
A Linear Regression Based-Approach to Collective Gas Source
Localization
Ronnier Frates Rohrich
1 a
, Luis Felipe Messias
1 b
, Jose Lima
2,3 c
and Andre Schneider de Oliveira
1 d
1
Graduate School of Electrical Engineering and Computer Science,
Universidade Tecnol
´
ogica Federal do Paran
´
a (UTFPR), Curitiba, Brazil
2
Research Centre in Digitalization and Intelligent Robotics (Cedri),
Polytechnic Institute of Braganc¸a (IPB), Braganc¸a, Portugal
3
Institute for Systems and Computer Engineering of Porto,
INESC-TEC, Porto, Portugal
Keywords:
Mobile Robot, Olfactory Robotics, Linear Regression.
Abstract:
This work addresses the problem of gas leaks and proposes a search strategy for identifying the source of
a gas leak within a virtual simulation environment. The research focuses on designing and implementing
simulation, control, and gas source search packages using swarm robotics. The simulation employs numerical
integration strategies, while the robot swarm control is based on potential fields theory. The location of the gas
source using a weighted linear regression strategy is used to estimate the gas concentration gradient, which
plays a crucial role in the optimization strategy employed. The paper presents an overview of the key concepts
employed and their relevance to different stages of the problem and highlights the main results achieved
through the chosen strategies. A significant outcome of this work is the development of reusable software
packages applicable to various research contexts in mobile robotics.
1 INTRODUCTION
Robotic olfaction is a field of study in mobile robotics
that aims to develop autonomous systems that can de-
tect chemical substances in the environment. Within
this perspective, two significant problems arise: the
localization of substance sources and the mapping of
gas concentrations in the surroundings. Gas leakages
pose risks to human life and health. As a result, they
are regulated by strict standards worldwide, which
establish exposure limits for hazardous or unhealthy
work environments. Therefore, monitoring and con-
trolling exposure to such substances is paramount for
the health and well-being of workers in such condi-
tions.
Mobile monitoring offers a broader area cover-
age with fewer sensors, thereby decreasing monitor-
ing costs and enabling the surveillance of random
a
https://orcid.org/0000-0002-4523-8536
b
https://orcid.org/0000-0002-3587-0810
c
https://orcid.org/0000-0001-7902-1207
d
https://orcid.org/0000-0002-8295-366X
locations. This sensing naturally reduces the like-
lihood of not monitoring areas where hazards from
hazardous gases were not initially expected (Rohrich
et al., 2021). A monitoring system is critical in indus-
trial environments with potential exposure to harmful
gases. Using a swarm of mobile robots brings a range
of possibilities compared to static sensors, as they can
dynamically adapt to gas behavior in the environment.
This work will focus on the problem of gas source
localization in indoor environments without signifi-
cant airflow. There will be no fixed obstacles in the
environment; thus, the control system of the mobile
swarm will only focus on collision avoidance between
robots and collisions between robots and the environ-
ment’s walls.
Swarm robotics systems offer advantages over tra-
ditional approaches requiring less manual interven-
tion due to their robustness, flexibility, and scalabil-
ity. Developing control techniques for robot swarm
systems provides a theoretical basis for solving vari-
ous problems, including monitoring, agriculture, and
space exploration applications (Schranz et al., 2021).
Furthermore, by providing a software solution for
Rohrich, R., Messias, L., Lima, J. and Schneider de Oliveira, A.
A Linear Regression Based-Approach to Collective Gas Source Localization.
DOI: 10.5220/0012187100003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 657-664
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
657

such problems, it will be possible to investigate funda-
mental difficulties related to swarm robotics software
development. The development of mobile robotic
olfaction systems is a non-trivial problem, and ex-
cept for recent advancements, the full potential of gas
sensing by mobile robots has yet to be achieved en-
tirely (Monroy et al., 2017). Thus, this study aims
to explore the frontiers of implemented solutions and
advance toward developing new approaches.
One of the challenges encountered in such sys-
tems originates from conducting experiments in real
environments (Monroy et al., 2017). Therefore, com-
plementing previous work, a comprehensive simula-
tion and control software framework will be devel-
oped in conjunction with this study. This framework
will be applied to the gas source localization prob-
lem and will be entirely based on the Robot Oper-
ating System (ROS). Thus, the work conducted here
can serve as a foundation for investigating the disper-
sion of gas problems and other contexts where swarm
robotics may provide a potential solution.
Therefore, the approach taken in this work fo-
cuses on developing a simulation and control system
for collaborative robot swarms applied to the problem
of robotic olfaction, with the primary aim of creating
reusable software artifacts applicable to different con-
texts. The solution proposed in this work was inserted
in the real robot proposed in the work of (Rohrich
et al., 2021) as shown in Figure 1.
Figure 1: Monera robot swarm.
