
Neural Network-Based Approach for Supervised
Nonlinear Feature Selection
Mamadou Kanout
´
e, Edith Grall-Ma
¨
es and Pierre Beauseroy
Computer Science and Digital Society Laboratory (LIST3N), Universit
´
e de Technologie de Troyes, Troyes, France
Keywords:
Neural Network, Multi-Output Regression, Supervised Nonlinear Feature Selection.
Abstract:
In machine learning, the complexity of training a model increases with the size of the considered feature space.
To overcome this issue, feature or variable selection methods can be used for selecting a subset of relevant
variables. In this paper we start from an approach initially proposed for classification problems based on a
neural network with one hidden layer in which a regularization term is incorporated for variable selection
and then show its effectiveness for regression problems. As a contribution, we propose an extension of this
approach in the multi-output regression framework. Experiments on synthetic data and real data show the
effectiveness of this approach in the supervised framework and compared to some methods of the literature.
1 INTRODUCTION
The latest technological advances allow the collection
of data from various devices . They can produce many
measurements of different types (categorical, continu-
ous) allowing them to describe the monitored system.
To infer some results not all features might be useful,
some contain no information or are redundant. To set
up a model on these data for a prediction problem, for
example, these variables must be studied to keep only
the relevant ones. Variable selection is a data analysis
technique that allows the selection of relevant vari-
ables by removing redundancy and non-informative
variables and the selection is made with respect to one
or more target variables. These target variables can be
categorical or continuous. Many methods of variable
selection have been proposed for the case of a single
target variable using statistical methods, information
theory, and neural networks and can be categorized
into three groups:
• Filter methods use statistical measures between
the target variable and other variables to select im-
portant variables such as (He et al., 2005) where
the laplacian score is used as a statistical measure.
• Wrapper methods are based on learning models
whose relevance of the selected variables depends
on the performance of the learning model, in
(Maldonado and Weber, 2009) the authors do the
feature selection using Support Vector Machine as
a learning model.
• Embedded methods add the selection constraint in
the initial formulation of the prediction model as
a regularization term to properly estimate the tar-
get variable while determining the important ones.
One of the best-known methods is Lasso (Tibshi-
rani, 2011), an approach that adds a regularization
l
1
in the formulation of a linear prediction prob-
lem to constrain weights to be sparse coefficients
representing the predictor variables.
Many of these methods exploit only the linear rela-
tionships between the variables. In (Yamada et al.,
2014), (Song et al., 2012), (Song et al., 2007) the au-
thors propose a nonlinear feature selection method for
a single target variable based on Hilbert-Schmidt In-
dependence Criterion (Gretton et al., 2005), a nonlin-
ear dependency measure using kernel methods. The
complexity of this approach lies in finding the right
kernel and its parameter.
In recent years, another type of variable selection
methods in the supervised framework has attracted
the attention of researchers. It uses several target vari-
ables based on multi-task learning (Zhang and Yang,
2018), a subdomain of machine learning in which sev-
eral learning tasks are solved at the same time while
exploiting commonalities and differences between the
tasks. A good example is multi-output regression,
a regression problem with several continuous target
variables as tasks. Many applications for multi-output
regression have been studied. Approaches in the lin-
ear and nonlinear case have been proposed, in partic-
ular those using single hidden layer neural networks.
In this paper, we are interested in problems of non-
linear supervised variable selection with one or sev-
eral target variables applied to regression problems
on continuous variables. Starting from a variable se-
Kanouté, M., Grall-Maës, E. and Beauseroy, P.
Neural Network-Based Approach for Supervised Nonlinear Feature Selection.
DOI: 10.5220/0012185700003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 431-439
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
431

lection approach initially used for classification prob-
lems with a single target variable, our contribution is
as follows:
• Apply this method for regression problems with a
single target variable.
• Propose an extension of this approach in the case
of selection with several target variables.
The core part of the paper is organized as follows: in
section 2, notations are introduced and related works
are detailed. In section 3, the method used as well
as its extension in the multi-output regression is ex-
posed. Experimental results are given and discussed
in section 4. Finally, in section 5 conclusions are
drawn and perspectives are proposed.
2 NOTATIONS AND RELATED
WORKS
In this section, firstly some notations used in the paper
are given and secondly an overview of previous work
related to our work is given.
2.1 Notations
The following notations are used:
• S is the set of variables in the dataset.
• S
Y
and S
X
form a partition of S . They denote re-
spectively the set of target variables and the set of
predictor variables.
