
Trajectory Planning for Multiple Vehicles Using Motion Primitives: A
Moving Horizon Approach Under Uncertainty
Bahaaeldin Elsayed
1
and Rolf Findeisen
2
1
Systems Theory and Automatic Control, Otto von Guericke University Magdeburg, Germany
2
Control and Cyber-Physical Systems, Technische Universit
¨
at Darmstadt, Germany
fi
Keywords:
Model Predictive Control, Multi-Mode Operation, System Uncertainty, Mixed Integer Linear Programming,
Motion Primitives.
Abstract:
Planning motion in cluttered and uncertain environments for autonomous systems remains a daunting chal-
lenge, especially when prioritizing safety and efficiency. This paper introduces an innovative method of meld-
ing motion primitives with a moving horizon strategy, drawing on the principles of model predictive control.
Using motion primitives, we achieve simplified, high-level depictions of vehicle movement using various lin-
ear time-invariant models for each mode. This significantly cuts computational complexity in the subsequent
planning stages. We integrate constraint backoff based on system uncertainties to ensure that generated tra-
jectories are robust, collision-free, and adhere to all necessary constraints. This comprehensive framework
produces optimal, safe trajectories that cater to environmental uncertainties and are suitable for real-time
applications. Our simulation outcomes robustly highlight the strengths and distinctiveness of the proposed
approach.
1 INTRODUCTION
Motion planning for autonomous vehicles operating
in cluttered environments is complex and demanding.
It involves finding an optimal trajectory for the ve-
hicle to safely navigate from its current location to
a goal point, considering the presence of static and
moving obstacles, the physical limitations of the ve-
hicle, uncertainties, and disturbance while being real-
time capable (LaValle, 2006). The problem becomes
even more challenging when multiple vehicles are in-
volved, as one vehicle’s motion can impact others’
motion, and guaranteed collision avoidance becomes
a critical concern. Therefore, there is a significant
need to develop robust and efficient motion planning
algorithms that can handle the uncertainties and com-
plexities of real-world scenarios, such as fleet ad-
ministration, search and rescue operations, and agri-
culture operations in harsh conditions (Wong et al.,
2017).
Several approaches have been proposed for solv-
ing the motion planning problem for autonomous
vehicles, e.g., graph-based approaches (Stahl et al.,
2019), probabilistic planning approaches (Wang
et al., 2022), and optimization-based approaches (Ku-
lathunga and Klimchik, 2022), depend on the specific
requirements and constraints of the problem. For a
comprehensive overview, we refer to (Laumond et al.,
1998; LaValle, 2006; Goerzen et al., 2010; Latombe,
2012). While these approaches offer valuable in-
sights, they often have limitations regarding scalabil-
ity, robustness, and adaptability to changing environ-
ments. When selecting an approach, it is essential to
consider the trade-offs between accuracy and compu-
tational complexity (LaValle, 2006).
Recently, model predictive control (MPC) has
emerged as a powerful motion planning framework
involving multiple autonomous vehicles (Zuo et al.,
2020; Liu et al., 2017). The basic concept of MPC is
based on the repeated solution of optimization prob-
lems taking the system dynamics and obstacles via
constraints into account. Only the first path segment
is applied, and then the process is repeated until the
goal is reached (Findeisen and Allg
¨
ower, 2002; Mat-
tingley et al., 2011; Rawlings et al., 2017a). MPC
has several advantages over traditional methods, in-
cluding handling complex constraints, incorporating
multiple objectives, and adapting to changing envi-
ronments (Rawlings et al., 2017b).
However, solving the resulting optimization plan-
ning problem is often computationally challenging
(Reiter and Reiter, 2020). Therefore, often different
Elsayed, B. and Findeisen, R.
Trajectory Planning for Multiple Vehicles Using Motion Primitives: A Moving Horizon Approach Under Uncertainty.
DOI: 10.5220/0012188700003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 229-236
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
229

approximations and simplifications are used. How-
ever, generating a safe trajectory using a simplified
vehicle model is affected by uncertainty in the ve-
hicle’s dynamics and the environment. It may lead
to suboptimal or unsafe control sequences (Borrelli
et al., 2017). Various robust MPC approaches, such
as stochastic, robust, set-theoretic, and adaptive ap-
proaches, have been proposed to overcome these
drawbacks. However, these methods can be com-
putationally expensive, challenging to implement,
or prone to instability (Magdici and Althoff, 2016;
Rawlings et al., 2017b).
Motivated by robust predictive control, we pro-
pose an approach that combines contract-based model
predictive control (CB-MPC) (Ibrahim et al., 2020;
K
¨
ogel et al., 2022) with Point-to-Point motion primi-
tives (PTP) to handle uncertainty in motion planning
while improving performance and reducing computa-
tional time complexity. The combination results in a
mixed-integer linear programming optimization prob-
lem, which generates safe, optimal, and smooth refer-
ence trajectories while avoiding obstacles even in un-
certain conditions. The simulation results show the
method’s effectiveness in maximizing vehicle perfor-
mance while handling the impact of uncertainty.