2 RELATED WORK
Incorporating olfactory capabilities in robots to detect
and localize chemical substances has garnered signif-
icant attention in recent research. Metal Oxide Semi-
conductor (MOX) sensors have emerged as a pop-
ular choice for gas detection due to their low cost,
flexibility in production, ease of use, wide range of
detectable gases, and potential applications. For in-
stance, (Bouras et al., 2023) employed MOX sensors
on mini drones for gas detection.
(He et al., 2023) emphasized using olfactory mo-
bile quadruped robots for odor source localization in
complex environments. However, this robotic topol-
ogy presents inherent complexities. A more efficient
approach to odor-based navigation involves multiple
mobile robots that communicate and make joint deci-
sions, which aligns with swarm robotics principles.
In robotic olfaction, employing robot swarms
shows promise for gas source localization. (Rohrich
et al., 2021) used a swarm of robots to search
for gas sources in real and simulated environments.
The study evaluated the method’s reliability regard-
ing odor measurement noise (sensor uncertainty) and
demonstrated its effectiveness. One of the key chal-
lenges in using robot swarms for gas source localiza-
tion is developing a control strategy that enables orga-
nized and collision-free movement of the robot group.
One viable strategy is the utilization of artificial po-
tential fields.
The notion of potential fields finds its roots in
physics, where the intricate interplay of forces char-
acterizes motion. It mirrors the gravitational pull to-
wards the desired target and the opposing repulsive
force originating from obstructions. When imple-
mented in the domain of trajectory planning for mo-
bile robots, potential fields gracefully accommodate
the presence of both static and dynamic obstacles. A
compelling demonstration of this application can be
observed in work (Wu et al., 2020), where they in-
geniously employed the bioinspired hybrid algorithm
known as BAS-APF (Antenna Search-based and Ar-
tificial Potential Field) for trajectory planning.
Potential fields, despite their advantages, possess
certain limitations. For instance, they may fail to
reach the point of interest due to local minima. Other
reported limitations include collisions with obstacles
and the inability to reach the goal when an obsta-
cle is close. Nevertheless, potential fields suffice for
controlling robot swarms, avoiding collisions among
themselves and with the environment’s walls, assum-
ing the absence of additional fixed or moving obsta-
cles. Once the navigation and control strategy of the
robot swarm is well-defined, devising a search strat-
egy for gas sources becomes crucial.
Therefore, gradient descent, a prominent opti-
mization algorithm in neural networks, will maximize
the gas concentration the mobile sensors obtain. The
robots will move towards increasing gas concentra-
tion until they reach the source. In (Mustapha et al.,
2020), a Gradient-Based Optimization was used, but
in the previous work, various variations of gradient
descent, such as Nesterov accelerated gradient and
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
658
different asynchronous optimization algorithms, were
compared. The study demonstrated that Stochas-
tic Gradient Descent (SGD) generally converges to a
minimum but may exhibit significantly longer conver-
gence times than other optimizers. Additionally, SGD
relies on robust initialization and may become trapped
at saddle points instead of local minima.
In this context, estimating the gas concentration
gradient around each robot will be accomplished us-
ing a local linear model. This methodology draws
inspiration from computer graphics, specifically vol-
ume rendering on unstructured meshes. In (Correa
et al., 2011) employed weighted linear regression to
estimate normal surface vectors of three-dimensional
surfaces, enhancing computational object rendering.
In (Mancinelli et al., 2018) proposed alternative gra-
dient estimation techniques on triangular meshes us-
ing an iterative gradient-based algorithm, producing
more accurate parameter estimates than stochastic
gradient (SG) algorithms based on auxiliary models.
In this study, a simplified and efficient gas search
strategy employing regression is proposed.
The adoption of linear regression to estimate the
gradient primarily stems from the nature of field sam-
pling. Traditional techniques for gradient calcula-
tion typically employ ordered sampling with fixed and
predefined distances. In the context of this study, field
sampling is less ordered, with distances dependent on
the movement of the robot swarm within the environ-
ment. Thus, linear regression is justified to overcome
this characteristic of sampling.
