
Learning Based Interpretable End-to-End Control Using Camera Images
Sandesh Athni Hiremath, Praveen Kumar Gummadi, Argtim Tika, Petrit Rama and Naim Bajcinca
Department of Mechanical and Process Engineering, Rheinland-Pf
¨
alzische Technische Universit
¨
at Kaiserslautern-Landau,
Gottileb-Daimler-Straße 42, 67663 Kaiserslautern, Germany
Keywords:
Autonomous Driving, MPC, Learning Based Control, End-to-End Control, Lane Detection.
Abstract:
This work proposes a learning-based controller for an autonomous vehicle to follow lanes on highways
and motorways. The controller is designed as an interpretable deep neural network (DNN) that takes as
input only a single image from the front-facing camera of an autonomous vehicle. To this end, we first
implement an image-based model predictive controller (MPC) using a DNN, which takes as input 2D
coordinates of the reference path made available as image pixels coordinates. Consequently, the DNN based
controller can be seamlessly integrated with the perception and planner network to finally yield an end-to-end
interpretable learning-based controller. Here, all of the controller components, namely- perception, planner,
state estimation, and control synthesizer, are differentiable and thus capable of active and event-triggered
adaptive training of the relevant components. The implemented network is tested in the CARLA simulation
framework and then deployed in a real vehicle to finally demonstrate and validate its performance.
1 INTRODUCTION
An autonomous driving system consists of various
sub-systems, starting from environment perception,
localization, scene understanding, decision-making,
and controller (Thrun et al., 2006). Every sub-
system outputs intermediate results and representa-
tions, which are very important for tracing decisions,
interpretation, and improving the overall performance
of the system. However, this approach is often time-
consuming and also lacks global consistency, as mod-
ules are optimised for intermediate results rather than
the end task. To remedy this, inspired by the works
of (Pomerleau, 1988) (T. Jochem and D. Pomerleau,
1995) (LeCun et al., 2005) and driven by recent ad-
vancements in data-driven and deep learning meth-
ods (Bojarski et al., 2016) (Codevilla et al., 2019)
(Bansal et al., 2019) (Natan and Miura, 2023), re-
searchers are focusing on developing robust end-to-
end approaches, where all modules are optimized for
the end task. One major issue that arises in end-
to-end approaches is the lack of explainability and
interpretability of intermediate outputs. The recent
learning-based approaches that dominate the method-
ology for implementing end-to-end algorithms suffer
from this problem.
Modular approaches, such as conventional solu-
tions, have the advantage of interpretability for each
involved sub-modules, thus useful for fault detection
in case of unexpected system behavior. Although the
sub-modules are developed separately, they are tightly
coupled and interdependent. Hence, it demands do-
main expertise and additional time to integrate and
maintain the whole pipeline. In autonomous driv-
ing, this is especially the case for perception, data fu-
sion, and localization modules. An overview cover-
ing these modules, their technical and functional as-
pects, as well as the main challenges, is presented in
(Velasco-Hern
´
andez et al., 2020). On the other hand,
an overview of approaches and challenges about plan-
ning and decision-making modules for self-driving
vehicles, is presented in (Schwarting et al., 2018).
Although control modules can be realized inde-
pendently or jointly as a single integrated framework
with the path planning, they are nonetheless tightly
coupled with the perception and state estimation lay-
ers. This makes it challenging to obtain a generalized
and robust system behavior. As an optimization-based
control technique, model predictive control (MPC) is
widely used in automated systems to plan an opti-
mal trajectory or follow a given reference path. MPC
exhibits high structural flexibility in defining qual-
ity and target criteria by means of a cost function
and state/input constraints. These jointly ensure that
system-relevant limits are adhered to, thus ensuring
safe operation. Focusing on path tracking for au-
tomated road vehicles, (Stano et al., 2022) provides
a comprehensive overview and classification of dif-
474
Hiremath, S., Gummadi, P., Tika, A., Rama, P. and Bajcinca, N.
Learning Based Interpretable End-to-End Control Using Camera Images.
DOI: 10.5220/0012206500003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 474-484
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

ferent MPC formulations published in recent years.
Particularly in autonomous driving, many researchers
make use of MPC for path planning or path following
control (Paden et al., 2016) (Weiskircher et al., 2017)
(Ji et al., 2017) (Alcala et al., 2020). The proposed
algorithms are validated mainly by simulations, con-
sidering different driving scenarios. In (Kim et al.,
2021), an MPC-based approach with a variable pre-
diction horizon is proposed, where experiments with
a real vehicle at low speed are performed in addition
to simulations in CARLA. A learning-based MPC us-
ing Gaussian process regression to improve the vehi-
cle model online is presented in (Kabzan et al., 2019)
and tested on the AMZ race car (Kabzan et al., 2020).
Compared to modular methods, end-to-end ap-
proaches solve the problem of autonomous driving as
a single module, from feature extraction/engineering
to decision-making and control algorithms. This ap-
proach maps input data from the vehicle’s sensors to
the output of low-level control commands, such as
steering, braking, and acceleration. The overall archi-
tecture is unified and acts as a black box without sub-
modules and intermediate outputs. However, due to a
lack of meaningful intermediate outputs, the system’s
explainability is lower, and therefore harder to trace
its decision or the root cause of an error. Moreover,
this approach raises challenges such as the require-
ment of bigger models, thus larger computation over-
head, for obtaining sufficiently robust encoded fea-
tures and for fusing information across different sen-
sor modalities.
One of the earliest neural networks, ALVINN, dat-
ing back to 1989, was trained end-to-end for predict-
ing steering angle from camera and radar images for
the task of lane following on public roads without
human intervention (Pomerleau, 1988). In 1995, a
project named “No Hands Across America” was pro-
posed, training an end-to-end model for lane keeping,
mapping video images to steering angle, assisted by a
human driver to control the acceleration and braking
of the vehicle (T. Jochem and D. Pomerleau, 1995).
DAVE, a small robot car, was proposed to avoid ob-
stacles and navigate using image inputs. It also was
trained as an end-to-end convolutional neural network
(CNN) to predict steering angles for off-road vehicle
control (LeCun et al., 2005). End-to-end approaches
came again in prominence when NVIDIA proposed
a large-scale CNN for learning meaningful road fea-
tures in order to solve the entire task of lane following
by steering the vehicle in different environments and
weather conditions (Bojarski et al., 2016). Another
end-to-end algorithm is introduced in (Hecker et al.,
2018) to learn low-level car maneuvers from realistic
inputs of surround-view cameras. More recently, in
(Xiao et al., 2023), the authors have used CNN and
long short-term memory (LSTM) along with a differ-
entiable control barrier network for vision-based end-
to-end autonomous driving. However, it relies on the
availability of a nominal controller that generates fea-
sible controls.