The remainder of the paper is structured as fol-
lows. Section 2 presents the problem formulation for
a single vehicle and its extension to multiple vehi-
cles. Section 3 illustrates the planning strategy and
how to integrate motion primitives in the hybrid ro-
bust receding horizon planning formulation. Section
4 presents the mathematical structure of the proposed
point-to-point motion primitives integration with a
contract-based MPC framework for real-time appli-
cations. The simulations are presented in Section 5
before concluding the paper with final remarks in Sec-
tion 6.
2 PROBLEM FORMULATION
Motion planning for autonomous vehicles in cluttered
environments aims to find a safe and optimal trajec-
tory to reach its goal while considering various con-
straints. Physical limitations of the vehicle, such as
maximum speed and acceleration, must be considered
to ensure safety, stability, and performance. The pres-
ence of static and moving obstacles in the environ-
ment limits the motion options and requires the mo-
tion planner to continuously update its plan to prevent
collisions. Due to the unpredictable motion of ob-
stacles, the uncertainty in the environment requires
the solution to be robust. Real-time motion plan-
ning presents a complex optimization problem as it
requires balancing conflicting objectives, such as task
objectives, collision avoidance, and obstacle avoid-
ance while considering the uncertainty in the envi-
ronment. This requires the solution to be computed
quickly enough to meet the real-time demands of the
vehicle’s motion. Furthermore, a new layer of com-
plexity arises when extending motion planning algo-
rithms to scenarios involving multiple vehicles navi-
gating cluttered environments. The presence of mul-
tiple vehicles increases the complexity of the opti-
mization problem. It requires the motion planner to
consider not only the avoidance of static obstacles
but also dynamic obstacles in the form of other ve-
hicles. The motion planning algorithm must handle
these complexities while satisfying the safety and sta-
bility requirements.
3 PLANNING STRATEGY
This paper addresses the challenge of devising a fea-
sible and optimal trajectory for one or more au-
tonomous vehicles (denoted as V ) to navigate from
an initial point (x
start
) to a destination (x
goal
) in a clut-
tered environment. This task involves considering un-
certainties and adhering to various constraints, includ-
ing dynamics, kinematics, and collision avoidance,
while simultaneously optimizing objectives like en-
ergy consumption and minimizing the distance to the
goal point at each time step, as illustrated in Fig. 2.
To tackle this complex problem, we propose a
robust motion planning approach that leverages a
Contract-based Model Predictive Control (CB-MPC)
framework and integrates it with the Point-to-Point
(PTP) primitives approach, as depicted in Fig. 1.
The resulting optimization problem is formulated as a
Mixed-Integer Linear Programming (MILP) problem.
MILP offers several advantages, notably its ability to
handle continuous and discrete variables. This is es-
sential for addressing challenges where discrete deci-
sions, such as mode changes due to environmental al-
terations, task objectives, or the vehicle’s capabilities,
are required (Schouwenaars et al., 2004; Schouwe-
naars, 2006).
To facilitate the understanding of the proposed ap-
proach, we will start by considering its application to
a single vehicle and present the extension to multiple
vehicles in Section 4.
3.1 Contract-Based MPC Approach
In (Ibrahim et al., 2020), a contract-based Model
Predictive Control (MPC) framework is introduced
to handle deterministic bounded uncertainty sets by
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
230

Task Objective
Optimizer
Approximated
System Dynamics
MILP Optimization Problem
On-line Moving Horizon Trajectory Planning
Low-level Controller
Autonomous System
Motion Primitives
Safety contracts
Multiple LTI Models
Environment
Obstacles
System Dynamics
Figure 1: Motion primitives integration with safety contract
receding horizon planner structure for online trajectory gen-
eration of autonomous vehicles under uncertainty.
defining feasible states and controlling input sets.
This MPC framework predicts future vehicle motion
and optimizes control inputs to achieve desired per-
formance.
The contract-based approach formulates the un-
derlying optimization problem as a Mixed-Integer
Linear Programming (MILP) problem. This MILP
problem considers various constraints and accounts
for environmental uncertainty while capturing vehi-
cle capabilities through contract sets and precision-
uncertainty specifications. These contracts ensure the
satisfaction of various properties, including constraint
compliance.
By employing the contract-based approach, a
clear separation is achieved between the planning
phase and the execution of the navigation objective.
This separation enhances the overall efficiency and
reliability of the motion planning process (Ibrahim
et al., 2020; K
¨
ogel et al., 2022).