3 COLLECTIVE OLFACTION OF
ROBOT SWARM
The study was conducted within the framework of
Robot Operating System ROS, in conjunction with
the Gas Dispersion Simulator for Mobile Robot Ol-
faction in Realistic Environments (GADEN) package,
developed by the Machine Perception and Intelligent
Robotics research group (MAPIR), aiming to achieve
realistic simulation of gas dispersion in the environ-
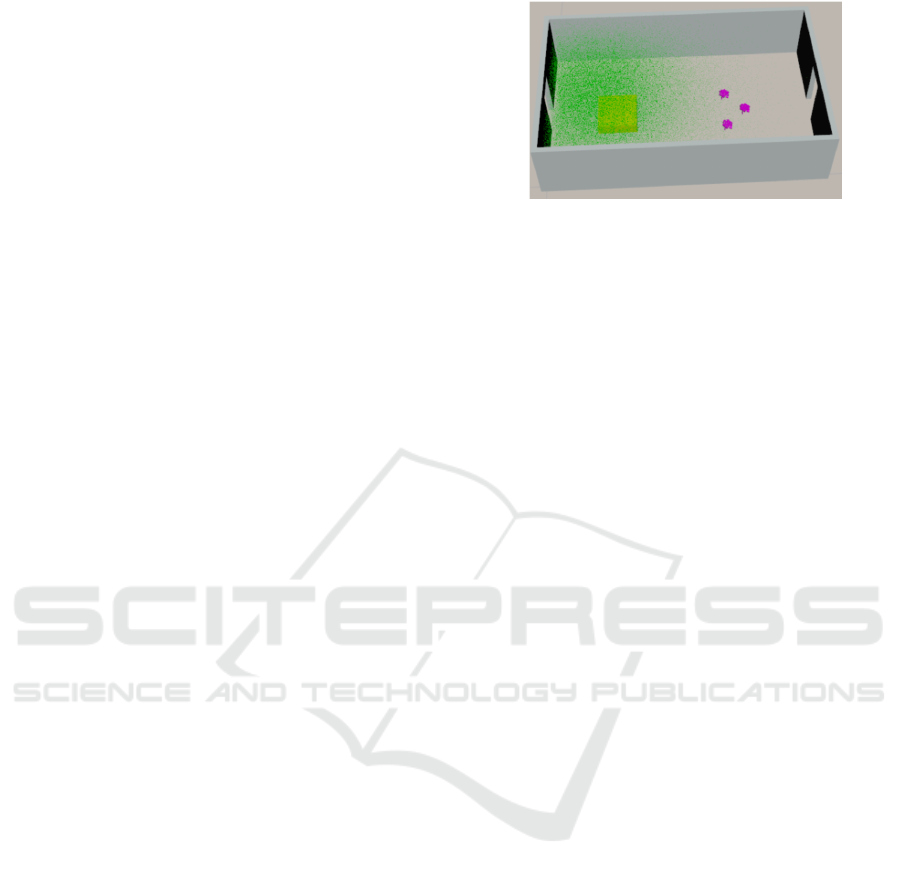
ment (Monroy et al., 2017). The simulation environ-
ment is depicted in Figure 2, where the virtual robots
integrated with gas sensor are represented in purple,
the simulation environment in gray, the gas source in
yellow, and the gas particles in green, providing a vi-
sual representation of the simulated scenario.
The ROS is a set of open development tools and
libraries to facilitate easier software reuse in the con-
text of robotics. The smallest software unit within a
ROS-based system is called a node. Each node per-
forms a small set of functions, and therefore, to con-
Figure 2: Simulation environment.
struct a complex system within this context, it is rec-
ommended to divide the solution into different nodes,
with each node implementing a portion of the solu-
tion.
Nodes communicate with each other through top-
ics, allowing sharing and receiving of information
within the system using the publish/subscribe model.
Each topic is associated with a specific message type:
velocity commands, actual values, vectors, and Iner-
tial Measurement Unit (IMU) data. Users can also
define new message types. A group of nodes can
be organized into packages. Each package contains
the source code for its nodes, configuration files, and
node initialization files. This characteristic allows for
modifying node configuration parameters without al-
tering the nodes’ source code. One of the main tools
provided by ROS is RVIZ, which enables visualiza-
tion of the critical information exchanged between
ROS topics. It includes mobile reference systems for
each robot, their positions, gas particles generated by
GADEN, IMU data, and user-defined data through
Markers.
A dedicated package was developed to facilitate
the simulation of robots equipped with virtual sen-
sors. This package seamlessly integrates the mobile
robot ensemble into the simulation environment pro-
vided by GADEN and RVIZ. The visualization as-
pect is realized by utilizing Markers generated by the
simulation node. The package allows runtime con-
figuration, specifying parameters such as the number
of robots, the three-dimensional file employed for vi-
sual representation, and the alert and collision radio.
The flexibility of these parameters empowers users
to modify them as required, leveraging the intrinsic
adaptability of the ROS infrastructure.
Simulated sensors are instrumental in capturing
the gas concentration dynamics within the environ-
ment, and GADEN serves as the underlying frame-
work for this functionality. Specifically, the MOX
TGS2620 model was chosen for simulating the gas
sensors. Ethanol was selected as the gas of interest,
with operating conditions set at a pressure of 1 ATM
and a temperature of 298 K. The absence of solid air
A Linear Regression Based-Approach to Collective Gas Source Localization
659

currents ensures that diffusion mechanisms predomi-
nantly govern the gas dispersion.
The collective behavior of the robot swarm is or-
chestrated through a combination of gradient descent
and potential field strategies. Gradient descent al-
lows the robots to navigate toward regions of increas-
ing gas concentration, facilitating source localization.
Concurrently, the potential field approach aids col-
lision avoidance by considering dynamic obstacles
(robots) and fixed obstacles (walls) within the envi-
ronment. Gradient calculations rely on estimating lo-
cal gas concentration functions using a planar approx-
imation. This localized model furnishes the necessary
information for effective navigation within the envi-
ronment.
