
Hand Gesture Interface to Teach an Industrial Robots
Mojtaba Ahmadieh Khanesar
a
and David Branson
Faculty of Engineering, NG7 2RD, Nottingham, U.K.
Keywords: Image Recognition, MediaPipe, Gesture Recognition, Industrial Robot Control, Inverse Kinematics.
Abstract: The present paper proposes user gesture recognition to control industrial robots. To recognize hand gestures,
MediaPipe software package and an RGB camera is used. The proposed communication approach is an easy
and reliable approach to provide commands for industrial robots. The landmarks which are extracted by
MediaPipe software package are used as the input to a gesture recognition software to detect hand gestures.
Five different hand gestures are recognized by the proposed machine learning approach in this paper. Hand
gestures are then translated to movement directions for the industrial robot. The corresponding joint angle
updates are generated using damped least squares inverse kinematic approach to move the industrial robot in
a plane. The motion behaviour of the industrial robot is simulated within V-REP simulation environment. It
is observed that the hand gestures are communicated with high accuracy to the industrial robot and the
industrial robot follows the movements accurately.
1 INTRODUCTION
According to ISO 8373:2021 human–robot
interaction (HRI) is information and action
exchanges between human and robot to perform a
task by means of a user interface (Standardization
2021). With ever-increasing degree of flexibility
within an industry 4.0 settings to produce highly
customizable products, it is required to have a flexible
shop floor (Burnap, Branson et al. 2019, Lakoju,
Ajienka et al. 2021). Such a flexible shop floor may
be obtained using robust machine learning
approaches to train the factory elements. One of the
dominant factory elements are industrial robots. It is
highly desirable to train industrial robot for new
recipes and procedure required for product changes.
Various types of industrial robots programming
approaches can be identified in industrial
environment (Adamides and Edan 2023). Most
industrial robots benefit from teaching pendant which
benefits from arrow keys as well as programming
interface to program industrial robots. Some tools to
control the industrial robot within Cartesian space and
joint angle space exist within a teaching pendant.
Lead through training (Choi, Eakins et al. 2013, Sosa-
Ceron, Gonzalez-Hernandez et al. 2022) of industrial
robots may exist within teaching pendant options to
a
https://orcid.org/0000-0001-5583-7295
program it. PC interfaces to train industrial robots
through Python (Mysore and Tsb 2022), C++, and
Matlab (Zhou, Xie et al. 2020) may be provided using
their corresponding APIs. However, more convenient
approaches to provide an intuitive human robot
interface are highly appreciable.
Different human robot interface approaches are
proposed to provide an intuitive interface between
human and robot. In this paper gesture recognition
because of its ease of learning is chosen to train
industrial robots. To recognize hand landmarks,
MediaPipe package is used. The landmarks gathered
in real-time using a low-cost camera are further
processed to identify hand gestures. Totally five hand
gestures representing movements in four directions
plus stop command are identified using the proposed
approach. The commands are movement command
which make the robot move in any of four directions
on a plane at a constant speed. The gesture commands
are then translated in terms of joint angle movements
using damped least-squares inverse kinematics
approach. It is observed that using this approach, it is
possible to move industrial robots in four directions.
The tracking error obtained using the proposed
approach demonstrates that the reference command
given by hand gesture is followed with high
performance within the simulation environment.
Khanesar, M. and Branson, D.
Hand Gesture Interface to Teach an Industrial Robots.
DOI: 10.5220/0012205200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 243-249
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
243
This paper is organized as follows: the forward
kinematics of industrial robot is presented in Section
II. Section III presents hand gesture recognition
procedure. Experimental setups and results are
provided in Section IV, and V, respectively.
concluding remarks are presented in Section VI. The
acknowledgement part and the references are provided
in Sections VII and VIII.
2 INDUSTRIAL ROBOT
FORWARD KINEMATICS AND
INVERSE KINEMATICS
Forward kinematics is a function which operates on
the robot joint angle and results in its position and
orientation. Inverse kinematics is the reverse process
to identify the joint angles of a robot from its position
and orientation. Damped least squares approach
(Boucher, Laliberté et al. 2019, Tang and Notash
2021) is a computational inverse kinematics approach
used in this paper. This inverse kinematic approach
with geometrical forward kinematics methods is
summarized in this Section.
