
CFRLI-IDM: A Counterfactual Risk Level Inference Based Intelligence
Driver Model for Extremely Aggressive Cut-in Scenario in China
Yongqiang Li, Yang Lv, Quan Wang and Qiankun Miao
Neolix, China
Keywords:
Counterfactual Inference, Control Barrier Function, Unmanned Delivery Vehicles, Aggressive Cut-in.
Abstract:
When conducting unmanned delivery tasks on side roads in China, unmanned delivery vehicles sometimes
face a dual challenge of aggressive cut-ins and reckless followers driving closely behind them. To address
this challenge, we propose a cut-in response strategy named Counterfactual Risk Level Inference-based Intel-
ligence Driver Model (CFRLI-IDM). The CFRLI-IDM method utilizes an improved Intelligent Driver Model
(IDM) as the initial longitudinal control strategy for the ego vehicle. It then leverages counterfactual inference
to construct an optimization problem, aiming to derive a longitudinal control strategy that satisfies the ego
vehicle’s risk threshold constraint while maximizing compliance with the rear vehicle’s maximum acceptable
braking deceleration constraint, with minimal changes to the initial strategy. To evaluate the effectiveness
of our proposed method, we design an extremely challenging cut-in simulation scenario incorporating the
aforementioned factors and validate the algorithm within this simulated environment. Experimental results
demonstrate that our method prioritizes the safety of the ego vehicle while ensuring the safety of the rear ve-
hicle as much as possible, substantially reducing the likelihood of safety accidents occurring in such complex
scenarios.
1 INTRODUCTION
The development of e-commerce has provided vast
opportunities space for China’s unmanned delivery
business, while also posing an urgent demand for
the advancement of autonomous driving technol-
ogy. With the continuous increase in labor costs, e-
commerce giants such as JD.com, Meituan, and Al-
ibaba have begun to enter the field of unmanned de-
livery to compete for this one trillion dollar market
(Li et al., 2020). As one of the new forces of un-
manned driving in China, Neolix has also conducted
long-term and outstanding exploration in this field.
This article focuses on a complex scenario faced
by Neolix in its actual operation: that is, in areas
with narrow passage spaces such as urban traffic aux-
iliary roads, unmanned delivery vehicles encounter
aggressive cut-in during morning and evening peak
hours. For example, the cut-in distance of the front
vehicle may be less than 0.2 meters. However, at
this time, due to traffic congestion and busy roads,
unmanned delivery vehicles often have other human
drivers closely following behind them (electric vehi-
cles, tricycles, bicycles, etc.) This scenario poses a
serious challenge to the longitudinal control strategy
of unmanned delivery vehicles: if the unmanned de-
livery vehicle does not respond in a timely manner or
outputs a relatively small braking amount, it is diffi-
cult to cope with the possible sudden braking of the
cut-in vehicle. On the contrary, if the unmanned de-
livery vehicle responds too early (exceeding the ex-
pectations of the driver of the rear vehicle) or provides
too much braking amount, it is high likely to cause
the rear end collision due to the follower’s delayed
response.
In this scenario, the appropriate constraints is a
relatively difficult problem to determine. Existing
methods may rely on precise predictions or overly
simplistic assumptions of the front vehicle, and em-
ploy certain fixed constraints to construct optimiza-
tion problems, such as being at least 0.2 meters away
from the nearest vehicle in front (Bageshwar et al.,
2004; Yoon et al., 2021). This will result in a larger
braking amount output when the constraint is vio-
lated. To address this issue, we creatively propose
a dynamic constraint method, which constructs this
optimization problem based on the result of counter-
factual reasoning.
The overall idea and architecture of the method
are shown in Fig. 1. Firstly, the acceleration of an
unmanned delivery vehicle is calculated based on the
initial strategy (such as the previous version of the
Li, Y., Lv, Y., Wang, Q. and Miao, Q.
CFRLI-IDM: A Counterfactual Risk Level Inference Based Intelligence Driver Model for Extremely Aggressive Cut-in Scenario in China.