4 OVERVIEW OF PROPOSED
APPROACH
The software or nodes integrated by ROS have spe-
cialized functions. This work has visualization and
simulation nodes, a control node, and a node for lin-
ear regression and gas source detection. Each node is
organized into packages containing the executable’s
source code and initialization and configuration files.
The data is shared by all the robots, a central con-
troller obtains all the data, does the processing and
sends each robot its respective speeds at each step.
In this context, the visualization and simulation pack-
age will receive these speeds, simulate the behavior
of each robot and return the final position of the robot
group. Visualization is performed using the RVIZ
tool. In the context of real robots, the communica-
tion between the central controller and each robot is
a crucial point for the good performance of the strat-
egy. The simulation environment is structured to rep-
resent essential conditions related to the dynamics of
the robots, such as the speed and acceleration limiter
implementation.
In addition to these functionalities, the color of the
robot in RVIZ is determined according to the distance
between robots. It is set as green for robots within a
safety distance (d2), yellow for an alert distance (d1),
and red to represent collisions, as depicted in Figure
3. These distances can be configured during node ini-
tialization.
4.1 Swarm Control
The control of the robot swarm is performed through
the methodology of the potential field. The block di-
agram in Figure 4 represents this system’s topology
considering the input, process, and output variables.
Figure 3: Visualization package.
Figure 4: Block diagram of the controller.
The field estimator calculates the components of
the potential field at the position of the robot of in-
terestThe attraction field is defined by Equation 1, the
repulsion field between robots is defined by Equations
2.
In this manner, the resulting field will enable mu-
tual repulsion between each pair of robots while si-
multaneously guiding them toward the desired goal
point. The goal point serves as one of the inputs to the
controller, allowing navigation to any desired point
within the environment. This comprehensive system
enables the robots to search for the gas source safely
and collision-free.
The set of equations 1 models the attraction field
of the robots towards the goal. Here, α represents the
angle between the robot’s and the goal positions, and
d represents the distance. The remaining constants r,
s, and beta are parameters used to adjust the robot’s
radius, attraction radius, and field attraction constant,
respectively. These values were set to 0.20 m, 0.50 m,
and 2 m, respectively.
if d < r: (1)
FG
x
= 0
FG
y
= 0
if d <= s + r:
FG
x
= beta ∗ (d − r) ∗ cos(α)
FG
y
= beta ∗ (d − r) ∗ sin(α)
if d > s + r:
FG
x
= beta ∗ s ∗ cos(α)
FG
y
= beta ∗ s ∗ sin(α)
Analogously, the repulsion field between robot i
and robot j is given by the set of equations 2. Here,
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
660
α
i, j
represents the angle, and d
i, j
represents the dis-
tance between robots i and j. The remaining constants
r, s, and β are parameters used to adjust the robot’s
radius, repulsion radius, and field repulsion constant,
respectively. It was also used to the repulsion field
between robot and the wall.
i f d < r: (2)
Fx
i, j
= 0
Fy
i, j
= 0
i f d <= s + r:
Fx
i, j
= −beta ∗ (s + r − d
i, j
) ∗ cos(α
i, j
)
Fy
i, j
= −beta ∗ (s + r − d
i, j
) ∗ sin(α
i, j
)
i f d > s + r:
Fx
i, j
= 0
Fy
i, j
= 0
Finally, the equations 3 give the vector field’s
components.
u
i
= FG
x
+
∑
j
Fx
i, j
+ FPx
i
v
i
= FG
y
+
∑
j
Fy
i, j
+ FPy
i
(3)
The vector projection represented in Figure 5 is
given by Equation 4. The projection is performed
onto the velocity command vector in blue, in the di-
rection parallel to the robot represented by the axis x
in red in Figure 5.
Figure 5: Vector projection of the velocity vector.
The angular velocity value is calculated by a pro-
portional controller described by the equation 5.
V
i
=
q
u
2
i
+ v
2
i
∗ cos(arctan 2(u
i
,v
i
) − θ
i
) (4)
ω
i
= k
θ
∗ (arctan 2(u
i
,v
i
) − θ
i
) (5)
4.2 Estimation of Gas Source
The gas source localization algorithm is based on a lo-
cal approximation approach, which involves approxi-
mating the gas distribution function by a linear func-
tion in the vicinity of each robot within the swarm.
By utilizing this method, the gradient of the linear ap-
proximation can be effectively employed to facilitate
the implementation of a gradient descent algorithm.
At each algorithm stage, the linear regression process
is performed for each robot and the concentration gra-
dient is calculated. With the gradient, the objective
position of each robot is updated, taking each one of
them to a position of higher gas concentration. In this
way, the swarm will navigate toward the highest gas
concentration in search of the source.
