
Towards Developing an Ontology for Safety of Navigation Sensors in
Autonomous Vehicles
Mohammed Alharbi
1,2 a
and Hassan A. Karimi
1
1
Geoinformatics Laboratory, School of Computing and Information, University of Pittsburgh, Pittsburgh, PA 15260, U.S.A.
2
College of Computer Science and Engineering, Taibah University, Medina 42353, Saudi Arabia
Keywords:
Autonomous Vehicles, Ontologies, Sensor Uncertainty, Uncertainty Assessment, Autonomous Navigation.
Abstract:
Understanding and handling uncertainties associated with navigation sensors in autonomous vehicles (AVs)
is vital to enhancing their safety and reliability. Given the unpredictable nature of real-world driving envi-
ronments, accurate interpretation and management of such uncertainties can significantly improve navigation
decision-making in AVs. This paper proposes a novel semantic model (ontology) for navigation sensors and
their interactions in AVs, focusing specifically on sensor uncertainties. At the heart of this new ontology is
understanding the sources of sensor uncertainties within specific environments. The ultimate goal of the pro-
posed ontology is to standardize knowledge of AV navigation systems for the purpose of alleviating safety
concerns that stand in the way of widespread AV adoption. The proposed ontology was evaluated with scenar-
ios to demonstrate its functionality.
1 INTRODUCTION
Autonomous vehicles (AVs), equipped with advanced
navigation sensors, stand as a pivotal development to-
wards mitigating the widespread casualties and in-
juries resulting from human driving errors. AVs’
perception sensors, algorithms, and electronics con-
stantly monitor driving space and execute naviga-
tion tasks such as planning paths, maneuvering, and
detecting objects. Human behaviors contribute to
around 90% of fatal car accidents, positioning au-
tomation as a revolutionary safety solution (National
Highway Traffic Safety Administration, 2022). How-
ever, to achieve a high level of safety, AVs should
be deliberately engineered to favor safety over conve-
nience and speed. Otherwise, their superior percep-
tion would only prevent about a third of these acci-
dents (Mueller et al., 2020).
AV navigation systems face vulnerabilities stem-
ming from the inherent limitations of their sensors
and algorithms. For instance, camera-based object
detection techniques are compromised in rainy condi-
tions, while the accuracy of global navigation satellite
systems (GNSSs) degrades due to physical obstruc-
tions like buildings and tunnels. These limitations re-
sult in uncertainties and failures in navigation tasks,
a
https://orcid.org/0000-0002-9293-4905
raising legitimate concerns about the safety of passen-
gers, properties, and other road users. Consequently,
the development of AV navigation that is reliable and
trustworthy remains a challenge, particularly for intri-
cate navigation tasks.
Addressing this challenge has prompted intensi-
fied efforts in researching, developing, and validat-
ing automated driving systems. A typical reliability
metric for AVs is distance traveled without accidents
or failures. Experiencing adequate failure and acci-
dent rates requires AVs to drive hundreds of millions
of miles successfully, taking hundreds of years for a
fleet of 100 vehicles driving at a speed of 25 miles
per hour (Kalra and Paddock, 2016). Moreover, such
tests are unlikely to expose AVs to the full spectrum
of driving conditions.
To overcome the problem of high-mileage travel
testing, advanced or complementary assessment tech-
niques are required. An example of such techniques
is scenario-based that prioritizes safety (Riedmaier
et al., 2020). Such scenarios can be generated us-
ing knowledge-based (e.g., Chen and Kloul, 2018) or
data-driven (e.g., Krajewski et al., 2018; Zhou and
del Re, 2017) approaches. In the former, ontologies
are widely used for organizing and preserving ex-
pert knowledge, while the latter leverages machine-
learning and data fusion methods for pattern recog-
nition and scenario classification. However, the cur-
Alharbi, M. and Karimi, H.
Towards Developing an Ontology for Safety of Navigation Sensors in Autonomous Vehicles.
DOI: 10.5220/0012207300003598
In Proceedings of the 15th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2023) - Volume 2: KEOD, pages 231-239
ISBN: 978-989-758-671-2; ISSN: 2184-3228
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
231

rent literature on scenario-based techniques is cen-
tered around safety aspects related to driving maneu-
vers (e.g., Zhou and del Re, 2017), road conditions
(e.g., Chen and Kloul, 2018), intersections (e.g., Je-
senski et al., 2019), and difficult weather conditions
(e.g., Gyllenhammar et al., 2020), with little or no at-
tention paid to navigation sensor safety aspects.
To fill this research gap, we propose a semantic
model (ontology) for AVs to understand and handle
uncertainties associated with navigation sensors. The
fundamental idea underlying our ontology involves
identifying and recognizing sources of sensor limita-
tion within a specific space.
The paper is structured as follows. Section 2 sum-
marizes relevant AV ontologies. Section 3 introduces
the proposed ontology. Section 4 examines three sce-
narios to demonstrate the efficacy of the proposed on-
tology in enhancing the safety and reliability of AVs.
Finally, Section 5 concludes the paper with the key
findings and potential future research directions.
2 RELATED WORKS
To date, several ontologies related to AVs have been
proposed. Schlenoff et al. (2003) developed an on-
tology to represent objects in the AV surroundings
for enhanced path planning. The ontology integrated
rules for collision damage estimation with respect to
each object, allowing the path planner to evaluate the
rules and decide whether a specific object should be
avoided. Regele (2008) introduced an ontology for
common traffic features like intersections, multi-lane
roads, opposing traffic lanes, and bi-directional lanes
to support AV decision-making processes. H
¨
ulsen
et al. (2011) proposed an extended traffic-oriented on-
tology that covers complex traffic situations involv-
ing roads with multiple lanes, vehicles, traffic lights,
and signs. Zhao et al. (2015a, 2016, 2015b) devel-
oped an ontology centered on safety improvement,
targeting intersections without traffic lights and nar-
row roads in urban areas. In collaborative naviga-
tion, an ontology was created to regulate communi-
cations between vehicles, pedestrians, and infrastruc-
tures in order to avoid collisions (Syzdykbayev et al.,
2019). A situational-awareness ontology was intro-
duced to guide the behaviors of AVs inside manufac-
turing plants (El Asmar et al., 2021). The ontology
has the capacity to analyze current and predicted sit-
uations in a smart facility where interactions between
agents are critical.
