
Fixed-Time Tracking Control for a Class of Nonlinear Systems via
Command Filtered Backstepping
Wen-Nian Qi
1 a
and Rui-Qi Dong
2,∗
1
School of Mechanical Engineering and Automation, Harbin Institute of Technology (Shenzhen), Shenzhen, P.R. China
2
School of Mechanical Engineering, Tsinghua University, Beijing, P.R. China
Keywords:
Nonlinear Systems, Fixed-Time Stability, Command Filtered Backstepping.
Abstract:
The fixed-time tracking control problem is addressed for a class of nonlinear systems. A novel command
filtered backstepping control law including virtual control signals, fixed-time command filters, and error com-
pensation signals is constructed. By the introduced fixed-time command filters, the problem of “explosion of
complexity” caused by backstepping approach is avoided. Simultaneously, the filtering errors produced by the
introduced fixed-time command filters are eliminated by the designed error compensation signals. It is proven
that the resulted closed-loop tracking control system under the proposed command filtered backstepping con-
trol law is fixed-time stable.
1 INTRODUCTION
The control of nonlinear systems has been widely in-
vestigated, and many effective control methods, in-
cluding backstepping control (Kanellakopoulos et al.,
1991; Morawiec et al., 2020; Mazenc and Bliman,
2006), adaptive control (Tang et al., 2003), neural
network control (Wang and Huang, 2005), etc, have
been proposed. Among these control methods, the
backstepping technique is widely utilized due to its
superiority in dealing with mismatched uncertainties
and disturbances (Kanellakopoulos et al., 1991). In
recent works (Feng et al., 2020; Zhao et al., 2021;
Tong et al., 2020), the backstepping approach was
further incorporated with finite-time control, fault-
tolerant control, and adaptive control. It should be
noted that the backstepping control needs to construct
virtual control laws step by step, and the derivative of
virtual control signal in the last step is required to con-
struct the virtual control law in the current step. Ac-
cordingly, repeatedly differentiating the virtual con-
trol signals causes the problem of “explosion of com-
plexity” (Chen and Wang, 2021; Swaroop et al.,
2000), and the complexity becomes severe especially
for high-order dynamics. To address this problem, a
dynamic surface control (DSC) approach was firstly
proposed in (Swaroop et al., 2000) to avoid differenti-
a
https://orcid.org/0000-0002-4627-1151
∗
Corresponding author.
ating virtual control signals by introducing first-order
filters in the backstepping design procedure. A draw-
back of DSC is that the filtering errors caused by the
introduced first-order filters are ignored. To compen-
sate the filtering errors, a command filtered backstep-
ping was proposed in (Farrell et al., 2009), where the
command filters were used to approximate the deriva-
tives of virtual control signals, and the compensation
mechanism were proposed to reduce the influence of
filtering errors. Further, the command filtered back-
stepping was united with adaptive technique or neural
network approximation method in (Dong et al., 2011;
Shen and Shi, 2015), respectively, to eliminate the in-
fluence of uncertain nonlinearities.
The aforementioned command filtered backstep-
ping control algorithms in (Farrell et al., 2009; Dong
et al., 2011; Shen and Shi, 2015) merely achieve
infinite-time convergence property of the closed-loop
system. From the practical point of view, many en-
gineering systems are often required to achieve fast
tracking control in finite time. In view of this require-
ment, finite-time control methods combining with
command filtered backstepping technique have been
developed for many nonlinear systems. Typical works
can be found in (Yu et al., 2018; Li, 2019; Fu et al.,
2020; Wang et al., 2019; Cheng et al., 2023; Wang
et al., 2021). In (Yu et al., 2018), the finite-time com-
mand filtered backstepping tracking controller was
constructed for a class of nonlinear systems in strict-
feedback form. In (Li, 2019), the parametric uncer-
50
Qi, W. and Dong, R.
Fixed-Time Tracking Control for a Class of Nonlinear Systems via Command Filtered Backstepping.
DOI: 10.5220/0012210200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 50-57
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

tainties and actuator faults were taken into considera-
tion, and the finite-time tracking control law was de-
veloped by adaptive command filtered backstepping
approach. In (Fu et al., 2020), the tracking control for
uncertain switched nonlinear systems was considered,
and a neural-network based command filtered back-
stepping controller was developed to achieve finite-
time convergence of the closed-loop system. It should
be pointed out that the initial conditions of the system
limit the settling time ensured by finite-time control
approaches (Guo et al., 2021). To solve the problem
of initial condition dependence, the fixed-time con-
trol approach, which can guarantee that settling time
is only depended on the parameters of the closed-loop
system, have been developed for various control sys-
tems. In (Tian et al., 2017; Su and Zheng, 2019), the
fixed-time control laws were constructed to stabilize
second-order systems. In (Tian et al., 2018), the back-
stepping control approach was applied for high-order
integrator systems, and the fixed-time tracking control
was achieved. To our knowledge, the fixed-time com-
mand filtered backstepping tracking control is barely
investigated for high-order nonlinear systems.
