
Zeroth-Order Optimization Attacks on Deep Reinforcement
Learning-Based Lane Changing Algorithms for Autonomous Vehicles
Dayu Zhang
1
, Nasser Lashgarian Azad
1
, Sebastian Fischmeister
2
and Stefan Marksteiner
3
1
Systems Design Engineering, University of Waterloo, 200 University Ave. W, Waterloo, Ontario, Canada
2
Electrical and Computer Engineering, University of Waterloo, 200 University Ave. W, Waterloo, Ontario, Canada
3
AVL List GmbH. Hans-List-Platz 1, 8020 Graz, Austria
fi
Keywords:
Deep Reinforcement Learning, Adversarial Training, Zeroth-Order Optimization, Autonomous Vehicles.
Abstract:
As Autonomous Vehicles (AVs) become prevalent, their reinforcement learning-based decision-making algo-
rithms, especially those governing highway lane changes, are potentially vulnerable to adversarial attacks.
This study investigates the vulnerability of Deep Q-Network (DQN) and Deep Deterministic Policy Gradient
(DDPG) reinforcement learning algorithms to black-box attacks. We utilize zeroth-order optimization meth-
ods like ZO-SignSGD, allowing effective attacks without gradient information, revealing vulnerabilities in
the existing systems. Our results demonstrate that these attacks can significantly degrade the performance of
the AV, reducing their rewards by 60 percent and more. We also explore adversarial training as a defensive
measure, which enhances the robustness of the DRL algorithms but at the expense of overall performance.
Our findings underline the necessity of developing robust and secure reinforcement learning algorithms for
AVs, urging further research into comprehensive defense strategies. The work is the first to apply zeroth-order
optimization attacks on reinforcement learning in AVs, highlighting the imperative for balancing robustness
and accuracy in AV algorithms.
1 INTRODUCTION
The escalating pace of Autonomous Vehicle (AV)
development and deployment emphasizes the urgent
need for secure and robust decision-making algo-
rithms. However, these algorithms, often promised
to be based on Deep Reinforcement Learning (DRL),
present a potential vulnerability that adversarial at-
tacks could exploit.
Since the discovery of adversarial examples in
2013, adversarial attacks and defenses have been
well-studied in the field of deep learning (Szegedy
et al., 2014). These attacks introduce minute per-
turbations, compelling machine learning algorithms
to produce erroneous or attacker-desired predictions.
Such perturbations are often imperceptible to both hu-
man observers and conventional detection techniques.
Many attacks and defenses have been demonstrated
on AVs, primarily targeting perception modules, such
as cameras and lidars (Boloor et al., 2020; Cao et al.,
2019). However, adversarial attacks and defenses
still leave a significant gap in the field of DRL, espe-
cially in the application of DRL in AVs, where DRL
shows its promise as the future of control. Notably,
black-box attacks represent a significant threat due
to their capacity to manipulate system output with-
out the attacker having deep knowledge of the sys-
tem’s inner workings, in this case, the gradient in-
formation of the underlying model. As AVs increas-
ingly share our roads, understanding the vulnerability
of DRL-based lane-changing algorithms to such at-
tacks becomes crucial for ensuring the safety, trust,
and widespread acceptance of these emerging tech-
nologies.
In this study, we comprehensively examine the
vulnerability of highway lane-changing algorithms —
a critical and the most fundamental component of
AV systems — to black-box attacks. Our focus is
on the widely implemented DRL policies: Deep Q-
Network (DQN) and Deep Deterministic Policy Gra-
dient (DDPG), representing discrete and continuous
action spaces, respectively (Mnih et al., 2013)(Lilli-
crap et al., 2019). Leveraging zeroth-order optimiza-
tion methods, often applied in deep learning — such
as ZO-SignSGD — we demonstrate their utility in ex-
ecuting black box attacks on DRL agents, uniquely,
without the need for gradient information (Liu et al.,
2019). Such an idea is plausible if the attacker ac-
Zhang, D., Azad, N., Fischmeister, S. and Marksteiner, S.
Zeroth-Order Optimization Attacks on Deep Reinforcement Learning-Based Lane Changing Algorithms for Autonomous Vehicles.
DOI: 10.5220/0012187700003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 665-673
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
665

cesses vehicle sensor values. However, to maximize
the damage without getting detected, the attack must
produce a perturbation small enough to avoid detec-
tion yet can still wreak havoc. Our experiments re-
veal that these techniques can effectively undermine
the decision-making processes of AVs, highlighting a
significant vulnerability in current systems. Further,
we investigate the efficacy of adversarial training as
a mitigation strategy within the context of DRL, pro-
viding insights into its potential to enhance the robust-
ness of lane-changing algorithms against adversarial
attacks. Our research underscores the importance of
considering security in developing and deploying re-
inforcement learning algorithms in AV.
As a result, the contributions of this paper are as
follows:
• The first paper to highlight and apply zeroth-order
optimization attacks on DRL in general and the
first use of such attacks in the context of AVs.