S
X
∪ S
Y
= S and S
X
∩ S
Y
=
/
0.
• X and Y are matrices of observations whose vari-
ables are respectively in S
X
and S
Y
.
• For any matrix M, the vectors M
i
and M
j
are the
i
th
row and j
th
column of M respectively.
• For any matrix M ∈ R
n×d
, the Frobenius norm
(Noble and Daniel, 1997) is defined as follows:
||M||
F
=
q
tr(M
T
M) =
r
∑
1≤i≤n
∑
1≤ j≤d
m
2
i j
(1)
• For any matrix M ∈ R
n×d
, the l
2,1
norm (Ding
et al., 2006) is defined as follows:
||M||
2,1
=
n
∑
i=1
v
u
u
t
d
∑
j=1
m
2
i j
(2)
The ||.||
2,1
norm applies the l
2
norm to the col-
umn elements and the l
1
norm to the computed
row norm. This norm, therefore, makes it possi-
ble to impose sparsity on the rows of M.
• For two matrices M ∈ R
n×d
and
b
M ∈ R
n×d
, the
Mean Squared Error (MSE) is defined as follows:
MSE(M,
b
M) =
1
nd
d
∑
j=1
n
∑
i=1
(m
i j
−
b
m
i j
)
2
=
1
nd
||M −
b
M||
2
F
(3)
2.2 Related Works
In this section, some selection methods related to our
work are described. In (Obozinski et al., 2006) the
authors propose Multi-task Lasso. It is a selection
approach based on multi-task learning, a concept al-
lowing to jointly solve several tasks defined by a set
of features S
Y
and regularization l
2,1
defined in sec-
tion 2.1. Multi-task Lasso therefore makes it possible
to jointly solve several related regression tasks i.e the
variables of interest in S
Y
by simultaneously selecting
variables in S
X
common to the different tasks. The
regression coefficient matrix of variables noted W is
determined by minimizing the following expression:
L
C
(W ) = ||Y − XW ||
2
F
+C||W ||
2,1
, (4)
C is the regularization parameter for sparsity. The
larger is C the sparser is W . This parameter tunes
the trade-off between the estimation of the target vari-
ables and the number of selected variables. Once C
∗
the optimal C has been determined according to a cri-
terion, the importance of each variable is determined
by calculating the Euclidean norm of its correspond-
ing row in W , and variables with low impact can be re-
moved from the model. This method exploits only the
linear relationships between the variables. In (Wang
et al., 2021), the authors propose NFSN (Nonlinear
Feature Selective Networks), a nonlinear approach for
variable selection for several target variables. This
method is based on a single hidden layer neural net-
work and the addition of a regularization l
2,1
on the
weight matrix of the hidden layer for joint selection.
The expression to be optimized is:
L
C
(Θ) =
1
2N
||Y −
b
Y ||
2
2
+C||W
(1)
||
2,1
(5)
where
• Θ = {W
(1)
, W
(2)
, b
(1)
, b
(2)
} is the set of neural net-
work parameters to be optimized where W
(1)
and
W
(2)
are respectively the weight matrices of the
hidden layer and the output layer and b
(1)
and b
(2)
are the corresponding biases.
•
b
Y = σ
1
(XW
(1)
+ b
(1)
)W
(2)
+ b
(2)
where σ
1
is an
activation function.
• C is the regularization parameter for sparsity (as
defined in Equation 4).
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
432

• N is the sample size.
Once C
∗
is determined, the importance of each
variable i is determined by calculating the Euclidean
norm of its corresponding row in W
(1)
i.e ||W
(1)
i
||
2
.
These two methods allow variable selection with
several target variables, Multi-task Lasso exploits
only linear relationships between variables while
NFSN exploits nonlinear relationships between vari-
ables. In both of these approaches, the importance of
variables is determined by taking the Euclidean norm
over the rows of a weight matrix and ranking the vari-
ables according to these calculated norms. Here the
goal is to determine in a nonlinear way the coefficient
associated with each variable.
3 PROPOSED APPROACH
In this part, the formulation of the based approach de-
veloped is introduced. This approach was initially in-
troduced to tackle a classification problem. An exten-
sion of this approach is proposed for the multi-output
regression framework. In section 4 it is shown that it
can be used for regression problems.
3.1 Initial Approach for Classification
In (Challita et al., 2016) the variable selection is
performed using a type of neural network called
Extreme learning machine (Huang et al., 2006) .