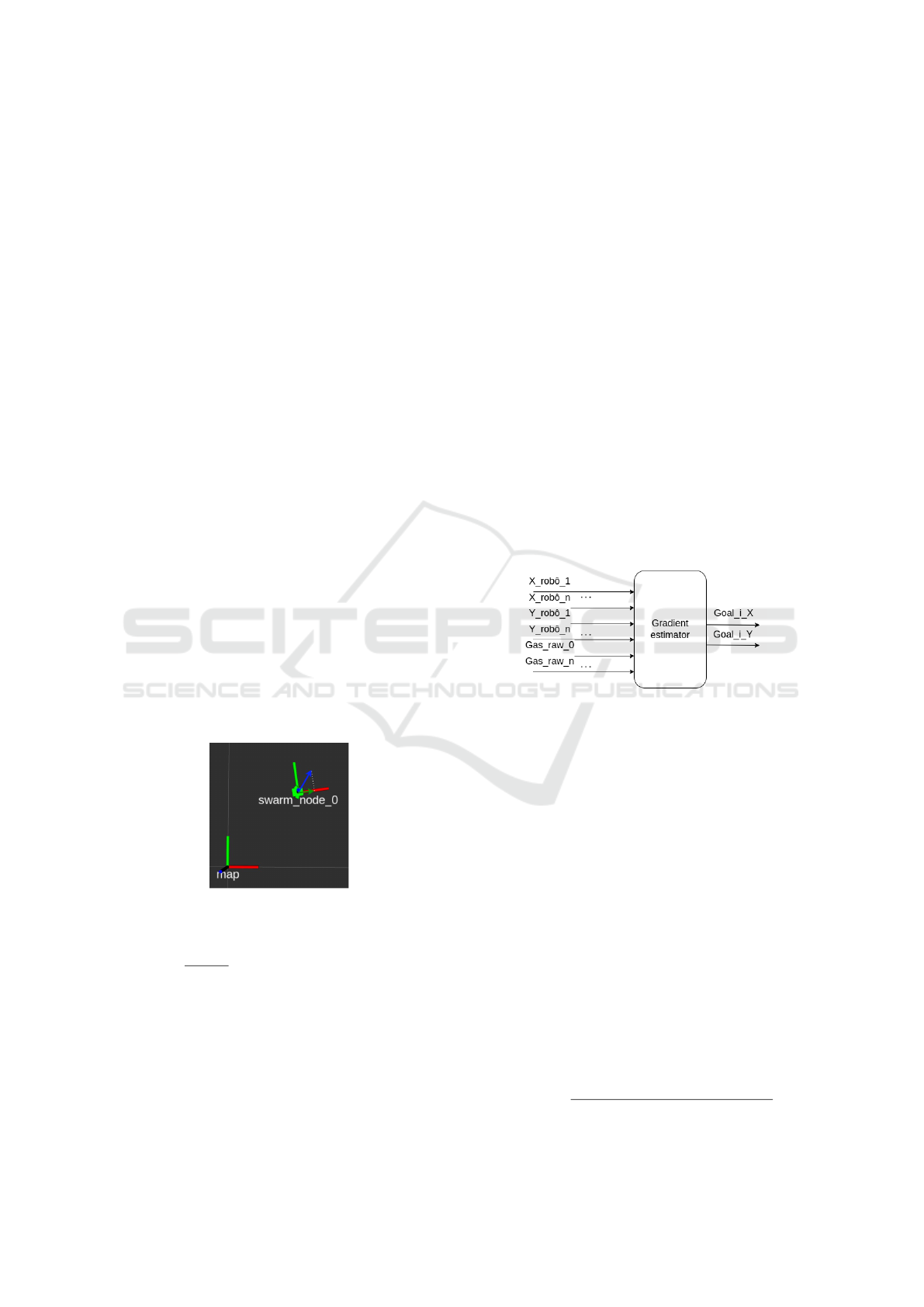
As a critical component of the system, the gas
source locator considers the positions of individual
robots and the corresponding gas concentration mea-
surements obtained by each robot. All measures are
saved in the estimator’s memory so that all samples
obtained are considered in the regression. These cru-
cial inputs enable the gas source locator to effectively
estimate the location of the gas source within the envi-
ronment. The entire process is illustrated in Figure 6,
visually representing the algorithm’s functioning and
integration with the robot swarm.
Figure 6: Block diagram of the gas source locator.
Each element of the robot swarm performs a lin-
ear regression around itself using the information col-
lected by the entire swarm. The regression locally
approximates the gas concentration according to the
model described by Equation 6.
B +
x
1
y
1
t
1
x
2
y
2
t
2
... ... ...
x
n
y
n
t
n
∇F =
GasRaw
1
GasRaw
2
...
GasRaw
n
(6)
The local model requires a different regression
with varying weights and is employed for each robot.
The regression weights are calculated according to
Equation 7, where d
i j
represents the Euclidean dis-
tance in three-dimensional space R
3
described by
Equation 8. The addition of the constant c in Equation
7 was used to eliminating the singularity that occurs
when d
i j
= 0.