To illustrate this contract-based approach, let’s
consider that linear time-invariant models represent
the dynamics of different modes for an autonomous
vehicle.
∀i ∈ {1, ... ,L}
x(k + 1) =A
i
x(k) + B
i
u(k) + ω(k), (1a)
y(k) =C
i
x(k), (1b)
x(k) ∈ X
i
, u(k) ∈ U
i
, (1c)
ω(k) ∈W
i
. (1d)
Here L is the number of modes, x(k) ∈ R
n
,u(k) ∈ R
m
are the vehicle’s states and inputs, while y(k) ∈ R
p
are the vehicle’s outputs (positions). A
i
,B
i
,C
i
,∀i ∈
{1,. .. ,L} are matrices of corresponding dimensions
for each mode i. Note that the dynamics are subject
to bounded uncertainties ω(k) given by:
∀i ∈ {1, ...,L}
If x(k) ∈ X
i
⊆ X, and u(k) ∈ U
i
⊆ U,
Then w(k) ∈ W
i
⊆ W.
We assume that X
i
, U
i
, and W
i
are convex compact
polytopes. The modes and uncertainty sets allow cap-
turing mode-dependent disturbances. For example, if
the vehicle moves slowly, the disturbance might be
smaller; see Fig. 2. Fast operation leads to a larger
disturbance set, e.g., capture unmodeled system dy-
namics. Note that the sets X
i
and/or U
i
can overlap
∀i ̸= j, X
i
∩ X
j
̸=
/
0, U
i
∩ U
j
̸=
/
0.
Obstacle Avoidance with Operation Mode Depen-
dent Obstacle Enlargements:
The vehicles should navigate safely despite the dis-
turbances and model uncertainties; see Fig. 2, i.e., the
vehicle’s position y(k) should be outside the obstacle
set; see Fig. 3
y(k) /∈ O
i
To avoid obstacle collisions, we use safety margins
δ
i
according to the ”active” operation mode W
i
, see
Fig. 3. This formulation provides a modular and eas-
ily constructed simple low-level velocity controller
to drive the vehicle to its final destination while ef-
ficiently satisfying the constraints and rejecting exter-
nal disturbance.
Figure 2: Conservative obstacle enlargement without a fea-
sible solution or a very long solution path due to short hori-
zon.
3.2 Motion Primitives to Limit Planning
Complexity
PTP motion primitives are fundamental in au-
tonomous motion planning, facilitating real-time,
Trajectory Planning for Multiple Vehicles Using Motion Primitives: A Moving Horizon Approach Under Uncertainty
231
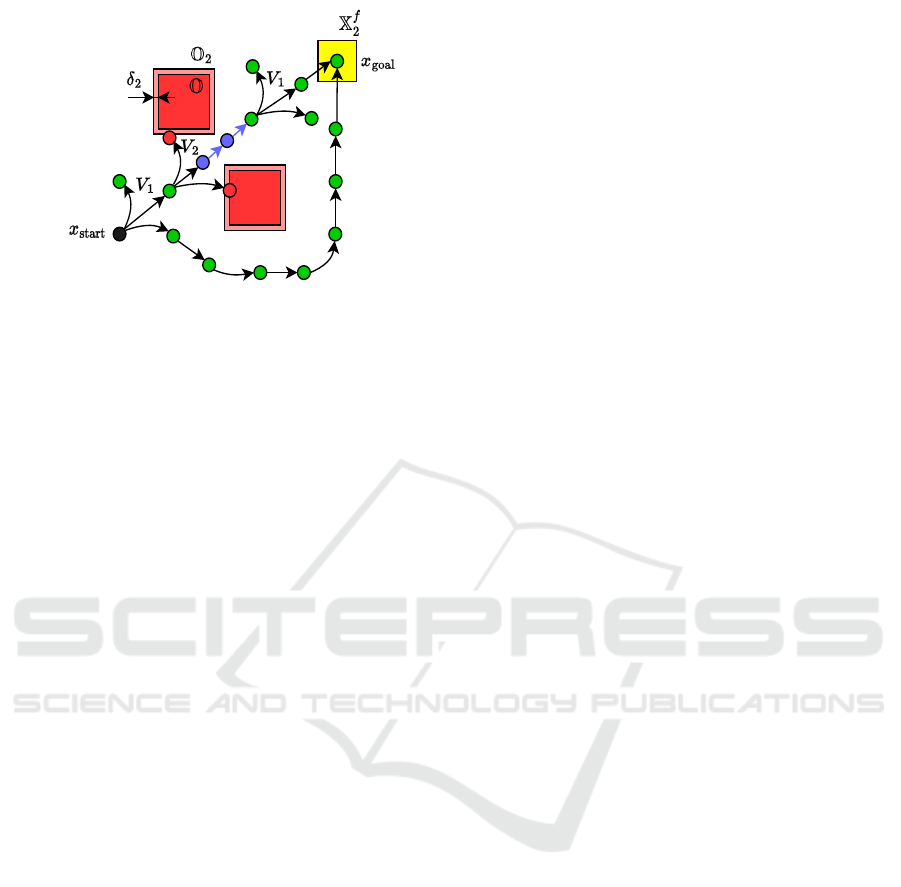
Figure 3: Smaller obstacle enlargement considering the
slow motion, which allows the planner to find a feasible
solution by switching between different velocity modes.