Another simple form of end-to-end learning is
imitation learning (IL), an approach for training au-
tonomous driving systems by imitating an expert hu-
man driver, i.e., steering, acceleration, or braking
(Codevilla et al., 2019). Although it works well
for simple scenarios of lane following, this approach
faces difficulties in complex traffic scenarios since us-
ing just the image as an input is not enough to predict
high-level maneuvers or to map the input into low-
level vehicle control commands. To address these
problems, conditional IL is introduced in (Codevilla
et al., 2018) by mapping the input of the planned ma-
neuver, apart from the perception input, into the con-
trol signal of steering angle and acceleration at train-
ing time. Planned maneuvers are also used as an in-
put in (Xiao et al., 2022), experimenting with multi-
modality of perception data and different stages of
data fusion for conditional IL. A further IL framework
is presented in (Bansal et al., 2019) by synthesizing
trajectory perturbation and augmenting undesirable
behavior to increase the robustness of the model. It is
also worth mentioning the interesting work of (Chen
et al., 2022), where a Bayesian interpreted reinforce-
ment learning (RL) method is proposed for end-to-
end learning in urban scenarios. This, however, in-
volves latent variables which are difficult to physi-
cally interpret thus troublesome for debugging.
Taking advantage of both approaches, we pro-
pose a novel end-to-end approach in which percep-
tion, planning, state estimation, and control modules
are implemented in a differentiable manner via the use
of DNNs. As a result, we retain the interpretability
of intermediate outputs and gain robustness of DNNs
and tuning flexibility to meet global system perfor-
mance. This end-to-end learnable and interpretable
framework takes images as input, and produces con-
trols and future trajectories of the ego-vehicle as out-
puts. The perception module detects static features
of the road in the form of lane markings and deliv-
ers them as the primary information for navigation.
The intermediate output from the perception module
and planner serves as a candidate reference target for
the controller, thus interpretable. The feedback (state
estimation) layer not only filters out a suitable tra-
jectory for the ego-vehicle but also estimates the ve-
hicle’s current state. Altogether, the involved mod-
ules, namely- lane detection, planning, state estima-
tion, and controller, are jointly optimizable for the end
Learning Based Interpretable End-to-End Control Using Camera Images
475

task of lane following. The developed model is vali-
dated by testing on a real vehicle.
The remainder of the paper is organized as fol-
lows. The addressed problem is defined in Sec. 2. The
proposed end-to-end control approach, including all
its components, is described in Sec. 3. Sec. 4 presents
the implementation architecture and experimentation
results. In Sec 5, we discuss the results and provide
some concluding remarks.
2 PROBLEM DEFINITION
In this work, we consider the problem of lane follow-
ing by an autonomous vehicle equipped with a sin-
gle front-facing camera. To this end, we first provide
an MPC formulation, which on one hand, serves as
a mathematical representation of the lane following
task, and on the other hand, serves as a foundation for
developing an end-to-end learning-based controller.
Let X ∈ R
d
x
, U ∈ R
d
u
, Y ∈ R
d
y
denote the
state, control and output variables, respectively,
of a dynamical system and expressed with respect
to (w.r.t) O
v
, the vehicle coordinate system. Let
F : R
d
x
× R
d
u
→ R
d
x
and H : R
d
x
× R
d
u
→ R
d
y
be C
1
functions, i.e. continuously differentiable functions.
Based on this let the dynamics of the system be
specified by
˙
X(t) = F(X(t),U(t)), t > 0,
Y (t) = H(X(t),U (t)), t ≥ 0,
X(0) = x.
(1)
Let X , Y , and U denote the sets of admissible states,
outputs, and controls, respectively. Let Y(t) ∈ Y de-
note the target path of the vehicle and G(t) ∈ G denote
the environmental constraints on the vehicle, then the
path following problem can be posed as the task of
finding an optimal control U(t) ∈ U such that the ve-
hicle with the current state x reaches the target path
Y(t) ∈ Y while adhering to the environmental con-
straint G(t) ∈ G in the fixed time horizon [t,t + T
h
],
t,T
h
> 0. Mathematically, this can be formulated as
the following optimal control problem (OCP):
J(X,U; Y) =
Z
T
h
0
e
sλ
∥H(X,U) − Y(s)∥
2
Q
Y
ds
+
Z
T
h
0
e
sλ
∥U(t + s)∥
Q
U
ds,
X
∗
(t),U
∗
(t) = argmin
X∈X ,U∈U
J(X,U; Y),
dX
ds
(t + s) = F(X (t + s),U(t + s)),s ∈ (0, T
h
]
X(t) = x(t), X(t + s) ≤ G(t + s).
(2)
Solving (2) for each time step t using the data
Y(t),G(t) and x(t) obtained from planning, percep-
tion and feedback modules, respectively, we obtain
the standard MPC algorithm. Thus, the general se-
quence of steps required to solve the lane following
task are (i) perceive, (ii) plan, and (iii) control. Since,
as mentioned above, we are interested in devising an
end-to-end learning based algorithm and also offering
good interpretability of outputs, we design each of the
above mentioned modules as neural networks. The
designed networks are such that when combined, they
form a single computational chain. Consequently, it
facilitates back-propagation of the prediction errors
up to the input layer, thereby enabling end-to-end,
i.e., output-to-input learning mechanism. To this end,
we have implemented four neural networks, which are
then combined together to obtain a single end-to-end
interpretable image-based controller network, which
we refer to as the EyeCon network (shortly as Eye-
ConNet). The first two components of EyeConNet
are the camera based lane-detection and virtual trajec-
tory generation (VTG) networks, named together as
LDVTG. The next (third) component is the feedback
network (shortly as FB) which provides the mecha-
nism for estimating the state of the vehicle based on
the features obtained from the input camera image,
mainly from the output of the LDVTG. Finally, the
fourth component is the controller network, called the
VehCon, which serves as the model predictive con-
troller. Altogether, combining the four, as depicted in
Fig. 3, yields an interpretable network for the task of
following the lane by using only a single front-facing
camera. To the best of our knowledge, the proposed
approach for designing a tuneable autonomous con-
troller that uses only a camera image as the input and
whose behavior is validated on a real vehicle and real
roads has not been made before.
3 COMPONENTS OF THE EyeCon
NETWORK
3.1 Perception and Planning Network
The core perception task for lane following is lane
detection. To this end, we rely on the existing
work of Ultra Fast Structure-aware Deep Lane Detec-
tion (UFLD) (Qin et al., 2020). Although it works
quite well on regular RGB images, it showed poor
performance on images obtained from our vehicle.