W
i j
= 1/(c + d
2
i j
) (7)
D
i j
=
q
(x
i
− x
j
)
2
+ (y
i
− y
j
)
2
+ (t
i
− t
j
)
2
(8)
A Linear Regression Based-Approach to Collective Gas Source Localization
661

The weights were based on the works of, (Comber
et al., 2023), and (Correa et al., 2011). Following this
strategy, field samples collected more distant from the
robot position i and older samples will have a smaller
weight W
i j
in the regression, allowing to represent the
gas concentrations locally so that the gradient descent
strategy can be executed.
5 EVALUATION
The contributions of this work were individually ex-
perimented with to achieve control through linear re-
gression and potential fields. Thus, initially, the vi-
sualization and simulation modules were tested. Sub-
sequently, integrating these modules allowed the au-
tonomous control of the swarm to be implemented in
a gas source search algorithm.
The visualization module of the experiment con-
sists of commanding a group of robots to move from
one point to another in space and verifying if the ac-
tivation of the weight components aligns with the pa-
rameterized values. In this experiment, the robots
were commanded and positioned to observe the dy-
namic behavior of the simulation system.
Another feature implemented in the visualization
package is the limitation of acceleration and veloc-
ity. The velocity limitation experiment involves com-
manding a robot to move forward at a velocity of 100
m/s and observing the behavior of the velocity lim-
iters. The simulation package should not have un-
limited accelerations and velocities like a real robot.
Figure 7 shows a robot’s velocity and position graph
on the axis x using a velocity limitation of 1.5 m/s
and an acceleration of 1 m/s². Thus, the velocity in-
creases linearly due to the acceleration limitation until
it reaches the speed limit, as expected in the case of
robots in a real environment.
Figure 7: Speed Limitation and Acceleration Experiment.
In this experiment, it was possible to validate the
behavior of the velocity limiters and ensure that the
behavior of the swarm in subsequent experiments will
be closer to that encountered in real robots.
5.1 Collective Behavior
This experiment involves controlling ten robots to a
common target point to validate the control system.
The experiments’ evolution, as the system’s scal-
ability was increased to observe possible variations
in the system’s behavior, the position of the swarm
throughout the experiment, and the potential field as-
sociated with the swarm’s initial position are illus-
trated by Figure 8.
Figure 8: Initial and final positions of the experiment with
fifty robots. (a) Robots. (b) Repulsion potential field.
Thus, a swarm of 50 robots was positioned with
the coordinates x = 0m and y = 0,2m defined as the
objective. With this experiment, the control system
efficiently coordinated the robot swarms in the se-
lected simulation environment. The above experiment
was also repeated for 18, 20, and 30 robots. In all
cases, the control system achieved coordinated move-
ment of the swarm from the initial configuration to
the final configuration around the target point. In this
experiment, the target or destination point is the same
for the entire swarm to validate the controller in situa-
tions where the swarm had a high likelihood of collid-
ing with each other and making their task more chal-
lenging.
5.2 Linear Regression
In this experiment, the robots were placed in the envi-
ronment with the gas simulation. Figure 9 illustrates
the regression represented by the yellow plane per-
formed by the central robot for gas source localiza-
tion.
The blue spheres represent the data collected by