smooth trajectory generation (LaValle, 2006; Sicil-
iano et al., 2008; Mahulea et al., 2020). They compile
a pre-computed table of feasible control inputs, adapt-
ing to the vehicle’s mode of operation for swift exe-
cution and responsive path adjustments. This reduces
computational complexity (Frazzoli, 2001). PTP mo-
tion primitives ensure continuous and seamless ve-
hicle motion (Bottasso et al., 2008; Pivtoraiko and
Kelly, 2011). These trajectories are generated by sim-
ulating the vehicle’s dynamics with various control
inputs, allowing simultaneous consideration of mul-
tiple objectives such as goal attainment, energy ef-
ficiency, and collision avoidance. The approach re-
mains flexible and modular, requiring no alterations
to the generalized motion primitives set, while infea-
sible primitives can be excluded during optimization
(Mahulea et al., 2020) (Fig. 2).
Control inputs at each time step, u(k) ∈ U
mp
, are
expressed as a linear combination of motion primi-
tives, P, using a binary selection variable, b
i
. The op-
timization problem selects the most suitable motion
primitive while respecting constraints and objectives,
where i is the index of the motion primitive:
u(k) =
J
∑
j=1
b
j
P (3)
Where J is the number of motion primitives, the bi-
nary variable, b
i
, is defined such that only one mo-
tion primitive can be selected at each time step, i.e.,
∑
n
j=1
b
j
= 1 and b
j
∈ 0,1. The optimization problem
can be formulated to select the most suitable motion
primitive at each time step while considering the con-
straints and objectives of the motion planning prob-
lem.
3.3 Combining Motion Primitives and
Contract-Based MPC
The proposed method provides a more modular and
efficient solution by formulating the motion planning
problem as a MILP optimization and creating a con-
tract between the high-level planner and low-level
controller. CB-MPC is a framework that uses con-
tracts, in other cases in the form of sets or constraints,
to ensure system safety while still optimizing the de-
sired performance objective. The combination of PTP
with CB-MPC provides a robust solution to the mo-
tion planning problem, as the contracts can be updated
in real-time based on the system’s current state and
the environment’s status.
4 ROBUST MILP FORMULATION
To obtain a computationally feasible optimization
problem, we consider simplified, discretized vehicle
and moving obstacle dynamics. By fusing motion
primitives and contracts, we obtain the following op-
timization problem:
minimize
{x},{u}, i
J
x
p
(k), u
p
(k)
(4a)
subject to ∀p ∈ {1,...,V },
∀k ∈ {0,...,N − 1},∀i ∈ {1,...,L},
x
p
(k + 1) = A
i
p
x
p
(k) + B
i
p
u
p
(k) + ω
i
p
(k),
(4b)
y
p
(k) = C
i
p
x(k), (4c)
x
p
(k) ∈ X
i
p
⊆ X
i
free,p
⊂ X
p
, (4d)
u
p
(k) ∈ U
mp,i
p
∈ U
i
p
⊆ U
p
, (4e)
y
p
(k) /∈ O
i
p
→ y
p
(k) ∈ Y
free,p
, (4f)
Y
free,p
= Y
p
\ Y
obs,p
, (4g)
ω
p
(k) ∈ W
i
p
⊆ W
p
, (4h)
x
p
(N) ∈ X
f ,i
p
⊆ X
free,p
, (4i)
where V is the number of the vehicles, N is the plan-
ning horizon, i represents the operation mode, and L
is the modes number. A
i
p
,B
i
p
,C
i
p
are the model of the
vehicle p at the mode i. The optimal solution x
∗
(k)
minimizes the path cost J, which we assume to be
given by:
J(x, u) =
V
∑
p=0
(||x
goal,p
− x
p
(N)||
∞
+
N−1
∑
k=0
||u
p
(k)||
∞
)
(5)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
232

Here ||p
v
(k)||
∞
penalize the control input, while the
terminal cost penalizes the distance to the goal point
x
goal
at the end of the planning horizon for each vehi-
cle.
4.1 Obstacle Avoidance
To simplify the problem’s complexity, we consider
that the vehicles operate in a two-dimensional space
and that the obstacles are rectangular. The position of
the obstacle is defined by its lower left and upper right
corner points, denoted by (x
min
,y
min
) and (x
max
,y
max
),
respectively.