Motivated by the aforementioned discussions, the
tracking control for a class of nonlinear systems is in-
vestigated in this paper. The control objective of this
paper is to construct a control law such that the output
of the nonlinear system can track a reference signal in
fixed time. To achieve this control goal, a new fixed-
time command filtered backstepping control method
is proposed. Compared with most existing works, the
main contributions are presented as follows.
(1) The proposed control law is constructed by
combining fixed-time control approach and command
filtered backstepping technique. Compared with the
contribution in (Yu et al., 2018), in which the track-
ing error converges to a region around the origin in fi-
nite time, the proposed control law in this work makes
sure that the tracking error converges to the origin in
fixed time.
(2) The fixed-time filter is introduced to replace
the finite-time filter in (Yu et al., 2018; Li, 2019; Fu
et al., 2020; Wang et al., 2019; Cheng et al., 2023;
Wang et al., 2021). Therefore, the output of the intro-
duced fixed-time filter can estimate the derivative of
the virtual control law and the problem of “explosion
of complexity” is obviated.
(3) Compared with (Yu et al., 2018; Li, 2019; Fu
et al., 2020; Wang et al., 2019; Cheng et al., 2023;
Wang et al., 2021), novel compensation mechanism
is constructed to timely reduce the negative effect of
the filtering error.
The rest of this paper is organized as follows. The
system description and preliminaries are provided in
Section 2. The control law design and stability anal-
ysis are presented in Section 3. An example is con-
ducted in Section 4 to verify the effectiveness and
advantages of the proposed control law. Finally, the
conclusion of this paper is drawn in Section 5.
Notations. Throughout this paper, R denotes the
real number, R
n
denotes the n dimensional real vector,
and
|
·
|
denotes the absolute value. For two integers
a ≤ b, I[a,b] denotes the set
{
a, a + 1, ..., b
}
. For
any scalar x ∈ R, define sig
γ
(x) =sign(x)
|
x
|
γ
where
sign(·) is the standard sign function. For any vector
x = [x
1
x
2
··· x
n
]
T
∈ R
n
,
∥
x
∥
is the 2-norm of the vec-
tor x. Furthermore, define
sign(x) = [sign(x
1
) sign(x
2
) ·· · sign(x
n
)]
T
,
and
sig
γ
(x) = [sig
γ
(x
1
) sig
γ
(x
2
) ·· · sig
γ
(x
n
)]
T
.
2 SYSTEM DESCRIPTION AND
PRELIMINARIES
Consider the following n-th order nonlinear systems
˙x
i
= f
i
(¯x
i
) + g
i
(¯x
i
)x
i+1
˙x
n
= f
n
(x) + g
n
(x)u
y =x
1
(1)
where i ∈ I[1,n − 1], x = [x
1
x
2
·· · x
n
]
T
∈ R
n
is the
state vector, ¯x
i
= [x
1
x
2
·· · x
i
]
T
∈ R
n
; u ∈ R and y ∈ R
are the input and output of the system, respectively.
The functions f
i
(·) and g
i
(·), i ∈ I[1,n], are assumed
to be known. Denote the reference signal and its first-
order derivatives by y
0
∈ R, ˙y
0
∈ R, respectively. Both
y
0
and ˙y
0
are assumed to be bounded and known.
The control objective of this paper is to construct
the control law u for system (1) such that the output
y tracks the reference signal y
0
in a fixed time. The
following assumption on the n-th order nonlinear sys-
tems (1) is presented.
Assumption 1. For system (1), there exists an open
set Ω
0
⊂ R
n
which includes the origin and the initial
condition x (0). (1) f
(m)
i
(·) and g
(m)
i
(·) are bounded
in the closed set
¯
Ω
0
for i ∈ I[1,n − 1], m ∈ I[1, n − i];
(2) f
n
(·) and g
n
(·) and their first-order derivatives
are bounded in the closed set
¯
Ω
0
.
In what follows, some useful definitions and lem-
mas are introduced.
Lemma 1. (Hardy et al., 1952) For x
i
> 0, i ∈ I[1,N]
Fixed-Time Tracking Control for a Class of Nonlinear Systems via Command Filtered Backstepping
51

there holds
n
∑
i=1
x
γ
i
≥
n
∑
i=1
x
i
!
γ
, if 0 < γ ≤ 1,
n
∑
i=1
x
γ
i
≥ n
1−γ
n
∑
i=1
x
i
!
γ
, if γ > 1.