It is a neural network with one single hidden layer
where the weight matrix of the hidden layer is ran-
domly generated and not updated. Only the weight
matrix of the output layer is updated. According to
(Huang et al., 2006) these models can produce good
generalization performance and have a much faster
learning process than neural networks trained using
gradient backpropagation. The variable selection
method is based on the idea of assigning a weight to
each attribute. In the beginning, the weights of all
attributes are equal. The main goal of the method
is to adjust the weights of the different attributes to
minimize the classification error. Attributes with
high values of weights are important and should be
kept. Attributes with low values of weights are not
important and can be removed. An illustration of the
approach is given in Figure 1.
Let N be the sample size and p the number of
variables.
Let NNeur be the number of neurons in the hidden
layer.
Let X = [a
1
, ··· , a
p
]
T
∈ R
p×N
where a
i
∈ R
N
is the
realisation of feature i for all observations and Y is a
vector of labels containing -1 or 1.
Figure 1: Architecture of the used approach.
The selection of features is done by minimizing
L
λ,C
(Θ) = ||Y −Y
α
||
2
2
+ λ||W
(2)
||
2
2
+C
p
∑
i=1
(D
α
)
ii
(6)
where
• Y
α
∈ R
N×1
is the network output. It is defined as
follows
Y
α
= S
α
W
(2)
= σ
1
[(W
(1)
X
α
)
T
]W
(2)
(7)
where
– σ
1
is an activation function. In (Challita et al.,
2016), σ
1
(.) = tanh(.).
– W
(1)
∈ R
NNeur×(p+1)
is the weight matrix of the
hidden layer that contains the bias coefficient.
It is a random matrix.
– W
(2)
∈ R
NNeur×1
is the weight matrix of the
network output also containing the bias.
– X
α
= D
α
X
0
is a (p + 1) × N matrix whose vari-
ables are weighted
where
*
X
0
=
X
1
T
N
is (p + 1) × N matrix where 1
N
is
a vector of R
N
containing only 1.
*
D
α
∈ R
(p+1)×(p+1)
is a diagonal matrix con-
taining the weight associated with each vari-
able such that (D
α
)
i,i
= α
i
where
α
i
∈ [0, 1] is the weight associated with each
variable i for i = 1, · · · , p.
α
p+1
is the weight associated with the fixed
input (bias). α
p+1
= 1.
• C is the regularization parameter for sparsity that
allows setting some α
i
to 0.
Neural Network-Based Approach for Supervised Nonlinear Feature Selection
433

• λ is the regularization parameter allowing better
stability and better generalization.
W
(2)
and D
α
are the unknowns, Θ = (W
(2)
, D
α
).
3.2 Determination of Parameters
The determination of the optimal parameters W
(2)∗
and D
∗
α
is crucial for estimating the target variable
and the selection of variables. To optimize the model,
W
(2)
and D
α
are updated alternately and iteratively.
That is, W
(2)
is updated with D
α
fixed and vice versa.
D
α
is initialized as an identity matrix.
For fixed D
α
, in (Challita et al., 2016) W
(2)
is up-
dated by calculating the derivative of Equation 6 with
respect to W
(2)
, which leads to the simple closed form
solution:
W
(2)∗
=
S
T
α
Y
(S
α
S
T
α
+ λI)
(8)
For fixed W
(2)
, D
α
the diagonal matrix with α
i
as
its diagonal entries is updated. To take into account
the constraints on α
i
for i = 1, . . . , p defined in sec-
tion 3.1 , the optimization problem is reformulated as
follows:
minimize
α
i
L
λ,C
(Θ)
subject to α
i
− 1 ≤ 0, −α
i
≤ 0, i = 1, . . . , p.
(9)
As in (Challita et al., 2016), the partial deriva-
tive of Equation 6 with respect to α
i
is approximated
by numerical methods. The optimization problem of
Equation 9 is solved by optimization algorithms.
3.3 Multi-Output Regression
Based on the formulation given in (Challita et al.,
2016) which is adapted to the single task problem,
a new method named FS-ELM meaning Feature Se-
lection using Extreme Learning Machine is proposed.
This method can tackle multi output regression prob-
lems where the number of variables in S
Y
is greater
than 1. The proposed method replaces the l
2
norm in
the objective function and the constraint on W
(2)
by
the Frobenius norm where W
(2)
∈ R
NNeur×card(S
Y
)
.
L
λ,C
(Θ) is reformulated as follows:
L
λ,C
(Θ) = ||Y −Y
α
||
2
F
+ λ||W
(2)
||
2
F
+C
p
∑
i=1
(D
α
)
ii
(10)
where
• The derivative of L(Θ) with respect to W
(2)
re-
mains the same as in Equation 8.
