
Learning-Based Inverse Dynamic Controller for Throwing Tasks with a
Soft Robotic Arm
Diego Bianchi
1,2 a
, Michele Gabrio Antonelli
3 b
, Cecilia Laschi
4 c
,
Angelo Maria Sabatini
1,2 d
and Egidio Falotico
1,2 e
1
The BioRobotics Institute, Scuola Superiore Sant’Anna, Pontedera, Italy
2
Departement of Excellence in Robotics and AI, Scuola Superiore Sant’Anna, Pisa, Italy
3
Department of Industrial and Information Engineering and Economics, University of L’Aquila, L’Aquila, Italy
4
Department of Mechanical Engineering, National University of Singapore, Singapore, Singapore
Keywords:
Soft Robotics, Throwing, Open-Loop Control, Neural Network, Ballistic Task.
Abstract:
Controlling a soft robot poses a challenge due to its mechanical characteristics. Although the manufacturing
process is well-established, there are still shortcomings in their control, which often limits them to static
tasks. In this study, we aim to address some of these limitations by introducing a neural network-based
controller specifically designed for the throwing task using a soft robotic arm. Drawing inspiration from
previous research, we have devised a method for controlling the movement of the soft robotic arm during
the ballistic task. By employing a feed-forward neural network, we approximate the relationship between the
actuation pattern and the resulting landing position. This enables us to predict the input sequence that needs to
be transmitted to the robot’s actuators based on the desired landing coordinates. To validate our approach, we
conducted experiments using a 2-module soft robotic arm, which was utilized to throw four different objects
towards ten target boxes positioned beneath the robot. We considered two actuation modalities, depending
on whether the distal module was activated. The results indicate a success rate, defined as the proportion
of successful trials out of the total number of throws, of up to 68% when a single module was actuated.
These findings demonstrate the potential of our proposed controller in achieving successful performance of
the throwing task using a soft robotic arm.
1 INTRODUCTION
Soft robots, often inspired by biological systems
(Laschi et al., 2016; Polygerinos et al., 2017), are con-
structed using hyper-elastic materials with a Young’s
modulus comparable to that of biological skin (Rus
and Tolley, 2015), typically ranging from 10
4
to 10
9
Pa. These robots offer several advantages over tradi-
tional robots, including the potential for low-cost and
safe human interaction due to their energy-absorbing
capabilities during collisions. Despite their unique
characteristics and wide range of potential applica-
tions, soft robots have yet to realize their full potential
(Katzschmann et al., 2018; Holland et al., 2017), pri-
a
https://orcid.org/0000-0001-7148-1612
b
https://orcid.org/0000-0001-8437-9131
c
https://orcid.org/0000-0001-5248-1043
d
https://orcid.org/0000-0003-3306-6498
e
https://orcid.org/0000-0001-8060-8080
marily due to sensing and control limitations.
While soft robots have been evaluated for dynamic
tasks such as trajectory tracking, there are still nu-
merous real-world dynamic tasks that remain unex-
plored (Fischer et al., 2022). In (Fischer et al., 2022),
the authors demonstrate the potential of soft robots in
various dynamic tasks, including ballistic tasks where
objects are thrown along linear trajectories. How-
ever, there is a lack of control strategies specifically
tailored for achieving ballistic tasks with soft robots,
particularly in accurately tossing an object into a user-
defined target box. Therefore, the objective of our
work is to develop a control strategy to enable soft
robots to perform ballistic tasks, precisely throwing
objects into predetermined target boxes.
Despite classical robots, which are designed to
maximise the performance of an operation, soft robots
thanks to their materials are characterised by low-
cost fabrication, high deformability, and compliance.
However, this has a cost in terms of accuracy and
424
Bianchi, D., Antonelli, M., Laschi, C., Sabatini, A. and Falotico, E.
Learning-Based Inverse Dynamic Controller for Throwing Tasks with a Soft Robotic Arm.
DOI: 10.5220/0012184200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 424-432
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

payload. These properties make them suitable for
delicate handling(Li et al., 2017) and operation in
unstructured environments as scenarios like assistive
robotics(Manti et al., 2016) and search and rescue
missions(Hawkes et al., 2017) can represent. How-
ever, the non-linearity of the materials combined
with the fact that soft robots show virtually infinite
degrees-of-freedom, and that their properties depend
on the environment in which they work, require in-
novation in the control systems(Wang and Chortos,
2022) because it is challenging to apply directly the
conventional robotic control theory which has been
developed for rigid robots.
The main challenges that a soft robotic control
system must face are high dimension morphology and
the time-varying combined with the non-linear be-
haviour of the soft material. For these reasons, it
is really challenging to model them. Furthermore,
we need an accurate and computationally efficient
representation to create a controller over the model.