At each time step k, the position of each vehicle
must be located outside of the obstacle. The moving
object’s size is considered, and the obstacles are ac-
cordingly enlarged, reducing each vehicle to a moving
point. This approach ensures safe and efficient navi-
gation for all vehicles in the same workspace while
avoiding collisions with the same obstacle. This can
be formulated as:
∀p ∈ {1,...,V },∀k ∈ {0, .. ., N − 1} :
x
p,k
≤ x
min
or x
p,k
≥ x
max
or y
p,k
≤ y
min
or y
p,k
≥ y
max
4.2 Collision Avoidance
When multiple vehicles are travelling to different des-
tinations, avoiding collisions between them can be ap-
proached like avoiding stationary obstacles. At each
time step, a minimum distance must be maintained
between each pair of vehicles. For example, consid-
ering the position and the velocity for any pair of ve-
hicles p and q at the k
th
time step as (x
p,k
,y
p,k
) and
(x
q,k
,y
q,k
) respectively. Then the safety distance be-
tween them can be denoted by d
safety
for each axis as
the following:
∀k ∈ {0,...,N − 1} :∀p,q | q > p :
|x
p,k
− x
q,k
| ≥ d
safety
|y
p,k
− y
q,k
| ≥ d
safety
The resulting non-convex constraint can be ap-
proximated by convex polygons using the Big-M
method, introducing extra binary variables in the op-
timization problem. For further details, we refer to
(Ibrahim et al., 2019; Schouwenaars, 2006; Frazzoli,
2001).
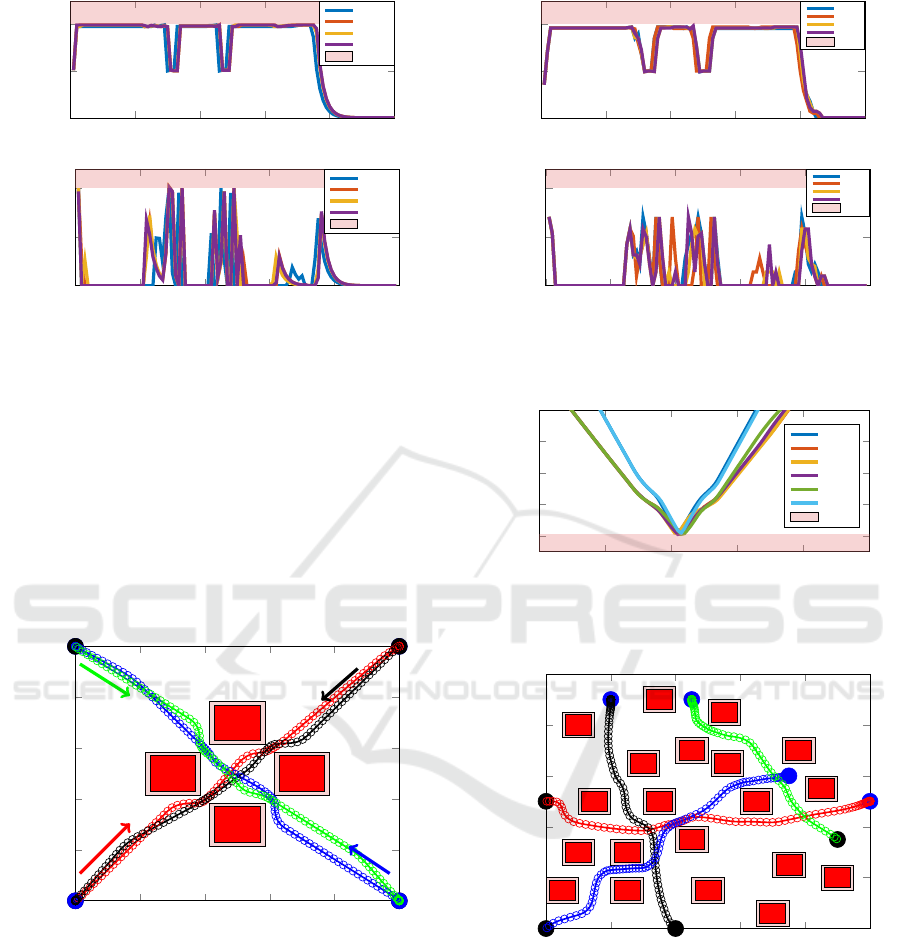
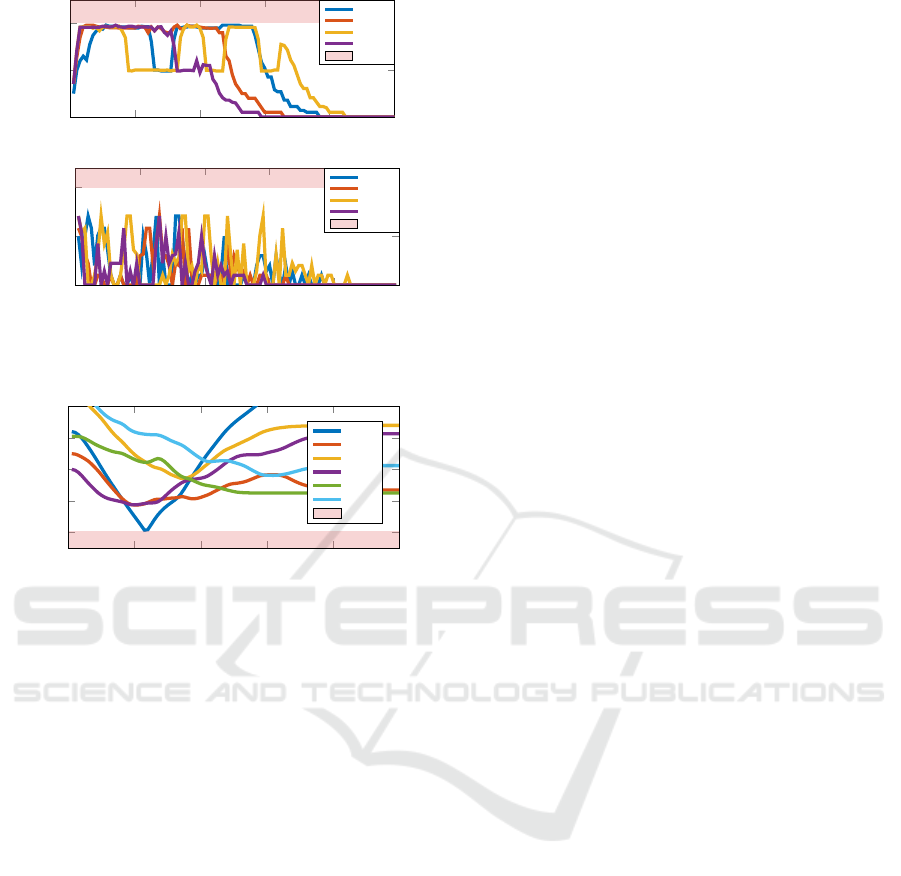
5 SIMULATION RESULTS
To demonstrate the efficacy of the proposed com-
bination of point-to-point motion primitives and a
robust contract-based receding horizon planning ap-
proach, we consider a simulation scenario in which
vehicles operate in an environment filled with obsta-
cles to reach their goal optimally. The vehicle model
has four states, x =