• A demonstration of the effect of targeted adver-
sarial attacks and how they can force agents into
a specific action leading to hazardous conditions
and collisions. We show that such attacks con-
verge in surprisingly short time with minimal per-
turbation.
• Results on hardening DRL through perturbation
training providing guidance to future work against
zeroth-order optimization attacks.
The remainder of the paper is structured as fol-
lows: Section 2 outlines the related work. Section 3
provides the problem definition and describes the en-
vironment. Section 4 explains the DRL policies used
in this work. Section 5 highlights the attack model
and the new zeroth order optimization attack. Sec-
tion 6 outlines our approach and discusses the results.
Finally, Section 7 draws conclusions from the work
and describes future initiatives.
2 RELATED WORK
As Reinforcement Learning (RL) continues to prove
its potency in complex decision-making tasks, there
has been a surge in academic interest in exploring its
intersection with Adversarial Machine Learning and
vulnerabilities to such attacks.
2.1 Reinforcement Learning
RL is a machine learning algorithm where an agent
learns to interact with an environment to maximize
the reward. Given a state, the agent produces an ac-
tion, and based on this action, the environment pro-
vides a corresponding reward. The agent then updates
its policy based on the reward. The agent is trained by
interacting with the environment for several episodes.
Along with the development of deep learning,
DRL has been shown to be effective in several ap-
plications such as Atari games (Mnih et al., 2013),
robotics (Kalashnikov et al., 2021; Chebotar et al.,
2021), and AVs (Isele et al., 2018; Mnih et al., 2015).
DQN, one of the first DRL algorithms, demonstrated
its potential by outperforming humans in Atari games
(Mnih et al., 2013). It employs a neural network to ap-
proximate the Q function, representing the expected
reward for taking an action in a given state. Cru-
cial to DQN’s operation is experience replay, which
de-correlates the training data and the target network,
which stabilizes the training process. On the other
hand, DDPG, an actor-critic algorithm, effectively
manages continuous action spaces (Lillicrap et al.,
2019). Like DQN, it employs a neural network to
approximate the Q function and the policy. How-
ever, it distinguishes itself through the use of a re-
play buffer for de-correlating training data, the target
network for training stabilization, and its proficiency
in solving numerous continuous control tasks in the
OpenAI Gym (Brockman et al., 2016).
2.2 Adversarial Machine Learning
Adversarial machine learning was first introduced by
Szegedy et al. in 2013 (Szegedy et al., 2014), where
it was used to craft specific adversarial examples.
Adversarial examples are input data manipulated to
cause a machine learning model to misclassify it.
While the perturbations are usually indiscernible to
the human eye, they lead the model to drastically in-
correct outputs. The discovery of adversarial exam-
ples highlighted the vulnerability of machine learn-
ing models, even when they achieve high accuracy on
test data. Since its discovery, attack and defense have
been popular topics in machine learning. Notable at-
tacks on deep neural networks include the Fast Gradi-
ent Sign Method (FGSM) (Goodfellow et al., 2015),
the DeepFool (Moosavi-Dezfooli et al., 2016), and
the Carlini and Wagner attack (Carlini and Wagner,
2017). Defenses include adversarial training (Car-
lini and Wagner, 2017), adversarial examples detec-
tion (Papernot et al., 2016), and adversarial robustness
certification (Sinha et al., 2020). Though these meth-
ods have been only shown to be effective in machine
learning, it is clear that the same techniques can be
applied to the field of reinforcement learning. Small
perturbations in the observation can lead to an unde-
sired action, significantly affecting the agent’s perfor-
mance. In 2017, Huang et al. showed that the DQN
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
666

agent is vulnerable to the same attack applied to neu-
ral networks, such as the FGSM attack (Huang et al.,
2017). Similar defenses, such as adversarial training,
are also shown to be effective in the field of rein-
forcement learning (Pattanaik et al., 2017). Lately,
more research has been done to increase the robust-
ness of reinforcement learning agents in the context
of AV (He et al., 2023; Buddareddygari et al., 2022).
2.3 Black-Box Attacks
The exploration of adversarial attacks has, for the
most part, been rooted in first-order optimization
methods. These methods, while powerful, often
necessitate the availability of gradient information,
making them impractical for real-world scenarios
where such information may not always be acces-
sible. The quest for gradient-free alternatives pre-
dates the recent strides in deep learning and adver-
sarial machine learning. Traditional methods such as
COBYLA and various Bayesian optimization tech-
niques have been investigated extensively. How-
ever, these methods have demonstrated scalability
limitations in dealing with modern, complex models
that exhibit an ever-increasing dimensionality (Pow-
ell, 1994; Shahriari et al., 2016).
Zeroth-order (ZO) optimization methods have
emerged as a promising alternative, offering effi-
ciency in computational resources while maintaining
a competitive convergence rate (Liu et al., 2020). A
surge of interest in recent years has led to the devel-
opment of several ZO optimization techniques, in-
cluding but not limited to Zeroth Order Stochastic
Gradient Descent (ZOSGD), ZO-SignSGD, and ZO-
ADMM (Liu et al., 2020). The appeal of these tech-
niques lies in their ability to operate without explicit
gradient information, thus bridging the gap between
the theoretical world of optimization and the prag-
matic constraints of real-world applications.