However, achieving both characteristics is difficult for
a soft robotic model. Indeed, with Finite Element
Analysis(Ilievski et al., 2011) (FEM) we can achieve
the biggest accuracy among the other type of models
which make some exemplificative assumptions, such
as the Constant Curvature (Webster and Jones, 2010)
(CC), the Piecewise Constant Curvature(Runge and
Raatz, 2017) (PCC) and Cosserat rod models (Gaz-
zola et al., 2018) (Alessi et al., 2023).
A promising alternative is represented by Machine
Learning (ML) algorithms which could discover the
underlying structure of the data that in our case is
the model of the robot without any assumptions. ML
techniques have already been used to create static and
dynamic controllers (Laschi et al., 2023) even if there
are some limitations. Firstly, since it is a data-driven
approach to work properly it requires a (large) dataset
whose collection may be time-consuming. Then,
data might not represent the whole behaviour of the
robot but just part of it i.e., the one captured in the
dataset. In (Giorelli et al., 2013), the authors de-
veloped the earliest machine-learning controller for a
non-redundant soft robot. They demonstrated the uti-
lization of a neural network as an approximation of
the inverse kinematics of the robot.
Later, this work has been extended in
(George Thuruthel et al., 2017) to account for
redundancies based on previous works (Vannucci
et al., 2014; Vannucci et al., 2015). However,
achieving a dynamic task with a quasi-static model or
in general with a model that relies on the steady-state
assumption is impossible since its accuracy during
fast movements is limited. Due to severe limitations
in speed, throwing would not be possible with
controllers based on these models.
To overcome these limitations, model-free dy-
namic controllers have been developed. Different
open-loop strategies (Thuruthel et al., 2019), (Cen-
turelli et al., 2021) are present in the literature to con-
trol the manipulator dynamic in a trajectory tracking
task. Both works represent a model-free approach in
which recurrent neural networks are deployed to ob-
tain the model of the soft robot. Then in (Centurelli
et al., 2022) the authors designed a closed-loop con-
troller able to deal with different payloads attached
to the manipulator end-effector thanks to a deep rein-
forcement learning method. Recently, this tolerance
to external payloads has been achieved with contin-
ual learning in (Piqu
´
e et al., 2022), where the authors
learnt the dynamic models of the robot with differ-
ent attached weights without encountering the well-
known problem of catastrophic forgetting.
All the proposed approaches, have been devel-
oped for a specific task, the trajectory following, and
are not suitable for ballistic movements, where reach-
ing the realising point with a specified velocity de-
termines the range of the throws. Indeed, for rigid
robots, this ability has been implemented for exam-
ple (Fang et al., 2021) and (Raptopoulos et al., 2020).
Both experienced an increased work capacity and effi-
ciency of a robot, especially in a weakly structured lo-
gistics sorting scene. While in (B
¨
uchler et al., 2022),
the authors show the ballistic movement of a muscu-
lar robot, in particular, they highlight the issues as-
sociated with this fast movement on rigid robot hard-
ware components. Instead in (Zeng et al., 2019), the
authors deployed a hybrid controller to grasp an ob-
ject with an anthropomorphic robot and then toss it
at a specific target placed in front of it. The analyti-
cal model of the robot is used to make an estimation
of the control parameters once the physical problem
is solved thanks to some constraints imposed on the
movement. As stated above, this approach is diffi-
cult to implement with a soft robot since the dynamic
model of the robot is not always available or in gen-
eral accurate. However, lately, this task has been ex-
plored also with soft robots. The feasibility of the
ballistic task has been demonstrated by (Fischer et al.,
2022). Meanwhile, two controllers have been devel-
oped, first in simulation and then on an real robot, for
throwing an object into a target box. These controllers
are described in (Bianchi et al., 2022) and (Bianchi
et al., 2023). The simulation-based work utilizes an
optimization process that provides the desired landing
position and predicts the actuation patterns needed to
reach it. In (Bianchi et al., 2023), the authors present
a real-time controller that employs a deep reinforce-
ment learning method.
Learning-Based Inverse Dynamic Controller for Throwing Tasks with a Soft Robotic Arm
425
In this work, we present a learning-based inverse
dynamic controller approach to performing the toss-
ing task with a soft robot. It is an open-loop con-
troller in which we trained an artificial neural network
to learn the relationship between the landing positions
and the actuation patterns necessary to reach them.
Since it is based on a single neural network, the in-
verse model of the task, the controller works in real-
time because it instantaneously predicts the actuation
pattern given a new goal position. We tested this real-
time methodology on a modular pneumatic platform
with which we tossed objects of different shapes and
weights in several directions to explore the robot’s ca-
pabilities and our controller.