• The update of D
α
remains the same as defined in
Equation 9.
4 EXPERIMENTS
In this part, two sets of variables S
X
and S
Y
corre-
sponding respectively to available variables and vari-
ables to be inferred are assumed to be defined. The ef-
fectiveness of the proposed approach to select a subset
of relevant variables in S
X
for estimating S
Y
is shown.
The subsection 4.1 is about the evaluation of FS-
ELM on synthetic data and the subsection 4.2 on real-
world data. For a single target variable, the proposed
method is compared with Lasso, NFSN, and for sev-
eral target variables, the comparison is made with
Multi-task Lasso, NFSN. To show the effectiveness
of the proposed method and to compare it with other
methods, the procedure is composed of three steps:
• Determine C
∗
and λ
∗
the optimal values of C and
λ according to a criterion on the MSE.
– for C ∈ I
C
with I
C
= {10
−4
, 10
−3
, . . . , 10
3
, 10
4
}
*
for λ ∈ I
λ
with I
λ
= {10
−4
, 10
−3
, . . . , 10
3
, 10
4
}
· Compute
b
Y
(λ,C)
the estimate of Y associated
with C and λ on a train data set.
– Choose (C
∗
, λ
∗
) ∈ I
C
× I
λ
such that
(C
∗
, λ
∗
) = argmin
(C,λ)∈I
C
×I
λ
MSE(Y, Y
(λ,C)
) (11)
(C
∗
, λ
∗
) ∈ I
C
× I
λ
is a pair of values that
minimize MSE(Y, Y
(λ,C)
) ∀ (C, λ) ∈ I
C
× I
λ
using a test data set.
For Multi-task Lasso, NFSN and Lasso ap-
proaches where C is the only parameter to be
tuned, the procedure is similar to the one above
but only C
∗
is determined.
• Once hyperparameters are chosen, for each ap-
proach, rank the variables according to their im-
portance.
– For Lasso, rank the variables according to the
ordered values of the absolute value of the co-
efficients of the linear regression model.
– For Multi-task Lasso and NFSN, rank the vari-
ables as defined in section 2.2.
– For FS-ELM, rank the variables according to
the scaling factors α
i
.
• Evaluate the pertinence of ranking for each ap-
proach by building p models on the train data set
and evaluating them on the test data set by keeping
from 1 to p variables corresponding to the highest
rank.
The evaluation model used is a single hidden
layer neural network with 500 neurons. The
activation function is relu and the optimizer is
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
434
adam.
The relevance of the selected variables is evalu-
ated using the MSE of the estimated model.
To avoid scaling problems, the variables of matrices
X and Y are normalized (a pre-processing technique
of removing the mean and scaling to unit variance ap-
plied to each variable).
The validation of the results is done by 5-fold cross-
validation.
4.1 Synthetic Data Set
Firstly, 8 Gaussian features were defined. Then 10
random features that depend on these 8 Gaussian fea-
tures with nonlinear relationships were defined. Fi-
nally, 4 other independent Gaussian features were
added. Then data were generated from these 22 fea-
tures as described below.
• f
1
∼ N (1, 5
2
) ; f
2
∼ N (0, 2
2
) ; f
3
∼ N (2, 7
2
)
• f
4
∼ N (5, 3
2
), f
5
∼ N (0, 1); f
6
∼ N (0, 0.3
2
)
• f
7
∼ N (3, 2
2
); f
8
∼ N (11, 1)
• f
9
= sin( f
1
) + ε
f
9
, ε
f
9
∼ N (0, 0.08
2
)
• f
10
= log(| f
3
|) + ε
f
10
, ε
f
10
∼ N (0, 0.08
2
)
• f
11
= cos( f
2
) + ε
f
11
, ε
f
11
∼ N (0, 0.1
2
)
• f
12
= f
2
1
sin(
f
3
f
1
) + ε
f
12
, ε
f
12
∼ N (0, 0.04
2
)
• f
13
= f
3
2
+ f
2
f
2
3
− f
2
2
+ f
2
3
+ ε
f
13
, ε
f
13
∼
N (0, 0.02
2
)
• f
14
= f
5
( f
2
4
+ log(f
2
5
)) + ε
f
14
, ε
f
14
∼ N (0, 0.08
2
)
• f
15
= f
2
5
+ f
6
(sin( f
5
+ f
2
6
)) + ε
f
15
, ε
f
15
∼
N (0, 0.08
2
)
• f
16
=
f
7
f
8
f
2
7
+ f
2
8
+ ε
f
16
, ε
f
16
∼ N (0, 0.04
2
)
• f
17
= sin(e
− f
2
7
) + ε
f
17
, ε
f
17
∼ N (0, 0.01
2
)
• f
18
= cos(sin( f
8
)) + ε
f
18
, ε
f
18
∼ N (0, 0.08
2
)
• f
19
, f
20
, f
21
, f
22
∼ N (0, 1).
