
Joint-Based Robotic Impedance Control Transformations: An
Experimental Study
Carlos Saldarriaga
1 a
, Jos
´
e J. Pati
˜
no
1 b
, Carlos G. Helguero
1 c
and Imin Kao
2 d
1
Facultad de Ingenier
´
ıa en Mec
´
anica y Ciencias de la Producci
´
on, Escuela Superior Polit
´
ecnica del Litoral, ESPOL,
Campus Gustavo Galindo Km 30.5 V
´
ıa Perimetral, P.O. Box 09-01-5863, Guayaquil, Ecuador
2
Department of Mechanical Engineering, Stony Brook University, Stony Brook, NY, U.S.A.
Keywords:
Impedance, Robotics, Control, Damping.
Abstract:
We present an experimental study in this paper to illustrate the effect of the Cartesian damping matrix on mod-
ulating the dynamic response of a robotic manipulator in impedance control. We first derive the transformation
of the matrices of impedance control between the Cartesian and joint spaces using differential mathematics.
Through experiments conducted on a redundant Franka Panda robot, it is demonstrated that the coupling term
between damping and stiffness in impedance control derived from theoretical analysis, when transforming
between the Cartesian and joint spaces, is important in stabilizing the dynamic response of the joints. We
apply a methodology to modulate the dynamic response of a robot performing impedance control that allows
us to study and select diagonal and off-diagonal elements of the Cartesian damping matrix according to the
damping ratios and natural frequencies of the system in the modal space. In addition, we explain and show that
an arbitrary selection of damping is counter-productive for robots to perform tasks under impedance control,
and may lead to instability and out-of-range torques at the joints of the robotic manipulator.
1 INTRODUCTION
The main goal of impedance control at the task space
level, and all its variations is to obtain a desired com-
pliant behavior between the robot and its environment
(Hogan, 1985; Khatib, 1987; Villani and De Schut-
ter, 2008). In this type of controller, a mass-spring-
damper relationship between task forces, f, and the
errors of position and velocity of the end effector is
used. There are basically two ways of implement-
ing Cartesian impedance control (without inertia re-
shaping). One is by obtaining the interaction forces
from the errors directly in the Cartesian space and
then transform the forces into joint torques by equa-
tion (4). The other is by joint-based impedance con-
trol, where all the parameters are either given in the
joint space or mapped from the Cartesian into the
joint space, and the joint torques can be obtained di-
rectly in the joint space. A joint-based impedance
control in combination with a closed-form solution
a
https://orcid.org/0000-0001-9014-681X
b
https://orcid.org/0000-0002-3740-352X
c
https://orcid.org/0000-0002-6992-0572
d
https://orcid.org/0000-0003-1658-9166
of the multidimensional mechanical impedance sys-
tem based on theory of mechanical vibrations (Sal-
darriaga et al., 2022a) allow us to analyze and syn-
thesize the dynamics of the robot in a proper manner.
Recent work on mechanisms using physical variable
mechanical impedance elements (Vanderborght et al.,
2013; Memar and Esfahani, 2018), have encouraged
and given more relevance to the joint space analy-
sis of robotic systems, making them more computa-
tionally efficient (Yu et al., 2019; Laffranchi et al.,
2014). However, the main problem of this joint space
analysis is the correct spatial transformation between
Cartesian and joint spaces.
Although there is plenty of work on handling and
design of non-diagonal stiffness matrices (Caccavale
et al., 1999; Caccavale et al., 1998), and non-diagonal
dominant inertia matrices for robotic impedance con-
trol (Pollayil et al., 2023), to the best of our knowl-
edge, there is no work on off-diagonal elements for
damping matrices.
Our methodology also allows us to select the el-
ements of both stiffness and damping matrices, so
that a desired dynamic behavior of the robot can be
obtained. This tool can also be used to select off-
diagonal values in the damping matrices to further im-
158
Saldarriaga, C., Patiño, J., Helguero, C. and Kao, I.
Joint-Based Robotic Impedance Control Transformations: An Experimental Study.
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 158-165
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
prove the damping ratios of the system in the modal
space. The main advantages of our methodology in-
clude: (1) it can be used without losing generality;
and (2) no assumptions of symmetry property of the
involved matrices are made. This method is particu-
larly useful for redundant manipulators.
A spatial transformation of both stiffness and
damping was derived mathematically in (Saldarriaga
et al., 2022b), which showed that damping in the
Cartesian space is actually involved in the compu-
tation of stiffness in the joint space, along with the
term from the conservative congruence transforma-
tion (Chen and Kao, 2000). An experimental study is
proposed in this paper to show how this coupling term
between stiffness and damping in the spatial trans-
formation equation is important and can be beneficial
and stabilizing in Cartesian impedance control tasks.
This paper is structured as follows: all the dy-
namics preliminaries and general control equations
are presented in Section 2. After that, the mapping
equations for stiffness and damping parameters are
derived in Section 3. The dynamic response mod-
ulation methodology is explained in Section 4. The
experimental results are presented in Section 5, with
discussions and conclusion in Sections 6 and 7, re-
spectively.