2 MATERIALS AND METHODS
In this section, we will first present an overview of the
approach we developed throughout the work. Then,
after describing the experimental setup used to test the
controller we will pass through the two main phases
that brought to its development, i.e., the dataset col-
lection and the training of the neural network on
which our controller is based.
2.1 Our Approach
Target
Predicted
actuation pattern
TRAINING
Landing positions
Actuation pattern
Inverse model of the task
Figure 1: Neural Network-based open-loop controller.
Our approach is described in Figure 1. By learning
the relationship between the landing positions and the
actuation patterns to reach them in the training phase,
our learning-based inverse dynamic controller is able
to predict the actuation pattern according to the de-
sired target position.
We defined the throwing trajectories before gath-
ering the dataset to train the neural network. Inspired
by (Braun et al., 2012), we opted for a planar tra-
jectory. To enhance the dynamics of the soft robot
we choose to perform a back-swing before moving
toward the target goal. We can identify two distinct
phases in the robot’s movement: 1) the run-up phase;
and 2) the forward phase. We established that the ob-
ject should be released when the robot passes for the
lowest position of the trajectory after the back-swing.
Once collected, we used the dataset to train a feed-
forward artificial neural network, the inverse model
of the task, to approximate the relationship between
landing positions and actuation patterns, i.e., the com-
mands that we sent to the robot. Each actuation pat-
tern includes the commands responsible for the two
phases of the movement.
Once trained, we used the inverse model of the
task to perform the throws into target boxes. In this
phase, we assess the effectiveness of the approach that
is threatened by the approximation error of the neu-
ral network and the exemplifications made during the
dataset collection. We conducted tests on our con-
troller using objects of various shapes and weights, as
well as different target locations.
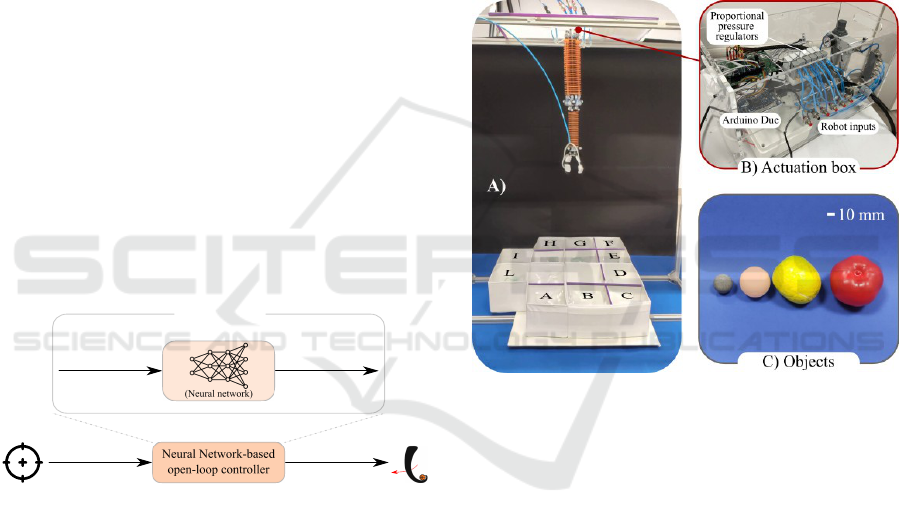
Figure 2: Experimental setup. A) The I-support robot
equipped with a pneumatic gripper is positioned over ten
designated target boxes used for the experiments. B) The
control box used to actuate the robot. C) Various objects,
including a toy lemon, a marker, and a ping-pong ball, were
thrown as part of the experiments and were also utilized in
training the neural networks.
2.2 Experimental Setup
We tested our controller on a modular robot, the I-
Support (Manti et al., 2016)(Figure 2A). Each mod-
ule presents three pairs of pneumatic McKibben-like
actuators equally spaced on a circumference and there
are several plastic disks to arrange the chambers in the
module. To inflate the six chamber (p
max
= 1 bar) we
used a custom actuation unit made of several pneu-
matic pressure regulators controlled with ArduinoDue
(Figure 2B).
The robot is mounted on an aluminium frame in
a vertical downward position to reduce the effect of
the gravitational force and due to weight concerns,
the two modules have different sizes. The two mod-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
426
ules are connected together, thanks to a plexiglass in-
terface, with an offset of 60 °. The fixed-end of the
robot is 1000 mm distant from the ground in which
we placed the target boxes(Figure 2A). Each box is
geometrically equivalent to a square prism, whose di-
mensions are [140 ×140 ×100] mm.
In the experiments, we toss in the target boxes
with different objects (Figure 2C) whose mass and di-
mensions are shown in Table 1.
Table 1: Tossed objects. Physical characteristics of the ob-
ject used during the experiments.