The proposed ontology is different than these
aforementioned ontologies that are intended to en-
hance path planning, traffic modeling, and situational
awareness in AVs in that its emphasis is on sensor un-
certainty. The objectives of the proposed ontology are
to provide a comprehensive model of AV navigation
in order to assess the impact of varying environments
on navigation sensors’ performance, identify the limi-
tations of navigation sensors in specific environments,
and provide standardized knowledge for safe AV nav-
igation.
3 AV NAVIGATION ONTOLOGY
3.1 Vision
An ontology that prioritizes the safety of AV nav-
igation sensors can be articulated through an anal-
ogy highlighting humans’ interaction with the envi-
ronment to navigate. In humans, five sensors—nose,
tongue, eyes, ears, and hands—collect data and con-
vey it to the brain via neurons. The brain processes
and encodes this information in perception areas, en-
abling the extraction of relevant features and aiding
in performing various tasks such as object detection,
identification, and proximity. The outcomes of cer-
tain tasks can trigger actions directed towards actua-
tors, which control the movements of hand and foot
extremities.
These outcomes may be susceptible to uncer-
tainties that can arise from either an internal data-
processing issue, such as cognitive impairment, or
an external factor, such as a severe weather condi-
tion. Given its complexity, the human brain possesses
the ability to account for these uncertainty sources by
evaluating the quality of collected data and percep-
tions. It can analyze data to detect patterns, anoma-
lies, faults, and events, and to determine appropriate
responses. However, uncertainties occasionally orig-
inate from sensor limitations as the quality of sen-
sors varies among people. Thus, people have to be
aware of their own limitations and plan environments
accordingly. For instance, people who have visual im-
pairments may opt for accessible environments, fea-
turing easily detectable and safe walking paths.
3.2 Design
To ensure the applicability and effectiveness of an on-
tology, its creation should adhere to well-established
guidelines, like the six-step process proposed by (Noy
and McGuinness, 2001). The initial step involves
identifying the scope and domain of the ontology,
which, in this case, pertains to sensor uncertainty
related to navigation in AVs. The second step en-
tails augmenting the domain knowledge by leverag-
KEOD 2023 - 15th International Conference on Knowledge Engineering and Ontology Development
232

ing concepts from existing ontologies. The proposed
ontology incorporates several concepts pertaining to
road, time, and sensor, which are widely accepted in
the AI community (El Asmar et al., 2021; Paull et al.,
2012; Syzdykbayev et al., 2019; Zhao et al., 2015b).
Section 3.3 provides further details about these con-
cepts. The third step defines important concepts and
terms to be incorporated into the ontology. This step
also establishes term interactions. The fourth step or-
ganizes these concepts hierarchically based on shared
properties. The fifth step details concept properties,
including descriptive attributes and interrelation prop-
erties. Lastly, the sixth step sets restrictions on ontol-
ogy properties.
The proposed ontology considers common navi-
gation sensors in AVs: GNSSs, inertial measurement
units (IMUs), cameras, light detection and ranging (li-
dar), and radio detection and ranging (radar). GNSSs
utilize a constellation of navigation satellites orbiting
the earth and are used for AV positioning. IMUs pro-
vide AVs with 6-DoF motion or state measurements,
including orientation, velocity, and gravity. Cameras
capture visual images that perceive color and texture
information. Lidar and radar, as range sensors, mea-
sure distances to objects in a space using laser beams
and radio waves, respectively.
Uncertainty sources in AV navigation can be cate-
gorized into sensor, algorithm, and environment. Un-
certainty in sensors is inherent to their characteristics.
GNSS performance is considerably impacted by the
surrounding conditions, such as obstacles that block
line-of-sight or cause multipath problems, satellite
availability and geometry, and the ionospheric scin-
tillation phenomenon (Yu and Liu, 2021).
IMUs, comprising accelerometers, gyroscopes,
and magnetometers, are susceptible to accumulated
error, leading to drift due to rounding of fractions dur-
ing calculations. While drifts can be resolved by aug-
menting IMUs using other sensors like GNSSs, in this
work, each sensor is conceptualized and treated inde-
pendently because each sensor has its own limitations,
and data fusion is typically handled by navigation al-
gorithms.
Camera challenges in AV navigation include lens
distortion, calibration, and environmental conditions.
Lens distortion, due to curved lenses, causes straight
lines to appear curvilinear in images. Calibration is
sensitive, and its accuracy is limited, even under con-
trolled conditions (O’Mahony et al., 2018). Environ-
mental conditions like poor illumination, fog, rain,
snow, and sun glare can easily obscure important fea-
tures in the environment. Furthermore, image quality
is determined by several technical specifications, in-
cluding lens focal length, aperture, and resolution.
In radar, the signal frequency and wavelength have
an inverse correlation; the frequency increases with
decreasing wavelength. Signal resolution and angle
could also result in scattered and incomplete represen-
tations of objects (Bilik et al., 2019). Lidar’s funda-
mental properties are field of view (FoV), range, and
resolution. The vertical and horizontal angles where
lights are transmitted determine the FoV. The term
“Range” refers to the maximum detectable distance,
while resolution denotes the point cloud density.