Considered an autonomous system
˙x = f (x, u) , x (0), x ∈ U ⊂ R
n
, (2)
where f : U × R
+
→ R
n
is continuous on an open
neighborhood U of the origin x = 0. Suppose for any
initial condition x (0) ∈ U, there is a unique solution
x (t,x (0)) of system (2).
Lemma 2. (Polyakov, 2012) For the system (2), if
there is a Lyapunov function V (x) with initial value
V (x (0)), and some real numbers a > 0, b > 0, 0 <
p < 1, and q > 1, such that
˙
V (x) ≤ −aV
p
−bV
q
, then
the origin of the system (2) is fixed-time stable, and
the convergence time is bounded by
T ≤
1
a(1 − p)
+
1
b(q − 1)
.
3 CONTROL LAW DESIGN AND
STABILITY ANALYSIS
In this section, a command filtered backstepping con-
trol law is constructed for the system (1) to ensure
that the output y tracks the reference signal y
0
in a
fixed time, and the fixed time stability of the closed-
loop system are analysed theoretically.
3.1 Control Law Design
Following the command filtered backstepping ap-
proach, the coordinate transformation is introduced as
z
1
= y −y
0
, (3)
z
i
= x
i
−
¯
α
i
, (4)
where i ∈ I[2,n], and
¯
α
i
is the output of a fixed-time
command filter with the virtual control law α
i
as the
input. The fixed-time command filter is introduced as
follows.
(
˙
¯
α
i
=−λ
1i
sig
1
2
(
¯
α
i
−α
i
)−λ
2i
sig
γ
(
¯
α
i
− α
i
)+φ
i
,
˙
φ
i
=−λ
3i
sign
φ
i
−
˙
¯
α
i
−λ
4i
sig
2γ−1
(
¯
α
i
−α
i
).
(5)
where i ∈ I[2,n], γ > 1, and λ
1i
, λ
2i
, λ
3i
, and λ
4i
are positive parameters. The fixed time convergence
property of the signals
¯
α
i
and ϕ
i
are shown in the fol-
lowing Lemma.
Lemma 3. (Basin et al., 2017) For the system (5)
with α
i
as the input signal, and positive parameters
λ
1i
, λ
2i
, λ
3i
, λ
4i
, and γ > 1, the outputs
¯
α
i
and ϕ
i
converge to α
i
and
˙
α
i
in a fixed time, respectively.
In what follows, the details of the fixed-time com-
mand filtered backstepping control law design are
presented in n steps.
Step 1: design of virtual control law α
2
. From (1)
and (3), the time derivative of z
1
is
˙z
1
= f
1
+ g
1
x
2
− ˙y
0
= f
1
+ g
1
(x
2
−
¯
α
2
+
¯
α
2
− α
2
+ α
2
) − ˙y
0
= f
1
+ g
1
(z
2
+
¯
α
2
− α
2
+ α
2
) − ˙y
0
. (6)
When we construct virtual control law α
2
, a compen-
sation mechanism is needed to reduce the influence of
the filtering error
¯
α
2
− α
2
. The compensation signal
ξ
1
is proposed as
˙
ξ
1
= − l
11
sig
p
(ξ
1
) − l
21
sig
q
(ξ
1
)
+ g
1
(
¯
α
2
− α
2
) + g
1
ξ
2
, (7)
where l
11
> 0, l
21
> 0, 0 < p < 1, and q > 1 are some
designed parameters. ξ
2
is another compensation sig-
nal to reduce the influence of the error
¯
α
3
− α
3
, and
will be designed in the next step.