p
x
p
y
v
x
v
y
⊤
, where p
x
and p
y
are positions, and v
x
, v
y
are the velocities.
u(k) =
a
x
a
y
⊤
are the inputs, i.e. the accelerations
in x and y direction.
We consider a group of four homogeneous vehi-
cles, V = 4, each with its start and goal points, op-
erating simultaneously in the cluttered environment.
Each vehicle can operate in two modes, each defined
by a different set of state constraints based on differ-
ent velocity bounds. Mode 1 has a velocity bound
from 0 to 1 [m/s], while Mode 2 has a velocity bound
from 1 to V
max
[m/s]. Based on the current velocity,
each vehicle is subject to bounded uncertainty, and
therefore, higher safety margins are required for op-
erating in mode 2 compared to mode 1. Addition-
ally, a safety margin is added to prevent the collision
between any two pairs of vehicles during operation,
d
safety
= 1 [m/s]. A finite set of motion primitives in
the input space U
mp
= [−1,1] with sample step size
∆u = 0.1 is used.
The resulting optimization problems are formu-
lated via YALMIP (L
¨
ofberg, 2004) and solved via
Gurobi (Optimization, 2014). To illustrate the effec-
tiveness of the proposed approach, we consider two
different scenarios. First, we assume that we have
four vehicles in the corners of the square area, and
their final goal is to reach the opposite corner. In this
0 20 40 60 80 100
0
20
40
60
80
100
X [m]
Y [m]
vehicle 1
vehicle 2
vehicle 3
vehicle 4
Figure 4: Scenario 1: Trajectory Generation of the Au-
tonomous Vehicle without motion primitives with symmet-
ric paths.
Trajectory Planning for Multiple Vehicles Using Motion Primitives: A Moving Horizon Approach Under Uncertainty
233
0 20 40 60 80 100
0
1
2
Time (sec)
Velocity (m/sec)
v1
v2
v3
v4
Constr.
0 20 40 60 80 100
0
0.5
1
Time (sec)
Acceleration (m/sec
2
)
v1
v2
v3
v4
Constr.