Navigation sensors often underperform in harsh
conditions, leading to navigation-related uncertainty.
Difficulties arise in extreme weather conditions (e.g.,
haze, rain, and snow), in the presence of obstacles,
and on complex roads, where sensors may malfunc-
tion (e.g., radar interference with conductive materi-
als and poor visibility by cameras). Therefore, un-
derstanding the tolerance and impact of such environ-
ments on AV navigation is critical for robust perfor-
mance.
Algorithm performance also contributes to AV
navigation uncertainties. Though accuracy is the pri-
mary performance metric for algorithms, even algo-
rithms with a high accuracy, typically based on ma-
chine learning models, might not ensure optimal AV
navigation in some real-world scenarios.
For a comprehensive understanding of sensor un-
certainty in AV navigation, various competency ques-
tions can be used to evaluate the proposed ontology.
Examples of such questions are as follows. What
are common AV navigation characteristics? What are
common components of AV navigation? What are
typical tasks of AV navigation? Which properties
of a sensor directly affect its performance? Which
weather conditions and road features have an inverse
effect on sensor performance? Which road features
cause sensor uncertainty? What degree of uncertainty
is associated with a navigation task under specific
environmental conditions and sensor configurations?
Which sensor is susceptible to a particular source of
uncertainty?
3.3 Model
Drawing upon a thorough examination of existing
AV ontologies and literature addressing uncertainty in
AVs (e.g., Alharbi and Karimi, 2020, 2021; El As-
mar et al., 2021; Paull et al., 2012; Syzdykbayev
et al., 2019; Zhao et al., 2015a, 2016, 2015b) as
well as a deep understanding of the functional prin-
ciples of AVs, described by Pendleton et al. (2017),
as our foundation, we devised the metadata or at-
tribute structure and established the primary concepts
and their relationships. The result is the ontology de-
Towards Developing an Ontology for Safety of Navigation Sensors in Autonomous Vehicles
233
Environment
Snow
Weather
Condition
FoggyRainySunny
densi t ypr ec i pi t at i on
angl e
typeOf
typeOf
typeOf
typeOf
hasPart
Obstacle
Pedestrian
Object
existsIn
typeOf
typeOf
Road
Lane
Sensor
IMU
GNSS
Radar
Camera
Lidar
observes
Navigation
Task
Controller
utilizes
undertakes
Autonomous
Vehicle
State
belongsTo
updates
operatesOn
Slippery
Road
Driving
Condition
typeOf
affects
time:
Temporal
Entity
tagsAnEventBy
Observation
pullsDataFr om
Component
typeOf
includes
Module
Actuator
typeOf
typeOf
implements
typeOf
Acceleration
Steering
Braking
Driving
Action
typeOf
typeOf
typeOf
controls
hasPart
typeOf
typeOf
typeOf
typeOf
typeOf
wi dt h
mar ker
dr i f t
r esol ut i on
f r equency
aper t ur e
angl e
r esol ut i on
f ocal Lengt h
pul seRat e
accur acy
r ange
channel Count
H_FoV
V_FoV
hasPart
hasPart
dept h
x- l oc at i on
y- l oc at i on
z- l oc at i on
Road
Featur e
describes
x- l oc at i on
y- l oc at i on
Localization
and
Mapping
Perception
Planning
hasPart
Internal
Sensor
typeOf
External
Sensor
typeOf
Legend
Concept
float data type property
integer data type property
improves
impairs
impairs
impairs
al gor i t hmAccur acy
degradesPerformanceOf
obscur es
obscur es
Feild of
View
shrinks
malfunctions
utilizes
assesses
misleads
Nor mal
Road
typeOf
Sun
Light
Visibility
contributesTo
Road
Light
contributesTo
Air
Quality
contributesTo
Decision
Quality
Faulty
Uncertain
show s
typeOf
typeOf
allow sMonitoring
Inclination
Cur vature
Road
Type
is-a
is-a
is-a
Urban
Rural
typeOf
typeOf
typeOf
Highway
Building
Vehicle
Tree
typeOf
typeOf
typeOf
Other
typeOf
pr oduces
x- l oc at i on
y- l oc at i on
z- l oc at i on
yaw
r ol l
pi t c h
vel oci t y
Tunnel
is-a
definesAnAreaOf
ordinary r elation
safety relation
subsumption relation
is-a
pr ec i si on
accur acy
vi si bi l i t y
di r ect i on
string data type property
shrinks
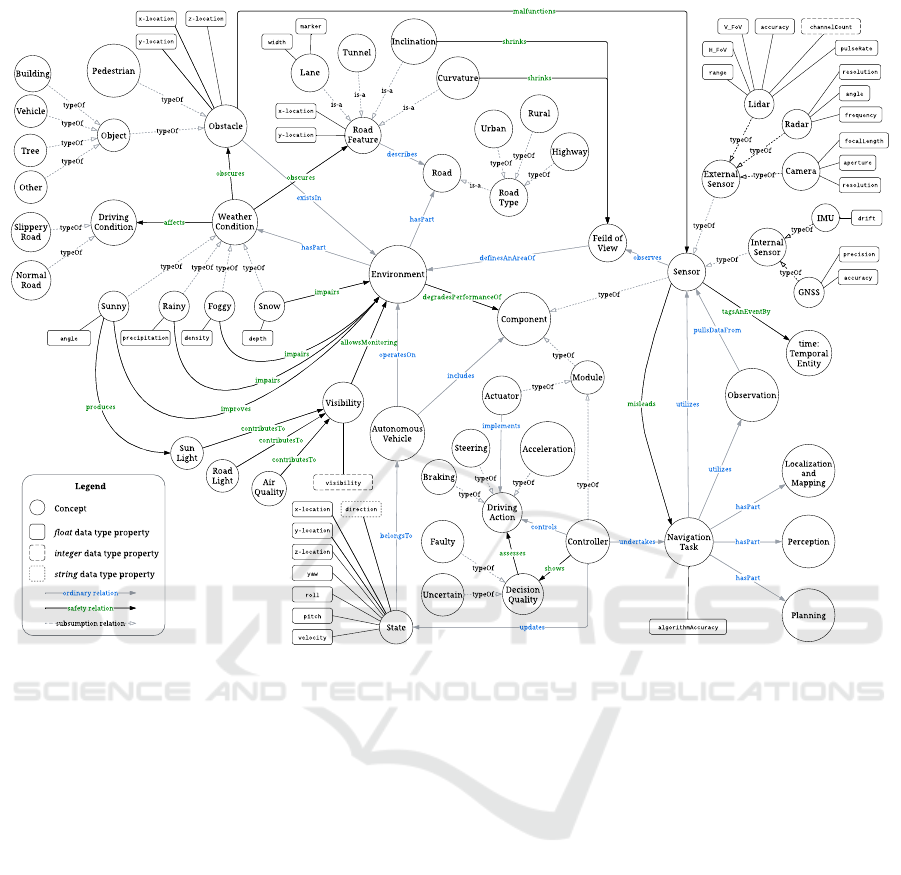
Figure 1: An ontology for safety of navigation sensors in autonomous vehicles.