Define the compensated tracking errors as
χ
1
= z
1
− ξ
1
, (8)
χ
2
= z
2
− ξ
2
. (9)
By using (6) and (7), the time derivative of χ
1
is
˙
χ
1
=˙z
1
−
˙
ξ
1
=g
1
(χ
2
+ α
2
) + f
1
− ˙y
0
+ l
11
sig
p
(ξ
1
) + l
21
sig
q
(ξ
1
). (10)
For the first subsystem composed of (7) and (10),
a Lyapunov candidate function can be chosen as
V
1
=
1
2
χ
2
1
+
1
2
ξ
2
1
. (11)
Taking the time derivative of V
1
yields
˙
V
1
=χ
1
˙
χ
1
+ ξ
1
˙
ξ
1
=χ
1
(g
1
χ
2
+ g
1
α
2
+ f
1
− ˙y
0
+ l
11
sig
p
(ξ
1
)
+l
21
sig
q
(ξ
1
)) + ξ
1
(−l
11
sig
p
(ξ
1
)
−l
21
sig
q
(ξ
1
) + g
1
(
¯
α
2
− α
2
) + g
1
ξ
2
). (12)
Then for the first subsystem composed of (7) and (10),
a virtual control law α
2
can be constructed as
α
2
=
1
g
1
(−k
11
sig
p
(χ
1
)−k
21
sig
q
(χ
1
)+ ˙y
0
− f
1
), (13)
where k
11
> 0 and k
21
> 0 are some designed param-
eters.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
52

Substituting (13) into (12) yields
˙
V
1
= − k
11
|
χ
1
|
1+p
− k
21
|
χ
1
|
1+q
+ g
1
χ
1
χ
2
+ l
11
χ
1
sig
p
(ξ
1
) + l
21
χ
1
sig
q
(ξ
1
) − l
11
|
ξ
1
|
1+p
− l
21
|
ξ
1
|
1+q
+ g
1
(
¯
α
2
− α
2
)ξ
1
+ g
1
ξ
1
ξ
2
. (14)
Step i, i ∈ I[2,n − 1]: design of virtual control law
α
i+1
. From (1) and (4), the time derivative of z
i
is
˙z
i
= f
i
+ g
i
x
i+1
−
˙
¯
α
i
= f
i
+ g
i
(z
i+1
+
¯
α
i+1
− α
i+1
+ α
i+1
) −
˙
¯
α
i
. (15)
Proceeding similarly, to reduce the influence of the
filtering error
¯
α
i+1
−α
i+1
, the compensation signal ξ
i
is designed as
˙
ξ
i
= − l
1i
sig
p
(ξ
i
) − l
2i
sig
q
(ξ
i
) + g
i
(
¯
α
i+1
− α
i+1
)
+ g
i
ξ
i+1
− g
i−1
ξ
i−1
, (16)
where l
1i
> 0 and l
2i
> 0 are some designed param-
eters, and ξ
i+1
is another compensation signal to re-
duce the influence of the error
¯
α
i+2
− α
i+2
in the next
step.
Define the compensated tracking errors as
χ
i
=z
i
− ξ
i
, (17)
χ
i+1
=z
i+1
− ξ
i+1
, (18)
By using (15) and (16), the time derivative of χ
i
is
˙
χ
i
=g
i
α
i+1
+ f
i
−
˙
¯
α
i
+ l
1i
sig
p
(ξ
i
) + l
2i
sig
q
(ξ
i
)
+ g
i
χ
i+1
+ g
i−1
ξ
i−1
. (19)
For the i-th subsystem composed of (16) and (19),
a Lyapunov candidate function can be chosen as
V
i
=
1
2
χ
2
i
+
1
2
ξ
2
i
. (20)
From (16) and (19), the time derivative of V
i
is ob-
tained as
˙
V
i
=χ
i
g
i
α
i+1
+ f
i
−
˙
¯
α
i
+ l
1i
sig
p
(ξ
i
) + l
2i
sig
q
(ξ
i
)
+g
i
χ
i+1
+g
i−1
ξ
i−1
)+ξ
i
(−l
1i
sig
p
(ξ
i
)−l
2i
sig
q
(ξ
i
)
+g
i
(
¯
α
i+1
− α
i+1
) + g
i
ξ
i+1
− g
i−1
ξ
i−1
). (21)
Then the virtual control law α
i+1
can be constructed
as
α
i+1
=
1
g
i
(−k
1i
sig
p
(χ
i
) − k
2i
sig
q
(χ
i
)
+
˙
¯
α
i
− f
i
− g
i−1
z
i−1
, (22)
where k
1i
> 0 and k
2i
> 0 are some designed parame-
ters.
Substituting (22) into (21) yields
˙
V
i
= − k
1i
|
χ
i
|
1+p
− k
2i
|
χ
i
|
1+q
− l
1i
|
ξ
i
|
1+p
− l
2i
|
ξ
i
|
1+q
+ l
1i
χ
i
sig
p
(ξ
i
) + l
2i
χ
i
sig
q
(ξ
i
) + g
i
χ
i
χ
i+1
− g
i−1
χ
i−1
χ
i
+ g
i
(
¯
α
i+1
− α
i+1
)ξ
i
+ g
i
ξ
i
ξ
i+1
− g
i−1
ξ
i−1
ξ
i
. (23)
Step n: design of actual control law u. The time
derivative of z
n
is
˙z
n
= f
n
+ g
n
u −
˙
¯
α
n
. (24)
The compensation signal ξ
n
is designed as
˙
ξ
n
= −l
1n
sig
p
(ξ
n
) − l
2n
sig
q
(ξ
n
) − g
n−1
ξ
n−1
. (25)
where l
1n
> 0 and l
2n
> 0 are some designed param-
eters. The compensated tracking error χ
n
is defined
as
χ
n
= z
n
− ξ
n
. (26)
By using (24) and (25), the time derivative of χ
n
is
˙
χ
n
=g
n
u + f
n
−
˙
¯
α
n
+ l
1n
sig
p
(ξ
n
) + l
2n
sig
q
(ξ
n
)
+ g
n−1
ξ
n−1
. (27)
For the n-th subsystem composed of (25) and (27),
a Lyapunov candidate function can be chosen as
V
n
=
1
2
χ
2
n
+
1
2
ξ
2
n
. (28)
Taking the time derivative of V
n
yields
˙
V
n
= χ
n
g
n
u + f
n
−
˙
¯
α
n
+ l
1n
sig
p
(ξ
n
) + l
2n
sig
q
(ξ
n
)
+g
n−1
ξ
n−1
) + ξ
n
(−l
1n
sig
p
(ξ
n
) − l
2n
sig
q
(ξ
n
)
−g
n−1
ξ
n−1
). (29)
Then the virtual control law α
i+1
can be constructed
as
u =
1
g
n
−k
1n
sig
p
(χ
n
) − k
2n
sig
q
(χ
n
) +
˙
¯
α
n
− f
n
− g
n−1
z
n−1
). (30)
where k
1n
> 0 and k
2n
> 0 are some designed param-
eters.