the robots and their size is proportional to the weight
of each sample in the regression. It is noticed that the
points farthest from the robot are smaller and, there-
fore, have less weight in the regression. In this way,
the robots can make a local estimate of gas concentra-
tions and go down the gradient until the stop condition
is met, which occurs when at least one sensor returns
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
662
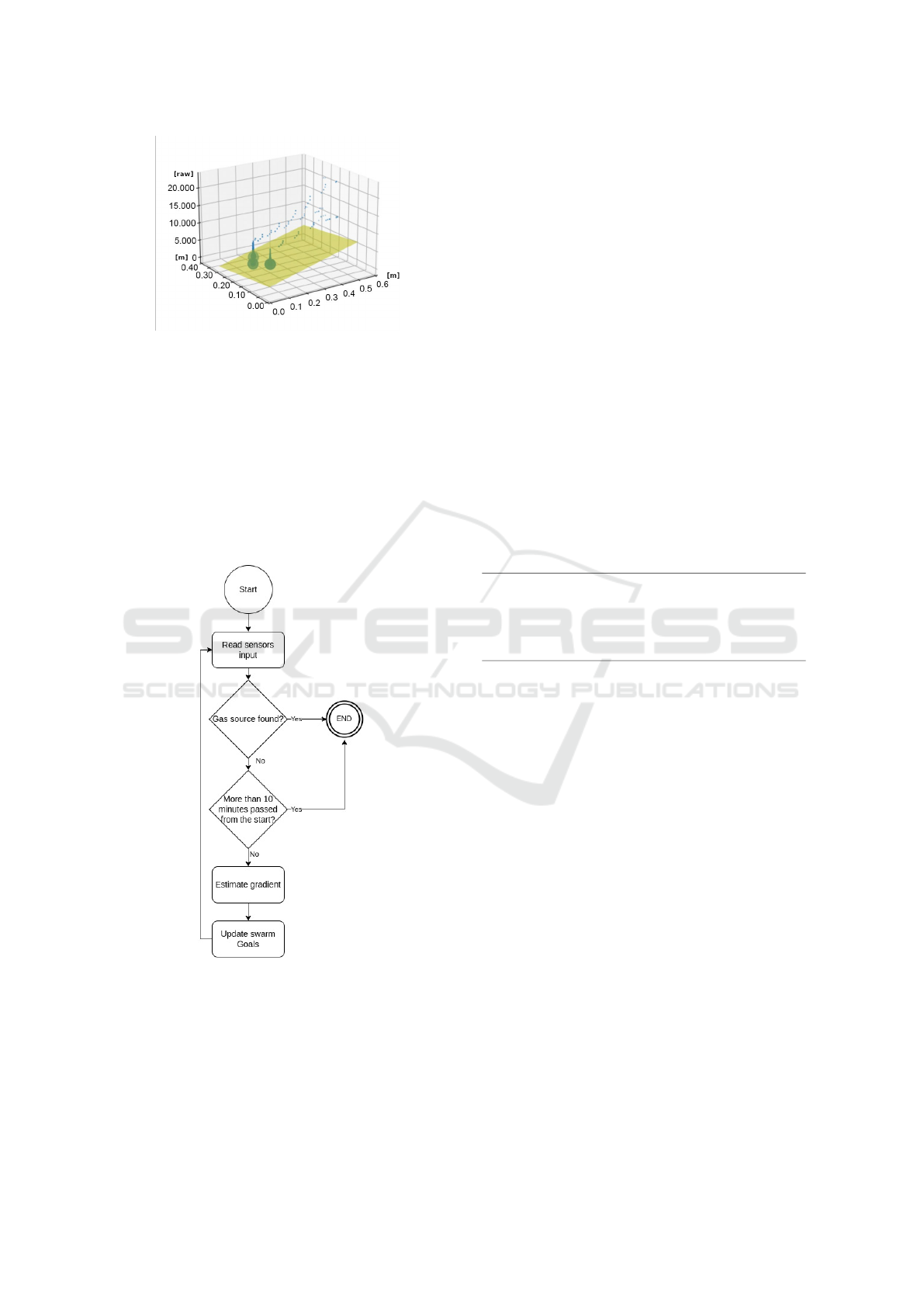
Figure 9: Gas search experiment.
a value less than 2000, indicating high gas concen-
tration, or after 10 minutes from the beginning of the
experiment.
The return of the sensor of 20000 is considered
low gas concentration, and 2000 indicates that the
sensor is very close to the source. The concentration
values returned by the sensor are dimensionless and
correspond to the RS/R0 ratio, where RS is the mea-
sured sensor resistance and R0 is the outdoor air re-
sistance. Figure 10 presents the general flowchart of
the experiment.
Figure 10: Gas search flowchart.
This experiment was repeated with 1 and 2 robots,
which could not find the gas source within the 10-
minute time limit. This behavior can be explained by
analyzing the regression in Figure 10. In this case, the
plane around the robots is well-defined since we have
a sampling of around three robots. In cases with only
1 or 2 robots, the plane cannot be satisfactorily esti-
mated due to the difficulty of defining a plane with
at most three sampling points. Although this diffi-
culty is overcome using the previous samples stored
in the robots’ memories, the experiment using fewer
than three robots did not converge to the source within
the defined 10-minute time limit.
5.3 Gas Source Search
In this experiment, the gas source search algorithm
was tested with different variations in swarm scala-
bility to obtain a performance comparison of the al-
gorithm using different numbers of robots. Initially,
the robots were positioned at random coordinates in
the environment. Subsequently, the gas source search
strategy was initiated. The system remained in op-
eration until one of the sensors returned a value be-
low 2000, corresponding to a high gas concentration.
The experiment was repeated ten times for each fixed
number of robots. Table 1 contains the average values
of the obtained results.
Table 1: Results of gas search experiments.
Robots ∆ Σ Ideal X Real (%) Global/robot (m) Error abs.(m)
3 1,24% 0,0047 0,086
6 5,86% 0,0141 0,090
12 2,63% 0,0068 0,118
18 6,55% 0,0197 0,139
24 7,95% 0,0220 0,143
30 9,73% 0,0258 0,139
It can be noticed in the first column that the ra-
tio between the actual length of the path taken by the
robots and the ideal path, the path the robots would
take if they were moving directly towards the gas
source, was above 6% in the cases of 18, 24, and 30
robots, and below 6% in the others. The average dis-
placement per robot shown in the second column is
also higher in cases 18, 24, and 30. Thus, an increase
in the algorithm’s efficiency can be observed for the
values of 3 and 12 robots, where the swarm cov-
ered a shorter distance than the distance they would
have traveled to the final configuration if the move-
ment were done in a straight line. The second column
shows a decrease in the system’s efficiency with the
increased number of robots. In the experiment with
18 robots, saturation in the system starts to occur, and
there are more robots than the environment can ac-
commodate. At this point, having more robots only
hindered the system’s performance. This observation
is also reinforced by the increase in the system’s ab-
solute error in estimating the gas source’s position.