In this paper, we focus mainly on the ZO-
SignSGD method. Unlike other methods that use ex-
act estimated gradient values, ZO-SignSGD utilizes
the sign of the gradient to update the model parame-
ters. This feature provides both computational advan-
tages and practical feasibility, allowing the perturba-
tion to converge in a relatively small amount of itera-
tions (Liu et al., 2019). We venture into an underex-
plored area by employing ZO-SignSGD as a tool to
study adversarial attacks on DRL algorithms in AVs,
potentially expanding the understanding and applica-
tion of black-box attacks in real-world scenarios.
Figure 1: An example render of the highway lane changing
environment.
3 PROBLEM
This paper focuses on applying, attacking, and de-
fending a highway lane-changing deep Q network
(DQN) agent and a Deep Deterministic Policy Gradi-
ent (DDPG) agent. In this paper, we assume that the
vehicle has been compromised without detection, al-
lowing the adversary to access and manipulate sensor
data, thereby altering the states perceived by the DRL
agent. Given the increasing adoption of detection al-
gorithms for common attacks, adversarial machine-
learning strategies are employed to maximize damage
to DRL agents. These strategies introduce minimal
perturbations to maintain stealth and reduce the like-
lihood of detection during the attack. It’s worth not-
ing that this paper does not delve into the specifics of
the vehicle’s attack surface or penetration methods.
To assure the performance of the unattacked agent,
the reinforcement learning algorithms are based on
Stable Baselines 3, an online RL library written in
Python (Raffin et al., 2021). The training environment
is based on the ’highway-env’ library to allow faster
deployment, hyperparameter tuning, and debugging,
as seen in Figure 1 (Leurent, 2018).
3.1 Environment
The environment is a lightweight highway lane-
changing environment compatible with the OpenAI
gym interface (Leurent, 2018). To expedite the train-
ing process, the environment is configured with less
than 30 cars.
The environment’s observation space tracks the
vehicle’s kinematics on the highway. That includes
the position and velocity of the ego vehicle. It also
records the relative position and velocity of other ve-
hicles on the highway. The observation space is nor-
malized relative to the ego vehicle. The position is
normalized with the bound of [−100, 100], and the ve-
locity is normalized with the bound of [0, 20].
During initialization, all vehicles, including the
ego vehicle, are randomly positioned on the highway,
ensuring a minimum separation between them. Vehi-
cles, excluding the ego vehicle, adhere to a randomly
initialized Intelligent Driver Model and the Minimiz-
ing Overall Braking Induced by Lane change (MO-
Zeroth-Order Optimization Attacks on Deep Reinforcement Learning-Based Lane Changing Algorithms for Autonomous Vehicles
667

BIL) model (Leurent, 2018).
For DQN, the environment’s action space is a
high-level discrete action space with five actions. The
actions are defined as:
• Action 1: change lane to the left
• Action 2: idle (do nothing)
• Action 3: change lane to the right
• Action 4: accelerate
• Action 5: decelerate
Simple proportional controllers control the lower-
level actions such as specific heading, velocity, and
acceleration when each action is chosen, so the rein-
forcement learning agent only needs to make a high-
level decision on which action to take.
For DDPG, the action is a continuous action space
for the kinematics of the ego vehicle with a dimension
of 2. The first dimension is the acceleration of the
ego vehicle, and the second dimension is the steering
angle of the ego vehicle. Both actions are normalized
to [−1, 1].
4 POLICIES
The reward function rewards the agent for staying in
the right lane at a faster speed while penalizing the
agent for collision. The reward function is defined as:
R(s, a) =RightLaneReward+
0.4 ·
v − v
min
v
max
− v
min
+ collision
(1)
The collision reward is set to -1. So that the agent will
seek to move faster while avoiding a collision. Right-
LaneReward is set to 0.1 when the agent is traveling
on the right-most lane.
4.1 DQN Policy
The agent is trained with the DQN algorithm (Mnih
et al., 2013). Similar to Q learning, the underlying
structure of the model is Markov Decision Process
Equation 2.
Q
new
(s
t
, a
t
) = Q(s
t
, a
t
)+
α(r
t
+ γ · max
a
Q(s
t+1
, a)−
Q(s
t
, a
t
))
(2)
• Q(s
t
, a
t
): Q value of the current state and action
• α: learning rate
• r
t
: reward of the current state and action
• γ: discount factor
• s: state
• a: action
However, for deep Q learning, the Q function is
approximated by a neural network. The neural net-
work is trained with the DQN algorithm. This algo-
rithm uses a replay buffer to store the experience of
the agent. The replay buffer samples a batch of ex-
periences to train the neural network. The DQN loss
function is defined as:
L(θ) = E
(s,a,r,s
′
)∼U (D)
·
"
r + γ ·max
a
′
Q(s
′
, a
′
;θ
−
) − Q(s, a;θ)
2
#
(3)
• θ: the parameters of the neural network
• θ
−
: the parameters of the target network
• D: the replay buffer
Like Q learning, the network loss is the reward
plus the discounted maximum Q value of the next
state minus the current Q value. But in this case,
the gradient descent method minimizes the loss func-
tion. The network is trained with the Adam opti-
mizer (Kingma and Ba, 2017). For a more straight-
forward implementation, Stable Baseline 3 is used to
train the model (Raffin et al., 2021).