The UFLD model trained on TuSimple dataset (TuS,
2023) (even with CuLane and CurveLanes dataset)
did not provide stable and continuous lane detection
across the frames obtained from our test vehicle. We
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
476

argue that the reason for this is the difference in cam-
era settings (i.e., high saturation, brightness, etc.) be-
tween the camera from our test vehicle and the camera
used to obtain the images of the TuSimple dataset. To
overcome this problem, we collected and labeled ap-
proximately 1200 images with the front-facing cam-
era of our test vehicle and used them to fine-tune the
model. After this step, as evident in Fig. 1, the detec-
tions were consistent and stable across video frames
obtained while driving.
Since UFLD outputs detection probabilities across
downscaled columns for four lanes and for fixed row
anchor positions, in order to obtain lane and trajectory
coordinates, we introduce two custom layers that con-
stitute the VTG network (or layer). The algorithmic
steps of VTG network (or layer) are as follows: (i)
for each row and lane-type filter out low probability
detections, (ii) do a softmax across columns and scale
it (based on image resolution) to obtain column posi-
tion, (iii) sort the tensor based on a reverse ordering
of row index, so that the bottom-most pixel (denoting
near field) is first, while the top most pixel (denoting
far field) is last, and finally (iv) resample the tensor
to have fixed number of pixels for each of the four
lanes. Based on the fixed number of lane coordinates
for each lane, we perform the weighted sum of ad-
jacent lane coordinates to obtain the lane-following
trajectory. Consequently, the output of VTG is four
lanes and three trajectory coordinates. The above-
mentioned operations are implemented in a differen-
tiable manner and without disrupting the computation
graph.
3.2 Controller
In this section, we introduce a novel learning based
control algorithm for the problem of lane follow-
ing. We rely on the above MPC formulation based
on the OCP (2) to achieve this. Accordingly, given
x := (x,Y, G), where x is the current state of the vehi-
cle, Y is the reference trajectory and G is the environ-
mental constraints, the solution U
∗
to the OCP (2) can
be written as a mapping x 7→ M (x) with U
∗
:= M(x).
From this perspective, a practically convenient way
to implement a learning based controller is to train
a DNN to learn the mapping x 7→ M(x). We do so
via the following steps: (i) we set up a kinematic
model, which serves as a prediction (state propaga-
tion) model, and (ii) we implement a network for the
generation of optimal controls.
3.2.1 Vehicle Kinematic Model (VKM)
The motion of the vehicle on a 2D road is modeled
at the kinematic level so that the network is easily
(a) Detected lanes by UFLD.
(b) Ego lanes and trajectory.
Figure 1: Outputs from UFLD (left image) and the VTG
(right image). The left image shows the detected lanes of
UFLD after training on TuSimple (orange) and fine-tuning
on RPTU (dark purple) datasets, respectively. The right im-
age shows the ego lane (dark purple) and the generated ego
trajectory (green).
generalizable and thus be applicable to any nonholo-
nomic front axle steered vehicles. Since we are inter-
ested in trajectory tracking, we follow the approach of
(Weiskircher et al., 2017) to model the kinematics in
the Frenet coordinate system given by the prescribed
trajectory. Following this, the error dynamics of the
vehicle is expressed in the Frenet frame O
s
of the ref-
erence path. Letting ψ
s
and ψ
p
denote the orienta-
tion of the reference frame and course angle of the
vehicle, the yaw-error ψ
e
is defined as ψ
e
= ψ
p
− ψ
s
.
The distance of the vehicle to the reference path along
n
s
denotes the lateral distance and thus represents the
lateral error of the vehicle w.r.t the reference path.
Its dynamics is given as: ˙y
e
= v
t
sin(ψ
e
) where v
t
is the instantaneous velocity experienced at the ve-
hicle’s center of gravity (CoG). Similarly, the yaw-
error dynamics
˙
ψ
e
can be given as:
˙
ψ
e
=
˙
ψ
p
− ˙sκ
with ˙s = v
t
cos(ψ
e
)(
1
1−y
e
κ
). Here, s denotes the length
along the reference trajectory and κ = 1/ρ denotes the
curvature of the reference path, with ρ being the ra-
dius of the circle of instantaneous rotation (CIR). In-
troducing the control variables a
t
and α, which denote
longitudinal acceleration and yaw rate of the CoG re-
spectively, the dynamics of the planar motion of the
Learning Based Interpretable End-to-End Control Using Camera Images
477

vehicle is given by the equations:
˙y
e
= v
t
sin(ψ
e
),
˙
ψ
e
= α
p
−
v
t
cos(ψ
e
)κ
(1 − y
e
κ)
,
˙v
t
= a
t
,
˙
ψ
p
= α, ˙s =
v
t
cos(ψ
e
)
(1 − y
e
κ)
, (3)
˙x = v
t
cos(ψ
p
), ˙y = v
t
sin(ψ
p
).
Let U = [a
t
,α]
⊤
∈ R
2
denote the control vector and
X = [X
1
,. .. ,X
7
]
⊤
= [v
t
,ψ
p
,s, ψ
e
,y
e
,x, y]
⊤
∈ R
7
denote the state vector of the vehicle, the VKM can
be compactly written in the form of (3) where H is a
suitable matrix such that
H(X,U) = H(X ) = [v
t
,ψ
e
,y
e
,x, y]
⊤
∈ R
5
.
Based on this and denoting s := {e,c, p,dc, d p}, the
cost function J for the associated MPC formulation
reads as
J(X,U; Y) = γ
e
L
e
(X) + γ
p
L
p
(X,Y) + γ
c
L
c
(U)
+ γ
d p
L
d p
(X) + γ
dc
L
dc
(U), (4)
L
e
(X) =
N
T
h
−1
∑
n=1
e
nλ
∥X
e
(t
n
)∥
2
Q
e
+ λ
e
∥X
e
(t
N
T
h
)∥
2
Q
e
,
L
c
(U) =
N
T
h
−1
∑
n=1
e
nλ
∥U
t
n
∥
2
Q
c
+ λ
c
∥U(t
N
T
h
)∥
2
Q
c
,
L
p
(X,Y) =
N
T
h
−1
∑
n=2
e
nλ
∥X
p
(t
n
) − Y(t
n
)∥
2
Q
p
+ λ
p
∥X
p
(t
N
T
h
) − Y(t
N
T
h
)∥
2
Q
p
,
L
d p
(X) =
N
T
h
∑
n=2
e
nλ
∥X(t
n
) − X(t
n−1
)∥
2
Q
d p
,
L
dc
(U) =
N
T
h
∑
n=2
e
nλ
∥U(t
n
) −U(t
n−1
)∥
2
Q
d
c
.
where, N
T
h
∈ N is the number of discrete points for
the time horizon [t,t +T
h
], t
n
= t +
nT
h
N
T
h
, X
e
= [ψ
e
,y
e
]
⊤
denotes the error vector, X
p
= [v
t
,x, y]
⊤
denotes the
tangential speed and position vector. The quantities
λ
j
,Q
j
for j ∈ s, denotes the scaling factor and
weighting matrices for the loss terms.