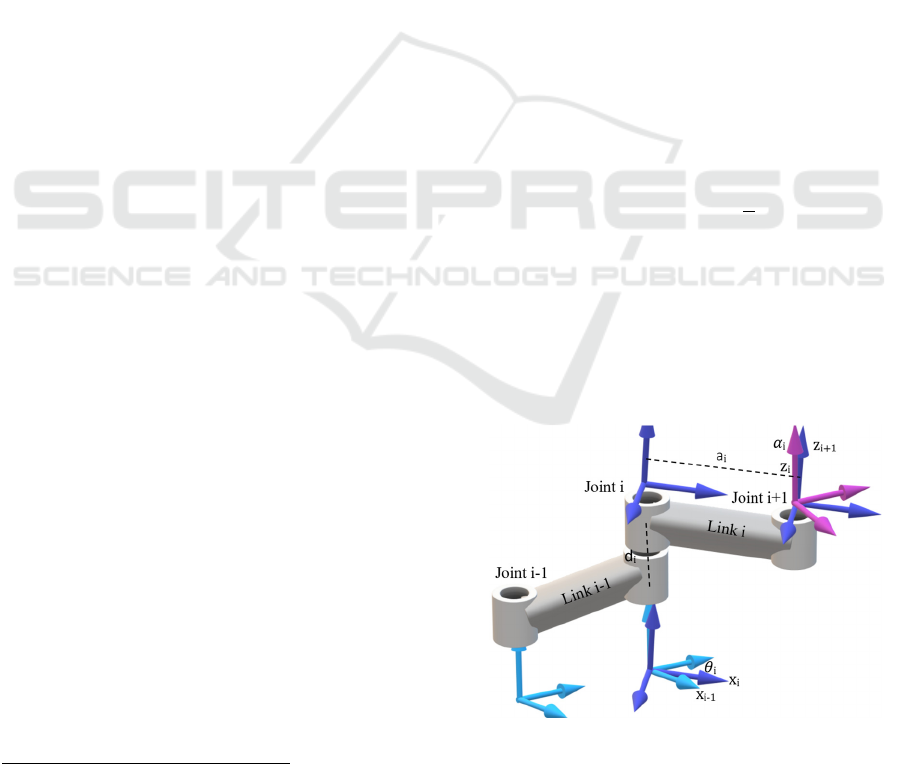
2.1 Industrial Robot Dh Parameters
Serial industrial robots are investigated in this paper.
A serial industrial robot which benefits from n
number of joints has n+1 number of links connecting
joints together. Each joint is identified with its local
coordinate. Four geometrical parameters are used to
describe the spatial relationship between successive
link coordinate frames in a DH system (Li, Wu et al.
2016). The four parameters in a DH system which are
presented in Fig. 1 are joint angle
, link offset
,
link length
, and link twist
.
• Joint angle
: the angle between
and
axes about the
axis
• Link offset
: the distance from the origin of
frame −1 to the
axis along the
axis
• Link length
: is the distance between the
and
axis along the
axis; for intersecting
axis is parallel to
;
• Link twist
: is the angle between the
and
axes about the
axis.
1
https://www.universal-robots.com/articles/ur/application
-installation/dh-parameters-for-calculations-of-kinematic
s-and-dynamics/ (visited: 1/5/2022)
2.2 Industrial Robot DH
Parameters
Joint angle measurements using the rotary encoder
sensors on joint shafts are used as the input to
industrial robot FK to express the Cartesian
coordinates of robot within its 3D workspace. The
link transformation matrix from the link -1 to the
link using its DH parameters depends on the
corresponding joint angle of the industrial robot and
its D-H parameters (Kufieta 2014, Sun, Cao et al.
2017).
=
−
−
0
00 01
(1)
where
′,=1,…,6 represent the joint angle ,
′,=1,…,6,
′,=1,…,6, and
,=1,…,6
present other DH parameters of robot (see Fig. 1).
Furthermore,
,
,
,and
,=1,...6
represent
,
,
, and
,=
1,...,6, respectively. Overall robot transformation
matrix in robot base coordinates is obtained as
follows.
=
=
(2)
The values of
’s is given as follows.