DOI: 10.5220/0012209900003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 273-280
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
273

Figure 1: Overall Block Diagram of the CFRLI-IDM Method: We utilize counterfactual inference to deduce the braking
intensity of the lead vehicle and the acceptable braking intensity for the following vehicle. This enables the formulation of
an optimization problem that incorporates dynamic constraints. By adopting this approach, we ensure the safety of the ego
vehicle while simultaneously the safety of the following vehicle to the greatest extent possible.
longitudinal control strategy of the unmanned deliv-
ery vehicle), and secondly, we introduce counterfac-
tual reasoning to infer the braking timing and max-
imum braking amount of the front vehicle, and then
the optimization problem based on this inference is
solved to obtain a revised output. Finally, a longitu-
dinal control strategy is obtained to ensure the safety
of the ego vehicle while ensuring the safety of the fol-
lowing vehicle as much as possible.
The proposed fusion of counterfactual inference
and an optimization based approach, has the follow-
ing advantages:
1. Considered the coping strategy when the safety
threshold of the ego vehicle is not satisfied
2. A counterfactual reasoning-based method for in-
ferring the braking timing and maximum braking
amount of the preceding vehicle is proposed
3. Building optimization problems based on counter-
factual reasoning rather than hand-designed fixed
constraints improves the adaptability of this algo-
rithm
4. The solution to the problem can be obtained by
analytical solution, reducing the dependence on
complex optimizers
In the rest of this paper, Section 2 introduces the
RSS model and the method of SafeIDM model, Sec-
tion 3 introduces the definitions of two hypotheses
used in counterfactual reasoning and related coun-
terfactual reasoning method, Section 4 formulates
the optimization problem for our longitudinal control
strategy of the unmanned delivery vehicle, and the al-
gorithm is given in Section 5, Section 6 describes the
design of the simulation scenario and the results of
our method, and finally, Section 7 concludes the pa-
per.
2 SafeIDM MODEL
2.1 IDM Model
The IDM model is a longitudinal dynamic model pro-
posed by Martin Treiber and Arne Kesting in 2010 for
microscopic traffic flow simulation (Treiber and Kest-
ing, 2010). Due to its low parameter count, strong in-
terpretability and smooth acceleration output, it has
been widely used in both simulation scenario gen-
eration and real-world vehicle testing over the past
decade. The acceleration calculation formula is as fol-
lows:
a
IDM
(s,v,∆v) =
dv
dt
= a[1 −(
v
v
0
)
δ
−(
s
∗
(v,∆v)
s
)
2
] (1)
In this formula, a
IDM
represents the acceleration
calculated based on the IDM model, s represents the
distance between the ego vehicle and the front vehi-
cle, v represents the speed of the ego vehicle, ∆v rep-
resents the speed difference between the ego vehicle
and the front vehicle, a represents the desired accel-
eration, v
0
represents the desired speed, s
∗
(v,∆v) =
s
0
+ vT +
v∆v
2
√
ab
represents the desired safe distance,
and δ represents a parameter.
The IDM model generally works well in the ma-
jority of cases, but there are exceptions, and the ag-
gressive cut-in problem discussed in this article is one
of them. From the acceleration calculation formula
of the IDM model, it can be observed that in aggres-
sive cut-in situations, the front vehicle distance s be-
comes very small, while the desired safe distance is
related to the ego vehicle’s own speed and the param-
eter T. Once the speed is high (resulting in a larger
desired safe distance), the term−(
s
∗
(v,∆v)
s
)
2
outputs a
large negative value, which leads to abrupt braking of
the vehicle.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
274

To improve the IDM model, we introduce the
RSS (Responsibility-Sensitive Safety) model and use
it to calculate a more reasonable desired safe distance
(Shalev-Shwartz et al., 2017) (Shalev-Shwartz et al.,
2018).
2.2 RSS Model
Definition 1. (Safe longitudinal distance — same di-
rection) A longitudinal distance between a car c
r
that
drives behind another car c
f
, where both cars are
driving at the same direction, is safe w.r.t. a response
time ρ if for any braking of at most a
max,brake
per-
formed by c
f
, if c
r
will accelerate by at most a
max,accel
during the response time and from there on will brake
by at least a
min,brake
until a full stop then it won’t col-
lide with c
f
.
Lemma 2. Let c
r
be a vehicle which is be-
hind c
f
on the longitudinal axis. Let ρ,
a
max,brake
,a
max,accel
,a
min,brake
be as in Definition 1.
Let v
r
,v
f
be the longitudinal velocities of the cars.