picted in Figure 1. The core concept of this ontol-
ogy is Autonomous Vehicle, which holds relationships
with Environment and Component (i.e., Sensor and
Module). Although our ontology borrows some con-
cepts from existing ontologies, including Lane, Road
Type, Highway, Driving Condition, Sensor, Vehicle,
Temporal Entity, Observation, and Road, we employ
these concepts in the proposed ontology in different
ways to meet the goal of AV navigation safety.
3.3.1 Component
Component denotes the essential elements that make
up a navigation system in AVs and can be classi-
fied into Module and Sensor. Module represents the
AV components that are used to process sensor data
in order to compute and execute the vehicle’s State
and Driving Action (i.e., Acceleration, Steering, or
Braking). The typical structure of Module consists of
two units: Controller and Actuator. The former con-
trols driving actions and updates the vehicle’s State,
while the latter implements those actions. State is cap-
tured through data properties: velocity, x-location, y-
location, z-location, yaw, roll, pitch, and direction.
Sensor represents devices engineered to detect and
measure physical phenomena during navigation. In
our ontology, Sensor is grouped, based on the infor-
mation each sensor provides and its mode of opera-
tion, into: External Sensor (Lidar, Radar, and Cam-
era) and Internal Sensor (GNSS and IMU). The for-
mer provides information about the shape, position,
and movement of objects in the vehicle’s environ-
ment, and the latter monitors various internal param-
eters, such as velocity and location.
Quality of Sensor is captured in data proper-
ties: Resolution, Aperture, and FocalLength for Cam-
era; ChannelCount, PulseRate, Accuracy, FoV, and
Range for Lidar; Resolution, Frequency, and Angle
for Radar; Accuracy and Precision for GNSS; Drift
for IMU. Another concept related to Sensor (via pulls-
DataFrom) is Observation. This concept represents
the intermediate or initial measurements made by a
sensor, which are utilized by Navigation Task. Sensor
can only observe a specific Field of View that defines
an area of Environment.
KEOD 2023 - 15th International Conference on Knowledge Engineering and Ontology Development
234
3.3.2 Environment
Environment describes the surroundings in which
an AV operates. This concept includes Road and
Weather Condition that could affect the vehicle’s abil-
ity to navigate and function safely. Road has Road
Type that specifies the design and function of a road,
such as Highway, Rural, and Urban. Road can be de-
scribed by Road Feature that serves its purpose, de-
pending on the type and location of the road. For
the purpose of our ontology, we consider only fea-
tures of roads which may cause sensors to fail such
as Tunnel, Lane (i.e., marker and width), Inclina-
tion, and Curvature. Of the road features, Inclina-
tion and Curvature might shrink the Field of View of
Sensor. Weather Condition, categorized into Sunny,
Rainy, Foggy, and Snow, could adversely affect sensor
performance. These conditions are quantified using
angle, precipitation, density, and depth, respectively.
Sever weather conditions could impair Environment
and affects Driving Condition, resulting in Normal or
Slippery roads, and may also obscure Obstacles. Two
common types of Obstacle are Pedestrian and Object,
such as Building, Vehicle, Tree, among Other objects.
If obstacles, such as debris, interfere with AVs’ sen-
sors, it could potentially impact the vehicle’s ability
to accurately perceive its environment and make safe
driving decisions. Sensor also cannot observe objects
with reflective or transparent materials. As a result,
Obstacle can malfunction Sensor.
Another environment-related concept is Visibility,
which expresses how well an object can be seen in
Environment, typically expressed in terms of distance
at, or clarity with, which the object can be seen. Vis-
ibility can be affected by a variety of contributors, in-
cluding Sun Light, Road Light, and Air Quality. Good
visibility is important for a variety of reasons, includ-
ing safety and navigation since it allows for monitor-
ing Environment. Considering the complexity and dy-
namicity of Environment factors, Environment is very
likely to degrade the performance of AV Component.