The set of variables is S = { f
1
, ··· , f
22
}
On the generated data, experiments have been
done in two cases for S
Y
, with S
X
= S \ S
Y
.
For the first experiment, S
Y
= { f
15
}. Figure 2a
shows the estimated value of the mean of the MSE
for the variables of S
Y
versus log(C). For Lasso
C
∗
= 10
−2
, for FS-ELM C
∗
= 10
2
, λ
∗
= 10
−3
and
for NFSN C
∗
= 10
−4
. After the choice of the regu-
larization parameters, the list of ranked variables for
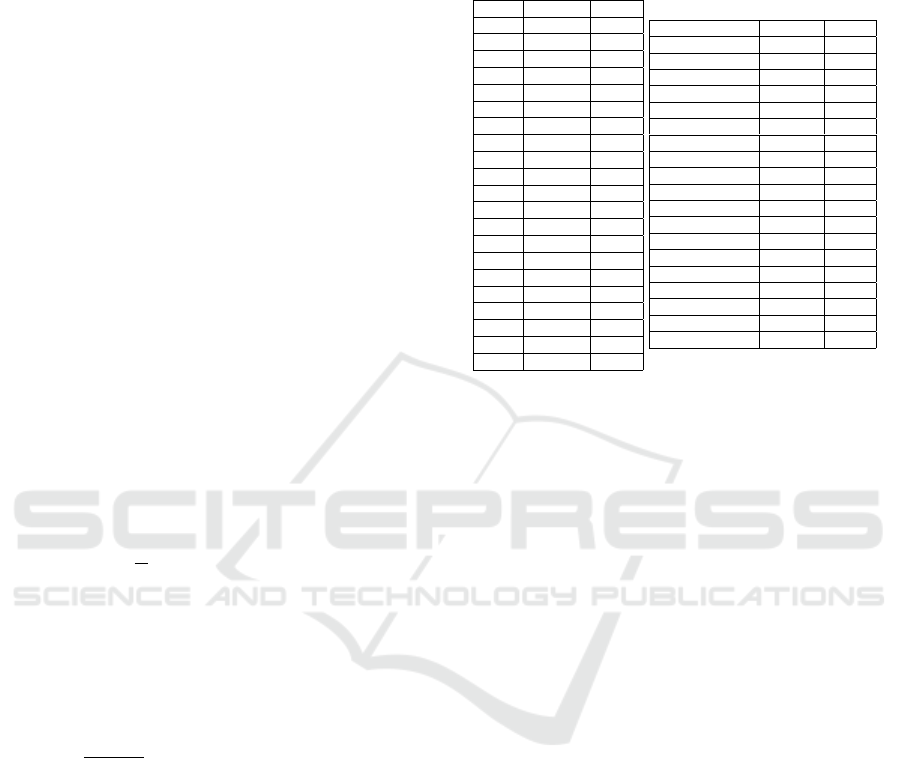
Table 1: List of ranked variables for each approach. Vari-
ables in bold are the ideal variables that should be selected
by the approaches.
(a) S
Y
= { f
15
}.
Lasso FS-ELM NFSN
f
14
f
5
f
5
f
22
f
6
f
6
f
7
f
18
f
14
f
6
f
21
f
18
f
4
f
16
f
22
f
13
f
8
f
19
f
3
f
22
f
10
f
10
f
3
f
11
f
21
f
4
f
8
f
20
f
11
f
2
f
9
f
1
f
1
f
1
f
20
f
4
f
17
f
2
f
9
f
5
f
9
f
20
f
12
f
12
f
17
f
11
f
13
f
13
f
19
f
17
f
12
f
18
f
7
f
7
f
2
f
14
f
3
f
16
f
19
f
16
f
8
f
10
f
21
(b) S
Y
= { f
11
, f
17
, f
18
}.