Then, the minimal safe longitudinal distance between
the front-most point of c
r
and the rear-most point of
c
f
is:
d
min
=
v
r
ρ +
1
2
a
max,accel
ρ
2
+
(v
r
+ρa
max,accel
)
2
2a
min,brake
−
v
2
f
2a
max,brake
+
(2)
2.3 SafeIDM
According to the definition of the minimum longitu-
dinal safe distance in RSS, it is possible for the min-
imum safe distance d
min
to be very small when the
current front vehicle speed is high. Using this defi-
nition of safe distance can greatly improve the issue
of abrupt braking caused by high speed but small cut-
in distances front vehicle in the original IDM model.
The desired following distance in SafeIDM can be de-
fined as follows:
s
∗
= 1.1 ∗d
min
+ s
0
(3)
Compared to the original IDM model, the
SafeIDM model provides a more reasonable acceler-
ation output when dealing with aggressive cut-in sit-
uations. However, this does not guarantee the safety
of the vehicle since the IDM model assumes that the
acceleration output is highly smoothed (typically us-
ing a fourth-order approximation). Additionally, the
SafeIDM model does not consider the safety of the
rear vehicle. We will discuss viable methods for en-
suring safety in longitudinal safety model in Chapter
4 and provide the complete algorithm in Chapter 5.
3 COUNTERFACTUAL
INFERRENCE
The longitudinal safety distance of an unmanned de-
livery vehicle is influenced by various factors, Fig.
2. In the context of this article, inferring the maxi-
mum braking amount of the front vehicle can signifi-
cantly contribute to determining an effective strategy
for the ego vehicle to adopt.To address this concern,
we present two hypotheses:
Hypothesis 1. When the front vehicle merges into
the lane occupied by the ego vehicle, it is essential
to consider the potential occurrence of accidents and
the associated liability concern. If, during the merg-
ing maneuver, the distance between the front vehicle
and the ego vehicle is too small, and the front vehicle
abruptly applies the brakes (resulting in a calculated
minimum longitudinal safety distance exceeding the
current distance), the responsibility for the ensuing
accident does not rest with the ego vehicle(as this can
be categorized as a deliberate collision).
Hypothesis 2. When following the ego vehicle, the
rear vehicle should consider the maximum braking
amount that the ego vehicle may adopt to maintain
a safe distance as much as possible. Compared with
unmanned delivery vehicles, human drivers have rich
driving experience in complex interaction scenarios,
such as aggressive cut-in scenario. Therefore, human
drivers adopt the practice of closely following due to
the presumption that, in this situation, the ego vehi-
cle does not require the implementation of excessive
braking strategies (in the vast majority of cases).
Based on Hypothesis 1, we can deduce the max-
imum braking amount that the front vehicle can uti-
lize in aggressive cut-in scenarios by solving the fol-
lowing equation in reverse, resulting in the calculated
d
min
exactly matching the current longitudinal dis-
tance between the ego vehicle and the front vehicle.
Similarly, based on Hypothesis 2, we can deduce
the maximum braking amount that the rear vehicle as-
sume the ego vehicle may take.
In order to not always use the worst-case assump-
tion, we propeses a graded risk strategy for the in-
ferrence of the braking amount of the front vehicle,
which means the braking behavior can be happend in
the condition of the longitudinal safety distance is sat-
isfied when the braking amount is in the set of [-0.5,
-1, -1.5, -2.0, -2.5, -3, -3.5, -4.0, -4.5, -5] as small as
possible(from the perspective of absolute values), if
the longitudinal distance between the ego vehicle and
the front vehicle is larger than the longitudinal safe
distance calculated by the assumption of the front ve-
hicle would brake at the maximum braking amount of
CFRLI-IDM: A Counterfactual Risk Level Inference Based Intelligence Driver Model for Extremely Aggressive Cut-in Scenario in China
275

Figure 2: Operation Scenario.
-5, the maximum braking amount of the front vehicle
would be assumpted as -5, and then the longitudinal
risk level of the ego vehicle is calculated based on this
inference result.
4 LONGITUDINAL SAFETY
MODEL
4.1 Optimization Problem
To ensure that the acceleration output of the ego ve-
hicle satisfies the safety constraints, we need to con-
sider the output of the SafeIDM model from previous
steps as the initial guess for the problem. Based on
counterfactual inference, we can obtain the minimum
safety distance and the acceptable risk level threshold
for the ego vehicle. Using these values, we construct
the optimization problem as follows:
argmin
a
1
2
∥
a −a
ini
∥
2
s.t. c(s,a) ≤C
(4)
Here, a
ini
represents the output of the SafeIDM
model, and c denotes the longitudinal safety signal.