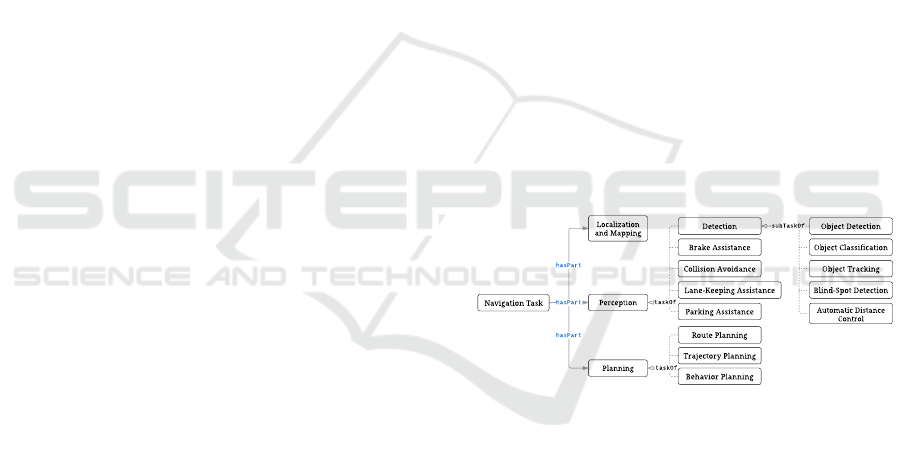
3.3.3 Navigation Tasks
The concept of Navigation Task consists of subclasses
that include Localization and Mapping (LM), Percep-
tion, and Planning (linked to Navigation Task through
hasPart). The taxonomy of Navigation Task is de-
picted in Figure 2. LM enables AVs to pinpoint
their location within the space. Perception has sev-
eral subtasks: Brake Assistance (BA) inspects the area
around AVs and helps them stop ahead of impending
crash with an obstacle; Collision Avoidance (CA) an-
alyzes AV trajectories to maneuver obstacles; Lane-
Keeping Assistance (LKA) actively aids AVs to main-
tain themselves in the center of the lane; Parking As-
sistance (PA) locates vacant parking spots, which then
parks the vehicle comfortably; Detection includes
tasks such as Object Detection (OD), Object Classifi-
cation (OC), Object Tracking (OT), Blind-Spot Detec-
tion (BSD), Automatic Distance Control (ADC), all
connected using subTaskOf. BSD monitors zones at
the sides of the vehicle, which navigation sensors can-
not sense, requiring dedicated sensors. ADC detects
the vehicle ahead and ensures that a safe distance is
maintained. Planning represents Route or RP (i.e., an
itinerary between two places), Trajectory or TP (i.e.,
a local path with respect to vehicle and space con-
straints), and Behavior or BP (i.e., driving decisions
such as lane changes). The taskOf relationship links
the descendant concepts with Perception and Plan-
ning. Each navigation task is executed by a set of
algorithms that are designed to be resilient to sensor
failures or malfunctions so that certain risks can be
mitigated. These algorithms can encounter unknown
circumstances, including sensors with manufacturing
defects, wear and tear, or software bugs, which can af-
fect their performance. Thus, Sensor can mislead the
algorithms as they could be error sources. The qual-
ity of a navigation task in the ontology is expressed
through the algorithmAccuracy data property (princi-
pally in percent).
Navigation Task
Automatic Distance
Control
Object Tracking
Brake Assistance
Collision Avoidance
Lane-Keeping Assistance
Object Classification
Blind-Spot Detection
Parking Assistance
Route Planning
hasPar t
hasPar t
t askOf
t askOf
Localization
and Mapping
Perception
Planning
Trajectory Planning
Behavior Planning
Detection Object Detection
subTaskOf
hasPar t
Figure 2: Taxonomy of navigation tasks.
3.3.4 Decision Quality
Decision Quality provides knowledge about the ex-
tent to which a decision is likely to produce a de-
sired Driving Action. Decision Quality is a mea-
sure of the effectiveness and appropriateness of a
decision, taking into account the available sensors,
their constraints, and the objectives of the situation
in which AVs operate. Sub-concepts like Faulty and
Uncertain further describe Decision Quality. Faulty
quality indicates incorrect decisions due to issues
with the sensors involved in processing that decision,
whereas Uncertain quality implies noise-induced dis-
ruptions. Navigation decisions are typically made by
Controller, which is related to Decision Quality via
the shows relationship.
Towards Developing an Ontology for Safety of Navigation Sensors in Autonomous Vehicles
235
Table 1: Ontology rules.
Impacted Navigation Tasks (F: failure, U: uncertainty)
Perception Planning
Detection
Rule # Condition LM OD OC OT BSD ADC CA LKA BA PA RP TP BP
1 AV is deployed without GNSS. F F
2 AV drives in Tunnel. U U
3 AV is deployed without IMU. U U U U U U U
4 AV is deployed without Radar. U U U U U U U U U
5 AV is deployed without Lidar. U U U U U U U U U U
6 AV is deployed without Camera. U U F U U U U U U U U
7 AV drives on Road without lane markers. U U U U
8 AV drives on a Slippery road or on extreme weather conditions
such as Snow, Foggy, or Rainy.
U U U U U U U U U U U
9 AV drives in an environment with low Visibility. U U U U U U U U U U U
10 AV navigates while facing sun glare. U U U U U U U U U U U
3.4 Constraints
Constraints indicate the conditions under which a
property (i.e., object or data properties) or a relation
holds true for a given ontological element. These con-
straints include cardinality restrictions, which specify
the number of times a property can be utilized, and
value restrictions, which specify the types of values
that a property can take, so that the relationships be-
tween entities in the ontology are consistent and logi-
cal. Beyond these domain-related constraints, we de-
signed various property constraints in our ontology to
ensure its integrity and accuracy by limiting the per-
missible ways that the properties can be used. As can
be seen in Figure 1, the ontology treats all data prop-
erties as either integer, float, or string, all defined by
the XML Schema (Biron et al., 2004)). Alongside
data types, we define the following constraints.
Constraint 1 (Autonomous Vehicle). Each Autonomous Ve-
hicle must include some navigation Component to ensure
the presence of automated driving features.