=
=−
=
2
=
=
=0
(3)
The 3D end effector coordinates are obtained as
follows, the numerical DH parameter values
according to the robot manufacturer are as follows
1
.
=0.08916,
=−0.425,
=−0.392,
=0.1092,
=0.0947,
=0.0823
(4)
Figure 1: DH parameters.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
244

Furthermore,
=
=0, and
=0,=1,4,5,6.
2.3 IK Model of UR5
To control an industrial robot, it is required to use
inverse kinematic (IK) algorithm for the desired
position and orientation of the robot to find its joint
angle values. There exist different inverse kinematic
approaches. Geometrical inverse kinematics damped
least square approaches, and deep learning algorithms
for IK are among top algorithms used to solve the
inverse kinematic problems of industrial robots.
Among these inverse kinematic approaches, DLS
algorithm is widely used with V-REP software. This
algorithm uses the pseudo inverse method to find the
relationship between the cartesian space velocity and
the increment in robot joint angles.
=
∆
(5)
where
is the cartesian space velocity vector of the
robot, ∆ is the joint angle increment in the robot
joints, and is the Jacobian of the industrial robot. To
find the inverse kinematics equation, we have:
∆=
(6)
where
is the pseudo-inverse of the Jacobian matrix
of the system. Hence using DLS, the IK problem is
formulated as a minimization problem as follows.
∆
∆−
0
(7)
The solution to this optimization problem is obtained
as follows.
∆=
+
(8)
Using this equation, it is possible to calculate the
required increment within the industrial robot joint
angles to control the industrial robot towards its
desired position. This algorithm is available as a built-
in algorithm within V-REP and is utilized within this
paper.
3 HAND GESTURE
RECOGNITION
The preferred HRI method used in this paper is hand
gesture recognition technique. This method is
summarized in this section. To perform hand gesture
recognition, OpenCV is used for image preprocessing
such as filtering, and resizing. The filtered and resized
hand image is then processed by MediaPipe software
to extract hand landmarks. The angle of the hand is
then extracted from the landmarks which is then used
to detect hand gestures. The five hand gestures
recognized by this approach are then used to move the
industrial robot on a 2D plane. To translate the robot
movements to robot joint angles DLS inverse
kinematic approach as summarized in Section 2.3 is
used.
3.1 Open-Source Computer Vision
Library (OpenCV)
Open-source computer vision library (OpenCV) is a
computer vision program originally developed in
1999. Further upgrades on this library occurred in
2009 as OpenCV2 and 2015 as OpenCV3 (Culjak,
Abram et al. 2012). This software has been tested
successfully tested under different operating systems
including Windows, Linux, Mac, and ARM. OpenCV
can be used within academic applications as well as
industrial applications under BSD license. This
package benefits from live communications with
RGB and RGB-D cameras, processing images, pre-
processing functions, processing functions, functions
to add text and shapes to images, display options to
display processed camera feed in real time, and image
writing functions to save processed images as
pictures. This package can also be used under C++,
Python, and Matlab programming languages.
3.2 MediaPipe
MediaPipe is an open source perception framework
for applied machine learning pipeline to process
videos to detect some objects such as hands multiple
hands, whole body, face and their landmark (Halder
and Tayade 2021). This framework provides human
body landmark detection, hand and finger position
recognition, and face landmark recognition . To have
a robust machine learning framework, MediaPipe is
trained on the most diverse Google dataset.