4.2 DDPG Policy
The agent is trained with the stable baseline library
implementation of the DDPG algorithm (Lillicrap
et al., 2019; Raffin et al., 2021). In contrast to DQN,
which only deals with discrete action spaces, DDPG
allows the handling of continuous action spaces, mak-
ing it particularly suitable for AV, where actions are
often continuous, like acceleration and steering an-
gle. Another main difference is that DDPG combines
the actor-critic approach with insights from Deep Q-
Networks (DQN). The actor in this setup is responsi-
ble for determining the best action given the current
state, while the critic evaluates the chosen action’s
quality. As seen in Equation 4, the actor updates in
the direction that maximizes the Q value of the cur-
rent state and action. On the other hand, the critic is
updated based on the Temporal Difference (TD) er-
ror, which is the difference between the critic’s cur-
rent estimate of the Q-value and the improved esti-
mate yielded by the latest action from the actor. This
process, similar to Q-learning, involves the use of a
learning rate to balance the weight between the old
and new estimates:
∇
θ
µ
J ≈
∑
i
∇
a
Q(s, a|θ
Q
)|s = s
i
, a = µ(s
i
)∇θ
µ
µ(s|θ
µ
)|
s
i
N
(4)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
668

5 ZEROTH ORDER ATTACK
This work uses the zeroth order optimization as an
adversarial attack.
5.1 Attacker Model
The attacker model defines the attacker’s opportunity,
intent, and capability to place the work in context.
The attacker has the opportunity to influence the sys-
tem during operation at the level of sensor outputs.
The attacker’s short-term goal is to disrupt the agent
to the point that the agent will cause a collision on
the road. The capabilities of the attacker consist of
the following: (1) the attacker can influence a sensor
value up to a 10% deviation of its actual value, (2)
an attacker can influence sensor values immediately
(i.e., from the start of the vehicle until a shutdown),
continuously (i.e., no cool down periods), and indefi-
nitely (i.e., for as long as the attacker wants), and (3)
the attacker can influence any sensor, and all sensors
at the same time (i.e., there no assumption that any
single sensor in the set provides an actual value).
5.2 Zeroth Order SignSGD
The ZO-SignSGD method is a gradient-free (zeroth
order) optimization method that uses the sign of the
gradient to update the model (Liu et al., 2019).
The ZO-SignSGD method implemented is defined
as:
Algorithm 1 shows the implementation of the ZO-
SignSGD attack for lane changing. The input vari-
ables, such as learning rate, initial value, and num-
ber of iterations, are tweaked to ensure a fast conver-
gence while minimizing the perturbation size. As a
black box optimization algorithm, the first step is to
estimate the gradient. A gradient of a function can
be estimated by adding a small perturbation to the in-
put data. For a high-dimension function such as the
neural network used in the DRL, the gradient must
be computed by summing all estimated gradients over
perturbations of random directions. To achieve a fast
convergence of the algorithm, similar to the Fast Gra-
dient Sign Method, only the sign of the gradient is
used. This also avoids the error introduced by the
numerical value of the estimated gradient. The per-
turbation is then calculated by multiplying the sign
of the gradient with the learning rate to minimize the
objective function seen in Equation 8. This process
is repeated until it reaches the maximum number of
iterations. The perturbed observation is then used to
get the action from the policy, thus, continuing into
the next step.
Data: ZO-SignSGD
Input: learning rate {δ
k
} , initial value x
0
,
and number of iterations: T
def GradEstimate(x, µ, q, d):
for k = 1, 2, ..., q do
u = normalized(random number);
ˆ
g
k
=
ˆ
g +
d( f (x+µu)−f (x))
µ
u;
end
def optimization(x):
for k=1, 2, ..., T do
ˆ
g
k
= GradEstimate(x
k
);
x
k+1
= x
k
− δ
k
sign(
ˆ
g
k
);
end
def Main:
for i in range of timesteps do
while not done do
action =
model.predict(observation);
env.step(action);
perturbed obs =
optimization(observation);
observation = perturbed obs;
end
end
Algorithm 1: Implantation of ZO-SignSGD for Lane Keep-
ing. Adversarial observation is calculated for each step.
Using this algorithm, the specific objective for this
attack is crafted with two losses in mind. The first loss
is the distance between the target action and the origi-
nal action, which can be seen in Equation 5. The same
is true for both DQN and DDPG. “a” is the constant
that controls the weight of the loss.