Constraint 2 (Component). Each Component must be clas-
sified as either Sensor, for collecting data, or Module, for
processing data and control.
Constraint 3 (Module). Each Module must possess a des-
ignated role of either Actuator, for physically control-
ling AVs, or Controller, for data processing and decision-
making.
Constraint 4 (Controller). Each Controller must be capa-
ble of handling one or multiple Navigation Task simultane-
ously.
Constraint 5 (Environment). Each Road must inherently
exhibit descriptive Feature.
Constraint 6 (Sensor). Each Sensor must be evaluated sep-
arately with no interactions with other sensors since each
sensor is of a different type with its own specifications.
Constraint 7 (Environment). Weather Condition must be
uniquely associated with each Environment.
Constraint 8 (Algorithm). Accuracy of each algorithm
must fall within an acceptable range, which is defined as
80 to 100 percent.
3.5 Ontology Rules
Rules represent statements that establish connec-
tions between concepts and properties and facilitate
drawing inferences and imposing restrictions on the
knowledge contained in the ontology. In particu-
lar, rules are designed to explicitly model situations
where factors could impact the quality of decisions
made by navigation algorithms in AVs. Appropriate
rules ensure that the ontology remains consistent, co-
herent, and accurate, preventing errors or inconsisten-
cies. A total of ten rules have been established in the
proposed ontology. Table 1 summarizes these rules
and what Navigation Task is affected by each rule.
Rule 1. GNSS malfunctioning considers all decisions,
made by Controller (LM or RP), Faulty.
Rule 2. Passing through a tunnel makes all decisions, made
by Controller (LM or RP), Faulty due to GNSS signal block-
age.
Rule 3. IMU malfunctioning considers all decisions, made
by Controller (LM, OT, CA, BA, PA, TP, or BP), Uncertain.
Rule 4. Radar malfunctioning considers all decisions,
made by Controller (OD, OT, BSD, ADC, CA, BA, PA, TP,
or BP), Uncertain.
Rule 5. Lidar malfunctioning considers all decisions, made
by Controller (OD, OC, OT, BSD, ADC, CA, BA, PA, TP,
or BP), Uncertain.
Rule 6. Camera malfunctioning considers all decisions,
made by Controller (LM, OD, OT, BSD, LKA, CA, BA,
PA, TP, or BP), Uncertain.
Rule 7. Navigating on a road without lane markers con-
siders all decisions, made by Controller (LM, LKA, TP, or
BP), Uncertain.
KEOD 2023 - 15th International Conference on Knowledge Engineering and Ontology Development
236

Table 2: Evaluation scenarios descriptions and results.
Scenario # Weather
Condition
Visibility Road Sensor Impacted
Sensor
Navigation
Task
Ontology
Inference
1 Normal Clear Urban GNSS GNSS LM Uncertain
Heavy traffic Camera IMU, Lidar OD Uncertain
2 Heavy rain Poor Highway
GNSS
IMU
Camera
Lidar
Radar
Camera
LM Uncertain
OD Uncertain
3 Not applicable Clear Tunnel GNSS LM Uncertain
OD Certain
Rule 8. Traveling on a slippery road or under adverse
weather conditions, such as snow, fog, or rain considers all
decisions, made by Controller (LM, OD, OC, OT, LKA,
CA, BA, PA, RP, TP, or BP), Uncertain.
Rule 9. Low-visibility conditions consider all decisions,
made by Controller (LM, OD, OC, OT, LKA, CA, BA, PA,
RP, TP, or BP), Uncertain.
Rule 10. During sunrise or sunset, an AV traveling towards
east or west and relying on visual sensors may face glare
conditions that impair their performance. Such conditions
consider all decisions, made by Controller (LM, OD, OC,
OT, LKA, CA, BA, PA, TP, or BP), Uncertain.
3.6 Ontology Development
The proposed ontology was implemented in Prot
´
eg
´
e,
a well-established open-source platform for creat-
ing ontologies (Musen, 2015). To ensure flexibil-
ity and standardization, the ontology was encoded
in the Web Ontology Language (OWL) format since
it is a W3C recommendation and is based on the
Resource Description Framework (RDF) and RDF
Schema (RDFS), facilitating its sharing and integra-
tion. Prot
´
eg
´
e along with OWL offers a comprehen-
sive range of tools for defining classes, properties,
and their relationships, and for articulating rules and
constraints. To detect inconsistencies and enable in-
ference on the ontology, we employed Pellet model
reasoner supported by Prot
´
eg
´
e (Sirin et al., 2007).
Prot
´
eg
´
e also provides DL (description logic) queries
for retrieving ontology information. The ontology
constraints were encoded as class expressions. To
specify complex logical expressions and inference
rules for reasoning over the ontology, the Semantic
Web Rule Language (SWRL) was adopted, which
facilitated automated inference and performance of
complex reasoning tasks by Pellet, enhancing the on-
tology’s effectiveness and usefulness.
The final version of the ontology consists of 71
classes, 140 object properties, and 39 data proper-
ties. The selected classes effectively capture the es-
sential features and relationships in the ontology do-
main. The properties define the relationships be-
tween the classes and articulate the constraints and
rules that govern the ontology. In addition to the
classes and properties, we also included 635 axioms
in the ontology to formally represent the relation-
ships and constraints between the classes and proper-
ties. These axioms specify the logical rules that must
be followed to maintain consistency and coherence
within the ontology, thereby enabling a more com-
plete and nuanced representation of the knowledge in
the ontology domain. To further enhance the reason-
ing capabilities of the ontology, we also encoded 10
SWRL rules. The following link can be used to gain
access to the ontology: https://github.com/MHarbi/
Safety-AV-Nav-Ontology.