We represent it as the ratio of the minimum safety
distance to the current distance. c(s,a) =
d
min
d
cur
repre-
sents the risk level that will occur at the next moment
when taking action a in the current state. d
c
ur repre-
sents the current distance. C represents the acceptable
risk level threshold (in this paper, we use C = 1/1.1).
The solution to this optimization problem allows us
to obtain actions that satisfy the risk level threshold
constraints while minimizing changes to the original
actions.
To solve this problem, we can approximate the
dynamic model of the longitudinal risk level using a
first-order approximation. This allows us to transform
the optimization problem into a quadratic program-
ming problem, namely:
a
∗
= argmin
a
1
2
∥
a −a
ini
∥
2
s.t. c(s)+ g ∗a ≤C
(5)
4.2 Risk Level Dynamic Model
Assuming we have knowledge of the maximum brak-
ing action taken by the preceding vehicle (inferred
from counterfactual reasoning), we can calculate the
minimum safe distance required based on the RSS
model for the current state. Then, based on our def-
inition of risk, we can determine the risk level of the
ego vehicle in the current state. At this point, if we are
given the action taken by the ego vehicle and assume
that the preceding vehicle will brake with the maxi-
mum braking action inferred from counterfactual rea-
soning, we can calculate the state and the risk level
for the next moment (assuming the preceding vehicle
continues to brake with the maximum braking action).
Figure 3: The relationship among speed, acceleration, and
risk level is manifested in the following manner: when con-
sidering the velocities of the ego vehicle and the lead ve-
hicle, as well as the lead vehicle’s braking intensity, the
ego vehicle adapts its acceleration accordingly. As a con-
sequence of this adaptation, there is a linear variation in the
risk level over a brief future timeframe.
To approximate the dynamics of the risk level in
a first-order manner, we sample within the range of
accelerations available to the ego vehicle (e.g., with
a step size of 0.1). By doing so, we can obtain the
risk level for the next moment (e.g., at a time inter-
val of 0.2 seconds). By performing linear regression
on this data, we can obtain the first-order approxima-
tion coefficient ”g” used in the previous formula. To
achieve a better linear approximation, we normalize
the changes in acceleration and the changes in the risk
levels, the result of this approximation can be seen
in Fig. 3. This involves transforming the aforemen-
tioned first-order approximation into an incremental
representation as follows:
c(s
′
) ≈ c(s) + g(s; w)
T
a
(6)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
276

(c
′
−c)−min(c
′
−c)
max(c
′
−c)−min(c
′
−c)
=
acc−min
acc
max
acc
−min
acc
∗g
(7)
When formulating the optimization problem, we
utilize reverse normalization to obtain the constraint
representation of the quadratic programming prob-
lem. This is expressed as follows:
c
′
= g
a−acc
min
acc
max
−acc
min
∗(max(c
′
−c) −min(c
′
−c)) + c + min(c
′
−c)
(8)
Since the current risk level at the present moment
is a constant, the maximum change in the safety signal
is typically brought about by the ego vehicle apply-
ing the maximum braking action, while the minimum
change in the safety signal is caused by the ego ve-
hicle applying the maximum acceleration. Therefore,
the aforementioned equation can be simplified as fol-
lows:
c
′
= g
a−acc
min
acc
max
−acc
min
∗(max(c
′
) −min(c
′
)) + min(c
′
)
(9)
4.3 Optimization Problem Solution
Since the dimensionality of actions in our problem
is one-dimensional, representing the acceleration of
an unmanned delivery vehicle, and the constraint is
a single linear constraint, this optimization problem
can be simplified to a quadratic function optimization
problem. It can be solved using an analytical solution
to obtain the global optimal solution for the problem
(Dalal et al., 2018).