3.2.2 Network Architecture
The controller network (VehCon) is designed as
a stacked recurrent network composed of Gated-
Recurrent-Units (GRUs). An i-th GRU cell, N
Z
i
,
takes as input the i-th component of the input-data Y
i
and G
i
to generate the estimate
ˆ
Z
i
, which is then fed
to N
U
, a fully connected network whose weights are
shared across temporal points, to obtain the control
ˆ
U
i
for i-th time step. The output of the network is the
sequence of controls
ˆ
U and the states
ˆ
X predicted by
the controls. Since the control network is designed to
play the role of a statistical optimizer, its loss func-
tional L is based on J (4) and is given as
L(X,U,Y) := L(X,U, Y) + γ
rb
L
rb
(X,U,Y),
L(X,U,Y) := J(X ,U; Y), (5)
L
B
(X,G) :=
γ
G
ε
B
+ ∥X − G∥
2
, ε
B
:= .001,
L
rb
(X,U,Y) := ρ([L
p
,L
e
,L
c
,L
de
,L
dc
,L
B
]
⊤
),
Q
p
= diag([q
v
,q
x
,q
y
]
⊤
), Q
e
= diag([q
ψ
e
,q
y
e
]
⊤
),
Q
c
= diag([q
a
t
,q
α
]
⊤
), Λ = [λ, λ
p
,λ
e
,λ
c
]
⊤
where, L
B
is acting as a barrier function that han-
dles environmental constraints, ρ is a parameterized
robust-loss-functional (Barron, 2019). Altogether, the
VehCon is composed of 174 K learning parameters
that amounts to 837 KB of memory consumption.
Next, the data required for training the statistical opti-
mization solver is synthetically generated by appro-
priately sampling the inputs from the valid range.
Based on this x ∈ U([−1, 1]), Y a local trajectory
for the vehicle, is obtained by parameterizing with
respect to the curvature κ, which is uniformly sam-
pled from [−.1, .1]. The generated trajectories are set
to have lane-boundaries at fixed lateral distances. In
this manner, we generate a generic dataset to cover
all possible (local) maneuvers of the vehicle. Further-
more, we also collect the reference trajectories and
feedback input predicted by the LDVTG and FB net-
works on the RPTU test dataset. The former serves
for robust stand-alone training of the control network,
while the latter serves for fine-tuning it on the outputs
of the preceding components of the EyeConNet. Both
datasets are as shown in Fig. 2.
3.3 Feedback Network
The feedback network or layer (FB) is an important
component of EyeConNet that is responsible for esti-
mating the current state of the vehicle using only the
information obtained from the image features. The
feedback layer takes as input the lane and trajectory
coordinates (i.e. the output of VTG) and provides as
output (i) the ego reference and lane coordinates and
(ii) an estimate of the current vehicle state
ˆ
X(t). The
former is obtained by selecting the lane and trajec-
tory (triplet) having more than a required number of
coordinates, which then serve as the ego or reference
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
478

Synthetic dataset
x (m)
y (m)
Reference path
Start position
Target position
(a) Training samples.
x (m)
y (m)
RPTU dataset
Reference path
Start position
Target position
(b) RPTU data samples.
Figure 2: Samples from dataset consisting of reference
trajectories (black), start positions (cyan) and target end
(green) positions.
(triplet) coordinates. In this way, FB is also acting as
a naive decision-making layer. Once the ego triplet,
consisting of a pair of lane coordinates and reference
trajectory coordinates, are obtained, the ego trajec-
tory is used to estimate the state vector
ˆ
X(t). Firstly,
since we want to generate the trajectory local to the
vehicle, we transform the pixels from the image co-
ordinate system to the vehicle coordinate system O
v
.
Consequently, this has the added benefit that some of
the components of the state vector remain fixed, i.e.
ˆ
ψ
p
= π/2, ˆy = 0 and ˆx = −x
vs
with x
vs
:= 2m denot-
ing the fixed look ahead distance of the camera. The
error components X
e
:= [y
e
(t),ψ
e
(t)]
⊤
is estimated
as follows. Let y
i
= (u
i
,v
i
)
⊤
denote the i-th coordi-
nate of the ego trajectory in vehicle coordinate, then
ˆy
e
≈ −
k
y
e
n
∑
n
i
u
i
and
ˆ
ψ
e
≈ −arctan([k
ψ
e
,u
n
− u
0
]
⊤
)
with k
y
e
> 0 and k
ψ
e
≥ 1 acting as tuning parameters.
Based on testing and simulation we set k
y
e
= 5 and
k
ψ
e
= 2. Next, the curvature κ
p
(t) of the virtual tra-
jectory is obtained by using the parameterized curva-
ture formula, where derivatives are approximated by
finite differences. Based on this, the current estimate
ˆ
X(t) of the vehicle state X at time t, w.r.t O
v
, is given
as [v
o
t
,
π
2
,0, ψ
e
,y
e
,0, −x
vs
]
⊤
. Here, v
o
t
is the open-loop
estimate of the vehicle velocity obtained by integrat-
ing (starting from the previous state) the acceleration
signal or from the IMU sensor. Similar to VTG, the
operations of FB are implemented in a differentiable
manner and do not consists of any learnable parame-
ters.
3.4 Training Methodology
To train the EyeConNet, we follow a three stage ap-
proach. In the first stage (Stage1) we train the LD-
VTG, i.e., the UFLD and VTG networks, to obtain
stable lane detections and virtual trajectories. In the
second stage (Stage2) we use the predictions of the
LDVTG on the RPTU test-set as the training set and
finetune the VehCon. This is analogous to detach-
ing the computation graph of the VehCon from the
rest of EyeConNet while training. The parameters
involved in (4) and (5) for training the VehCon are
as described in Table 1. The Stage2 training mainly
facilitates in adapting the VehCon, which was pre-
trained on a generic vehicle kinematics dataset (see
Fig. 2), for the distribution of feedback inputs gen-
erated by the VTG. Subsequently, in the third stage
(Stage3) we combine VehCon and LDVTG to ob-
tain the EyeConNet, and train it on the combined
dataset of TuSimple and RPTU. For the unified train-
ing of EyeConNet, the learnable parameters of the
networks are the ones belonging to ULFD and Ve-
hCon, since, in the current implementation, the VTG
and FB do not have any learnable parameters. Based
on this, the loss function for the joint training is given
by L
EyeCon
= L
UFLD
+ 0.3L
VehCon
, where L
VehCon
is
given by (5) and L
UFLD
is as in (Qin et al., 2020).