Substituting the control law u into (29), yields
˙
V
n
=−k
1n
|
χ
n
|
1+p
−k
2n
|
χ
n
|
1+q
−l
1n
|
ξ
n
|
1+p
−l
2n
|
ξ
n
|
1+q
+ l
1n
sig
p
(ξ
n
) + l
2n
sig
q
(ξ
n
) − g
n−1
χ
n−1
χ
n
− g
n−1
ξ
n−1
ξ
n
. (31)
In this subsection, the virtual control laws (13)
and (22) are constructed step by step, and the fixed-
time command filter (5) are provided to avoid repeat-
edly calculating the time derivative of the virtual con-
trol laws. Besides, the compensation mechanism pro-
vided by (7), (16) and (25) are provided to compen-
sate the filtering errors caused by the fixed-time com-
mand filter (5). Finally, the actual control law u are
constructed as in (30).
3.2 Stability Analysis
The fixed-time stability of the closed-loop system can
be concluded in the following theorem.
Fixed-Time Tracking Control for a Class of Nonlinear Systems via Command Filtered Backstepping
53

Theorem 1. For the system (1) satisfies Assumption
1, if the fixed-time command filter is chosen as in (5),
the virtual control laws are constructed as in (13) and
(22), and the compensation mechanism are design as
in (7), (16) and (25), then the control law can be de-
signed as in (30) such that the tracking error z
1
in (3)
converges to origin in a fixed-time.
Proof. For the closed-loop system, a Lyapunov func-
tion candidate can be selected as
V =
n
∑
i=1
V
i
,
Then by using (14), (23), and (31), the time deriva-
tive of V is
˙
V = −
n
∑
i=1
k
1i
|
χ
i
|
1+p
+ k
2i
|
χ
i
|
1+q
+
n
∑
i=1
(l
1i
χ
i
sig
p
(ξ
i
)
+l
2i
χ
i
sig
q
(ξ
i
)) −
n
∑
i=1
l
1i
|
ξ
i
|
1+p
+ l
2i
|
ξ
i
|
1+q
+
n−1
∑
i=1
g
i
(
¯
α
i+1
− α
i+1
)ξ
i
. (32)
According to Young’s inequality(Deng and Krsti
´
c,
1997), there holds
l
1i
χ
i
sig
p
(ξ
i
) ≤
l
1i
1 + p
|
χ
i
|
1+p
+
pl
1i
1 + p
|
ξ
i
|
1+p
,
l
2i
χ
2
sig
q
(ξ
i
) ≤
l
2i
1 + q
|
χ
i
|
1+q
+
ql
2i
1 + q
|
ξ
i
|
1+q
. (33)
Substituting (33) into (32) and properly choosing pa-
rameters k
1i
>
l
1i
1+p
, k
2i
>
l
2i
1+q
, l
1i
>
pl
2i
1+p
, and l
2i
>
ql
2i
1+q
, yield
˙
V ≤ −
n
∑
i=1
¯
k
1i
|
χ
i
|
1+p
+
¯
k
2i
|
χ
i
|
1+q
−
n
∑
i=1
¯
l
1i
|
ξ
i
|
1+p
+
¯
l
2i
|
ξ
i
|
1+q
+
n−1
∑
i=1
g
i
(
¯
α
i+1
− α
i+1
)ξ
i
(34)
where
¯
k
1i
= k
1i
−
l
1i
1+p
,
¯
k
2i
= k
2i
−
l
2i
1+q
,
¯
l
1i
= l
1i
−
pl
2i
1+p
,
and
¯
l
2i
= l
2i
−
ql
2i
1+q
. Besides, according to Lemma 3,
the filtering error
¯
α
i+1
− α
i+1
= 0 can be achieved in
a fixed time T
1i
by properly choosing the parameters
λ
1i
, λ
2i
, λ
3i
, λ
4i
, and γ. Then for t ≥ max{T
1i
}, there
holds
˙
V ≤ −
n
∑
i=1
¯
k
1i
|
χ
i
|
1+p
+
¯
l
1i
|
ξ
i
|
1+p
−
n
∑
i=1
¯
k
2i
|
χ
i
|
1+q
+
¯
l
2i
|
ξ
i
|
1+q
. (35)
Denoting ϖ
1
= min
i
{
¯
k
1i
,
¯
l
1i
}, ϖ
2
= min
i
{
¯
k
2i
,
¯
l
2i
}, and
applying Lemma 1, there holds
˙
V ≤ − ϖ
1
n
∑
i=1
χ
2
i
+ ξ
2
i
!