Landmarks in an image processed by MediaPipe are
presented in terms of nodes on a graph generally
specified in pbtxt file format. The normalized three-
dimensional coordinates of these landmarks are given
by MediaPipe. The hand landmark generated by
MediaPipe is presented in Figure 2. Totally 21
landmarks are returned using MediaPipe. The names
of the landmarks returned from MediaPipe are as
follows. WRIST, THUMB_CMC, THUMB _MCP,
THUMB_IP, THUMB_TIP,
INDEX_FINGER_MCP, INDEX_FINGER_PIP,
INDEX_FINGER_DIP, INDEX_FINGER_TIP,
MIDDLE_FINGER_MCP, MIDDLE_FINGER_PIP,
Hand Gesture Interface to Teach an Industrial Robots
245
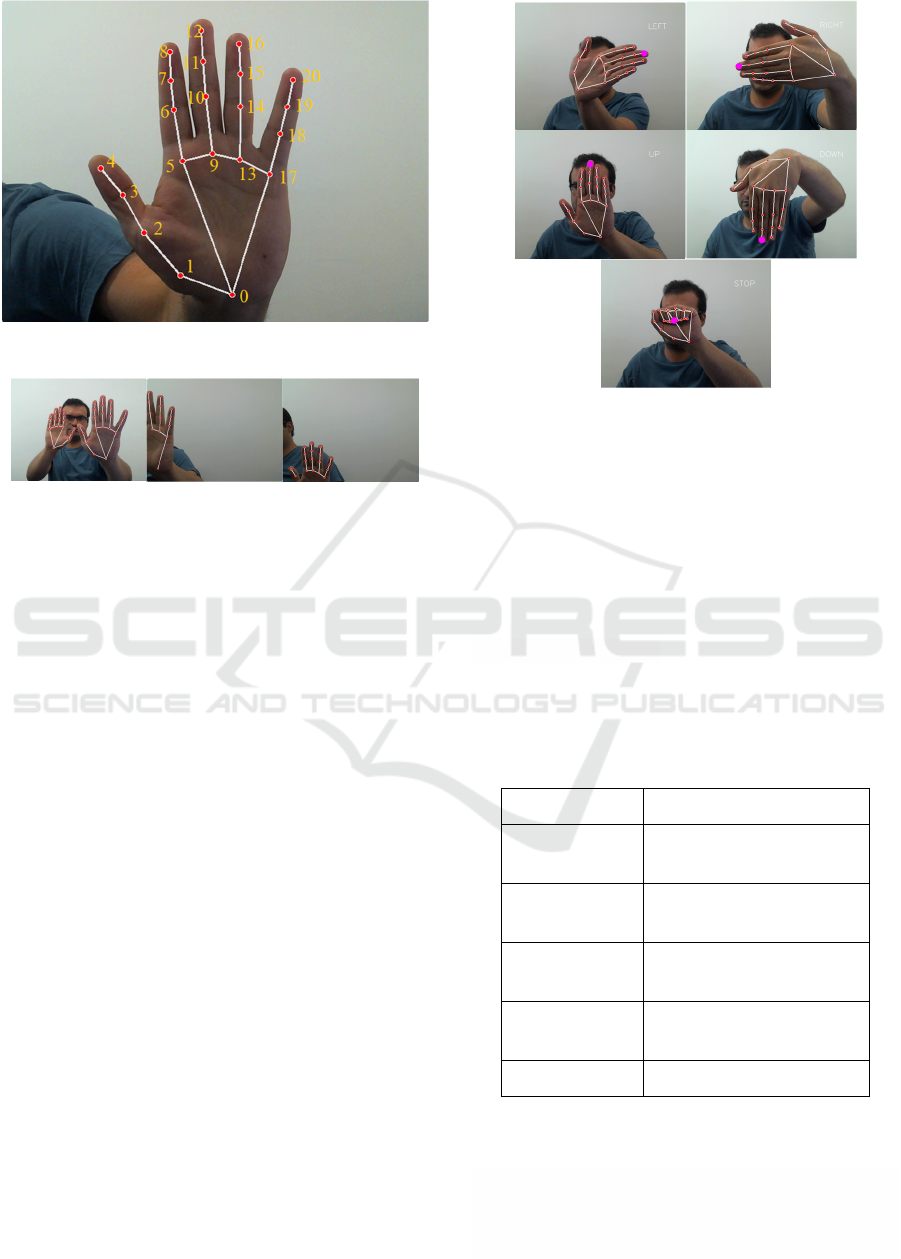
Figure 2: Landmarks identified by MediaPipe.
Figure 3: Landmarks identified by MediaPipe.
MIDDLE_FINGER_DIP, MIDDLE_FINGER_TIP,
RING_FINGER_MCP, RING_FINGER_PIP,
RING_FINGER_DIP, RING_FINGER_TIP,
PINKY_MCP, PINKY_PIP, PINKY_DIP, and
PINKY_TIP.