4 EVALUATION
The ontology was evaluated to assess its effective-
ness in addressing AV navigation safety. This evalua-
tion involved the execution of ontology queries within
Prot
´
eg
´
e 5.6.1, installed on a MacBook Pro running
macOS 12.6.9. Model reasoning was conducted us-
ing Pellet 2.2.0. To evaluate the ontology’s effective-
ness, three scenarios were devised, as described in lit-
erature (Degbelo, 2017; Obrst et al., 2007). These
scenarios were designed to investigate specific as-
pects related to AV navigation safety. Specifically,
the competency questions guiding this evaluation as
follows. What are the implemented navigation tasks?
What is the level of uncertainty for each navigation
task? What is the identifiable source(s) of uncer-
tainty? Which sensor is impacted by these sources?
Table 2 provides descriptions for the scenarios and re-
sults. In each scenario, the AV used only LM and OD,
which were identified by the ontology successfully, to
make navigation-related decisions.
In the first scenario, an AV is navigating through
heavy urban traffic under normal weather conditions
with clear visibility. Within this context, the AV’s
cameras and GNSS operate optimally but the IMU
and lidar do not. The ontology model reasoning infers
Uncertain decisions for both navigation tasks (LM
and OD). These uncertainties are primarily attributed
Towards Developing an Ontology for Safety of Navigation Sensors in Autonomous Vehicles
237

to the lack of sensors like IMU and lidar, which play
an important role in enhancing the vehicle’s percep-
tion, particularly in intricate traffic scenarios.
The second scenario takes a place on a highway
under heavy rain. Despite having a full array of sen-
sors, the ontology still marked both navigation task
decisions as Uncertain. This is because the adverse
weather condition severely impedes visibility and,
consequently, the performance of cameras. In partic-
ular, low-visibility conditions would impair the cam-
eras’ efficacy in identifying nearby vehicles and ob-
stacles as well as localizing the AV.
The third scenario is a tunnel environment where
camera visibility and weather conditions are not fac-
tors of concern. Here, the ontology rated OD as cer-
tain but LM as Uncertain. Upon entering the tunnel,
the AV’s GNSS experiences signal degradation or to-
tal loss due to the surrounding infrastructure. This
compromises the utility of GNSS as a solo sensor
for position estimation. In contrast, the IMU con-
sistently delivers precise information on the vehicle’s
state, irrespective of GNSS signal availability. Addi-
tionally, cameras remain functional in the tunnel en-
vironment under adequate artificial illumination, al-
lowing for object and environmental feature detec-
tion. Meanwhile, the lidar sensor can supply maps
of the tunnel environment. In this scenario, despite
the temporary loss of GNSS signals inside the tunnel,
the sensor fusion algorithms can overcome potential
navigational task failures. Upon exiting, the AV re-
establishes GNSS signal and adjusts its global path
planning accordingly.
The evaluation of the ontology reveals insights
into its capacity to assess the quality and reliability
of navigation tasks under diverse and challenging cir-
cumstances. By comprehending these circumstances,
AVs can adapt proper strategies to avoid potential pit-
falls and optimise sensor resources to navigate safely
through diverse and dynamic environments.
5 CONCLUSIONS AND FUTURE
WORKS
In this paper, we propose an ontology for AV nav-
igation sensor uncertainty. Utilizing the knowledge
represented in this ontology, uncertainties from dif-
ferent sources affecting sensor performance can be as-
sessed and handled for safe operation. We evaluated
the proposed ontology with three AV driving scenar-
ios where typically navigation sensors are potentially
challenged and prone to uncertainties. Our evaluation
results indicate that the proposed ontology can detect
the uncertainty sources, the impacted sensors and the
navigation tasks to handle safety of AV navigation.
While the results of these initial validations of the
proposed ontology are promising, the ontology, like
any new ontology in any domain, needs to be tested
with a wide variety of scenarios, examined by the AV
community, and updated based on the received feed-
back.
REFERENCES
Alharbi, M. and Karimi, H. A. (2020). A global path plan-
ner for safe navigation of autonomous vehicles in un-
certain environments. Sensors, 20(21):6103–6103.
Alharbi, M. and Karimi, H. A. (2021). Context-aware sen-
sor uncertainty estimation for autonomous vehicles.
Vehicles, 3(4):721–735.
Bilik, I., Longman, O., Villeval, S., and Tabrikian, J. (2019).
The rise of radar for autonomous vehicles: Signal pro-
cessing solutions and future research directions. IEEE
signal processing Magazine, 36(5):20–31.
Biron, P. V., Permanente, K., and Malhotra, A. (2004).
XML schema part 2: Datatypes. W3C recommen-
dation, W3C. https://www.w3.org/TR/2004/REC-
xmlschema-2-20041028.
Chen, W. and Kloul, L. (2018). An ontology-based ap-
proach to generate the advanced driver assistance use
cases of highway traffic. In 10th International Joint
Conference on Knowledge Discovery, Knowledge En-
gineering and Knowledge Management - KEOD,
(IC3K 2018), pages 75–83. SciTePress.
Degbelo, A. (2017). A snapshot of ontology evaluation cri-
teria and strategies. In 13th International Conference
on Semantic Systems, page 1–8.
El Asmar, B., Chelly, S., and F
¨
arber, M. (2021). Aware: An
ontology for situational awareness of autonomous ve-
hicles in manufacturing. In Proceedings of the AAAI
Workshops on Commonsense Knowledge Graphs
(CSKGs).
Gyllenhammar, M., Johansson, R., Warg, F., Chen, D.,
Heyn, H.-M., Sanfridson, M., S
¨
oderberg, J., Thors
´
en,
A., and Ursing, S. (2020). Towards an operational
design domain that supports the safety argumentation
of an automated driving system. In 10th European
Congress on Embedded Real Time Systems (ERTS
2020), TOULOUSE, France.