The evaluation scores, on the joint test set of RPTU
and TuSimple, for each training stage are tabulated in
Table 2. For comparison, we have also mentioned the
baseline score obtained by using pretrained (TuSim-
ple) weights of the UFLD network. Firstly, the result
of Stage1 training (second row of Table 2) indicates
that both fine-tuning (warm start) and fresh training
(cold start) of LDVTG network on the joint dataset do
not quantitatively alter the results much. However, as
depicted in Fig. 1, there is a significant increase in the
quality in terms of pixel-wise and frame-wise conti-
nuity of the detected lanes on RPTU images. Next,
the result of Stage2 training (third row of Table 2)
is indicated by the RMSE value of the error vector
[ψ
e
,y
e
] evaluated at the terminal time, t + T
h
, of the
prediction horizon. The obtained value of 0.123 is
small enough (i.e. y
e
< 15cm and ψ
e
< .1 degree) to
proceed with the next stage of training. Subsequently,
in Stage3 for training the EyeConNet we used the pre-
trained weights of the VehCon from Stage2. Here,
we performed experiments by warm starting and cold
starting the LDVTG, wherein the former uses the
baseline weights or starts fresh. Additionally, we also
Learning Based Interpretable End-to-End Control Using Camera Images
479
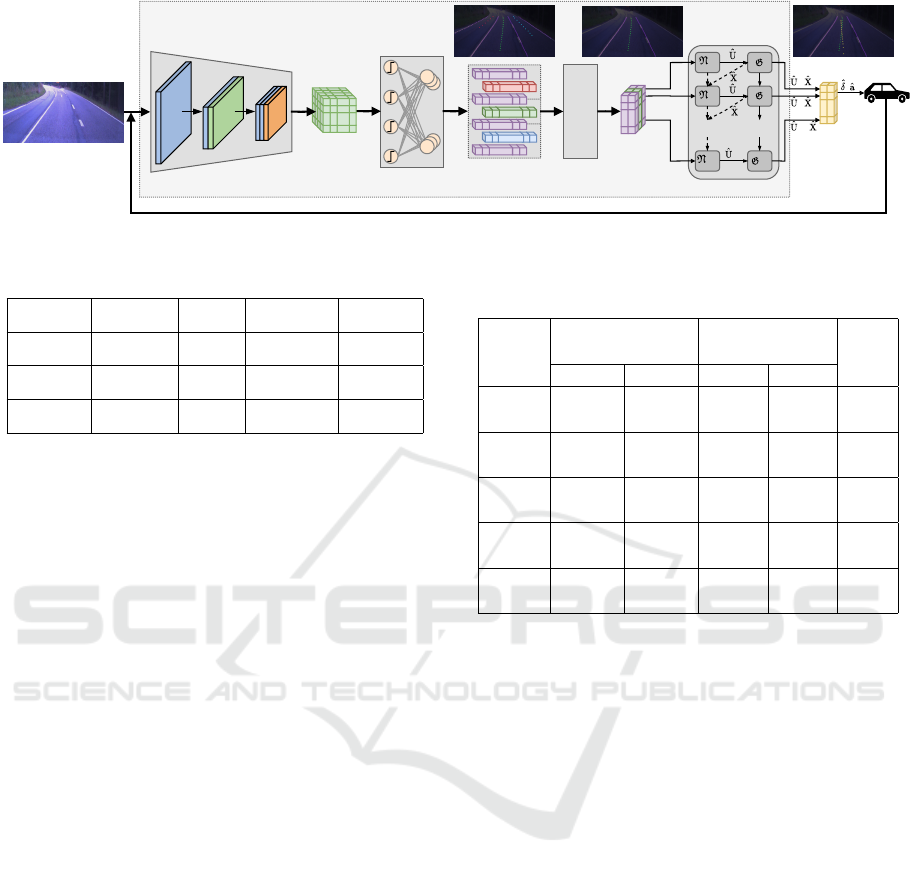
EyeConNet
VTG
UFLD
...
...
...
...
...
...
lane3
VehCon
lane1
lane2
lane4
ego-left
ego
ego-right
Feedback Layer
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
Input Camera Image
softmax
softmax
FB
lane1
lane2
lane3
lane4
ego
ego-left
ego-right
Ego-lanes
& trajectory
Detection
Probabilities
predicted trajectoryreference trajectory
Z
0
Z
1
Z
n-1
0
1
1
2
n-1
0
1
n-1
0 1
1 2
nn-1
,
,
,
,
t
Figure 3: Network architecture of EyeConNet, an end-to-end lane following controller network.
Table 1: Parameter values relating to the loss function L (5).
λ = 0.02 λ
p
= 20 λ
e
= 20 λ
c
= .5 q
v
= 10
3
q
y
= .05 q
ψ
e
= 10 q
y
e
= 2 q
a
t
= .01 q
α
= 5
γ
rb
= 1 γ
c
= 1 γ
d p
= 1 γ
dc
= 10
−3
γ
e
= 10
−5
γ
G
= .005 γ
p
= 10
−5
q
x
= 2
experimented by having the computation graph for
the controller network either detached or joined with
the rest of the network. The former is referred to as
Stage3.0, and the latter as Stage3.1. Based on the
evaluation scores of each training stage tabulated in
Table 2, we see that firstly, cold start training is bet-
ter than the warm start, i.e., using pretrained UFLD
weights (baseline) is not quantitatively advantageous.
Secondly, we notice that detached training of VehCon
ensures that LDVTG has almost the same perfor-
mance as that of the Stage1. This is to say that the risk
of deterioration of LDVTG due to multi-tasked train-
ing of EyeConNet is reduced to almost zero by having
the VehCon in detached mode while training. Conse-
quently, the result of VehCon for Stage3 is similar to
that of Stage2 with Stage3.0 showing slightly better
and the Stage3.1 slightly worse performance. Look-
ing at Fig. 5 and Fig. 6, we see that the generated con-
trols are well-behaved in the sense that the error states
[ψ
e
,y
e
]
⊤
are smoothly reduced to zero along the pre-
diction horizon such that the error distribution at the
end of the prediction horizon has the mean value close
to zero. Furthermore, from Fig. 7, we can also infer
that generated acceleration and yaw rates are smooth
and decay to zero along the prediction horizon. These
qualitative properties, along with good prediction re-
sults from EyeConNet, as depicted in Fig. 4, assure
confidence for deploying it on the vehicle and testing
it on real scenarios.
Table 2: Stage wise training results for network compo-
nents.
Training
Fine Tuning Fresh Training
RMSE(warm start) (cold start)
Stages Acc F1-S Acc F1-S
-
Baseline 95.82% 87.88% - -
Stage1 95.60% 87.54% 95.27% 87.23% -
Stage2 - - - - 0.123
Stage3.0 95.6% 87.4% 95.8% 87.8% 0.118
Stage3.1 85.4% 62.5% 86.5% 66.4% 0.124
4 IMPLEMENTATION AND
RESULTS
The proposed algorithms are tested and validated on
an VW Passat, which has been modified to perform
autonomous driving experiments, see Fig. 8. The
experimental vehicle is equipped with power man-
agement, computational, environment sensing, and
communication resources, including CAN-bus-based
reading and writing access to the vehicle data, respec-
tively, vehicle actuators. In this work, perception is
based on a single camera directed toward the roadway.