2 IMPEDANCE CONTROL
The equation of motion of an n-DoF (degree of free-
dom) manipulator is given by
M(q)
¨
q(t) + G(q,
˙
q)
˙
q(t) + v(q) = τ
τ
τ
m
+ τ
τ
τ
ext
(1)
here the vector q contains the n joint variables, M is
the mass matrix, G is the matrix that contains the gy-
roscopic terms, v is the vector that compensates for
gravity, and τ
τ
τ
ext
is the vector with the external torque
values. To obtain a multi dimensional mass-damper-
spring behavior we choose the motor torques τ
m
as
[−K
q
q(t)−C
q
˙
q(t)+v(q)+G(q,
˙
q)
˙
q(t)], the system
in equation (1) becomes
M(q)
¨
q(t) + C
q
˙
q(t) + K
q
q(t) = τ
τ
τ
ext
(2)
where C
q
and K
q
are the damping and stiffness ma-
trices, respectively. The task space impedance control
is performed according to the equation:
M
C
(q)
¨
x(t) + C
C
˙
x(t) + K
C
x(t) = f (3)
where K
C
, C
C
, and M
C
are the stiffness, damping,
and mass matrices in the Cartesian space, correspond-
ingly, and f stands for the force in the Cartesian space.
A very common implementation of impedance
control is by imposing predefined stiffness and damp-
ing elements in the Cartesian space, then obtaining the
required joint torques based on the errors from posi-
tion and velocity with respect to the desired values,
and applying these torques by the kineto-static rela-
tionship
τ
τ
τ = J
T
f (4)
added with the compensation of gravity and gyro-
scopic terms, similar as in (Ott, 2008; Kao and Sal-
darriaga, 2023) and illustrated in Figure 1, where:
τ
τ
τ
c
= J
T
[K
C
(x −x
d
) + C
C
(
˙
x −
˙
x
d
)]
τ
τ
τ = τ
τ
τ
c
+ τ
τ
τ
G
and τ
τ
τ
G
is the compensation of gravity and nonlinear
terms.
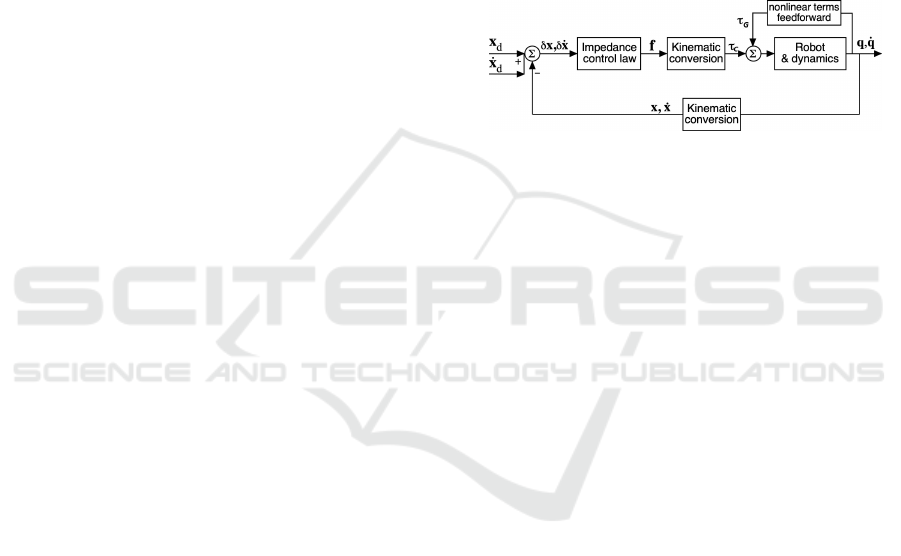
Figure 1: Block diagram of the Cartesian impedance con-
troller.
The “Impedance control law” block in Figure 1
implements Equation (3) with the Cartesian force as
the output. After the kinematic conversion block, the
torque from impedance control law becomes τ
τ
τ
c
. The
nonlinear terms of the dynamic equation of motion
are canceled by using a feedforward term τ
τ
τ
G
, which
is obtained from Equation (1), based on the current
robot configuration.
On the other hand, one can also implement
impedance control based directly on the joint space
(joint-based impedance control). In this case, instead
of obtaining and controlling f in Cartesian space and
then transforming to torques via equation (4), the
desired positions and its derivatives as well as the
impedance parameters are given or computed directly
in the joint space. An analysis and controller based
on the joint space was needed in order to perform
modal analysis of the redundant robot, where stiffness
and damping become singular, and the only way to
deal with this type of systems is by separating out the
zero-potential energy (ZP) and non-zero-potential en-
ergy (NZP) modes of motion, using our methodology.