Object
Characteristic
dimension [mm]
Mass [g]
Ping-pong ball 36 0.8
Lemon (toy) 62 4.8
Marker 26 3.2
Tomato (toy) 63 10.2
To hold an object during the linear trajectory
we equipped our robot with a two-finger gripper.
Each finger is made of 3D-printed surfaces joined to-
gether with thermoplastic polyurethane (TPU) cham-
bers. We characterised the gripper’s opening time. To
do that we perform fifty closing-and-opening cycles
where we measure the time interval from the instant
in which the command is sent and the one in which
the distance between the two fingers in ∼60 mm (ap-
proximately the dimension of the biggest object taken
into account). We assessed that the opening time of
the gripper is equal to ∼ 0.2 ±0.01 s.
To detect the position of the sections of interest we
used a vision-based motion capture system (VICON
Motion Capture Ltd) thanks to which we were able to
track the movement of the object and the robot.
2.3 Dataset collection
The first phase of our approach is the collection of the
dataset. We decided to have a linear movement and
to divide it into two different phases: 1) Run-up; and
2) Forward, as in (Braun et al., 2012). This division
aims to increase the speed of the robot in the over-
all movement which results in an increased throwing
capacity.
To respect the counter-movement condition that
we applied to the trajectory we realised a geometri-
cal model of the throwing trajectory. Let us take as
an example the model illustrated in Figure 3A. We
can identify six bending directions associated with the
different chambers of the robot (1, 2, 3 for the proxi-
mal module and 4, 5, 6 for the distal one), and let us
identify a local reference frame (xy). In relation to its
working principle, if we inflate chamber 1 of the soft
robot it will bend along the negative y-axis. To avoid
interference we need to prevent the simultaneous in-
flation of the chamber placed in the same direction,
such as 3 and 4.
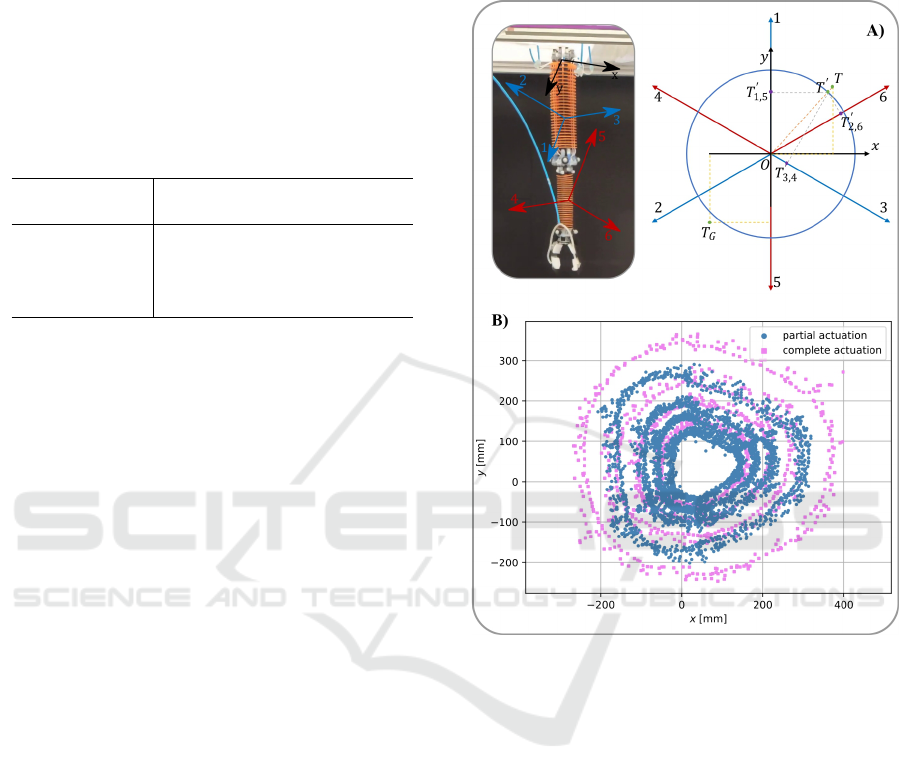
Figure 3: Training datasets. A) On the left, the identification
of the major bending direction while on the right, the geo-
metrical model of the throwing trajectory. B) represents the
dataset used to train the neural networks for the controller in
the two actuation scenarios analysed, respectively the par-
tial and complete. These datasets have been obtained by
averaging the dataset collected with the following objects:
1) ping pong ball; 2) vicon marker; 3) lemon (toy).