L 1
DQN
= a · norm(Q(x + δ, y
target
;θ)−
Q(x + δ, y; θ))
(5)
L 1
DDPG
=a · norm(action(x + δ;θ)−
action(x;θ))
(6)
The second loss is the distortion caused by the per-
turbation, as seen in Equation 7. This calculates the
distance between the original observation and the per-
turbed observation.
L 2 = norm((perturbed obs − original obs)
2
) (7)
Ob jective : min(L 1 + L 2) (8)
When crafting the perturbation, both losses are
added together to minimize both during the optimiza-
tion. For a successful attack, both losses will converge
and be minimized. Figure 2 shows an example of this
convergence. Since Zeroth Order SignSGD is not a
Zeroth-Order Optimization Attacks on Deep Reinforcement Learning-Based Lane Changing Algorithms for Autonomous Vehicles
669

constrained optimization method, the perturbation is
not guaranteed to be small. At the same time, since it
is a gradient-free stochastic optimization method, the
attack can fail to converge within the given number of
iterations.
6 APPROACH & EVALUATION
6.1 Adversarial Training
As seen in many adversarial machine learning papers,
adversarial training is a method to train a model to
be robust to adversarial attacks (Carlini and Wagner,
2017; Pattanaik et al., 2017). A general Procedure can
be seen in Algorithm 2.
Data: Adversarial-Training
for i = 1, 2, ..., timestep do
attack the observation Q(obs, a, θ);
obs’ = ZO SignSGD(Q(obs, a, θ));
a’ = Q(obs
′
, a, θ);
new obs, reward = env(a’,s);
Train policy as per DQN or DDPG
algorithm;
end
Algorithm 2: Adversarial training of the policy.
The algorithm is based on the methods discussed
in (Pattanaik et al., 2017). Though it may appear sim-
ple, this algorithm has proven successful against the
trained perturbation method for both deep learning
and DRL models.
6.2 Initial Training
The DQN algorithm is first trained for 20,000 time
steps with the default hyperparameter included in sta-
ble baseline 3. The model can learn the environment
and achieve a mean reward of 310.58 per episode.
For most of the episodes, The policy can navigate the
highway for the entire episode without fail.
The DDPG model is trained for 120,000 time
steps. A higher time step allows the actor and critic
to converge on this lane-changing task. Due to the
continuous action space control by the DDPG algo-
rithm, the reward is not as stable as DQN. However,
the model can still achieve a mean reward of 232.78
per episode. Note that DDPG is trained with noise
added to the action space as part of the exploration
strategy.
The maximum reward obtainable by the agents per
episode would be 450, assuming it never crashes, is
0 10 20 30 40 50 60 70 80 90 100
Iteration
0
0.05
0.1
0.15
0.2
0.25
0.3
Losses
Loss1
Loss2
Figure 2: Loss convergence for successful perturbation for
both Loss1 and Loss2.
always on the right-most lane, and always travels at
high speed. However, such theoretical maximum re-
ward is unobtainable as the agent must slow down to
change lanes and avoid crashes. At the same time, As
long as other cars are in the right-most lane, the agent
is unlikely to obtain the full reward for the step. Get-
ting a higher reward also requires the agent to have
a constant heading going forward. This has proven
to be difficult to maintain for a DDPG agent where
the policy has control of the steering. Therefore, both
agents performed relatively well in this task.
6.3 Attacks
The idea of the attack is to mimic a real-world sce-
nario where the attacker has access to the vehicle’s
sensors, enabling them to craft perturbations to the
observation space. The perturbation is generated
at every step with the consideration of perturbation
sizes. The maximum iteration per step for perturba-
tion crafting is set to 100. However, most success-
ful perturbations are created within 50 iterations. An
example of the loss for a successful perturbation is
shown in Figure 2. The perturbation converges under
100 iterations. As the iterations go on, the distortion
becomes the focus of the optimization program and,
as a result, shrinks with iterations. The targeted ac-
tion for the DDPG policy is set to be [1, 0.5], meaning
full throttle and turning right. The attack successfully
causes the model to turn right most of the time, caus-
ing the mean reward per episode to plunge. For DQN,
since the action space is high level, the targeted attack
is chosen to be “accelerate” (Action 3) to prevent the
ego vehicle from changing lanes at all.
The attack is unconstrained with the loss function
defined in Equation 5. However, the size of the pertur-
bation is directly correlated to the parameters for ZO
SignSGD. The larger step each iteration of the gradi-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
670
Figure 3: Result of the perturbation. The ego vehicle hits
another car.
ent takes, the bigger the perturbations. Therefore, the
parameters are carefully tuned to allow the attack to
converge quickly while maintaining a reasonable per-
turbation size to enable a distortion to within 0.2, rep-
resenting the 10% deviation from its original value,
while allowing the attack to be carried out within 100
iterations. Small perturbations created by adversarial
machine learning like this may help the attack avoid
possible detection. Since ZO SignSGD can minimize
both Loss1 and Loss2 as defined in Equation 5 and 7,
as the iteration grows, distortion can be minimized if
parameters are tuned in such a way. This trend already
can already be seen in Figure 2.