Multi-task Lasso FS-ELM NFSN
f
16
f
7
f
7
f
7
f
2
f
8
f
8
f
8
f
2
f
3
f
16
f
16
f
5
f
22
f
19
f
2
f
3
f
3
f
6
f
1
f
15
f
13
f
14
f
9
f
9
f
5
f
20
f
14
f
21
f
22
f
22
f
6
f
13
f
20
f
10
f
1
f
12
f
20
f
14
f
21
f
4
f
6
f
15
f
13
f
5
f
1
f
15
f
4
f
10
f
9
f
10
f
4
f
19
f
12
f
19
f
12
f
21
Lasso, FS-ELM and NFSN is given in Table 1. Fig-
ure 3a shows the estimated value of the mean of MSE
versus the number of most important variables used to
build the model. It may be noticed that for NFSN and
FS-ELM the first 2 most important variables allow to
estimate well the target variable while for Multi-task
Lasso it takes the first 14 most important variables.
As the same variables were selected by NFSN and
FS-ELM, the green curve is exactly underneath the
red curve.
For the second experiment, S
Y
= { f
11
, f
17
, f
18
}.
Figure 2b shows the estimated value of the mean
of the MSE for the variables of S
Y
versus log(C).
For Multi-task Lasso C
∗
= 10
−2
, for FS-ELM C
∗
=
10
2
, λ
∗
= 10
−1
, for NFSN C
∗
= 10
−3
. Table 1b con-
tains the list of ranked variables for Multi-task Lasso,
FS-ELM and NFSN after the choice of regulariza-
tion parameters. Figure 3b shows the estimated value
of the mean of MSE versus the number of most im-
portant variables taken. It may be noticed that for
NFSN and FS-ELM the first 3 most important vari-
ables allow to estimate well the target variable while
for Lasso it takes the first 6 most important variables.
4.2 Real-World Data Sets
In this part, the proposed method is evaluated on the
real-world data sets and compared to other methods
for one and several target variables. Table 2 contains
the list of real-world data used as well as the number
of target variables, number of predictor variables, and
number of samples. Some information about the data
sets in Table 2 as well as the pre-processing of data
Neural Network-Based Approach for Supervised Nonlinear Feature Selection
435

(a) S
Y
= { f
15
} and S
X
= S \ S
Y
. (b) S
Y
= { f
11
, f
17
, f
18
} and S
X
= S \ S
Y
.
Figure 2: MSE versus log(C) on synthetic data. Lasso (blue), NFSN (green), FS-ELM (red).
(a) S
Y
= { f
15
} and S
X
= S \ S
Y
. (b) S
Y
= { f
11
, f
17
, f
18
} and S
X
= S \ S
Y
.
Figure 3: MSE versus number of most important variables on synthetic data. Lasso (blue), NFSN (green), FS-ELM (red).
(a) Bike sharing data set. (b) Air quality data set. (c) Boston house data set.
Figure 4: MSE versus log(C) on real-world data with a single target. Lasso (blue), NFSN (green), FS-ELM (red).
(a) Bike sharing dataset. (b) Air quality data set. (c) Boston house data set.
Figure 5: MSE versus number of important variables to keep for selection with a single target variable on real-world data sets.
Lasso (blue), NFSN (green), FS-ELM (red).
(a) Enb data set. (b) Atp1d data set.
Figure 6: MSE versus log(C) on real-world data sets with several target variables. Multi-task Lasso (blue), NFSN (green),
FS-ELM (red).
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
436

(a) Enb data set. (b) Atp1d data set.
Figure 7: MSE versus the number of most important variables on real-world data sets with several target variables. Multi-task
Lasso (blue), NFSN (green), FS-ELM (red).
done are described below.
• Bike sharing dataset
This data set contains monitoring data of rental
bike users in a city with 16 variables including one
target variable and 15 predictor variables. Only
the file ”hour.csv” on UCI website is used in this
paper. Among the 15 predictors variables, 7 vari-
ables are continuous, 3 variables are binary cate-
gorical and 5 are cyclical discrete variables. The
sine and cosine transformation is applied to the
cyclic variables, they are then removed and the
continuous variables are normalized. The selec-
tion approaches are applied to the obtained 20
variables in order to estimate the target variable.
• Air quality dataset
This data contains the responses of a gas multi-
sensor device deployed on the field in an Italian
city. It is composed of 15 variables including a
target variable and 14 predictors variables includ-
ing 12 continuous variables, a time variable and
a date variable. A new variable called month is
deduced from the variable date and the variable
called hour is deduced from variable time. The
sine and cosine transformation is applied to the
cyclic variables month and hour, they are then re-
moved. The selection approaches are applied to
17 variables for estimating the target variable.