By knowing the coordinates of the goal point
T
G
(x
T
G
; y
T
G
), we can find the throwing direction that
enables us to toss an object in that direction, which is
represented by the line that passes for this point and
the origin of the reference system. Instead, to find
an approximative relationship between the actuations,
we first took the desired point T
G
, and we identified
the objective point T (x
T
; y
T
) by taking the symmet-
ric of the goal point to the origin of the reference sys-
tem, in other words, T = (−y
T
G
; −x
T
G
). Then, we
projected the objective point on the circle of radius
equal to one centred in the centre of the reference sys-
tem. To obtain the relationships and conditions pre-
sented in Table 2, starting from the previously found
Learning-Based Inverse Dynamic Controller for Throwing Tasks with a Soft Robotic Arm
427

point T
′
(x
T
′
; y
T
′
), we calculated the projection of it
on the six bending axes. The length of the projection
is proportional to the pressure we have to send to the
actuator.
Table 2: Input patterns generation. To enable the move-
ment of the I-Support robotic arm to respect the counter-
movement constraint, the actuation inputs (i.e., pressure
signals) are adjusted based on the geometric relationship.
Specifically, the point T
G
, representing the desired goal
point, is symmetrically reflected across the origin of the
axes to obtain a new point T . This new point is projected
onto the circumference of a unit radius (T
′
).
Dir x
T
′
i
y
T
′
i
Condition
1 0 y
T
′
y
1
≥ 0
2
3x
T
′
+
√
3y
T
′
4
√
3x
T
′
+y
T
′
4
x
2
≤ 0; y
2
≤ 0
3
3x
T
′
−
√
3y
T
′
4
y
T
′
−
√
3x
T
′
4
x
3
≥ 0; y
3
≤ 0
4
3x
T
′
−
√
3y
T
′
4
y
T
′
−
√
3x
T
′
4
x
4
≤ 0; y
4
≥ 0
5 0 y
T
′
y
5
≤ 0
6
3x
T
′
+
√
3y
T
′
4
√
3x
T
′
+y
T
′
4
x
6
≥ 0; y
6
≥ 0
We imposed that the first phase has to last
t
run−up
= 0.50 s while the overall movement t
tra j
=
2.00 s. The object is manually placed between the
gripper fingers and then it is released at t
e ject
= 0.97 s,
i.e., approximately the time instant in which the robot
passes through the lowest point of the trajectory after
the run-up phase. We collected more than one thou-
sand trajectories by randomly sampling the point P
in the xy plane. The overall process lasted two hours
and fifteen minutes. For each trajectory, we saved the
simulated landing position and the actuation pattern
sent to the robot. To obtain the landing position co-
ordinates, starting from the positions and velocities
given by the motion tracking system we simulated the
throws with the projectile equations.
We repeated this process twice to collect the data
in the two actuation scenarios analysed in this work:
1) Partial, in which the distal module, i.e., the one
on which is attached the gripper, is passive; 2) Com-
plete, where all the six chambers are combined. In
each case we collected the dataset with three different
held objects the ping-pong ball, the marker and the
lemon (toy) and then we average them to obtain the
final dataset. The datasets are averaged to develop
a controller that is not object-specific. The weight
of the end effector impacts the dynamics of a robot,
including its trajectories and controller performance
during throwing tasks with various objects. This ef-
fect can be amplified when combined with a size-
independent opening time. Figure 3B represents the
average dataset in the partial and complete actuation
scenario on which we trained, as shown in the next
section, the neural networks.
2.4 Neural Network Training
With the datasets represented in Figure 3B, with a
feed-forward neural network we mapped the landing
positions with the actuation pattern associated with
them, as in (1).
(τ
run−up
, τ
f orward
) = f (x
LP
) (1)
Where the first term is the entire actuation input com-
posed of the run-up phase and the forward one.
The model is represented by an artificial neural
network (ANN) with one hidden layer. We performed
a model selection based on the average error on the
actuation components to choose the best combination
of hyperparameters. We have changed the number of
units of the hidden layer, their activation function, and
the type of input normalisation. Default values have
been used for the different hyperparameters collected
in Table 3. In addition, to expedite the learning pro-
cess, the early stopping method has been considered.
In both cases, the input layer presents three neu-
rons, i.e., the coordinates of the landing position,
while the output layer depends on the actuation sce-
nario. Indeed, we have six units and twelve units
respectively with partial and complete actuation. In
both cases, the output layer implements the ReLU ac-
tivation function because the predictions of the ANN
are pressure values. The results of the model selection
are reported in Table 3.