A Linear Regression Based-Approach to Collective Gas Source Localization
663

6 CONCLUSIONS
Gas leaks are a significant problem in homes and in-
dustrial environments. The main objective of the pre-
sented work was to develop a strategy to locate gas
leak sources using swarms of robots. The solution
presented in this work was divided into three com-
ponents: swarm simulation, swarm control, and the
gas source search algorithm. These components can
be utilized in other contexts, particularly in simu-
lated ROS and RVIZ environments, opening up fur-
ther applications and research possibilities. Through
the conducted experiments, the simulation and con-
trol strategies for robot swarms were validated. Con-
trolling up to 50 robots in a simulated environment
without collisions was possible. The gas source ex-
ploration strategy’s efficacy exhibited disparate effi-
ciency levels contingent upon the variability in sys-
tem scalability. The swarm trajectory closely fol-
lowed a straight line toward the source, deviating by
only 1.24% from the optimal trajectory (a straight
line) when using only three robots. Therefore, de-
ploying three robots is sufficient for gas source de-
tection for the given environment size. However, in
larger environments, employing more robots may im-
prove search efficiency. An important finding from
the search experiment is that using three sensors for
gas sampling provides accurate gradient estimation,
enabling an efficient gas source search. An alterna-
tive strategy worth exploring is using multiple sensors
attached to a single robot, achieving a similar approxi-
mation with only three gas samples without relying on
swarm coordination. Overall, the developed strategy
and software packages demonstrated their effective-
ness in successfully simulating and controlling robot
swarms and detecting gas leakage sources. Thus, the
results of this work will allow applications in different
contexts and encourage new research in related areas.
ACKNOWLEDGEMENTS
The project is supported by National Council for
Scientific and Technological Development – CNPq
(process CNPq 407984/2022-4); Fund for Scientific
and Technological Development – FNDCT; Ministry
of Science, Technology and Innovations – MCTI of
Brazil; Araucaria Foundation; and the General Super-
intendence of Science, Technology and Higher Edu-
cation (SETI).
REFERENCES
Bouras, A., Gutierrez-Galvez, A., Burgu
´
es, J., Bouzid, Y.,
Pardo, A., Guiatni, M., and Marco, S. (2023). Con-
centration map reconstruction for gas source location
using nano quadcopters: Metal oxide semiconductor
sensor implementation and indoor experiments vali-
dation. Measurement, 213:112638.
Comber, A., Brunsdon, C., Charlton, M., Dong, G., Har-
ris, R., Lu, B., L
¨
u, Y., Murakami, D., Nakaya, T.,
Wang, Y., and Harris, P. (2023). A route map for
successful applications of geographically weighted re-
gression. Geogr Anal, 55(1):155–178.
Correa, C. D., Hero, R., and Ma, K.-L. (2011). A compar-
ison of gradient estimation methods for volume ren-
dering on unstructured meshes. IEEE Transactions
on Visualization and Computer Graphics, 17(3):305–
319.
He, Y., Cheng, L., Pan, Y., Li, Y., Wang, D., and Zheng,
H. (2023). Multi-sensory olfactory quadruped robot
for odor source localization*. In 2022 IEEE Inter-
national Conference on Cyborg and Bionic Systems
(CBS), pages 332–335.
Mancinelli, C., Livesu, M., and Puppo, E. (2018). Gradient
field estimation on triangle meshes. In STAG, pages
87–96.
Monroy, J., Hernandez-Bennetts, V., Fan, H., Lilienthal, A.,
and Gonzalez-Jimenez, J. (2017). Gaden: A 3d gas
dispersion simulator for mobile robot olfaction in re-
alistic environments. Sensors, 17(7).
Mustapha, A., Mohamed, L., and Ali, K. (2020). An
overview of gradient descent algorithm optimization
in machine learning: Application in the ophthalmol-
ogy field. In Hamlich, M., Bellatreche, L., Mondal,
A., and Ordonez, C., editors, Smart Applications and
Data Analysis, pages 349–359, Cham. Springer Inter-
national Publishing.
Rohrich, R. F., Teixeira, M. A. S., Lima, J., and De Oliveira,
A. S. (2021). Collective gas sensing in a cyber-
physical system. IEEE Sensors Journal, pages 1–1.
Schranz, M., Di Caro, G. A., Schmickl, T., Elmenreich,
W., Arvin, F., S¸ekercio
˘
glu, A., and Sende, M. (2021).
Swarm intelligence and cyber-physical systems: Con-
cepts, challenges and future trends. Swarm and Evo-
lutionary Computation, 60:100762.
Wu, Q., Chen, Z., Wang, L., Lin, H., Jiang, Z., Li, S., and
Chen, D. (2020). Real-time dynamic path planning of
mobile robots: A novel hybrid heuristic optimization
algorithm. Sensors, 20(1).
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
664