1+p
2
− ϖ
2
n
1−q
2
n
∑
i=1
χ
2
i
+ ξ
2
i
!
1+q
2
= −
¯
ϖ
1
V
1+p
2
−
¯
ϖ
2
V
1+q
2
. (36)
where
¯
ϖ
1
= 2
1+p
2
ϖ
1
,
¯
ϖ
2
= 2
1+q
2
n
1−q
2
ϖ
2
. According
to Lemma 2, inequality (36) implies that χ
i
= 0 and
ξ
i
= 0, i ∈ I[1,N], are achieved in a fixed time T
2
,
which is bounded by
T
2
≤ max
i
{
T
1i
}
+
1
¯
ϖ
1
(1 − p)
+
1
¯
ϖ
2
(q − 1)
,
Since z
1
= χ
1
+ ξ
1
, then it can be obtained that the
tracking error z
1
= 0 is achieved in a fixed time T
2
.
Thus the proof is completed.
In this section, the fixed-time tracking control law
(30) is constructed based on the virtual control laws,
fixed-time filters, and compensation mechanism. The
problem of “explosion of complexity” is avoided by
the introduced fixed-time filter (5). The influence of
the filtering errors is reduced timely by the proposed
compensation mechanism as in (7) and (25). More-
over, it is proved in Theorem 1 that the fixed-time
tracking performance of the closed-loop system is en-
sured by the proposed control law.
4 SIMULATION RESULTS
In this section, the proposed fixed-time control law
will be compared with the finite-time control law
in (Yu et al., 2018) via an electromechanical sys-
tem, composed of a single-link manipulator and mo-
tor. The dynamics of electromechanical system is de-
scribed as follows.
D ¨q + B ˙q +Nsin(q) = τ
M
˙
τ + Hτ = D(u) −K
m
˙q
y = q
(37)
where q, ˙q, and ¨q are the position, velocity, and accel-
eration of the link, respectively, τ is the motor shaft
angle, and u represent the motor torque. The parame-
ters are chosen as D = 1, B = 1, M = 0.05, H = 0.5,
N = 10, and K
m
= 10.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
54
Define x
1
= q, x
2
= ˙q, and x
3
= τ/D, the dynamics
(37) can be written as
˙x
1
= x
2
˙x
2
= −x
3
−
N
D
sin(x
1
) +
B
D
x
2
˙x
3
=
K
m
MD
x
2
+
H
M
x
3
+ u
(38)
The reference signal is
y
0
= 0.5sin(t) + 0.5sin(0.5t).
The designed parameters of virtual control law,
actual control law, and compensation signals are taken
as k
1i
= k
2i
= 5, p = 0.6, q = 1.05, and l
1i
= l
2i
= 2,
i ∈ I[1, 3].
The initial condition of the system states, com-
mand filters, and compensation signals are taken as
[x
1
(0) x
2
(0) x
3
(0)] = [4 3 2],
[
¯
α
i
(0) ϕ
i
(0)] = [0 0],i = 2,3,
[ξ
1
(0) ξ
2
(0) ξ
3
(0)] = [0 0 0].
0 2 4 6 8 10
0
1
2
3
4
Figure 1: Trajectories of y and y
0
.
0 2 4 6 8 10
0
1
2
3
4
4 6 8 10
-4
-2
0
2
10
-4
Figure 2: Tracking error y − y
0
.