3 RESULTS
To test our controllers, the robot performed throws
towards ten target boxes of objects different in size
and weight Figure 2A. We selected the box positions
to test the controller in different directions. We per-
formed our tests in two scenarios: 1) partial actuation,
in which just the module attached to the frame is actu-
ated, and 2) complete actuation, where all the cham-
bers of the bi-modular robot can be inflated. In our
experiments we decided to perform two types of tests:
1) quantitative ones, in which we tracked, thanks to
the motion capture system, the movement of the ob-
ject, i.e., its trajectory; and 2) qualitative tests (shown
in Figure 4), in which we recorded the movement of
the overall system to assess if the task was successful
or not. We have success if the object fell inside the
target box, with or without bouncing on the box bor-
ders. In both types of tests, we analysed the ability
of the robot to generate actuation patterns to allow the
soft robot to toss the object into the desired target. We
performed three trials for each combination of param-
eters (object type, qualitative/quantitative test, target
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
428

Table 3: Neural network training. In this table, we collected the different hyperparameters that we changed and keep fixed
during the training of the inverse model of the task, in the two distinguished actuation scenarios.
Default values
learning rate 0.001 Optimiser Adam
batch’s size 16 Loss function MSE
number of epochs 4000 Training/test partition 0.90
Best combination of the changed parameters
Hyperparameter Partial Actuation Complete actuation
Number of units 64 128
Activation function ReLU tanh
Normalisation Z-score Z-score
Figure 4: An example of the qualitative experiment. A
throw toward the target box “I” with the Lemon (Toy) in
the complete actuation scenario.
position), that led to 240 throws for each actuation
modality (partial and complete). The results of the
qualitative and quantitative tests are summarised re-
spectively in Figure 5 and Figure 6. Here we have an
idea of the performance of the controllers in the two
actuation scenarios. Figure 5 is obtained by analysing
the recorded trials to check if the trials were success-
ful or not (object in/object out). We defined success
rate as the ratio between the number of successful
throws and the total number of throws performed.
This index is equal to 55.83 % for the complete ac-
tuation modality and 68.33 % for the other.
The boxplots in Figure 6 illustrate the perfor-
mance of the controllers based on the quantitative
tests. These boxplots represent the distribution of er-
rors, specifically the Euclidean distance between the
desired target (the centre of the box) and the actual
landing position. The tests were conducted across
three trials for each combination of object targets.
Based on the results shown in the boxplots, the av-
erage error for the partial actuation scenario is 61.34
mm, while for the complete actuation scenario, the
average error is 80.87 mm. These values indicate the
average discrepancy between the desired and actual
landing positions, providing a quantitative measure of
the performance of the controllers.
4 DISCUSSION AND
CONCLUSION
In this work, we show that despite the lower dy-
namic and a more challenging control than traditional
robotics, a soft robot can perform a task as complex
as tossing an object inside different target boxes.
Our results show that the neural network-based
controller reaches a performance in successfully toss-
ing objects to target locations, as high as ∼56 ÷68 %
on average (depending on the actuation pattern used).
These results are highly influenced by the impossibil-
ity of the controller to generate appropriate actuation
patterns for some targets. Indeed, if we describe the
performance of the controller based on the median,
which is less sensitive to the outliers than the average,
we will obtain for the complete and partial actuation
scenario an average error of 65.69 mm and 54.44 mm
respectively.
These values are comparable to those found in
the state-of-the-art. In their publication, Bianchi et
al. (Bianchi et al., 2023) utilized a real-time open-
Learning-Based Inverse Dynamic Controller for Throwing Tasks with a Soft Robotic Arm
429

Figure 5: Qualitative results for the neural network-based controllers. The results are shown with respect to the object and
each column is proportional to the successful trials. The maximum number of throws for each target is 12, as three attempts
are made for each object.
Figure 6: Comparison between the controller in different
actuation scenarios based on the distance from the target
position, which was reconstructed by recording the falling
trajectories of the object during a toss with the Motion Cap-
ture System.
loop controller for a bi-modular robot based on a
deep reinforcement learning (RL) method. The RL-
based controller was tested in both partial and com-
plete actuation scenarios, and the authors achieved a
success rate of approximately ∼ 62 ÷63 %. Com-
pared to the current state of the art, this study presents
a controller that exhibits similar real-time characteris-
tics and comparable or slightly better performance in
certain instances. Significantly, the inverse dynamic
method requires only a fraction of the time needed
to train the neural network compared to the training
time of the RL agent. However, the method described
in (Bianchi et al., 2023) shows the same performance
in both actuation modalities.
From Figures 5 and 6, the difference between the
performance in the two scenarios is clear. . The neu-
ral network in the complete actuation scenario has a
poor ability to generate appropriate patterns due to the
ill-posed problem. In this case, we are asking the net-
work, given three input values (the desired landing
coordinates), to predict the twelve values to perform
both the run-up and forward phases. On the contrary,
the problem is simpler in the case where the robot has
a passive module, as we will have only six values to
predict.