Firstly, we can write down the Lagrange equation
for the optimization problem based on the constraint
and objective function. The Lagrange equation takes
the following form:
L(a,λ) =
1
2
∥
a −a
ini
∥
2
+ λ ∗(c(s) + g ∗a −C)
(10)
Since both the objective function and the constraint
are convex, the optimal solution to the problem must
satisfy the Karush-Kuhn-Tucker (KKT) conditions,
which are as follows:
▽
a
L = a
∗
−a
ini
+ λ
∗
∗g = 0
(11)
λ
∗
∗(c + g ∗a
∗
−C) = 0
(12)
Therefore, we obtain the analytical expression for the
optimal solution. If λ=0, then a
∗
= a
ini
. Otherwise,
we have c + g ∗a
∗
−C = 0. Substituting this equation
into equation (11), we can derive:
λ
∗
= [
g ∗a
ini
+ c(s) −C
g
T
g
]
+
(13)
We have utilized normalization to calculate g and
substituted it into the result of reverse normalization.
As a result, we obtain the final computation:
λ
∗
= [
g
a
ini
−acc
min
acc
max
−acc
min
∗(max(c
′
)−min(c
′
))+min(c
′
)−C
g
T
g
]
+
(14)
If λ
∗
= 0, it implies that no adjustments need to
be made to the initial output. Otherwise, the optimal
solution is given by:
a
∗
= a
ini
−λ
∗
i
g
(15)
Due to the analytical form of this solution, we can
conveniently modify the initial values of the SafeIDM
output to ensure that the final output meets our accept-
able risk level, without relying on complex optimiz-
ers.
5 ALGORITHM
In this section, the complete solution for the compli-
cate cut-in scenario is proposed, this method is based
on the basic models introduced in the preceding sec-
tions and a method to identify the cut-in intention of
the front vehicle.
Firstly, we use SafeIDM model as the initial lon-
gitudinal control strategy of the unmanned delivery
vehicle and use the definition of lateral safe distance
which is also defined by the RSS model to recognize
the cut-in vehilce, that is, the front vehicle will be con-
sidered as the cut-in vehilce if the lateral safe distance
between the ego vehicle and the front vehilce is not
satisfied, and then the cut-in coping strategy will be
activate.
Secondly, the counterfactual inference method is
used to infer the the braking timing and maximum
braking amount of the front vehicle. If the current
longitudinal risk level is higher than the longitudinal
risk threshhold that we can accept, the same counter-
factual inferrence method is used to infer the maxi-
mum braking amount that the rear vehicle can accept,
then the output acceleration of the ego vehilce will
be equal to a scaling factor less than 1.0 (in this pa-
per, 0.5 is selected) multiply the maximum accept-
able braking amount of the rear vehicle. Otherwise,
an optimization problem is constructed based on the
inference results, and the control quantity given by the
initial strategy is corrected.
We use the longitudinal safety model to correct
the output of the initial longitudinal control policy, if
the corrected output is greater than zero or the abso-
lute value of the output is smaller than the absolute
value of the acceptable maximum braking amount of
the rear vehicle, the output is directly sent to the low-
level control system. Otherwise, the second corrected
output is obtained as the acceptable maximum brak-
ing amount of the rear vehicle is used as the initial
guess of the longitudinal safety model, the samller ab-
solute value of these two outputs is sent to the control
system.
CFRLI-IDM: A Counterfactual Risk Level Inference Based Intelligence Driver Model for Extremely Aggressive Cut-in Scenario in China
277
The steps of the proposed algorithm CFRLI-IDM
can be summarized as follows.
1. Determine whether the lateral safety distance be-
tween the ego vehicle and the front vehicle meets
the requirements, if it is ture, the initial outout is
unchanged, otherwise, go to step 2.
2. Determine whether the longitudinal safety dis-
tance between the ego vehicle and the front vehi-
cle is greater than the needed longitudinal safety
distance calculated at the assumption of the front
vehicle’s maximum braking amount is -0.5, if it is
true, go to step 4, otherwise, go to step 3.
3. Obtain the acceptable maximum braking amount
of the rear vehicle using the counterfactual in-
ferrence mothod, and output 0.5 multiply this
amount.
4. Determine the maximum braking amount of the
front vehicle, and obtain the output of longitudi-
nal safety model, if the output is greater than zero
or its absolute value is smaller than the absolute
value of the acceptable maximum braking amount
of the rear vehicle, send the output to control sys-
tem, otherwise, go to step 5.
5. Use the acceptable maximum braking amount of
the rear vehicle as the initial guess as the opti-
mization control problem, and output the smaller
absolute value between this output and the output
of step 4.