This analysis allows us to obtain the torques directly
in the joint space of the robot without losing gener-
ality. This analysis carried out in the joint space lets
modulate the dynamic response of the robot through
the impedance parameters directly at the joint level of
the robot. The torque, τ
τ
τ
c
, in this case is now
τ
τ
τ
c
= K
q
(q −q
d
) + C
q
(
˙
q −
˙
q
d
) (5)
Joint-Based Robotic Impedance Control Transformations: An Experimental Study
159

3 MAPPING BETWEEN THE
CARTESIAN AND JOINT
SPACES
In this section, we present the derivation of the map-
ping of stiffness and damping matrices from the
Cartesian space to the joint space for joint-based
impedance control (Saldarriaga et al., 2022b). A gen-
eralized definition of stiffness and damping can be
written as follows:
K =
∂f
∂x
(6)
C =
∂f
∂
˙
x
(7)
where f denotes the force. From the generalization of
a manipulator Jacobian matrix, we obtain
δx = J δq (8)
Taking derivative of (8) with respect to time through
the chain rule, we obtain as follows
d
dt
(δx) = J
d
dt
(δq) +
˙
Jδq (9)
From equations (6), (7) and (4) with a combined stiff-
ness and damping control law, we can write the fol-
lowing equations
δf = K
C
δx + C
C
d
dt
(δx) (10)
δτ
τ
τ = K
q
δq + C
q
d
dt
(δq) (11)
δτ
τ
τ = δJ
T
f + J
T
δf (12)
Substitute equations (10) and (11) into (12) to render
δτ
τ
τ = δJ
T
f + J
T
K
C
δx + C
C
d
dt
(δx)
(13)
K
q
δq +C
q
d
dt
(δq) = δJ
T
f +J
T
K
C
δx +J
T
C
C
d
dt
(δx)
(14)
Substituting equations (8) and (9) into (14), we obtain
K
q
δq + C
q
d
dt
(δq) = δJ
T
f + J
T
K
C
Jδq
+ J
T
C
C
J
d
dt
(δq) +
˙
Jδq
(15)
K
q
δq + C
q
d
dt
(δq) = δJ
T
f + J
T
K
C
Jδq
+ J
T
C
C
J
d
dt
(δq) + J
T
C
C
˙
Jδq
(16)
Since we know that J is a function of q but not
˙
q, we
can rearrange δJ
T
f and get
K
G
δq =
∂J
T
∂q
1
f
∂J
T
∂q
2
f
...
∂J
T
∂q
n
f
δq (17)
This K
G
term represents the changes in geometry un-
der the presence of external forces (Chen and Kao,
2000).
From equation (16), we can obtain the joint stiff-
ness and damping matrices (K
q
, C
q
) by prescribed
matrices in the Cartesian space (K
C
, C
C
)
K
q
= J
T
K
C
J + K
G
+ K
B
(18)
C
q
= J
T
C
C
J (19)
where K
B
= J
T
C
C
˙
J, it represents the changes in ge-
ometry due to the apparent velocity created, which
generates an apparent stiffness matrix due to the
damping matrix in impedance control. Mathemati-
cally, this term comes from the δq part of the equa-
tions, and contains the derivative of J with respect to
time. For the rest of the paper, we refer to the first
term on the right hand side of the equal sign in equa-
tion (18), J
T
K
C
J, as the ‘classical’ or ‘incomplete’
transformation of stiffness.
Equations (18) and (19) describe the complete
mapping of stiffness and damping of impedance con-
trol from the Cartesian space to the joint space, mak-
ing equations (2) and (3) equivalent to each other. The
matrices in the Cartesian space can be obtained with
prescribed matrices in the joint space:
K
C
=
J
T
∗
(K
q
−K
G
−K
B
)J
∗
(20)
C
C
=
J
T
∗
C
q
J
∗
(21)
The superscript ‘*’ in equations (20) and (21) repre-
sents the generalized inverse of the manipulator Ja-
cobian J, which is not square in case of redundancy
(n > m) (Siciliano et al., 2010). Equations (18)-(21)
form the “complete” mapping of impedance control
between Cartesian and joint space. A convenient,
derivative-free way of obtaining the extra terms in the
stiffness transformation is by the screw-based Jaco-
bian J (Muller, 2014).
4 DYNAMIC RESPONSE
MODULATION THROUGH THE
USE OF DAMPING
A very common way to select the damping parame-
ters of impedance control is by a trial-and-error prac-
tice, with endless possibilities. In addition to being
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
160

cumbersome and a blind guess practice, this trial-
and-error process can lead to undesired level of joint
torques and highly unstable and dangerous systems.
Furthermore, the trial-and-error process ignores the
influence of the values of one damping parameter of
the damping matrix on the others and the overall re-
sponse. Instead, we propose to analyze the control
criteria of the system in a modal space (Meirovitch,
2001) to regulate the dynamic response. As shown
in (Saldarriaga et al., 2022a), once the system in equa-
tion (2) becomes positive definite (after the redundant
ZP mode(s) is removed), the solution of dynamic re-
sponse in the joint space is derived by using the linear
system theory, with the following linear system equa-
tion
˙
z(t) = A z(t)+Bτ
τ
τ
ext
(t) (22)
where
A =
0 I
−M
−1
K
q
−M
−1
C
q
, B =
0
M
−1
(23)
The solution of equation (22) assumes the following
form
z(t) =
q(t)
˙
q(t)
= Xe
Λ
Λ
Λt
Y
T
z(0)
+
Z
t
0
Xe
Λ
Λ
Λτ
Y
T
Bτ
ext
(t −τ)dτ (24)
where X and Y are the right and left eigenvectors of
the matrix A, and Λ
Λ
Λ is a diagonal matrix with all the
eigenvalues of A.