H
¨
ulsen, M., Z
¨
ollner, J. M., and Weiss, C. (2011). Traffic in-
tersection situation description ontology for advanced
driver assistance. In 2011 IEEE Intelligent Vehicles
Symposium (IV), pages 993–999.
Jesenski, S., Stellet, J. E., Schiegg, F., and Z
¨
ollner, J. M.
(2019). Generation of scenes in intersections for the
validation of highly automated driving functions. In
2019 IEEE Intelligent Vehicles Symposium (IV), pages
502–509. IEEE.
Kalra, N. and Paddock, S. M. (2016). Driving to safety:
How many miles of driving would it take to demon-
strate autonomous vehicle reliability? Transportation
Research Part A: Policy and Practice, 94:182–193.
KEOD 2023 - 15th International Conference on Knowledge Engineering and Ontology Development
238

Krajewski, R., Moers, T., Nerger, D., and Eckstein, L.
(2018). Data-driven maneuver modeling using gen-
erative adversarial networks and variational autoen-
coders for safety validation of highly automated ve-
hicles. In 2018 21st International Conference on In-
telligent Transportation Systems (ITSC), pages 2383–
2390. IEEE.
Mueller, A. S., Cicchino, J. B., and Zuby, D. S. (2020).
What humanlike errors do autonomous vehicles need
to avoid to maximize safety? Journal of Safety Re-
search, 75:310–318.
Musen, M. A. (2015). The prot
´
eg
´
e project: A look back and
a look forward. AI Matters, 1(4):4–12.
National Highway Traffic Safety Administration (2022).
Traffic safety facts 2020 data: Summary of motor ve-
hicle crashes. Report DOT HS 813 369, U.S. Depart-
ment of Transportation.
Noy, N. F. and McGuinness, D. L. (2001). Ontology de-
velopment 101: A guide to creating your first ontol-
ogy. Report KSL-01-05 and SMI-2001-0880, Stan-
ford knowledge systems laboratory.
Obrst, L., Ceusters, W., Mani, I., Ray, S., and Smith, B.
(2007). The evaluation of ontologies. In Baker,
C. J. O. and Cheung, K.-H., editors, Semantic Web:
Revolutionizing Knowledge Discovery in the Life Sci-
ences, pages 139–158. Springer US, Boston, MA.
O’Mahony, N., Campbell, S., Krpalkova, L., Riordan,
D., Walsh, J., Murphy, A., and Ryan, C. (2018).
Computer vision for 3d perception. In Arai, K., ,
Kapoor, S., , and Bhatia, R., editors, Intelligent Sys-
tems and Applications, IntelliSys 2018, pages 788–
804. Springer International Publishing.
Paull, L., Severac, G., Raffo, G. V., Angel, J. M., Boley,
H., Durst, P. J., Gray, W., Habib, M., Nguyen, B., Ra-
gavan, S. V., et al. (2012). Towards an ontology for
autonomous robots. In 2012 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
1359–1364.
Pendleton, S. D., Andersen, H., Du, X., Shen, X., Megh-
jani, M., Eng, Y. H., Rus, D., and Ang, M. H. (2017).
Perception, planning, control, and coordination for au-
tonomous vehicles. Machines, 5(1):6.
Regele, R. (2008). Using ontology-based traffic models for
more efficient decision making of autonomous vehi-
cles. In Fourth International Conference on Auto-
nomic and Autonomous Systems (ICAS’08), pages 94–
99.
Riedmaier, S., Ponn, T., Ludwig, D., Schick, B., and Dier-
meyer, F. (2020). Survey on scenario-based safety
assessment of automated vehicles. IEEE Access,
8:87456–87477.
Schlenoff, C., Balakirsky, S., Uschold, M., Provine, R.
O. N., and Smith, S. (2003). Using ontologies to
aid navigation planning in autonomous vehicles. The
Knowledge Engineering Review, 18(3):243–255.
Sirin, E., Parsia, B., Grau, B. C., Kalyanpur, A., and Katz,
Y. (2007). Pellet: A practical owl-dl reasoner. Journal
of Web Semantics, 5(2):51–53. Elsevier - Software
Engineering and the Semantic Web.
Syzdykbayev, M., Hajari, H., and Karimi, H. A. (2019).
An ontology for collaborative navigation among au-
tonomous cars, drivers, and pedestrians in smart cities.
In 2019 4th International Conference on Smart and
Sustainable Technologies (SpliTech), pages 1–6.
Yu, S. and Liu, Z. (2021). The ionospheric condition and
gps positioning performance during the 2013 tropical
cyclone usagi event in the hong kong region. Earth,
Planets and Space, 73(1):66.
Zhao, L., Ichise, R., Mita, S., and Sasaki, Y. (2015a).
Core ontologies for safe autonomous driving. In 14th
International Semantic Web Conference (Posters &
Demonstrations).
Zhao, L., Ichise, R., Sasaki, Y., Liu, Z., and Yoshikawa, T.
(2016). Fast decision making using ontology-based
knowledge base. In 2016 IEEE Intelligent Vehicles
Symposium (IV), pages 173–178.
Zhao, L., Ichise, R., Yoshikawa, T., Naito, T., Kakinami,
T., and Sasaki, Y. (2015b). Ontology-based deci-
sion making on uncontrolled intersections and narrow
roads. In 2015 IEEE Intelligent Vehicles Symposium
(IV), pages 83–88.
Zhou, J. and del Re, L. (2017). Identification of critical
cases of adas safety by fot based parameterization of
a catalogue. In 2017 11th Asian Control Conference
(ASCC), pages 453–458. IEEE.
Towards Developing an Ontology for Safety of Navigation Sensors in Autonomous Vehicles
239