However, the performance of the controllers can
be improved by acting in several levels of the pro-
posed approach. Firstly, we could improve the collec-
tion of the data by trying to pass from a geometrical
model of the throwing trajectory (equations collected
in Table 2) to a model-free approach or in general a
more detailed model. Additionally, in every trial, the
object can have different initial conditions since we
manually place it which increases the variability of
our experimental data.
The gripper has a remarkable influence on the
overall experiments because it influences the initial
kinematic conditions of the object in its free-fall for-
ward target box. In our experiments, we determined
an opening time based on the biggest object that we
planned to toss and we consider that in our throwing
task specification. However, the objects are consid-
erably different from each other, so the small objects
were released before the ideal realising instant. That
led to an increased variability of the data and a lower
accuracy of the controller.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
430

ACKNOWLEDGMENT
We acknowledge Andrea Centurelli for the help pro-
vided during the development of the proposed ap-
proach.
This work was partially supported by the Euro-
pean Union’s Horizon 2020 FET-Open program under
grant agreement no. 863212 (PROBOSCIS project).
REFERENCES
Alessi, C., Falotico, E., and Lucantonio, A. (2023). Abla-
tion study of a dynamic model for a 3d-printed pneu-
matic soft robotic arm. IEEE Access, 11:37840–
37853.
Bianchi, D., Antonelli, M., Laschi, C., and Falotico, E.
(2022). Open-loop control of a soft arm in throwing
tasks. In 19th International Conference on Informat-
ics in Control, Automation and Robotics, pages 138–
145. ISSN: 2184-2809.
Bianchi, D., Antonelli, M. G., Laschi, C., Sabatini, A. M.,
and Falotico, E. (2023). SofToss: Learning to Throw
Objects with a soft robot. IEEE Robotics and Automa-
tion Magazine.
Braun, D. J., Howard, M., and Vijayakumar, S. (2012).
Exploiting variable stiffness in explosive movement
tasks. Robotics: Science and Systems VII, 7:25–32.
B
¨
uchler, D., Calandra, R., and Peters, J. (2022). Learning to
Control Highly Accelerated Ballistic Movements on
Muscular Robots. Robotics and Autonomous Systems,
page 104230.
Centurelli, A., Arleo, L., Rizzo, A., Tolu, S., Laschi, C., and
Falotico, E. (2022). Closed-loop Dynamic Control of
a Soft Manipulator using Deep Reinforcement Learn-
ing. IEEE Robotics and Automation Letters, pages 1–
1. Conference Name: IEEE Robotics and Automation
Letters.
Centurelli, A., Rizzo, A., Tolu, S., and Falotico, E. (2021).
Open-loop Model-free Dynamic Control of a Soft Ma-
nipulator for Tracking Tasks. In 2021 20th Inter-
national Conference on Advanced Robotics (ICAR),
pages 128–133.
Fang, Z., Hou, Y., and Li, J. (2021). A pick-and-throw
method for enhancing robotic sorting ability via deep
reinforcement learning. In 2021 36th Youth Academic
Annual Conference of Chinese Association of Automa-
tion (YAC), pages 479–484.
Fischer, O., Toshimitsu, Y., Kazemipour, A., and
Katzschmann, R. K. (2022). Dynamic Task Space
Control Enables Soft Manipulators to Perform Real-
World Tasks. Advanced Intelligent Systems, page
2200024.
Gazzola, M., Dudte, L. H., McCormick, A. G., and Ma-
hadevan, L. (2018). Forward and inverse problems in
the mechanics of soft filaments. Royal Society Open
Science, 5(6):171628. Publisher: Royal Society.
George Thuruthel, T., Falotico, E., Manti, M., Pratesi,
A., Cianchetti, M., and Laschi, C. (2017). Learning
closed loop kinematic controllers for continuum ma-
nipulators in unstructured environments. Soft robotics,
4(3):285–296.
Giorelli, M., Renda, F., Ferri, G., and Laschi, C. (2013). A
feed-forward neural network learning the inverse ki-
netics of a soft cable-driven manipulator moving in
three-dimensional space. In 2013 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems,
pages 5033–5039. ISSN: 2153-0866.
Hawkes, E. W., Blumenschein, L. H., Greer, J. D., and
Okamura, A. M. (2017). A soft robot that navigates
its environment through growth. Science Robotics,
2(8):eaan3028. Publisher: American Association for
the Advancement of Science.
Holland, D. P., Abah, C., Velasco-Enriquez, M., Herman,
M., Bennett, G. J., Vela, E. A., and Walsh, C. J.
(2017). The Soft Robotics Toolkit: Strategies for
Overcoming Obstacles to the Wide Dissemination of
Soft-Robotic Hardware. IEEE Robotics & Automa-
tion Magazine, 24(1):57–64. Conference Name: IEEE
Robotics & Automation Magazine.