3.3 Hand Angle Recognition
The four landmarks of up, down, right, and left which
are needed to be identified in this paper can be
recognized by identifying the hand angle. The fifth
hand gesture corresponds to the case when hand is
closed. To recognize closed hand, a polynomial is
fitted to the landmarks 0, 2, 5, 9 and 17. If landmarks
8, 12, 16 and 20 which present the fingertips fall
within the boundaries of this polynomial, it means
that the hand is closed. Otherwise, according to
middle finger angle the respective gesture is
recognized. To detect the angle of the middle finger,
a polynomial is fitted to the landmark 9-12 which
represent the middle finger. Then the angle of this
polynomial is calculated using available command
within Numpy package under Python. The hand
gesture is recognized based on the angle of the middle
finger.
Figure 4: Five different gestures to control robot.
4 EXPERIMENTAL SETUP
4.1 Webcam
The webcam used in this experiment is a Logitech
B525 HD Webcam with its resolution being equal to
640x480 pixels. It is capable of capturing images and
streaming in real time. The frame rate of this camera
is 30fps and can manually rotate 360 degrees. This
camera is a low-cost camera which is used within
experiments.
Table 1: Gesture commands and their interpretation.
Gesture Interpretation
Up Increment 1cm in z-
direction
Down Decrement 1cm in z-
direction
Right Increment 1cm in y-
direction
Left Decrement 1cm in y-
direction
Stop Stop
4.2 V-REP
Simulation Environment
Among different robotic simulation software
packages, V-REP is a general-purpose one developed
by Coppelia Robotics. This software package is
capable of working under different operating systems
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
246
including Windows, Linux, and Mac (Nogueira
2014). It can be operated either using connectivity
with robotic operating system (ROS) or by using
APIs for Matlab and Python. Wide range of mobile
robots as well as non-mobile robots including
industrial robots, and components to provide a robotic
environment are available under this software. It
supports four physics engines including Bullet, ODE,
Newton, and Vortex. Position control, velocity
control, and torque control for industrial robots are
supported within this software package. Joint angle
control within joint space and control under Cartesian
space is performed using built-in DLS as the
preferred inverse kinematics method. In this paper
using Python programming language under Spyder
and Anaconda IDE, and the remote API, simulations
are provided to test the proposed algorithm.
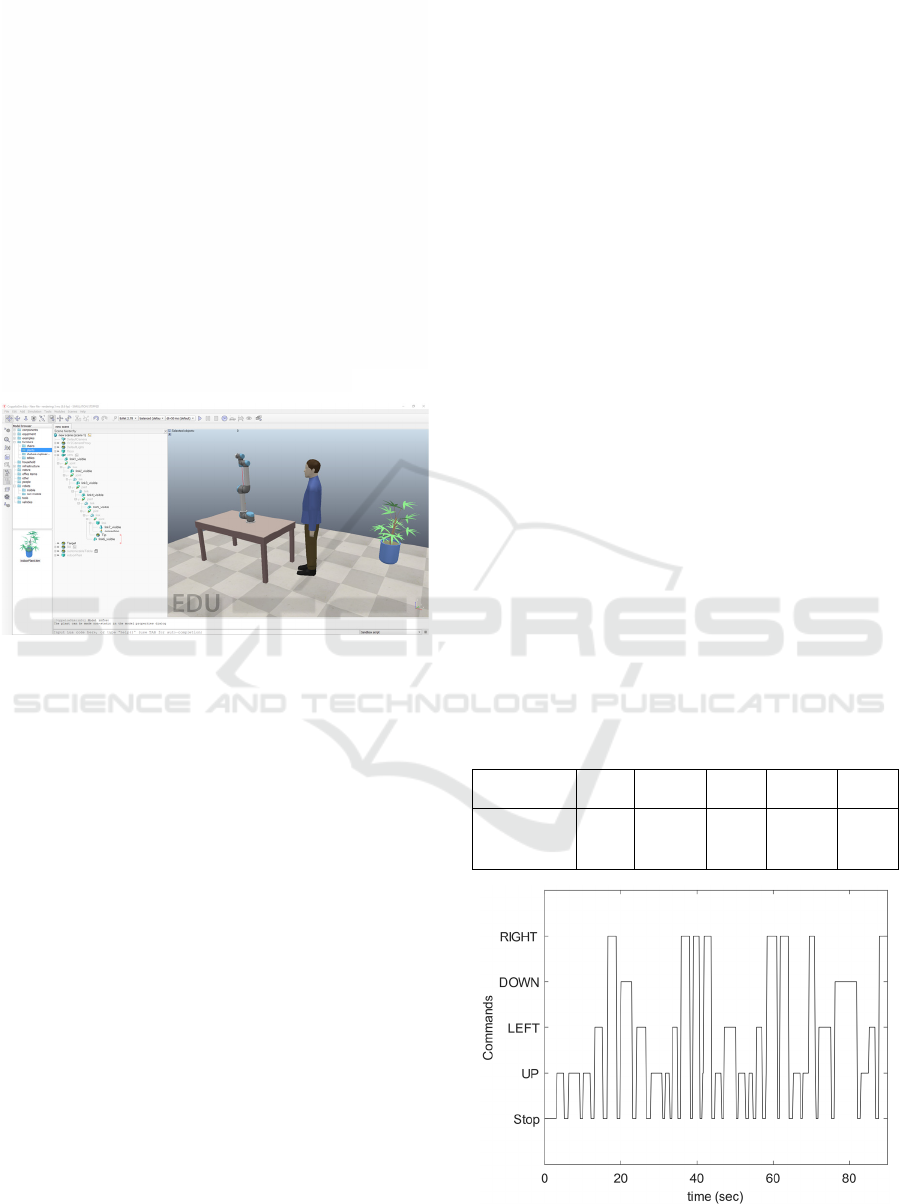
Figure 5: V-REP simulation environment.
Among different industrial robots available under
