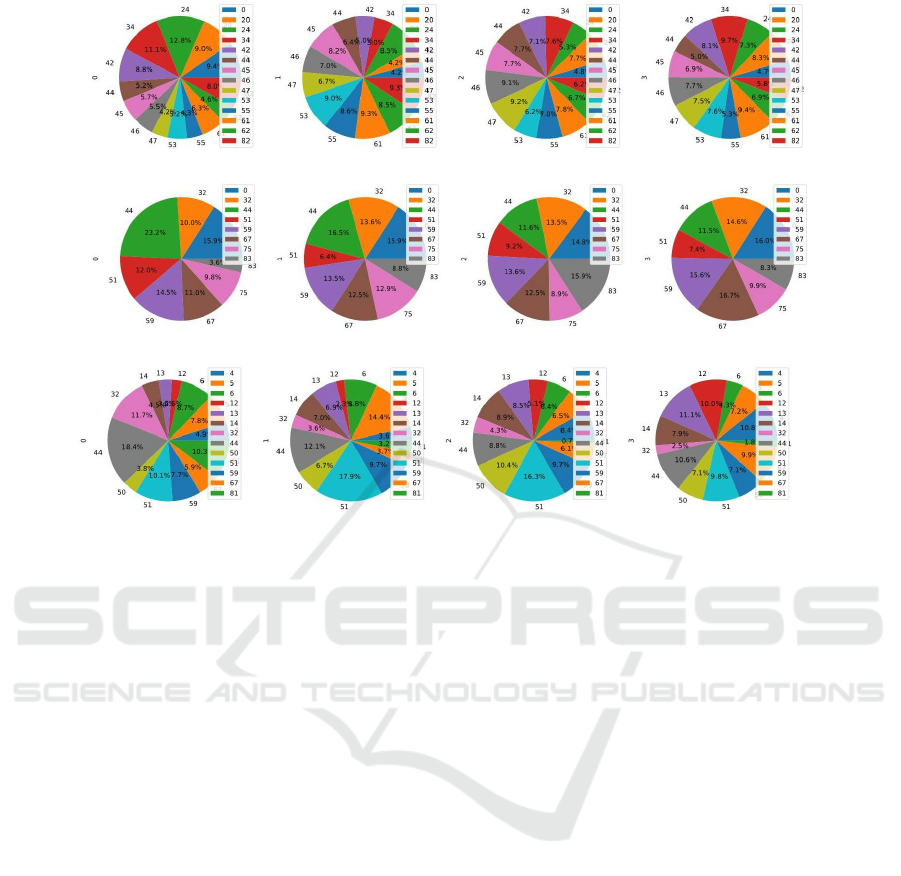
Figure 6: Top 5 steps visits of all life stages.
balanced exploration pattern, considering both moti-
vation methods.
Analysis of Key States in Different Stages of the
Agent’s Life. In this section, we divide our agents’
life stages into four equal parts and study how im-
portant nodes evolve in each phase. We consider the
most frequently visited node as the most important.
To illustrate the agent’s visits to the other top states in
different life stages, Figure 6 presents the results for
the top 5 states across all four stages together. More-
over, to gain a deeper understanding of the changes
occurring in the nodes, we present a table (2) listing
the top five states with the highest visitation counts
for each life stage.
Figure 6a, representing the Frontier method,
demonstrates a larger total number of states when
considering the top 5 states for each life stage. Addi-
tionally, by referring to Table 2, it becomes apparent
that the Frontier method exhibits a higher count in the
union of the top 5 visited states across all episodes.
These observations indicate that the Frontier method
explores more and accumulates a greater number of
state visits compared to other methods.
Figure 6b showing the SOM(−quant
e
) motivation
method, demonstrates reduced navigation, indicating
a tendency to focus on visiting clusters. This obser-
vation is further supported by examining Table 2 for
the same method, where the number of unions is 8,
representing the minimum count among the unions of
other methods.
By combining the two methods we can see the
agent is choosing fewer states in total to visit which
can be defined as a medium behaviour between catch-
ing specific clusters and exploring more. Figure 6c
and Table 2 also support this fact by showing more
exploration than the SOM error method and less count
of state visits.
As we can see, the agent is exploring more in the
first episodes to learn more.