Ilievski, F., Mazzeo, A. D., Shepherd, R. F., Chen, X.,
and Whitesides, G. M. (2011). Soft Robotics for
Chemists. Angewandte Chemie International Edition,
50(8):1890–1895.
Katzschmann, R. K., DelPreto, J., MacCurdy, R., and
Rus, D. (2018). Exploration of underwater life with
an acoustically controlled soft robotic fish. Science
Robotics, 3(16):eaar3449. Publisher: American Asso-
ciation for the Advancement of Science.
Laschi, C., Mazzolai, B., and Cianchetti, M. (2016).
Soft robotics: Technologies and systems pushing
the boundaries of robot abilities. Science Robotics,
1(1):eaah3690. Publisher: American Association for
the Advancement of Science.
Laschi, C., Thuruthel, T. G., Lida, F., Merzouki, R., and
Falotico, E. (2023). Learning-based control strategies
for soft robots: Theory, achievements, and future chal-
lenges. IEEE Control Systems, 43(3):100 – 113.
Li, S., Vogt, D. M., Rus, D., and Wood, R. J. (2017).
Fluid-driven origami-inspired artificial muscles. Pro-
ceedings of the National Academy of Sciences,
114(50):13132–13137. Publisher: Proceedings of the
National Academy of Sciences.
Manti, M., Pratesi, A., Falotico, E., Cianchetti, M., and
Laschi, C. (2016). Soft assistive robot for personal
care of elderly people. In 2016 6th IEEE International
Conference on Biomedical Robotics and Biomecha-
tronics (BioRob), pages 833–838. ISSN: 2155-1782.
Piqu
´
e, F., Kalidindi, H. T., Fruzzetti, L., Laschi, C., Men-
ciassi, A., and Falotico, E. (2022). Controlling
Soft Robotic Arms Using Continual Learning. IEEE
Robotics and Automation Letters, 7(2):5469–5476.
Conference Name: IEEE Robotics and Automation
Letters.
Polygerinos, P., Correll, N., Morin, S. A., Mosadegh, B.,
Onal, C. D., Petersen, K., Cianchetti, M., Tolley,
M. T., and Shepherd, R. F. (2017). Soft Robotics:
Review of Fluid-Driven Intrinsically Soft Devices;
Manufacturing, Sensing, Control, and Applications
Learning-Based Inverse Dynamic Controller for Throwing Tasks with a Soft Robotic Arm
431

in Human-Robot Interaction. Advanced Engineering
Materials, 19(12).
Raptopoulos, F., Koskinopoulou, M., and Maniadakis, M.
(2020). Robotic Pick-and-Toss Facilitates Urban
Waste Sorting *. In 2020 IEEE 16th International
Conference on Automation Science and Engineering
(CASE), pages 1149–1154. ISSN: 2161-8089.
Runge, G. and Raatz, A. (2017). A framework for the au-
tomated design and modelling of soft robotic systems.
CIRP Annals, 66(1):9–12.
Rus, D. and Tolley, M. (2015). Design, fabrication and con-
trol of soft robots. Nature, 521:467–75.
Thuruthel, T. G., Falotico, E., Renda, F., Flash, T.,
and Laschi, C. (2019). Emergence of behavior
through morphology: a case study on an octopus in-
spired manipulator. Bioinspiration & biomimetics,
14(3):034001.
Vannucci, L., Cauli, N., Falotico, E., Bernardino, A., and
Laschi, C. (2014). Adaptive visual pursuit involving
eye-head coordination and prediction of the target mo-
tion. In 2014 IEEE-RAS International Conference on
Humanoid Robots, pages 541–546.
Vannucci, L., Falotico, E., Di Lecce, N., Dario, P., and
Laschi, C. (2015). Integrating feedback and predic-
tive control in a bio-inspired model of visual pursuit
implemented on a humanoid robot. Lecture Notes in
Computer Science (including subseries Lecture Notes
in Artificial Intelligence and Lecture Notes in Bioin-
formatics), 9222:256–267.
Wang, J. and Chortos, A. (2022). Control Strategies for
Soft Robot Systems. Advanced Intelligent Systems,
n/a(n/a):2100165.
Webster, R. J. and Jones, B. A. (2010). Design and
Kinematic Modeling of Constant Curvature Contin-
uum Robots: A Review. The International Journal
of Robotics Research, 29(13):1661–1683. Publisher:
SAGE Publications Ltd STM.
Zeng, A., Song, S., Lee, J., Rodriguez, A., and Funkhouser,
T. (2019). TossingBot: Learning to throw arbitrary ob-
jects with residual physics. Proceedings of Robotics:
Science and Systems (RSS).
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
432