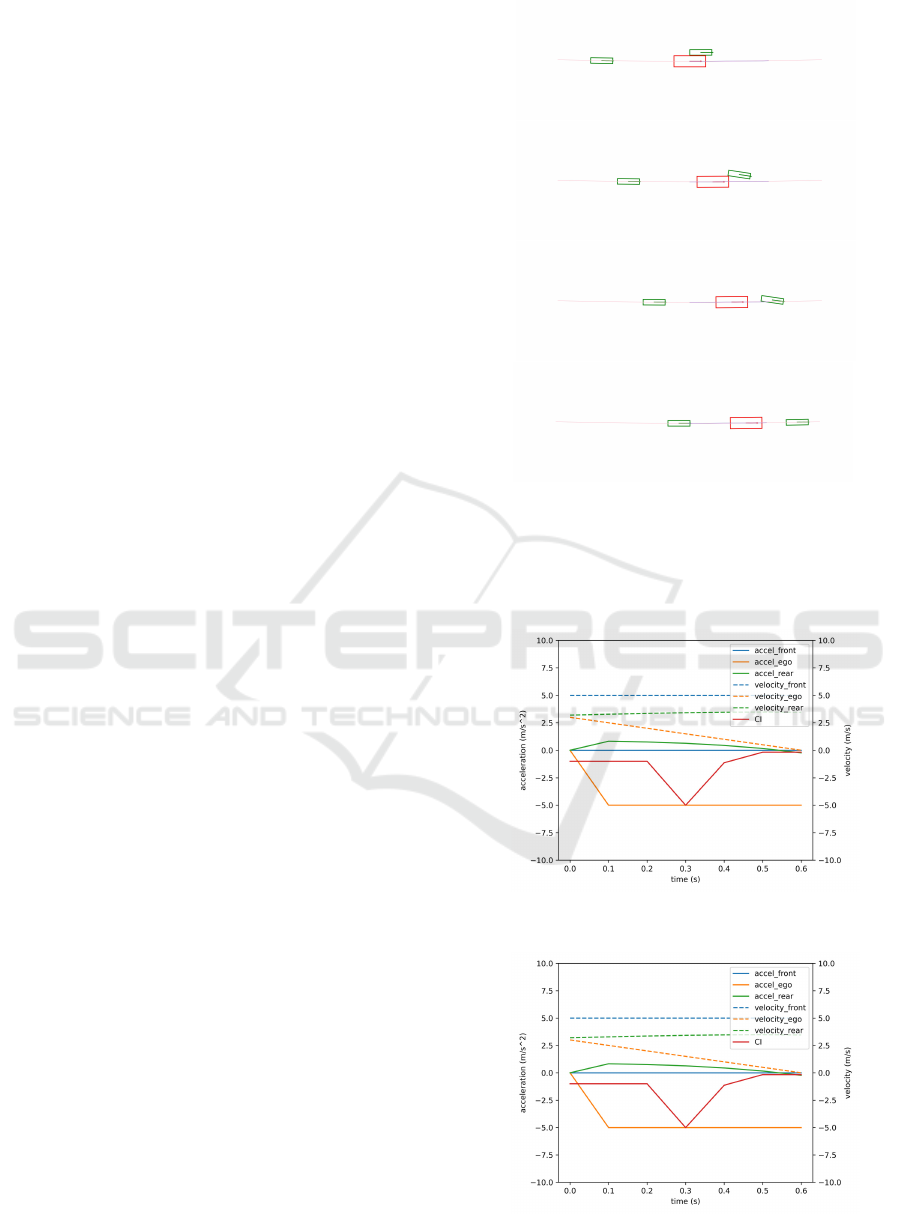
6 EXPERIMENT
We consider an aggressive cut-in scenario, where the
initial speed of ego vehicle is 3m/s, the initial speed
of front vehicle is 5m/s, so the front vehicle will take
over ego vehicle and then take the cut-in action, after a
few moment, the front vehicle braking with a random
deceleration between -1 and -5, See Fig. 4.
Since the high risk in the scene is mainly related to
the acceleration output by the ego vehicle, we tested
the acceleration control amount given by different al-
gorithms (IDM, SafeIDM, longitudinal safety model,
CFRIL-IDM), as shown in Fig. 5 to Fig. 11.