• Boston house
This data set contains information collected by
the U.S Census Service concerning housing in the
area of Boston Mass. There are 14 variables in-
cluding one target variable and 13 continuous pre-
dictor variables.
• Enb dataset
This data set of 10 variables includes 2 target vari-
ables the heating load and cooling load require-
ments of the building and 8 continuous predictor
variables such as glazing area, roof area, and over-
all height, . . . The data set is taken from Mulan, an
open-source Java library for learning from multi-
label data sets and it can also be downloaded from
Table 2: Real-world data sets for variable selection.
Name Size Features Targets Source
Bike sharing 17 389 15 1 (Fanaee-T and Gama, 2013)
Air quality 9 357 14 1 (De Vito et al., 2008)
Boston house 506 13 1 (Harrison and Rubinfeld, 1978)
Enb 768 8 2 (Tsanas and Xifara, 2012)
Atp1d 337 411 6 (Xioufis et al., 2012)
their github https://github.com/tsoumakas/mulan.
• Atp1d
This dataset of 337 observations is about the pre-
diction of airline ticket prices. There are 417 vari-
ables including 6 variables as targets and 411 pre-
dictor variables. The data set is taken from Mulan.
The cases with one target are first tackled. Fig-
ure 4 shows the estimated value of the mean of the
MSE between Y and its estimate versus log(C) by 5-
fold cross-validation for each approach on the Bike
sharing, Air quality, and Boston data sets. It can be
noticed the stability of performance of FS-ELM for
large values of C compared to other methods.
For each approach and each data set, the chosen C
∗
is
described below:
• On Bike sharing dataset, C
∗
= 10
−4
for Lasso,
C
∗
= 10, λ
∗
= 10
−4
for FS-ELM and C
∗
= 10
−4
for NFSN.
• On Air quality dataset, C
∗
= 10
−4
for Lasso, C
∗
=
10
−1
, λ
∗
= 10
−1
for FS-ELM and C
∗
= 10
−4
for
NFSN.
• On Boston house dataset, C
∗
= 10
−4
for Lasso,
C
∗
= 10
−1
, λ
∗
= 10
−2
for FS-ELM and C
∗
= 10
−4
for NFSN.
Once the regularization parameters have been de-
termined for each approach, the most important vari-
ables are taken gradually, then an estimate is made
to assess the relevance of the variables taken and
to determine the number of variables to keep. The
number of important variables taken successively is
{1, 2, . . . , 20} on Bike sharing data set, {1, 2, . . . , 17}
on Air quality data set and {1, 2, . . . , 13} on Boston
house data set. Figure 5 shows the MSE between Y
and its estimate versus the number of important vari-
ables taken successively for each approach on Bike
Neural Network-Based Approach for Supervised Nonlinear Feature Selection
437

sharing, Air quality, Boston house data sets. It can
be noticed that in general FS-ELM manages to select
the variables better compared to the other approaches.
Precisely:
• On Bike sharing data set, FS-ELM performs well
in the variable selection compared to Lasso and
NFSN.
• On Air quality data set, the two first important
variables selected by FS-ELM and NFSN can es-
timate well the target variable.
• On the Boston house data set, FS-ELM performs
well compared to NFSN. Indeed, FS-ELM has the
minimum MSE for any number of selected vari-
ables. There are some variances in the MSE be-
cause there are only 508 samples.
Figure 6 shows the estimated value of the mean of
the MSE by 5-fold cross-validation between Y and its
estimate versus log(C) for each approach on the data
sets with several target variables. It can be noticed
that FS-ELM has greater stability for regularization
parameters than the other methods. For each approach
and each data set, the chosen C
∗
is described below:
• On Enb data set, C
∗
= 10
−4
for Multi-task Lasso,
C
∗
= 1, λ
∗
= 10
−3
for FS-ELM, C
∗
= 10
−4
for
NFSN.
• On Atp1d data set, C
∗
= 10
−2
for Multi-task
Lasso, C
∗
= 1, λ
∗
= 10
−2
for FS-ELM, C
∗
= 10
−2
for NFSN.
Once the regularization parameters have been
determined for each approach, the variables are
ranked for each approach. The number of important
variables taken successively is {1, 2, . . . , 8} on Enb
data set and {50, 100, 150, . . . , 400} on Atp1d data
set. Figure 7 shows the estimated value of the mean
of the MSE by 5-fold cross-validation between Y and
its estimate versus the number of important variables
taken successively for each approach and on the data
sets Enb, Atp1d. It can be noticed that in general,
FS-ELM manages to select well the relevant variables
and reach the best performance with Atp1d which is
the most challenging case.