6.4 Defenses
Employing the approach outlined in Algorithm 2, we
further trained the DQN and DDPG policies that were
initially compromised by the adversarial attack for an
extra 5,000 and 10,000 time steps, respectively, this
time incorporating adversarial observations into the
learning process. The progression of the reward per
episode during this adversarial training phase can be
visualized in Figure 4 and Figure 5.
Despite the initial attack, both policies exhibited
a marginal increase in the reward per episode fol-
lowing adversarial training, suggesting some degree
of learned resilience against adversarial manipula-
tion. However, it is noteworthy that this increase was
rather insubstantial, particularly in the case of DQN.
Moreover, despite maintaining identical training pa-
rameters, the mean reward per episode for both poli-
cies during adversarial training was lower than that
achieved during the initial training phase.
This decline in performance is likely to be at-
tributed to overfitting to the perturbed observations.
The model’s parameters have essentially learned to
respond specifically to the adversarial patterns in
the observations, thereby diminishing its performance
under normal conditions. This is particularly evident
in Figure 5, where the reward per episode shows a de-
clining trend, a classic indicator of overfitting.
The trade-off between robustness and perfor-
mance in adversarial settings is a well-documented
challenge in machine learning literature. A semi-
nal 2019 paper elucidated this issue by demonstrating
worsened generalization performance of deep learn-
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Steps
0
10
20
30
40
50
60
70
Mean Episode Reward
Figure 4: Reward/Episode for adversarial training of
DDPG.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Steps
60
70
80
90
100
110
120
130
Mean Episode Reward
Figure 5: Reward/Episode for adversarial training of DQN.
ing networks under adversarial training (Raghunathan
et al., 2019). More recently, in 2022, potential ex-
planations for this trade-off were proposed, such as
the lower utility of robust features for generaliza-
tion tasks or the insufficiency of datasets for adver-
sarial training (Clarysse et al., 2022). This dilemma
is manifested in our experiment, wherein the adver-
sarially trained policies underperformed compared to
their non-adversarially trained counterparts. This un-
derscores the complexity of designing reinforcement
learning policies that are both robust to adversarial at-
tacks and proficient at their designated tasks.
6.5 Results
A table of mean rewards for each model is shown in
Table 1. The highest obtainable reward per episode
is 450, with one reward per step if the agent reaches
high speed, stays in the right lane, and does not crash.
The environment has completely random vehicle lay-
outs every single time. Therefore the agent would not
be able to obtain the total 450 rewards as it is often
required to slow down, change lanes out of the right
lane to avoid a collision or maintain the high-speed
reward.
Zeroth-Order Optimization Attacks on Deep Reinforcement Learning-Based Lane Changing Algorithms for Autonomous Vehicles
671
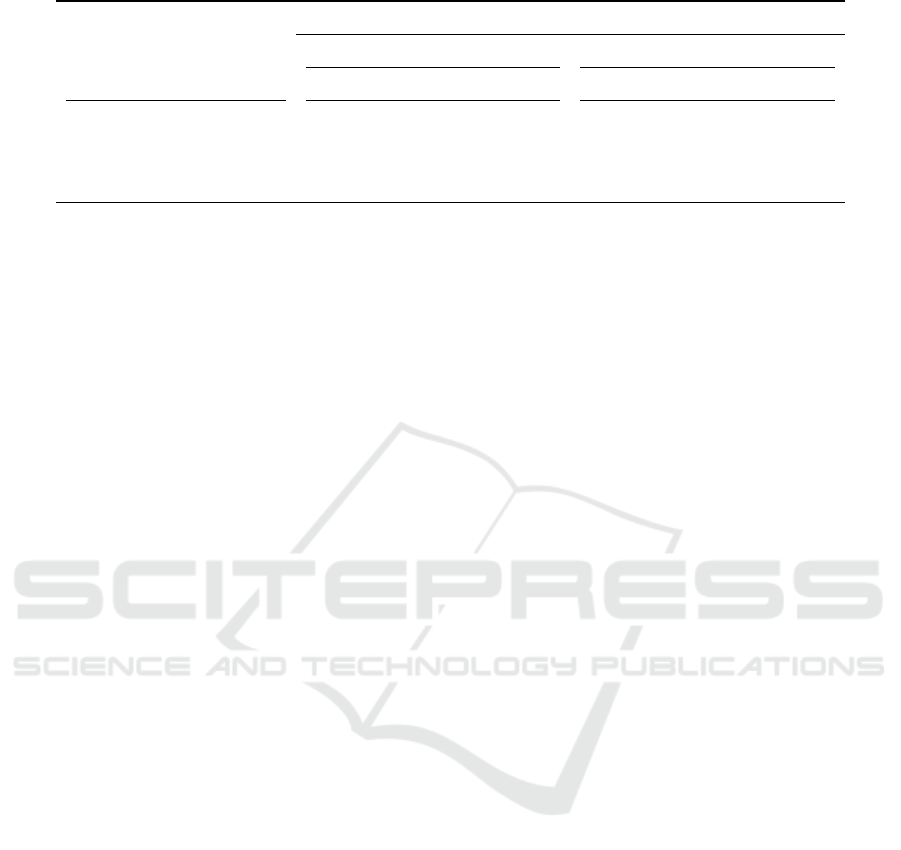
Table 1: Mean reward of each model with the maximum theoretical reward of 450.