Figure 5: Scenario 1: Velocity and acceleration profile with-
out motion primitives with symmetric path.
scenario, each vehicle is expected to move the same
distance while satisfying obstacle and collision avoid-
ance constraints, optimizing energy consumption, and
minimizing the distance to the goal points at each time
step. The second scenario selects arbitrary random
start and goal points in a high-density, cluttered envi-
ronment.
5.1 Results Discussions
0 20 40 60 80 100
0
20
40
60
80
100
X [m]
Y [m]
vehicle 1
vehicle 2
vehicle 3
vehicle 4
Figure 6: Scenario 2: with motion primitives with symmet-
ric path.
The simulation results demonstrate the capability of
the proposed approach in finding an optimal and
collision-free trajectory for the vehicle to reach its
goal.
As shown in Fig. 4,6,9, the planner can adapt to
different modes of operation, including switching to
a low-velocity mode, to handle uncertainties effec-
tively. However, it is noted that if the vehicle op-
erates at maximum velocity, the planner may not be
able to find a feasible solution because the obstacles
0 20 40 60 80 100
0
1
2
Time (sec)
Velocity (m/sec)
v1
v2
v3
v4
Constr.
0 20 40 60 80 100
0
0.5
1
Time (sec)
Acceleration (m/sec
2
)
v1
v2
v3
v4
Constr.
Figure 7: Scenario 2: Velocity and acceleration profile with
motion primitives with symmetric path.
0 20 40 60 80 100
0
20
40
60
80
Time (sec)
Distance [m]
v1v2
v1v3
v1v4
v2v3
v2v4
v3v4
d
safety
Figure 8: Scenario 2: The relative distance between any two
pairs of vehicles during operation.
0 20 40 60 80 100
0
20
40
60
80
100
X [m]
Y [m]
Figure 9: Scenario 3: Autonomous vehicles trajectory plan-
ning with motion primitives for arbitrary start and goal
points.
are enlarged with a large safety margin. Hence, the
proposed structure provides additional flexibility and
optimizes the vehicle’s potential to achieve the task
objectives with satisfying constraints, as seen in Fig.
5,7, and 10.
Moreover, collision avoidance was effectively
maintained throughout the operation, as evidenced by
Fig 8 and 11, where the distance between any pair
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
234
0 20 40 60 80 100
0
1
2
Time (sec)
Velocity (m/sec)
v1
v2
v3
v4
Constr.
0 20 40 60 80 100
0
0.5
1
Time (sec)
Acceleration (m/sec
2
)
v1
v2
v3
v4
Constr.
Figure 10: Scenario 3: Velocity and acceleration profile
with motion primitives.
0 20 40 60 80 100
0
20
40
60
80
Time (sec)
Distance [m]
v1v2
v1v3
v1v4
v2v3
v2v4
v3v4
d
safety
Figure 11: Scenario 3: The relative distance between any
two pairs of vehicles during operation.
of vehicles remained greater than the safety margin
of the vehicle. Another aspect to consider is the im-
pact of Point-to-Point motion primitives on reducing
the computational time complexity of the problem, as
depicted in Figures 5 and 7. The proposed approach
generates smoother paths with low control effort com-
pared to other approaches without motion primitives.
6 CONCLUSION
We propose a moving horizon approach for multi-
vehicle motion planning in complex and uncertain en-
vironments. Our method combines motion primitives
with principles from model predictive control (MPC).
By employing motion primitives, we create simpli-
fied representations of vehicle movement, each as-
sociated with a specific linear time-invariant model,
significantly reducing computational complexity dur-
ing planning. We also integrate a constraint back-
off mechanism that accounts for model and exter-
nal uncertainties, ensuring the generated trajectories
are robust, collision-free, and adhere to critical con-
straints. Simulation results validate the method’s ef-
fectiveness, showcasing its ability to generate safe
and optimal trajectories for multiple vehicles in real
time.
REFERENCES
Borrelli, F., Bemporad, A., and Morari, M. (2017). Predic-
tive control for linear and hybrid systems. Cambridge
University Press.
Bottasso, C. L., Leonello, D., and Savini, B. (2008).
Path planning for autonomous vehicles by trajectory
smoothing using motion primitives. IEEE Transac-
tions on Control Systems Technology, 16(6):1152–
1168.
Findeisen, R. and Allg
¨
ower, F. (2002). An introduction
to nonlinear model predictive control. 21st Benelux
Meeting on Systems and Control, 11:119–141.
Frazzoli, E. (2001). Robust hybrid control for autonomous
vehicle motion planning. PhD thesis, Massachusetts
Institute of Technology.
Goerzen, C., Kong, Z., and Mettler, B. (2010). A survey of
motion planning algorithms from the perspective of
autonomous uav guidance. Journal of Intelligent and
Robotic Systems, 57(1):65–100.