The proposed method successfully selects the rel-
evant variables on regression problems for one and
several target variables. In addition, it can be no-
ticed that generally, FS-ELM selects better compared
to NFSN and Multi-task Lasso.
5 CONCLUSIONS
In this paper, starting from an approach that was ini-
tially proposed for a classification problem with a
single target variable, we first showed its feasibility
for regression problems with a single target variable,
then proposed an extension in the framework of multi-
output regression for variable selection with several
target variables. Finally, many experiments made on
synthetic data and real data confirm the effectiveness
of the proposed approach.
The future works would be to:
• Calculate the partial derivative of L
λ,C
(Θ) with re-
spect to the α
i
since it was not calculated in the
initial formulation and this work to improve the
optimization algorithm.
• Propose an approximation of the matrix division
made in Equation 8 to reduce the complexity of
the optimization.
• Apply the proposed extension to the unsupervised
nonlinear variable selection problems for contin-
uous variables.
ACKNOWLEDGEMENT
This work was supported by Labcom-DiTeX, a joint
research group in Textile Data Innovation between In-
stitut Franc¸ais du Textile et de l’Habillement (IFTH)
and Universit
´
e de Technologie de Troyes (UTT).
REFERENCES
Challita, N., Khalil, M., and Beauseroy, P. (2016). New
feature selection method based on neural network and
machine learning.
De Vito, S., Massera, E., Piga, M., Martinotto, L., and
Francia, G. (2008). On field calibration of an elec-
tronic nose for benzene estimation in an urban pol-
lution monitoring scenario. Sensors and Actuators B
Chemical.
Ding, C., Zhou, D., He, X., and Zha, H. (2006). R 1-
pca: Rotational invariant l 1-norm principal compo-
nent analysis for robust subspace factorization. In
ICML 2006 - Proceedings of the 23rd International
Conference on Machine Learning.
Fanaee-T, H. and Gama, J. (2013). Event labeling combin-
ing ensemble detectors and background knowledge.
Progress in Artificial Intelligence.
Gretton, A., Bousquet, O., Smola, A., and Sch
¨
olkopf, B.
(2005). Measuring statistical dependence with hilbert-
schmidt norms.
Harrison, D. and Rubinfeld, D. (1978). Hedonic housing
prices and the demand for clean air. Journal of Envi-
ronmental Economics and Management.
He, X., Cai, D., and Niyogi, P. (2005). Laplacian score for
feature selection.
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
438

Huang, G., Zhu, Q.-Y., and Siew, C. K. (2006). Extreme
learning machine: Theory and applications. Neuro-
computing.
Maldonado, S. and Weber, R. (2009). Weber, r.: A wrap-
per method for feature selection using support vector
machines. inf. sci. 179(13), 2208-2217.
Noble, B. and Daniel, J. W. (1997). Applied linear algebra.
2nd ed.
Obozinski, G., Taskar, B., and Jordan, M. (2006). Multi-
task feature selection.
Song, L., Bedo, J., Borgwardt, K. M., Gretton, A., and
Smola, A. (2007). Gene selection via the bahsic fam-
ily of algorithms. volume 23, pages i490–i498. Bioin-
formatics.
Song, L., Smola, A., Gretton, A., Bedo, J., and Borgwardt,
K. (2012). Feature selection via dependence maxi-
mization. JMLR.org.
Tibshirani, R. (2011). Regression shrinkage selection via
the lasso. In Journal of the Royal Statistical Society
Series B.
Tsanas, A. and Xifara, A. (2012). Accurate quantitative
estimation of energy performance of residential build-
ings using statistical machine learning tools. Energy
and Buildings.
Wang, Z., Nie, F., Zhang, C., Wang, R., and Li, X. (2021).
Joint nonlinear feature selection and continuous val-
ues regression network.
Xioufis, E. S., Groves, W., Tsoumakas, G., and Vlahavas,
I. P. (2012). Multi-label classification methods for
multi-target regression. CoRR.
Yamada, M., Jitkrittum, W., Sigal, L., Xing, E. P., and
Sugiyama, M. (2014). High-dimensional feature se-
lection by feature-wise kernelized lasso. MIT Press -
publishers.
Zhang, Y. and Yang, Q. (2018). An overview of multi-task
learning.
Neural Network-Based Approach for Supervised Nonlinear Feature Selection
439