The control algorithms are implemented in PYTHON
on a CarPC with NVIDIA A2 GPU and Intel Core i7-
8700T Processor with a clock rate of 2.40GHz. Since
EyeConNet is implemented using the PyTorch frame-
work, it was easily deployed in CarPC. Furhtermore,
to compare its performance, we also implemented the
standard MPC problem using the CasADi framework
(Andersson et al., 2019) and the resulting optimiza-
tion problem, i.e., the OCP (2), is solved with the
IPOPT solver (W
¨
achter and Biegler, 2006).
A schematic of the lane following controller im-
plemented in the vehicle is shown in Fig. 9. The per-
ception module takes input from the camera and pro-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
480
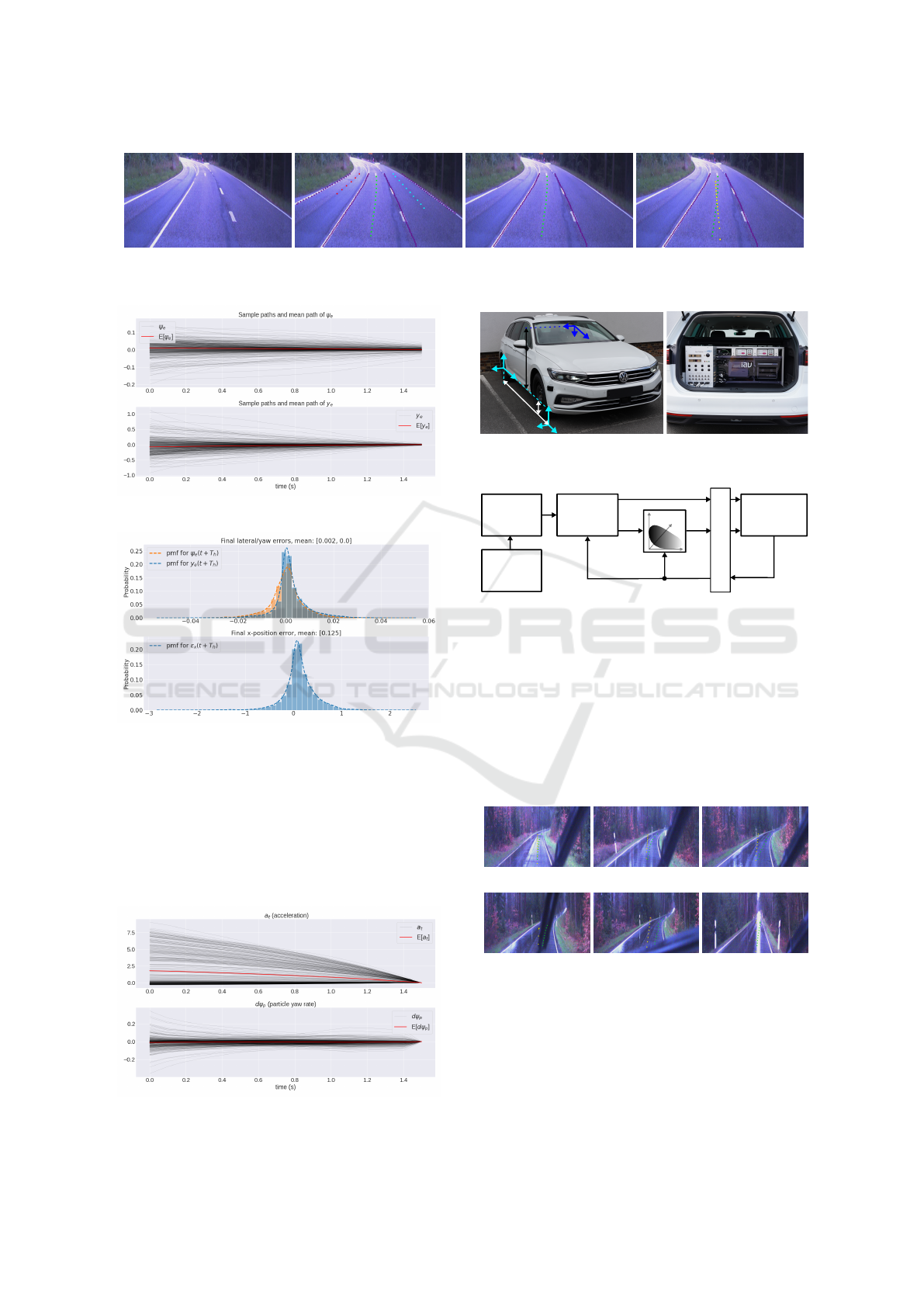
(a) Input Image. (b) Virtual trajectories. (c) Selected ego trajectory. (d) Predicted vehicle path.
Figure 4: Prediction result of EyeConNet on a sample test image.
Figure 5: Predicated error states ψ
e
and y
e
.
Figure 6: Error distributions of terminal position and orien-
tation of the vehicle.
vides the reference trajectory for the controller, which
then, following the idea presented in Section 3.2, syn-
thesizes optimal values for the vehicle longitudinal
acceleration ˆa
t
and the yaw rate
ˆ
ψ
p
. The perception
block is nothing but the LDVTG, while the controller
block is the VehCon or a classical MPC-based con-
troller. Note that here we have, on purpose, decou-
Figure 7: Generated controls
x
vs
O
v
z
0
z
vc
O
s
O
c
Figure 8: Experimental vehicle.
ControllerPerception
Camera
Vehicle
ˆ
δ
ˆ
ψ
p
ˆa
t
vv
δ
v
ψ
CAN
Figure 9: Schematics of the vehicle control architecture.
pled the perception and controller block to facilitate
the integration of the classical MPC with the LDVTG.
The controller takes the current velocity of the vehi-
cle as a feedback and uses it to update the state es-
timate from FB. Furthermore, the obtained yaw rate
ˆ
ψ
p
is converted to the corresponding steering angle
ˆ
δ using a three-dimensional function approximation
previously generated from measurements at different
vehicle speeds.
(a) Curve at sight (b) Entering curve (c) At curve
(d) Visual block (e) Exiting curve (f) Successful exit
Figure 10: Curve maneuver of EyeCon at 54 kmph under
poor visibility and heavy rain.
4.1 Results
In this section, we mainly focus on the experimen-
tal results performed with our experimental vehicle
VW Passat (see Fig. 8). Albeit, before proceeding
Learning Based Interpretable End-to-End Control Using Camera Images
481
to vehicle testing, we indeed tested EyeConNet in
CARLA for two different map environments namely
Town04 and Town06. In this test, the EyeConNet
was able to detect the lanes for more than 95% of the
frames and the detections were also sequentially sta-
ble. Consequently, the generated local trajectory was
always within the lane boundary and even centered.