Policy
DQN DDPG
Scenarios Reward [% of theoretic max] Reward [% of theoretic max]
Initial Training 310.58 69.01% 232.78 51.73%
Under Attack 108.22 24.89 % 45.44 10.09 %
Adversarial Training 111.08 22.78 % 62.40 13.87 %
After Training (No Attack) 149.33 33.18 % 91.22 20.27 %
The reward is calculated by finding the mean of re-
wards for 100 episodes. The environment calculates
the reward, as shown in Equation 1. For Initial Train-
ing and After Training, no attacks are performed on
the observation. The rewards are collected to show the
generalized performance of the model. For Under At-
tack and Adversarial Training, the attack is performed
on the observation to force the policy into performing
only one action, if the perturbation converges within
the given number of iterations.
As seen in Table 1 in the scenario Initial Training,
the agents performed relatively well, setting up a good
baseline performance of the policies. However, both
policies fail to perform as the attacks take place in
Under Attack. Some marginal performance gain is
seen after the policies undergo Adversrial Training.
But overall generalized performance is suffering as
seen in After Training.
7 CONCLUSION AND FUTURE
WORK
In this work, we harnessed the ZO-SignSGD method
to craft perturbations capable of triggering the fail-
ure of trained reinforcement learning models. Re-
markably, these attacks were successfully carried out
on both DQN and DDPG models by introducing per-
turbations to the observation space, even without ac-
cess to the actual gradient information of the mod-
els. While the untouched models achieved high re-
wards — approximately 310 and 250, respectively —
the targeted attacks significantly disrupted the perfor-
mance of the ego vehicle, forcing it to follow the at-
tacker’s actions and plummeting the reward to near
zero. This unique vulnerability underscores the vul-
nerabilities of reinforcement learning models to ad-
versarial attacks even when the attacker lacks detailed
model information.
In response to these successful attacks, we trained
the models using these adversarial examples to en-
hance their robustness. Both models demonstrated an
increased resilience, improving their rewards in the
face of adversarial observations. However, it’s impor-
tant to note that adversarial training proved to be a
time-intensive process, and the resulting models un-
derperformed their original versions. This trade-off,
where adversarial training dampens a model’s gener-
alization performance, mirrors findings observed in
other machine learning applications (Clarysse et al.,
2022).
Our adversarial attacks, while effective, are not
yet optimized. Future work could draw inspiration
from the adversarial attack strategies in the broader
machine learning field, potentially leading to stronger
and more efficient attacks. This could involve, for in-
stance, targeting keyframes during the vehicles’ oper-
ation. Moreover, testing the transferability of adver-
sarial examples across different models could provide
critical insights into the vulnerability of autonomous
vehicles, particularly since deep reinforcement learn-
ing models often perform identical tasks. To prevent
fast and catastrophic perturbations by attackers, it will
be crucial to test these examples in real-world scenar-
ios.
As demonstrated in this paper, adversarial train-
ing is not a panacea for these adversarial threats. It
may cause an unexpected loss of rewards if the model
adapts too much to the adversarial observation. Given
the requirement for autonomous vehicles to function
flawlessly under all circumstances. Further investi-
gation into other defensive measures is imperative to
build more robust and secure systems. These could in-
clude intrusion detection systems, model distillation,
and model verification. Each of these could poten-
tially contribute to a more comprehensive solution,
mitigating the risks of adversarial attacks.
REFERENCES
Boloor, A., Garimella, K., He, X., Gill, C., Vorobeychik, Y.,
and Zhang, X. (2020). Attacking vision-based percep-
tion in end-to-end autonomous driving models. Jour-
nal of systems architecture, 110:101766–.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
672

Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nAI Gym. arXiv 1606.01540.
Buddareddygari, P., Zhang, T., Yang, Y., and Ren, Y.
(2022). Targeted Attack on Deep RL-based Au-
tonomous Driving with Learned Visual Patterns. In
2022 International Conference on Robotics and Au-
tomation (ICRA), pages 10571–10577.
Cao, Y., Xiao, C., Cyr, B., Zhou, Y., Park, W., Rampazzi,
S., Chen, Q. A., Fu, K., and Mao, Z. M. (2019). Ad-
versarial Sensor Attack on LiDAR-Based Perception
in Autonomous Driving. In Proceedings of the 2019
ACM SIGSAC Conference on Computer and Commu-
nications Security, CCS ’19, page 2267–2281, New
York, NY, USA. Association for Computing Machin-
ery.