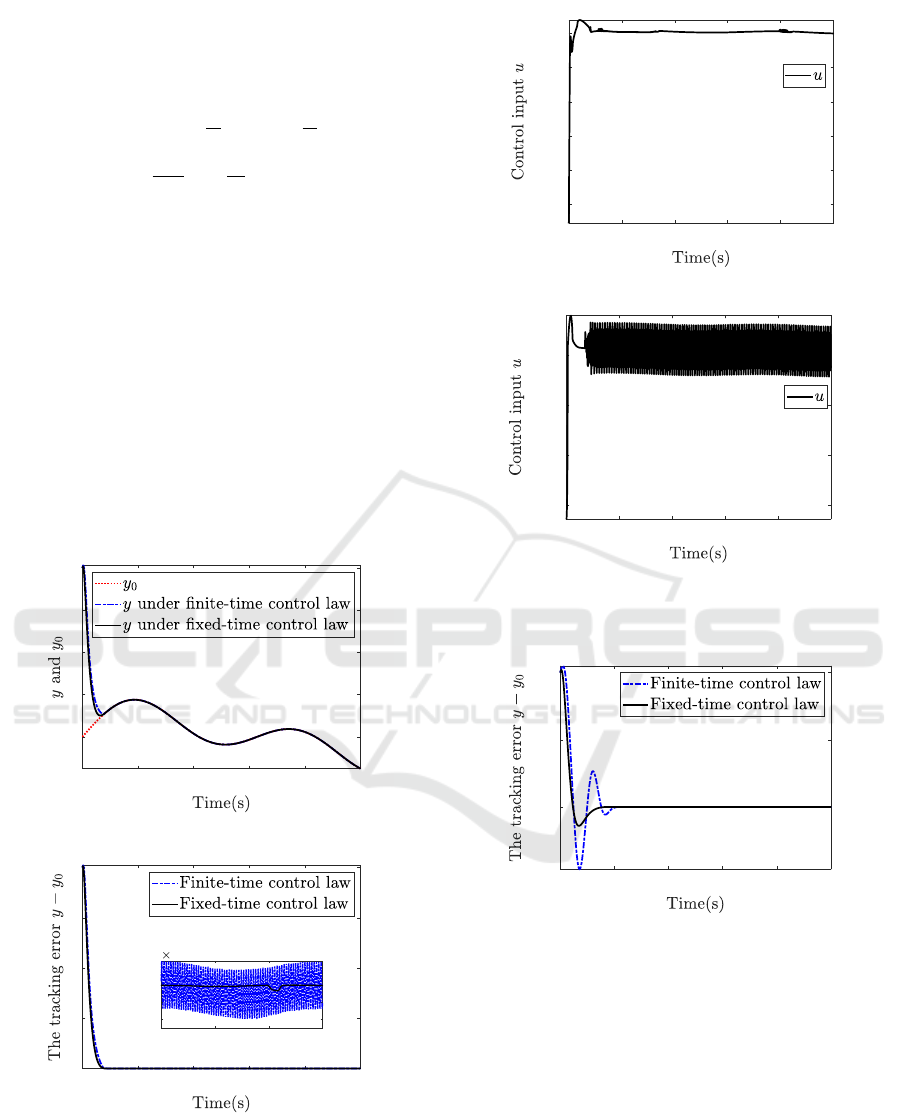
The simulation results are shown in Figures 1-3.
In Figure 1, the tracking performance under the pro-
posed fixed-time command filtered backstepping con-
trol law and finite-time command filtered backstep-
ping control law in (Yu et al., 2018) are presented.
0 2 4 6 8 10
-500
-400
-300
-200
-100
0
(a) u under the fixed-time control law in this paper
0 2 4 6 8 10
-300
-200
-100
0
(b) u under the finite-time control law in (Yu et al.,
2018)
Figure 3: Control input.
0 2 4 6 8 10
0
50
100
Figure 4: Tracking error y − y
0
for another condition.
Figure 2 depicts the tracking error. Figure 3 shows
the time response of input signal u. From Figure 1 and
2, it can be found that the proposed fixed-time com-
mand filtered backstepping control law in this work
achieves faster convergence rate and better tracking
accuracy than the finite-time command filtered back-
stepping control law in (Yu et al., 2018). From Figure
3, it is observed that less chattering is suffered under
the proposed fixed-time command filtered backstep-
ping control law.
To better show the superiority of the proposed
fixed-time control law, another initial condition
[x
1
(0) x
2
(0) x
3
(0)] = [100 75 50]
Fixed-Time Tracking Control for a Class of Nonlinear Systems via Command Filtered Backstepping
55

is chosen. The tracking errors under such condition
are depicted in Figure 4, from which we can find
that the proposed fixed-time tracking control law pos-
sesses faster time response compared with the finite-
time tracking control law in (Yu et al., 2018) when
the initial condition of the system is far away from
the target value.
5 CONCLUSION
In this paper, a novel fixed-time adaptive command
filtered backstepping control approach is proposed to
solve the tracking control problem for a class of non-
linear systems. According to this approach, a group of
novel virtual control laws and the actual control law
are constructed to achieve the fixed-time convergence
of the closed-loop system. The fixed-time differen-
tiator is introduced to approximate the time derivative
of virtual control laws in a fixed time. The new com-
pensation mechanism is developed to reduce the neg-
ative effect of the filtering error. By using the fixed-
time stability criterion, the fixed-time tracking perfor-
mance of the closed-loop system under the proposed
command filtered backstepping control law is anal-
ysed, and a rigorous theoretical proof is presented.