The details of the methodology for one redundant
DoF can be found in (Saldarriaga et al., 2022a). We
can obtain every damping ratio ζ
i
, corresponding to
every eigenvalue (mode) of the A matrix, and we
can improve them in a theoretically sound system-
atic manner by selecting proper elements of stiffness
and damping. By performing a parameter study of
each element of the damping matrix, we can analyze
and determine the elements (diagonal or off-diagonal)
that have most effect on the dynamic response and
specifically on which modes. Thus, we can choose
stiffness and damping parameters to modulate the dy-
namic response in a deterministic manner, without
any assumptions or trial and error.
5 EXPERIMENTS
For a given starting configuration q
0
=
[0;−π/4; 0;−3π/4; 0;π/2; π/4]rad of the Panda
robot, a circular path is commanded at the end-
effector level (m = 6) for 13 seconds at a constant
speed for several cycles with a specified set of Carte-
sian stiffness and damping parameters, K
C
and C
C
,
respectively, using joint-based impedance control.
This circle is in the XY Cartesian space, as shown
in Fig 2. At each iteration the inverse kinematics
function of the Panda controller obtains a desired
robot joint configuration based on the intended path,
as the robot moves along this plane. The Jacobian
matrix J also changes, which has an impact on the
joint stiffness and damping matrices K
q
and C
q
,
respectively, with the prescribed K
C
and C
C
in the
Cartesian space, as shown in equations (18) and (19).
Figure 2: 7 DoF Panda robot used in the experiments.
For these experiments, given that no external
forces are being applied (other than the torques gener-
ated by the robot joints itself), we are going to neglect
the computation of the K
G
term in equation (18), and
will focus on the importance of the K
B
term on both
the stiffness transformation and the intended robotic
task in the Cartesian space in two different situations:
(1) arbitrary or trial-and-error damping, and (2) di-
agonal proper damping. From a higher perspective,
impedance control is a trade-off or compromise be-
tween force control and position control, we chose to
test it by tracing a prescribed trajectory, to some ex-
tent similar to position control without external forces
maintaining a mechanical compliance level.
The chosen Cartesian stiffness
matrix for the robotic task was
K
C
=diag(3000,5000, 12000,100,150,100) in
SI units for both position and orientation.
Joint-Based Robotic Impedance Control Transformations: An Experimental Study
161
5.1 Arbitrary Damping Matrix
Another common practice to select a set of damping