VREP, UR5 is used in this paper. UR5 is a
collaborative industrial robot which means that it can
collaboratively work with a human being within a
close proximity without extra safety measures such as
cages. UR5 is manufactured by Universal Robots and
is capable of handling up to 5Kg of load with
maximum no-load angular velocity of 180°/. The
inverse kinematics model of this robot under V-REP
environment is DLS. A brief description of this
inverse kinematic model has already been presented
in Section 2.3.
5 EXPERIMENTAL RESULTS
The webcam as explained in Section 4.1 is used to
recognize hand gesture and control the robotic
system. The hand gestures are then communicated
with a simulated UR5 within V-REP environment. To
test the efficacy of the hand gesture recognition
algorithm, a dataset of five different hand gestures
with different orientations are generated. The
generated dataset is made available online under the
github address: www.github.com/moji82/gestures.
The number of pictures used to perform gesture
recognition analysis is totally 8424 pictures. The
result of applying the proposed angle estimation
algorithm to recognize the four gestures are presented
in Table 2. As can be seen from the table, although
the gesture recognition has been performed with high
performance, some misclassifications can still be
observed.
After testing the performance of the proposed
gesture recognition algorithm, the gestures are
communicated to UR5 within VREP simulation
environment. The finger landmark recognition is
performed in Python using MediaPipe version
0.8.10.1. Then the algorithm which is presented in
Section 3.3 is used to recognize the five different
gestures. The total length of experiment is equal to 80
seconds. Figure 6 presents the gesture commands
recognized by the proposed algorithm. The video
associated with this gesture recognition is uploaded
online in https://www.youtube.com/watch?v=CD1e
Nkpl1Hk. Figures 7, 8, and 9 present the reference
commands generated according to the gesture
commands given to the simulated robot. As can be
seen from the figure the tracking performance of the
industrial robot simulated within V-REP is
satisfactory. The mean integral of absolute tracking
error for the industrial robot is calculated numerically
within the simulation environment and is equal to
1.7810
.
Table 2: Performance of the proposed gesture recognition
algorithm.
Gesture UP DOWN LEFT RIGHT STOP
Detection
performance
99.02 99.84 99.95 99.60 98.48
Figure 6: Gesture commands recognized by the proposed
algorithm.
Hand Gesture Interface to Teach an Industrial Robots
247

Figure 7: Robot movements in x-axis.
Figure 8: Robot movements in y-axis.
Figure 9: Robot movements in z-axis.