It can be seen that although in the original IDM
model, we used a very small T=0.5s, when the aggres-
sive cut-in occurs, the IDM model still gives a large
amount of braking, far exceeding the rear car toler-
ance level, Fig. 5. Since then, the IDM model lacks
protection against the possible sudden braking of the
vehicle in front, so it has been in a high-risk area, Fig.
11.
SafeIDM performs better than the original IDM
when the vehicle in front has a certain cut-in distance,
Figure 4: The simulation scenario involves three vehicles,
namely the front vehicle, rear vehicle, and ego vehicle. In
this scenario, the front vehicle performs an abrupt brak-
ing action after performing a cut-in maneuver from the left
side of the ego vehicle. The ego vehicle’s longitudinal con-
trol strategy adopts the CFRLI-IDM model, while the IDM
model is utilized for the longitudinal control of the rear ve-
hicle.
Figure 5: IDM model gives very large amount of breaking
in extreme condition.
Figure 6: Both the SafeIDM and IDM models are inefficient
in dealing with extreme situations.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
278

Figure 7: Under non-extreme conditions, the IDM model
produces excessive braking levels beyond the acceptable
range for the rear vehicle.
Figure 8: The SafeIDM model outperforms the IDM model
in non-extreme situations by providing smoother braking
levels for ego vehicle.
Fig. 7, Fig. 8, but it is difficult for SafeIDM to give
a good solution when the vehicle in front is too ag-
gressive, such as the detection distance is less than
0.1 meters, Fig. 6.The longitudinal safety model per-
forms well when the vehicle in front cuts in, but as the
vehicle in front brakes suddenly, in order to ensure the
safety of the ego vehicle, the amount of braking given
is still beyond the tolerance of the vehicle behind, Fig.
9. In addition, due to the adoption of the worst-case
Figure 9: The longitudinal safety model outperforms the
conventional IDM model in emergency situations but lacks
sufficient protection for the rear vehicle.
Figure 10: The CFRLI-IDM model effectively protects both
the ego vehicle and the rear vehicle in emergency situations.
assumption for the vehicle in front, the response was
not timely, resulting in the risk level not being con-
trolled below the threshold of its own acceptable risk
level, Fig. 11. As a comparison, the CFRIL-IDM
model has always considered the safety of the rear ve-
hicle. Compared with other models, it has the small-
est violation of the expectation of the rear vehicle, and
gradually makes the braking amount of the ego vehi-
cle consistent with the expectation of the rear vehicle,
Fig. 10. At the same time, its own risk level is gradu-
ally reduced below the risk threshold, Fig. 11.
7 CONCLUSION
We propose a coping strategy for aggressive cut-in
scenarios during rush hours in China by leveraging
counterfactual inference. This strategy aims to en-
hance the adaptability of unmanned delivery vehi-
cles operating in complex urban environments. Our
method demonstrates the successful application of
causal reasoning within unmanned delivery scenarios.
By employing causal inference, we acquire dynamic
constraints for optimizing vehicle cooperation and
significantly reduce the likelihood of rear-end colli-
sions, a prevalent issue found in accident reports from
Waymo. While our method performs effectively in
this scenario, there is room for improvement through
data-driven approaches. These approaches can be uti-
lized to obtain a more refined initial strategy or in-
corporate additional information, such as the acceler-
ation of the front-front vehicle (Pourabdollah et al.,
2017; Chen et al., 2023). Further research can ex-
plore these aspects to enhance the capabilities of our
proposed strategy.