parameters in a robotic system performing impedance
control is to assume a diagonal mass matrix M and
impose C
C1
= 2
√
K
C
(similar to the impedance ex-
ample code provided by the manufacturer). As we
can see in the Appendix, the mass matrix is far from
being diagonal. For this case, the Panda robot became
highly unstable once we used this arbitrary damping
matrix C
C1
. Torques and velocities in the joints can
become out of range with bifurcation, the actuators
cannot keep up with the controller. The robot can
crash with no data being collected.
0 2 4 6 8 10 12
-50
0
50
x(mm)
0 2 4 6 8 10 12
0
20
40
60
y(mm)
0 2 4 6 8 10 12
0
5
10
z(mm)
class only
class + Kb
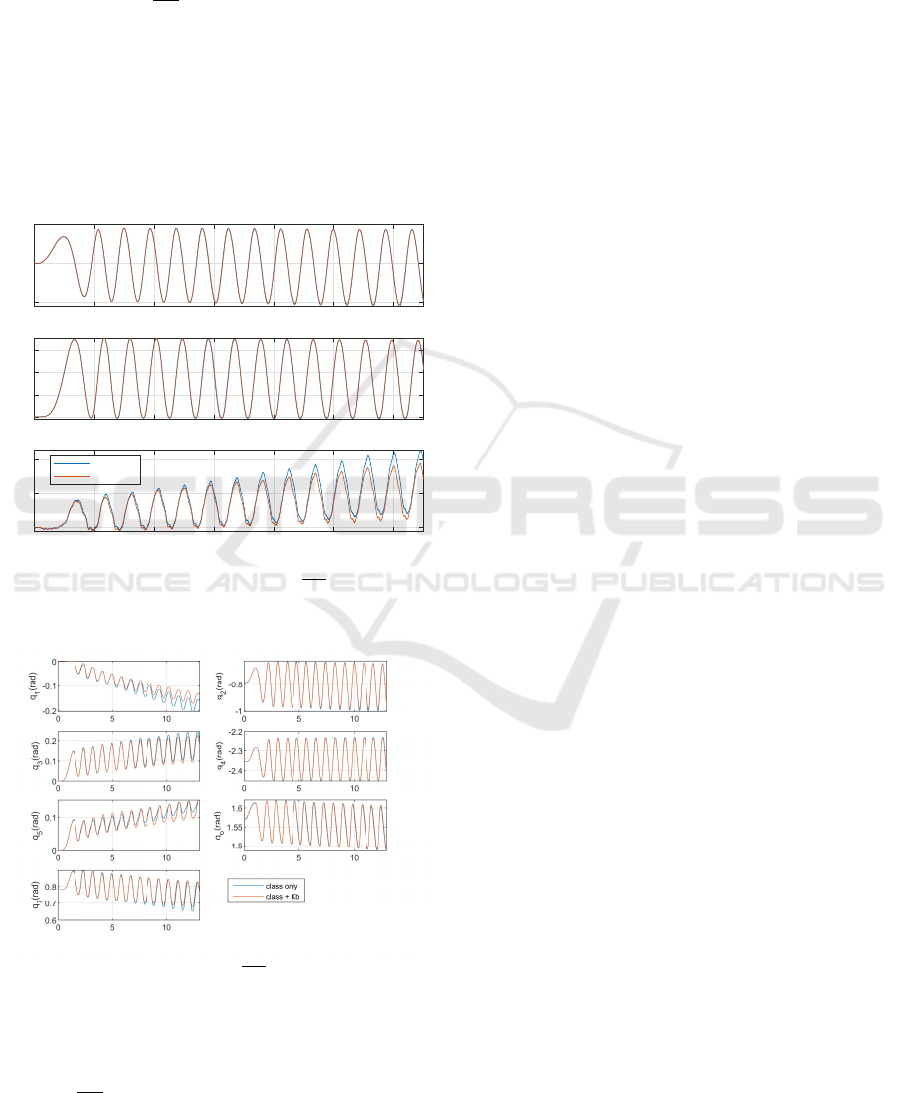
Figure 3: Results in the Cartesian space using an arbitrary
choice of damping matrix with C
C2
=
√
K
C
. Comparison
between the classical (in blue) and equation (18) with K
B
term (in red).
Figure 4: Results of joint angles using an arbitrary choice
of damping matrix with C
C2
=
√
K
C
. Comparison between
the classical (in blue) and equation (18) with K
B
term (in
red).
Another arbitrary damping matrix was chosen
with half of the values of the previous choice with
C
C2
=
√
K
C
. The experimental results of the Carte-
sian positions are plotted in Figure 3 for multiple cy-
cles. Since the displacement is intended in the XY
plane, the displacement in the Z direction should be
very small, but this is clearly not the case, and gets
worse over time. The joint angles are plotted in Fig-
ure 4. The joint angles are drifting with multiple
cycles of movement, and significantly affecting the
Cartesian positions. The addition of K
B
using equa-
tion (18) helps in reducing or stabilizing the response
but it is not ideal due to the selection of this arbitrary
damping matrix.
5.2 Appropriately Chosen Damping
Matrix
As explained in Section 4, the diagonal damping pa-
rameters are chosen keeping in mind the effect that
each element has on each of the damping ratios and
natural frequencies in the modal space once the re-
dundancy of the robot or ZP mode (Saldarriaga et al.,
2022a) is taken care of, without imposing high val-
ues of damping matrix that lead to over-damped or
very slow motions. After a parameter study of the
elements of C
C
, the chosen diagonal damping ma-
trix was C
C
=diag(20,30, 40,12,22,0.75) in SI units
for both position and orientation. This set of stiffness
and damping matrices generates the following damp-
ing ratios and natural frequencies in the modal space:
ζ
ζ
ζ =
0.089
0.20
0.26
1+
1+
0.68
; ω
ω
ω
n
=
49.1
15.0
31.8
−
−
179
rad/s
the overdamped pairs correspond to the overdamped
roots, where ζ ≥ 1.