6 CONCLUSIONS
In this paper, hand gestures are used to control an
industrial robot. To perform this task, MediaPipe is
used to detect the features associated with human
hand. These features include the place of different
parts of finger. The angle of the middle finger is then
used to detect four different hand gestures of up,
down, right, and left. The closed hand status is
recognize using the hand landmarks as well. The hand
gesture recognition algorithm is highly accurate
algorithm. It is observed that the gesture recognition
is performed with high performance. Inspired by the
results obtained from the gesture recognition, it is
used to generate gesture commands which are then
used to control UR5 industrial robot within V-REP
environment. The python-VREP API is used to
transfer the recognized gestures to the simulated robot
within V-REP environment. Inverse kinematics
algorithm of DLS is used to find the joint angle
control of the industrial robot. Tracking performance
of the proposed algorithm is investigated which
demonstrate that the proposed gesture recognition
and control approach are capable of controlling the
industrial robot with high performance.
7 FUTURE WORKS
As a future work, more gestures are added to the
gesture recognition library to make the robot move in
the 3D dimensions and increase functionality. Deep
neural networks will be used for detecting more
gestures. Furthermore, the implementation of the
proposed HRI on real industrial robot in real time will
be considered.
ACKNOWLEDGEMENT
This research was funded by the Engineering and
Physical Sciences Research Council (EPSRC)—
projects EP/R021031/1—Chatty Factories.
REFERENCES
"Fast and flexible ML pipelines." Retrieved 27/04/2023,
from https://developers.google.com/mediapipe.
"Google blog." Retrieved 27/04/2023, from https://develo
pers.googleblog.com/.
"Hand landmarks detection guide." from https://developers.
google.com/mediapipe/solutions/vision/hand_landmar
ker.
Adamides, G. and Y. Edan (2023). "Human–robot
collaboration systems in agricultural tasks: A review
and roadmap." Computers and Electronics in
Agriculture 204: 107541.
Boucher, G., et al. (2019). A parallel low-impedance sensing
approach for highly responsive physical human-robot
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
248

interaction. 2019 International Conference on Robotics
and Automation (ICRA), IEEE.
Burnap, P., et al. (2019). "Chatty factories: A vision for the
future of product design and manufacture with IoT."
Choi, S., et al. (2013). Lead-through robot teaching. 2013
IEEE Conference on Technologies for Practical Robot
Applications (TePRA), IEEE.
Culjak, I., et al. (2012). A brief introduction to OpenCV.
2012 proceedings of the 35th international convention
MIPRO, IEEE.
Halder, A. and A. Tayade (2021). "Real-time vernacular sign
language recognition using mediapipe and machine
learning." Journal homepage: www. ijrpr. com ISSN
2582: 7421.
Kufieta, K. (2014). "Force estimation in robotic
manipulators: Modeling, simulation and experiments."
Department of Engineering Cybernetics NTNU
Norwegian University of Science and Technology.
Lakoju, M., et al. (2021). "Unsupervised learning for product
use activity recognition: An exploratory study of a
“chatty device”." Sensors 21(15): 4991.
Li, C., et al. (2016). "POE-based robot kinematic calibration
using axis configuration space and the adjoint error
model." IEEE Transactions on Robotics 32(5): 1264-
1279.
Mysore, A. and S. Tsb (2022). "Robotic exploration
algorithms in simulated environments with Python."
Journal of Intelligent & Fuzzy Systems 43(2): 1897-
1909.
Nogueira, L. (2014). "Comparative analysis between gazebo
and v-rep robotic simulators." Seminario Interno de
Cognicao Artificial-SICA 2014(5): 2.
Sosa-Ceron, A. D., et al. (2022). "Learning from
Demonstrations in Human–Robot Collaborative
Scenarios: A Survey." Robotics 11(6): 126.
Standardization, I. O. f. (2021). "ISO 8373: 2021 (en)
Robotics—Vocabulary."
Sun, J.-D., et al. (2017). Analytical inverse kinematic
solution using the DH method for a 6-DOF robot. 2017
14th international conference on ubiquitous robots and
ambient intelligence (URAI), IEEE.
Tang, H. and L. Notash (2021). "Neural network-based
transfer learning of manipulator inverse displacement
analysis." Journal of Mechanisms and Robotics 13(3):
035004.
Zhou, D., et al. (2020). "A teaching method for the theory and
application of robot kinematics based on MATLAB and
V‐REP." Computer Applications in Engineering
Education 28(2): 239-253.
Hand Gesture Interface to Teach an Industrial Robots
249