CFRLI-IDM: A Counterfactual Risk Level Inference Based Intelligence Driver Model for Extremely Aggressive Cut-in Scenario in China
279
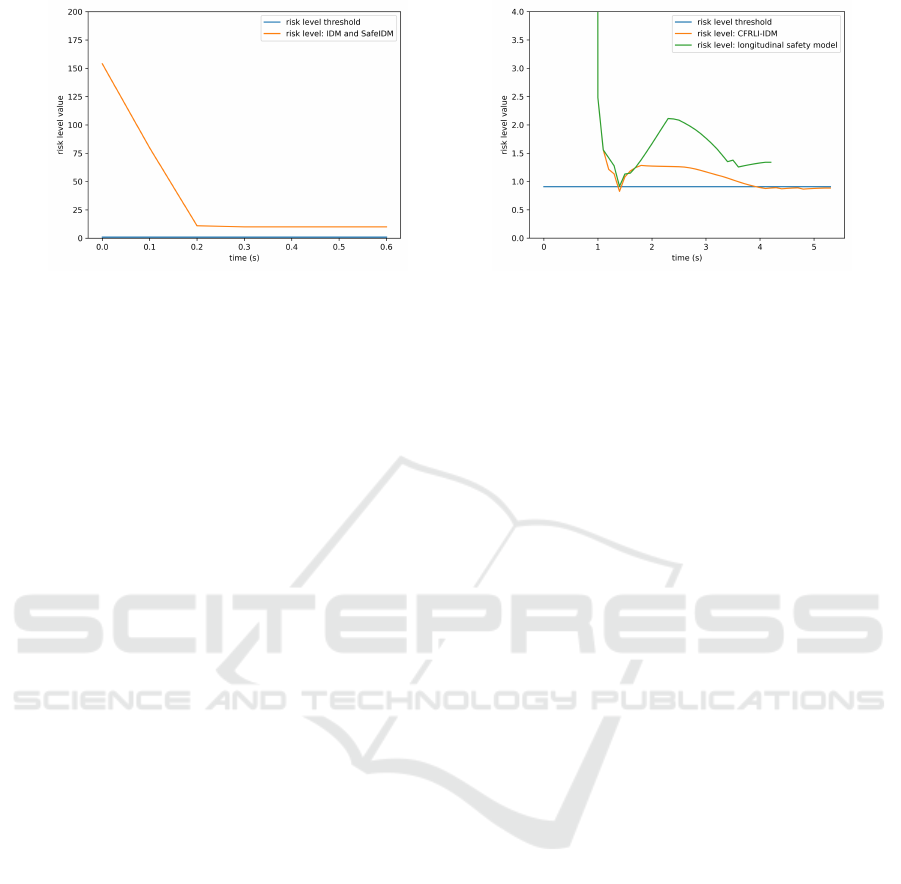
Figure 11: The IDM model and SafeIDM model cannot eliminate the risk of sudden braking from the front vehicle, while the
longitudinal safety model partially reduces the risk but does not eliminate it completely. In contrast, the CFRLI-IDM model
maintains a lower risk level during cut-in situations and gradually eliminates the risk of sudden braking from the front vehicle.
REFERENCES
Bageshwar, V. L., Garrard, W. L., and Rajamani, R. (2004).
Model predictive control of transitional maneuvers for
adaptive cruise control vehicles. IEEE Transactions
on Vehicular Technology, 53(5):1573–1585.
Chen, X., Zhu, M., Chen, K., Wang, P., Lu, H., Zhong, H.,
..., and Wang, Y. (2023). Follownet: A comprehen-
sive benchmark for car-following behavior modeling.
arXiv preprint arXiv:2306.05381.
Dalal, G., Dvijotham, K., Vecerik, M., Hester, T., Paduraru,
C., and Tassa, Y. (2018). Safe exploration in continu-
ous action spaces. arXiv preprint arXiv:1801.08757.
Li, B., Liu, S., Tang, J., Gaudiot, J. L., Zhang, L., and Kong,
Q. (2020). Autonomous last-mile delivery vehicles in
complex traffic environments. Computer, 53(11):26–
35.
Pourabdollah, M., Bj
¨
arkvik, E., F
¨
urer, F., Lindenberg, B.,
and Burgdorf, K. (2017). Calibration and evaluation
of car following models using real-world driving data.
In In 2017 IEEE 20th International conference on
intelligent transportation systems (ITSC), pages 1–6.
IEEE.
Shalev-Shwartz, S., Shammah, S., and Shashua, A. (2017).
On a formal model of safe and scalable self-driving
cars. arXiv preprint arXiv:1708.06374.
Shalev-Shwartz, S., Shammah, S., and Shashua, A. (2018).
Vision zero: can roadway accidents be eliminated
without compromising traffic throughput. arXiv
preprint.
Treiber, M. and Kesting, A. (2010). An open-source micro-
scopic traffic simulator. IEEE Intelligent Transporta-
tion Systems Magazine, 2(3):6–13.
Yoon, Y., Kim, C., Lee, J., and Yi, K. (2021). Interaction-
aware probabilistic trajectory prediction of cut-in ve-
hicles using gaussian process for proactive control of
autonomous vehicles. IEEE Access, 9:63440–63455.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
280