As a result, the VehConNet was successful in follow-
ing the generated reference path successfully and re-
liably, which subsequently encouraged us to go ahead
with the real vehicle testing. For the real-world test-
ing, we performed tests on a public country-side road
that had sufficient good lane markings. The tests are
performed for two target velocity speeds, 36km/h and
54km/h. For safety reasons, we have avoided testing
at higher speeds. In order to validate the perception
and planner module, i.e., the LDVTG, we also per-
form the same tests using a standard MPC controller.
This also serves as a comparison candidate for the Ve-
hCon. The obtained results are as depicted in Fig. 11.
Based on this, we can observe the following: (i) at the
global vehicle behavior level, both MPC and EyeCon-
Net based controllers were able to achieve the task
of lane following. The drive-experience was stable
and pleasant, without any abrupt behavior. The sta-
ble behavior of MPC indicates that LDVTG and FB
were sufficiently good in providing reliable lane de-
tections, reference trajectory, and state estimates. (ii)
The performance of the VehCon (DNN controller) is
in close comparison with that of the MPC. The tra-
versed trajectory in both cases was nearly identical
(as seen in the top left corner, blue vs. orange path)
for both target velocities. The high-level profile of
the steering angle is also similar for both controllers.
This is to say that the turning maneuvers match each
other and also the road profile. At higher speeds, the
magnitude of steering is relatively higher in compar-
ison to the lower speed. Furthermore, the VehCon is
more reactive to turns in the sense that it aligns to a
turn earlier and is thus marginally better at sharper
turns. Looking at the velocity profiles, we see that
both controllers are able to reach the respective tar-
get velocities pretty quickly and are able to maintain
it. However, the VehCon seems to be slightly aggres-
sive and tends to overshoot the reference. This is ex-
plainable from the control profiles generated by Ve-
hCon on the test set, which indicates a clear bias for
positive values, depicted in the upper plot of Fig. 7.
Despite this, we did not observe a deteriorating ef-
fect on the controller performance. Altogether, the
interpretable architecture of EyeConNet provides sat-
isfactory performance and offers robust validation and
testing mechanism. Furthermore, it also enabled the
computation time for each of the network components
to be measured during the closed loop operation of
the controller. This is tabulated in Table 3. As per
that, we see that perception and planning together take
under 15 ms in total, with perception being around
5 ms and planning around 9 ms, respectively, on av-
erage. The state estimation is even faster, with under
2 ms of runtime, while the control synthesizer takes
the most time, around 32.5 ms on average. Conse-
quently, all the modules combined, the total runtime
is under 50 ms, which we believe to be quite good for
the complexity of the task being considered.
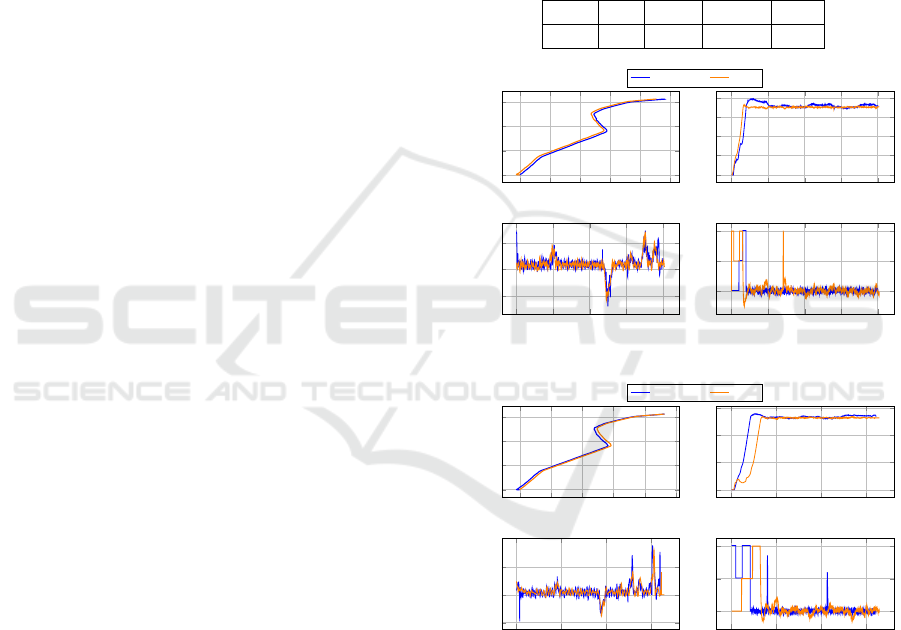
Table 3: Mean computation times of network components.
UFLD VTG FB VehCon Total
5 ms 9 ms 1.5 ms 32.5 ms 48 ms
0 0.1 0.2 0.3 0.4 0.5
0
1
2
3
x (km)
y (km)
Vehicle path
EyeConNet MPC
0 50 100 150 200
0
10
20
30
40
Time (s)
v
t
(km/h)
Vehicle velocity
0 50 100 150 200
−0.25
0
0.25
Time (s)
δ (rad)
Steering angle
0 50 100 150 200
0
0.5
1
Time (s)
a
t
(m/s
2
)
Vehicle acceleration
(a) Results of experiment with 36 kmph as target velocity.
0 0.1 0.2 0.3 0.4 0.5
0
1
2
3
x (km)
y (km)
Vehicle path
EyeConNet MPC
0 50 100 150
0
20
40
60
Time (s)
v
t
(km/h)
Vehicle velocity
0 50 100 150
−0.5
0
0.5
Time (s)
δ (rad)
Steering angle
0 50 100 150
0
0.5
1
Time (s)
a
t
(m/s
2
)
Vehicle acceleration
(b) Results of experiment with 54 kmph as target velocity.
Figure 11: Comparison of Vehicle performance at different
target speeds of 36kmph (10m/s) and 54kmph (15m/s) when
fed with VehCon and MPC derived controls respectively.
5 CONCLUSION
In this paper, we have proposed an end-to-end inter-
pretable image based DNN controller called EyeCon-
Net, capable of steering and accelerating the vehicle
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
482

directly from the image information. The modular
and interpretable design of EyeConNet not only al-
lowed us to train it incrementally, keeping the perfor-
mance of the fused network equal to that of their stan-
dalone counterparts, but also allowed seamless inte-
gration with the classic MPC controller, enabling ro-
bust and comparative testing. The developed network
was initially tested in CARLA, then subsequently
tested on real public roads while adhering to safety
requirements. The obtained performance for EyeCon-
Net was satisfactory and in good comparison with
a classical MPC controller. The stable performance
of MPC, when fed with LDVTG outputs, reassures
the stable performance of the perception and planner
modules, thanks to stage-wise training and finetuning
on images obtained from vehicle-specific cameras.