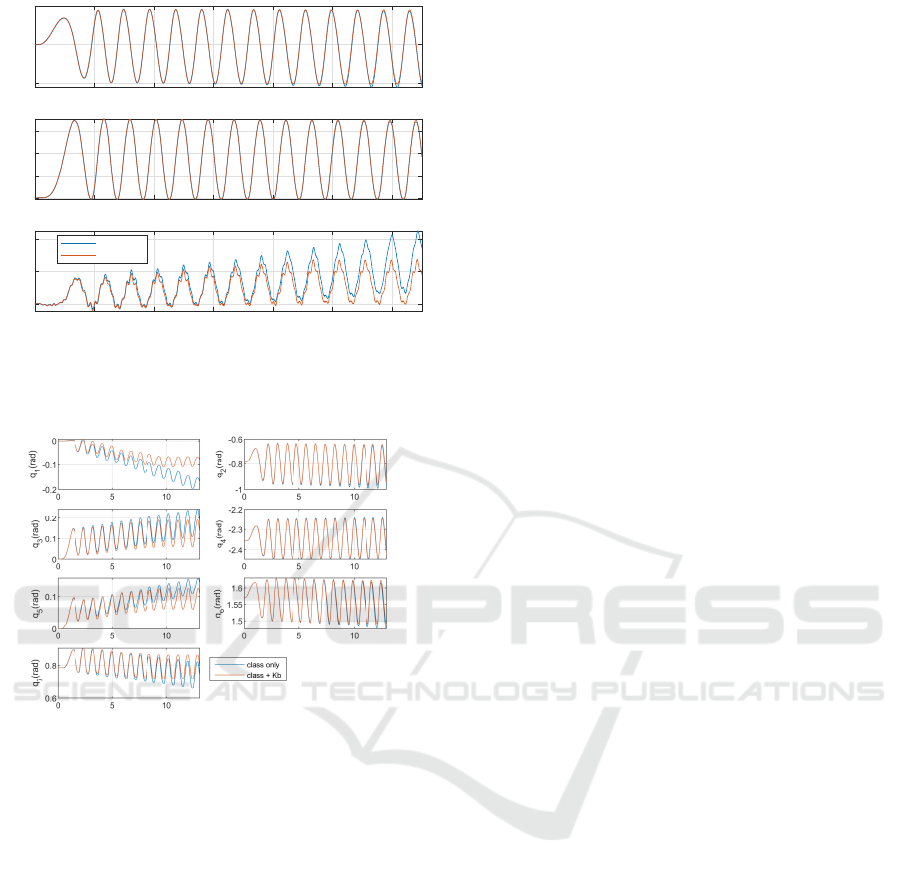
From Figures 5 and 6 we can see how the response
of the robot is improved; especially, there is signif-
icantly less drift at the joints when the K
B
term is
included. In addition, more acceptable movement in
the Z direction is found with K
B
term. However, the
damping ratio of mode 1-2 is still low and might yield
better results when increased.
6 DISCUSSIONS
Equations (18) and (19), derived mathematically to
provide a transformation of stiffness and damping
matrices of impedance control between the Cartesian
and joint spaces, enable us to correctly compute the
stiffness and damping matrices in the joint space. As
shown in the experiments in Section 5, the classical
incomplete transformation leads to torque errors that
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
162
0 2 4 6 8 10 12
-50
0
50
x(mm)
0 2 4 6 8 10 12
0
20
40
60
y(mm)
0 2 4 6 8 10 12
0
5
10
z(mm)
class only
class + Kb
Figure 5: Results in the Cartesian space using an appro-
priately chosen diagonal damping matrix C
C
. Comparison
between the classical (in blue) and equation (18) with K
B
term (in red).
Figure 6: Results of joint angles using an appropriately
chosen diagonal damping matrix. Comparison between the
classical (in blue) and equation (18) with K
B
term (in red).
have a negative impact on a robotic impedance task.
On the other hand, including the coupling term K
B
in
the transformation equation yields a better dynamic
response, which quickly settles down after a transition
period. In comparison, the classical or incomplete
transformation leads to a joint response that drifts in-
definitely.
Based on the fundamental differential mathemat-
ics and the use of the chain rule, we derived the
transformation equation (18) for stiffness including a
term that involves the damping matrix in the Carte-
sian space and the derivative of the Jacobian matrix. It
showed up in the stiffness because of the apparent ve-
locity due to the change in Jacobian, which creates an
equivalent term of apparent damping in stiffness. This
apparent velocity due to the change in Jacobian is not
an actual physical velocity; hence, it does not gener-
ate a dissipative effect, and the conservative property
of stiffness is maintained.
Equations (22) to (24) are used to obtain the dy-
namic response of the system under impedance con-
trol. The methodology employed to select the indi-
vidual elements of the damping matrix enables us to
modulate the dynamic response, provided by equa-
tion (24), by changing the damping ratios in the modal
space of the system matrix A in equation (23) (Saldar-
riaga et al., 2022a). It is very important to maintain
stability by ensuring that none of the eigenvalues of
the modal space are in the right-half part of the com-
plex plane.
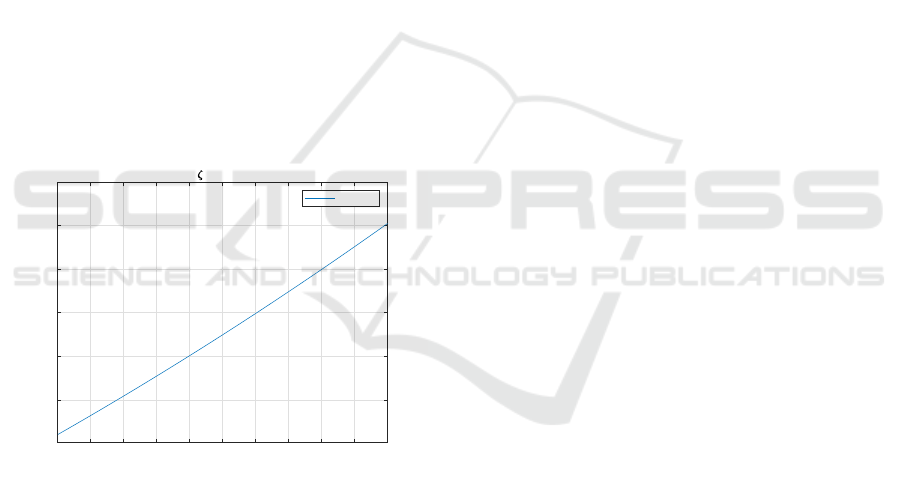
Employing the parameter study, we found that
also the off-diagonal elements can be used to increase
even more the intended damping ratio. For example,
looking at Subsection 5.2, the damping ratio corre-
sponding to mode 1-2 increases when increasing the
element (3,5) of the damping matrix C
C
, as shown in
Figure 7.