Carlini, N. and Wagner, D. (2017). Towards Evaluating the
Robustness of Neural Networks. In 2017 IEEE Sym-
posium on Security and Privacy (SP), pages 39–57.
Chebotar, Y., Hausman, K., Lu, Y., Xiao, T., Kalashnikov,
D., Varley, J., Irpan, A., Eysenbach, B., Julian, R.,
Finn, C., and Levine, S. (2021). Actionable Mod-
els: Unsupervised Offline Reinforcement Learning of
Robotic Skills. arXiv 2104.07749.
Clarysse, J., H
¨
orrmann, J., and Yang, F. (2022). Why
adversarial training can hurt robust accuracy. arXiv
2203.02006.
Goodfellow, I. J., Shlens, J., and Szegedy, C. (2015). Ex-
plaining and Harnessing Adversarial Examples. arXiv
1412.6572.
He, X., Yang, H., Hu, Z., and Lv, C. (2023). Robust Lane
Change Decision Making for Autonomous Vehicles:
An Observation Adversarial Reinforcement Learning
Approach. IEEE Transactions on Intelligent Vehicles,
8(1):184–193.
Huang, S., Papernot, N., Goodfellow, I., Duan, Y., and
Abbeel, P. (2017). Adversarial Attacks on Neural Net-
work Policies. arXiv 1702.02284.
Isele, D., Nakhaei, A., and Fujimura, K. (2018). Safe Re-
inforcement Learning on Autonomous Vehicles. In
2018 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 1–6.
Kalashnikov, D., Varley, J., Chebotar, Y., Swanson, B., Jon-
schkowski, R., Finn, C., Levine, S., and Hausman, K.
(2021). MT-Opt: Continuous Multi-Task Robotic Re-
inforcement Learning at Scale. arXiv 2104.08212.
Kingma, D. P. and Ba, J. (2017). Adam: A Method for
Stochastic Optimization. arXiv 1412.6980.
Leurent, E. (2018). An Environment for Autonomous Driv-
ing Decision-Making. GitHub.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2019). Contin-
uous control with deep reinforcement learning. arXiv
1509.02971.
Liu, S., Chen, P.-Y., Chen, X., and Hong, M. (2019).
signSGD via Zeroth-Order Oracle. In International
Conference on Learning Representations.
Liu, S., Chen, P.-Y., Kailkhura, B., Zhang, G., Hero III,
A. O., and Varshney, P. K. (2020). A Primer on
Zeroth-Order Optimization in Signal Processing and
Machine Learning: Principals, Recent Advances, and
Applications. IEEE Signal Processing Magazine,
37(5):43–54.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing Atari with Deep Reinforcement
Learning. arXiv 1312.5602.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller,
M., Fidjeland, A. K., Ostrovski, G., Petersen, S.,
Beattie, C., Sadik, A., Antonoglou, I., King, H., Ku-
maran, D., Wierstra, D., Legg, S., and Hassabis, D.
(2015). Human-level control through deep reinforce-
ment learning. Nature, 518(7540):529–533.
Moosavi-Dezfooli, S.-M., Fawzi, A., and Frossard, P.
(2016). Deepfool: a simple and accurate method to
fool deep neural networks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 2574–2582.
Papernot, N., McDaniel, P., Wu, X., Jha, S., and Swami,
A. (2016). Distillation as a Defense to Adversarial
Perturbations against Deep Neural Networks. arXiv
1511.04508.
Pattanaik, A., Tang, Z., Liu, S., Bommannan, G., and
Chowdhary, G. (2017). Robust Deep Reinforce-
ment Learning with Adversarial Attacks. arXiv
1712.03632.
Powell, M. J. D. (1994). A Direct Search Optimiza-
tion Method That Models the Objective and Con-
straint Functions by Linear Interpolation, pages 51–
67. Springer Netherlands, Dordrecht.
Raffin, A., Hill, A., Gleave, A., Kanervisto, A., Ernestus,
M., and Dormann, N. (2021). Stable-Baselines3: Reli-
able Reinforcement Learning Implementations. Jour-
nal of Machine Learning Research, 22(268):1–8.
Raghunathan, A., Xie, S. M., Yang, F., Duchi, J. C., and
Liang, P. (2019). Adversarial Training Can Hurt Gen-
eralization. arXiv 1906.06032.
Shahriari, B., Swersky, K., Wang, Z., Adams, R. P., and
de Freitas, N. (2016). Taking the Human Out of the
Loop: A Review of Bayesian Optimization. Proceed-
ings of the IEEE, 104(1):148–175.
Sinha, A., Namkoong, H., Volpi, R., and Duchi, J. (2020).
Certifying Some Distributional Robustness with Prin-
cipled Adversarial Training. arXiv 1710.10571.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Erhan,
D., Goodfellow, I., and Fergus, R. (2014). Intriguing
properties of neural networks. arXiv 1312.6199.
Zeroth-Order Optimization Attacks on Deep Reinforcement Learning-Based Lane Changing Algorithms for Autonomous Vehicles
673