Furthermore, testing during rainy weather and low
visibility conditions, both MPC and EyeConNet were
able to show respectable performance (see Fig. 10)
with minor deterioration, i.e., occasional deactivation
of the control interface due to lack of reference trajec-
tory due to failure of LDVTG. Lastly, a highly com-
petitive runtime of under 50 ms of EyeConNet, on the
one hand, encourages us to consider even more com-
plex models to increase robustness and, on the other
hand, to consider active-closed-loop learning with ei-
ther MPC or driver in the loop. The latter opens up a
lot of interesting research problems, especially in the
area of IL and RL.
ACKNOWLEDGEMENTS
This work was supported by the German Federal Min-
istry of Transport and Digital Infrastructure (BMDV)
within the scope of the project AORTA with the grant
number 01MM20002A.
REFERENCES
Tusimple: Tusimple benchmark. https://github.com/
TuSimple/tusimple-benchmark. Accessed: 2023-03-
15.
Alcala, E., Sename, O., Puig, V., and Quevedo, J. (2020).
Ts-mpc for autonomous vehicle using a learning ap-
proach. IFAC-PapersOnLine, 53(2):15110–15115.
21st IFAC World Congress.
Andersson, J. A. E., Gillis, J., Horn, G., Rawlings, J. B., and
Diehl, M. (2019). CasADi – A software framework
for nonlinear optimization and optimal control. Math-
ematical Programming Computation, 11(1):1–36.
Bansal, M., Krizhevsky, A., and Ogale, A. S. (2019). Chauf-
feurnet: Learning to drive by imitating the best and
synthesizing the worst. In Robotics: Science and Sys-
tems XV, University of Freiburg, Freiburg im Breisgau,
Germany, June 22-26, 2019.
Barron, J. T. (2019). A general and adaptive robust loss
function. CVPR.
Bojarski, M., Testa, D. D., and et al. (2016). End to end
learning for self-driving cars. CoRR, abs/1604.07316.
Chen, J., Li, S. E., and Tomizuka, M. (2022). Interpretable
end-to-end urban autonomous driving with latent deep
reinforcement learning. IEEE Transactions on Intelli-
gent Transportation Systems, 23(6):5068–5078.
Codevilla, F., M
¨
uller, M., L
´
opez, A. M., Koltun, V., and
Dosovitskiy, A. (2018). End-to-end driving via condi-
tional imitation learning. In International Conference
on Robotics and Automation, ICRA, pages 1–9. IEEE.
Codevilla, F., Santana, E., L
´
opez, A. M., and Gaidon, A.
(2019). Exploring the limitations of behavior cloning
for autonomous driving. In International Conference
on Computer Vision, ICCV 2019, pages 9328–9337.
IEEE.
Hecker, S., Dai, D., and Gool, L. V. (2018). End-to-end
learning of driving models with surround-view cam-
eras and route planners. In European Conference on
Computer Vision, ECCV, volume 11211 of Lecture
Notes in Computer Science, pages 449–468. Springer.
Ji, J., Khajepour, A., Melek, W. W., and Huang, Y. (2017).
Path planning and tracking for vehicle collision avoid-
ance based on model predictive control with multicon-
straints. IEEE Transactions on Vehicular Technology,
66(2):952–964.
Kabzan, J., Hewing, L., Liniger, A., and Zeilinger, M. N.
(2019). Learning-based model predictive control for
autonomous racing. IEEE Robotics and Automation
Letters, 4(4):3363–3370.
Kabzan, J., Valls, M. I., and et al. (2020). Amz driverless:
The full autonomous racing system. Journal of Field
Robotics, 37(7):1267–1294.
Kim, M., Lee, D., Ahn, J., Kim, M., and Park, J. (2021).
Model predictive control method for autonomous ve-
hicles using time-varying and non-uniformly spaced
horizon. IEEE Access, 9:86475–86487.
LeCun, Y., Muller, U., and et al. (2005). Off-road obstacle
avoidance through end-to-end learning. In Advances
in Neural Information Processing Systems 18, NIPS,
pages 739–746.
Natan, O. and Miura, J. (2023). End-to-end autonomous
driving with semantic depth cloud mapping and multi-
agent. IEEE Trans. Intell. Veh., 8(1):557–571.
Paden, B.,
ˇ
C
´
ap, M., and et al. (2016). A survey of motion
planning and control techniques for self-driving urban
vehicles. IEEE Transactions on Intelligent Vehicles,
1.
Pomerleau, D. (1988). ALVINN: an autonomous land ve-
hicle in a neural network. In Touretzky, D. S., editor,
Advances in Neural Information Processing Systems
1, [NIPS Conference, Denver, Colorado, USA, 1988],
pages 305–313. Morgan Kaufmann.
Qin, Z., Wang, H., and Li, X. (2020). Ultra fast structure-
aware deep lane detection. In European Conference
on Computer Vision, pages 276–291. Springer.
Learning Based Interpretable End-to-End Control Using Camera Images
483

Schwarting, W., Alonso-Mora, J., and Rus, D. (2018). Plan-
ning and decision-making for autonomous vehicles.
Stano, P., Montanaro, U., and et al. (2022). Model predic-
tive path tracking control for automated road vehicles:
A review. Annual Reviews in Control.
T. Jochem and D. Pomerleau (1995). No hands across amer-
ica official press release. Carnegie Mellon University.
Thrun, S., Montemerlo, M., and et al. (2006). Stanley: The
robot that won the DARPA grand challenge. J. Field
Robotics, 23(9):661–692.
Velasco-Hern
´
andez, G. A., Yeong, D. J., Barry, J., and
Walsh, J. (2020). Autonomous driving architectures,
perception and data fusion: A review. In Nedevschi,
S., Potolea, R., and Slavescu, R. R., editors, 16th
IEEE International Conference on Intelligent Com-
puter Communication and Processing, ICCP 2020,
Cluj-Napoca, Romania, September 3-5, 2020, pages
315–321. IEEE.
Weiskircher, T., Wang, Q., and Ayalew, B. (2017). Pre-
dictive Guidance and Control Framework for (Semi-
)Autonomous Vehicles in Public Traffic. IEEE Trans-
actions on Control Systems Technology, 25(6):2034–
2046.
W
¨
achter, A. and Biegler, L. (2006). On the implemen-
tation of an interior-point filter line-search algorithm
for large-scale nonlinear programming. Mathematical
programming, 106:25–57.
Xiao, W., Wang, T.-H., and et al. (2023). Barriernet: Dif-
ferentiable control barrier functions for learning of
safe robot control. IEEE Transactions on Robotics,
39(3):2289–2307.
Xiao, Y., Codevilla, F., Gurram, A., Urfalioglu, O., and
L
´
opez, A. M. (2022). Multimodal end-to-end au-
tonomous driving. IEEE Trans. Intell. Transp. Syst.,
23(1):537–547.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
484