If we choose the element (3,5) of the Cartesian damp-
ing matrix C
C
to be 55, we obtain the following damp-
ing ratios and natural frequencies in the modal space:
ζ
ζ
ζ =
0.1037
0.20
0.26
1+
1+
0.68
; ω
ω
ω
n
=
51.6
15.1
31.8
−
−
179
rad/s
In case of working with non-symmetric matrices,
either C
C
or K
C
, or both, we need to make sure that
the positive-definiteness is always maintained. For
any K
1
matrix, the condition: y
T
1
K
1
y
1
> 0 must be
held for all y
1
∈ ℜ
n×1
(Strang, 2009) to ensure a pos-
itive definite K
1
matrix. Note that when imposing cer-
tain off-diagonal values in C
C
, this condition may not
be satisfied and a more careful selection of parame-
ters needs to be done, which can also be accounted
for when generating the sets of parameter study using
our methodology.
Positive-definiteness is a property that has not
been extensively studied on Non-symmetric matri-
ces, similar to the one in the case of element (3,5)
of the damping matrix. It is known that obtaining
positive eigenvalues is a sure consequence of deal-
ing with positive definite real matrices. That is pre-
cisely a characteristic of the non-diagonal matrix cho-
sen in the experimental work, the eigenvalues of the
reduced damping matrix are all positive (λ
λ
λ=[1.316
7.289 8.514 14.65 23.18 8515248]), which brings the
stability and consistency needed for the system. This
can only be accounted for by using our methodology.
We also saw how the Cartesian stiffness val-
ues, especially in X and Y (3000 and 5000, which
were chosen for illustration and generalization pur-
poses only), affect the actual displacement of the end-
Joint-Based Robotic Impedance Control Transformations: An Experimental Study
163
effector, regardless of the intended circular path for
the impedance task.
As counterintuitive as it may sound, using higher
damping parameters does not necessarily mean that
the resulting damping ratios become higher as well.
This is clearly one of the main advantages of using the
proposed methodology to determine exactly which el-
ement needs to be increased to modulate the damping
behavior of the system.
One of the assumptions made in the analysis and
implementation is that the changes in the Jacobian
matrix J are relatively small, which to some extent
and for the experiments performed here it might work
relatively fine, but once the displacements become
larger, as expected from theory, the damping matrix
can no longer be kept constant for a given task. The
feature of an analytically obtained, time and configu-
ration dependent damping matrix tackling this limita-
tion is part of our current work.
The apparent stiffness term, K
B
in the stiffness
transformation equation (18), involving the damping
matrix has a stabilizing effect in the response of the
robot performing impedance control, as it contains in-
formation on how the Jacobian matrix with configu-
ration changes over time.
0 10 20 30 40 50 60 70 80 90 100
Cc
0.095
0.1
0.105
0.11
0.115
Damping ratio
(Cc(3,5))
mode 1-2
Figure 7: Parameter study of the (3,5) element of C
C
.
Damping ratio in the modal space as a function of the el-
ement (3,5) of the Cartesian damping matrix C
C
.
In the present study we have found an unexpected
drift in the experimental results for the Z direction,
which given the relatively large stiffness value in that
Cartesian direction, should not be there. We saw that
the drift is larger and more evident in the cases that do
not consider the coupling term, further investigation
and considerations must be given to this result, and it
is also part of our future work.
7 CONCLUSION
In this paper, we derived the equations to transform
stiffness and damping matrices in impedance control
between the Cartesian and joint spaces and show ex-
perimentally the effectiveness of the proposed theory,
in comparison with the incomplete classic transfor-
mation. We also demonstrated that the stiffness ma-
trix term, K
B
, derived mathematically due to the ap-
parent velocity from the change in Jacobian matrix
in manipulation under impedance control, is very im-
portant and has a stabilizing effect in manipulation
and motion for the robotic manipulator. In addition,
the solution methodology based on the linear system
theory allows us to modulate the dynamic response
of the system by increasing the damping ratios in
the modal space, through the change of symmetric
and non-symmetric elements of the damping matrix
in impedance control.
REFERENCES
Caccavale, F., Siciliano, B., and Luigi, V. (1998).
Quaternion-based impedance with nondiagonal stiff-
ness for robot manipulators. volume 1, pages 468 –
472 vol.1.
Caccavale, F., Siciliano, B., and Villani, L. (1999). Robot
impedance control with nondiagonal stiffness. IEEE
Transactions on Automatic Control, 44(10):1943–
1946.
Chen, S.-F. and Kao, I. (2000). Conservative congruence
transformation for joint and cartesian stiffness matri-
ces of robotic hands and fingers. The International
Journal of Robotics Research, 19(9):835–847.