Ibrahim, M., K
¨
ogel, M., Kallies, C., and Findeisen, R.
(2020). Contract-based hierarchical model predictive
control and planning for autonomous vehicle. IFAC-
PapersOnLine, 53(2):15758–15764.
Ibrahim, M., Matschek, J., Morabito, B., and Find-
eisen, R. (2019). Hierarchical model predictive con-
trol for autonomous vehicle area coverage. IFAC-
PapersOnLine, 52(12):79–84.
K
¨
ogel, M., Ibrahim, M., Kallies, C., and Findeisen, R.
(2022). Safe hierarchical model predictive control
and planning for autonomous systems. arXiv preprint
arXiv:2203.14269.
Kulathunga, G. and Klimchik, A. (2022). Optimization-
based motion planning for multirotor aerial vehicles:
a review. arXiv preprint arXiv:2208.14647.
Latombe, J.-C. (2012). Robot motion planning, volume 124.
Springer.
Laumond, J.-P. et al. (1998). Robot motion planning and
control. Springer.
LaValle, S. M. (2006). Planning algorithms. Cambridge
University Press.
Liu, C., Lee, S., Varnhagen, S., and Tseng, H. E. (2017).
Path planning for autonomous vehicles using model
predictive control. In 2017 IEEE Intelligent Vehicles
Symposium (IV), pages 174–179. IEEE.
L
¨
ofberg, J. (2004). YALMIP: A toolbox for modeling and
optimization in matlab. In Proceedings of the IEEE
International Conference on Robotics and Automation
(ICRA), pages 284–289. IEEE.
Magdici, S. and Althoff, M. (2016). Fail-safe motion plan-
ning of autonomous vehicles. In 2016 IEEE 19th In-
ternational Conference on Intelligent Transportation
Systems (ITSC), pages 452–458. IEEE.
Trajectory Planning for Multiple Vehicles Using Motion Primitives: A Moving Horizon Approach Under Uncertainty
235

Mahulea, C., Kloetzer, M., and Gonz
´
alez, R. (2020). Path
planning of cooperative mobile robots using discrete
event models. John Wiley & Sons.
Mattingley, J., Wang, Y., and Boyd, S. (2011). Reced-
ing horizon control. IEEE Control Systems Magazine,
31(3):52–65.
Optimization, G. (2014). Inc. Gurobi optimizer reference
manual, 2014. URL: http://www. gurobi. com.
Pivtoraiko, M. and Kelly, A. (2011). Kinodynamic mo-
tion planning with state lattice motion primitives. In
2011 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 2172–2179. IEEE.
Rawlings, J. B., Mayne, D. Q., and Diehl, M. (2017a).
Model predictive control: theory, computation, and
design, volume 2. Nob Hill Publishing Madison, WI.
Rawlings, J. B., Mayne, D. Q., and Diehl, M. (2017b).
Model predictive control: theory, computation, and
design, volume 2. Nob Hill Publishing Madison, WI.
Reiter, A. and Reiter, A. (2020). Path and Trajectory Plan-
ning. Springer.
Schouwenaars, T. (2006). Safe trajectory planning of au-
tonomous vehicles. PhD thesis, Massachusetts Insti-
tute of Technology.
Schouwenaars, T., Mettler, B., Feron, E., and How, J.
(2004). Hybrid model for trajectory planning of ag-
ile autonomous vehicles. Journal of Aerospace Com-
puting, Information, and Communication, 1(12):629–
651.
Siciliano, B., Khatib, O., and Kr
¨
oger, T. (2008). Springer
handbook of robotics, volume 200. Springer.
Stahl, T., Wischnewski, A., Betz, J., and Lienkamp, M.
(2019). Multilayer graph-based trajectory planning
for race vehicles in dynamic scenarios. In 2019
IEEE Intelligent Transportation Systems Conference
(ITSC), pages 3149–3154. IEEE.
Wang, L., Yin, G., Xu, L., Dong, F., Xu, M., and
Angcheng He, Z. (2022). Motion planning frame-
work for autonomous vehicle with surrounding vehi-
cle motion prediction in highway scenarios. In 2022
6th CAA International Conference on Vehicular Con-
trol and Intelligence (CVCI), pages 1–6. IEEE.
Wong, C., Yang, E., Yan, X.-T., and Gu, D. (2017). An
overview of robotics and autonomous systems for
harsh environments. In 2017 23rd International Con-
ference on Automation and Computing (ICAC), pages
1–6. IEEE.
Zuo, Z., Yang, X., Li, Z., Wang, Y., Han, Q., Wang, L.,
and Luo, X. (2020). MPC-based cooperative control
strategy of path planning and trajectory tracking for
intelligent vehicles. IEEE Transactions on Intelligent
Vehicles, 6(3):513–522.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
236