5 CONCLUSION AND FUTURE
WORKS
This paper has proposed a method to incrementally
build a graph representation of the agents environ-
ment, and use this graph to analyse the behaviours
of different IM agents. We examined this approach
in a simulated computer game environment and com-
pared it to the SOM IM model. Based on our findings,
our proposed Frontier method demonstrates a higher
tendency towards exploration of all aspects of the en-
vironment in a relatively uniform manner.SOM error
algorithm demonstrates that the agent prefers to visit
states which are typically closer to the centroids of the
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
512

clusters generated by the SOM. And lastly, the combi-
nation of the Frontier method with SOM yields a more
subtle behaviour in terms of clustering. This trans-
lates to a better understanding of the environment and
an accelerated process of finalizing the game.
Future work could employ graph representation to
uncover diverse agent behaviours by extracting more
graph data, such as cycle counts or frequently visited
paths, for better competence understanding. It can
also be applied to hierarchical RL to monitor skills
and behaviours across different levels.
REFERENCES
Aubret, A., Matignon, L., and Hassas, S. (2021). Elsim:
End-to-end learning of reusable skills through intrin-
sic motivation. In Machine Learning and Knowl-
edge Discovery in Databases: European Confer-
ence, ECML PKDD 2020, Ghent, Belgium, September
14–18, 2020, Proceedings, Part II, pages 541–556.
Springer.
Baraldi, A., Alpaydm, E., and Simplified, A. (1998). a new
class of art algorithms. International Computer Sci-
ence Institute, Berkley, CA.
Bellemare, M., Srinivasan, S., Ostrovski, G., Schaul, T.,
Saxton, D., and Munos, R. (2016). Unifying count-
based exploration and intrinsic motivation. Advances
in neural information processing systems, 29.
Buabin, E. (2013). Understanding reinforcement learning
theory for operations research and management. In
Graph Theory for Operations Research and Manage-
ment: Applications in Industrial Engineering, pages
295–312. IGI Global.
Clements, W. R., Van Delft, B., Robaglia, B.-M., Slaoui,
R. B., and Toth, S. (2019). Estimating risk and uncer-
tainty in deep reinforcement learning. arXiv preprint
arXiv:1905.09638.
Din, F. S. and Caleo, J. (2000). Playing computer games
versus better learning.
Eysenbach, B., Salakhutdinov, R. R., and Levine, S. (2019).
Search on the replay buffer: Bridging planning and
reinforcement learning. Advances in Neural Informa-
tion Processing Systems, 32.
Fritzke, B. (1995). A growing neural gas network learns
topologies, vol. 7.
Grossberg, S. (1976). Adaptive pattern classification and
universal recoding: I. parallel development and cod-
ing of neural feature detectors. Biological cybernetics,
23(3):121–134.
Huang, Z., Liu, F., and Su, H. (2019). Mapping state space
using landmarks for universal goal reaching. Ad-
vances in Neural Information Processing Systems, 32.
Jin, J., Zhou, S., Zhang, W., He, T., Yu, Y., and Fakoor, R.
(2021). Graph-enhanced exploration for goal-oriented
reinforcement learning. In International Conference
on Learning Representations.
Kohonen, T. (2012). Self-organization and associative
memory, volume 8. Springer Science & Business Me-
dia.
Marsland, S., Nehmzow, U., and Shapiro, J. (2005). On-
line novelty detection for autonomous mobile robots.
Robotics and Autonomous Systems, 51(2-3):191–206.
Merrick, K. E. and Maher, M. L. (2009). Motivated rein-
forcement learning: curious characters for multiuser
games. Springer Science & Business Media.
Pathak, D., Agrawal, P., Efros, A. A., and Darrell, T. (2017).
Curiosity-driven exploration by self-supervised pre-
diction. In International conference on machine learn-
ing, pages 2778–2787. PMLR.
Peng, X. B., Chang, M., Zhang, G., Abbeel, P., and Levine,
S. (2019). Mcp: Learning composable hierarchi-
cal control with multiplicative compositional policies.
arXiv preprint arXiv:1905.09808.
Skupin, A., Biberstine, J. R., and B
¨
orner, K. (2013). Visu-
alizing the topical structure of the medical sciences: a
self-organizing map approach. PloS one, 8(3):e58779.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement
learning: an introduction mit press. Cambridge, MA,
22447.
Tu, L. A. (2019). Improving feature map quality of som
based on adjusting the neighborhood function. In Al-
musaed, A., Almssad, A., and Hong, L. T., editors,
Sustainability in Urban Planning and Design, chap-
ter 5. IntechOpen, Rijeka.
Using Abstraction Graphs to Promote Exploration in Curiosity-Inspired Intrinsic Motivation
513