Hogan, N. (1985). Impedance control: An approach to ma-
nipulation: part i - theory, part ii - implementation,
part iii - applications. Journ. of Dyn. Systems, Mea-
surement and Control, 107(1):1–24.
Kao, I. and Saldarriaga, C. (2023). Manipulation(to be pub-
lished). In Siciliano, B., editor, Springer Handbook of
Robotics, MOOCS. Springer, Berlin, Heidelberg.
Khatib, O. (1987). A unified approach for motion and force
control of robot manipulators: The operational space
formulation. IEEE Journal on Robotics and Automa-
tion, 3(1):43–53.
Laffranchi, M., Chen, L., Kashiri, N., Lee, J., Tsagarakis,
N., and Caldwell, D. (2014). Development and control
of a series elastic actuator equipped with a semi active
friction damper for human friendly robots. Robotics
and Autonomous Systems, 62(12):1827 – 1836.
Meirovitch, L. (2001). Fundamentals of Vibrations.
McGraw-Hill.
Memar, A. H. and Esfahani, E. T. (2018). A variable stiff-
ness gripper with antagonistic magnetic springs for
enhancing manipulation. In Robotics: Science and
Systems.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
164

Muller, A. (2014). Higher derivatives of the kinematic map-
ping and some applications. Mechanism and Machine
Theory, 76:70 – 85.
Ott, C. (2008). Cartesian Impedance Control of Redundant
and Flexible-Joint Robots. Springer Publishing Com-
pany, Incorporated, 1 edition.
Pollayil, M. J., Angelini, F., Xin, G., Mistry, M., Vijayaku-
mar, S., Bicchi, A., and Garabini, M. (2023). Choos-
ing stiffness and damping for optimal impedance plan-
ning. IEEE Transactions on Robotics, 39(2):1281–
1300.
Saldarriaga, C., Chakraborty, N., and Kao, I. (2022a).
Damping selection for cartesian impedance control
with dynamic response modulation. IEEE Transac-
tions on Robotics, 38(3):1915–1924.
Saldarriaga, C., Chakraborty, N., and Kao, I. (2022b). Joint
space stiffness and damping for cartesian and null
space impedance control of redundant robotic manip-
ulators. In Asfour, T., Yoshida, E., Park, J., Chris-
tensen, H., and Khatib, O., editors, Robotics Research,
pages 410–426, Cham. Springer International Pub-
lishing.
Siciliano, B., Sciavicco, L., Villani, L., and Oriolo, G.
(2010). Robotics: Modelling, Planning and Control.
Advanced Textbooks in Control and Signal Process-
ing. Springer London.
Strang, G. (2009). Introduction to Linear Algebra.
Wellesley-Cambridge Press, fourth edition.
Vanderborght, B., Albu-Schaeffer, A., Bicchi, A., Burdet,
E., Caldwell, D., Carloni, R., Catalano, M., Eiberger,
O., Friedl, W., Ganesh, G., Garabini, M., Grebenstein,
M., Grioli, G., Haddadin, S., Hoppner, H., Jafari, A.,
Laffranchi, M., Lefeber, D., Petit, F., Stramigioli, S.,
Tsagarakis, N., Damme, M. V., Ham, R. V., Visser,
L., and Wolf, S. (2013). Variable impedance actua-
tors: A review. Robotics and Autonomous Systems,
61(12):1601 – 1614.
Villani, L. and De Schutter, J. (2008). Force control. In
Siciliano, B. and Khatib, O., editors, Springer Hand-
book of Robotics, pages 161–185. Springer, Berlin,
Heidelberg.
Yu, J., Zhao, Y., Chen, G., Gu, Y., Wang, C., and Huang,
S. (2019). Realizing controllable physical interaction
based on an electromagnetic variable stiffness joint.
Journal of Mechanisms and Robotics, 11(5):054501.
APPENDIX
The Jacobian and mass inertia matrices of the Panda
robot at the starting configuration used for the analy-
ses were:
J(q) =
−0.0002 0.1525 −0.0001 0.1293 0 0.2106 0
0.3066 0 0.3247 0.0001 0.2104 −0.0001 0
0 −0.3066 −0.0002 0.4717 0.0001 0.0875 0
0 0.0001 −0.7070 0 1 0 −0.0025
0 1 0.0001 −1 0 −1 0.0007
1 0 0.7072 0.0001 −0.003 −0.0007 −1
M(q) =
0.5031 −0.006 0.4756 −0.0024 0.0527 −0.0005 −0.0028
−0.006 1.5460 −0.0225 −0.6848 −0.0078 −0.0335 −0.0009
0.4756 −0.0225 0.9674 −0.0146 0.0615 0.0007 −0.0034
−0.0024 −0.6848 −0.0146 0.9442 0.0208 0.1187 0.0012
0.0527 −0.0078 0.0615 0.0208 0.0229 −0.0015 0.0021
−0.0005 −0.0335 0.0007 0.1187 −0.0015 0.0444 0.0013
−0.0028 −0.0009 −0.0034 0.0012 0.0021 0.0013 0.003
Joint-Based Robotic Impedance Control Transformations: An Experimental Study
165