ACKNOWLEDGEMENTS
This work was supported in part by the National Nat-
ural Science Foundation of China under Grant No.
62203255.
REFERENCES
Basin, M., Yu, P., and Shtessel, Y. (2017). Finite-and fixed-
time differentiators utilising hosm techniques. IET
Control Theory & Applications, 11(8):1144–1152.
Chen, L. and Wang, Q. (2021). Finite-time adaptive neural
dynamic surface control for non-linear systems with
unknown dead zone. IET Control Theory & Applica-
tions, 15(1):40–50.
Cheng, F., Wang, H., Zong, G., Niu, B., and Zhao, X.
(2023). Adaptive finite-time command-filtered con-
trol for switched nonlinear systems with input quanti-
zation and output constraints. Circuits, Systems, and
Signal Processing, 42(1):147–172.
Deng, H. and Krsti
´
c, M. (1997). Stochastic nonlinear
stabilization–i: A backstepping design. Systems &
Control Letters, 32(3):143–150.
Dong, W., Farrell, J. A., Polycarpou, M. M., Djapic, V.,
and Sharma, M. (2011). Command filtered adaptive
backstepping. IEEE Transactions on Control Systems
Technology, 20(3):566–580.
Farrell, J. A., Polycarpou, M., Sharma, M., and Dong, W.
(2009). Command filtered backstepping. IEEE Trans-
actions on Automatic Control, 54(6):1391–1395.
Feng, C., Wang, Q., Hu, C., and Zhang, S. (2020). Finite-
time backstepping control with command filter for a
class of nonlinear systems with parametric uncertain-
ties. Transactions of the Institute of Measurement and
Control, 42(12):2297–2307.
Fu, C., Wang, Q., Yu, J., and Lin, C. (2020). Neu-
ral network-based finite-time command filtering con-
trol for switched nonlinear systems with backlash-like
hysteresis. IEEE Transactions on Neural Networks
and Learning Systems.
Guo, X., Ma, H., Liang, H., and Zhang, H. (2021).
Command-filter-based fixed-time bipartite contain-
ment control for a class of stochastic multiagent sys-
tems. IEEE Transactions on Systems, Man, and Cy-
bernetics: Systems.
Hardy, G. H., Littlewood, J. E., P
´
olya, G., P
´
olya, G., et al.
(1952). Inequalities. Cambridge university press.
Kanellakopoulos, I., Kokotovic, P. V., and Morse, A. S.
(1991). Systematic design of adaptive controllers for
feedback linearizable systems. In 1991 American con-
trol conference, pages 649–654. IEEE.
Li, Y. (2019). Finite time command filtered adaptive fault
tolerant control for a class of uncertain nonlinear sys-
tems. Automatica, 106:117–123.
Mazenc, F. and Bliman, P.-A. (2006). Backstepping design
for time-delay nonlinear systems. IEEE Transactions
on Automatic Control, 51(1):149–154.
Morawiec, M., Strankowski, P., Lewicki, A., Guzi
´
nski, J.,
and Wilczy
´
nski, F. (2020). Feedback control of mul-
tiphase induction machines with backstepping tech-
nique. IEEE Transactions on Industrial Electronics,
67(6):4305–4314.
Polyakov, A. (2012). Nonlinear feedback design for fixed-
time stabilization of linear control systems. IEEE
Transactions on Automatic Control, 57(8):2106–
2110.
Shen, Q. and Shi, P. (2015). Distributed command filtered
backstepping consensus tracking control of nonlinear
multiple-agent systems in strict-feedback form. Auto-
matica, 53:120–124.
Su, Y. and Zheng, C. (2019). Global fixed-time output feed-
back stabilization for a class of double integrator sys-
tems. IEEE Transactions on Circuits and Systems II:
Express Briefs, 67(10):1954–1958.
Swaroop, D., Hedrick, J. K., Yip, P. P., and Gerdes, J. C.
(2000). Dynamic surface control for a class of nonlin-
ear systems. IEEE transactions on automatic control,
45(10):1893–1899.
Tang, X., Tao, G., and Joshi, S. M. (2003). Adaptive ac-
tuator failure compensation for parametric strict feed-
back systems and an aircraft application. Automatica,
39(11):1975–1982.
Tian, B., Lu, H., Zuo, Z., and Wang, H. (2018). Fixed-
time stabilization of high-order integrator systems
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
56

with mismatched disturbances. Nonlinear Dynamics,
94(4):2889–2899.
Tian, B., Zuo, Z., Yan, X., and Wang, H. (2017). A fixed-
time output feedback control scheme for double inte-
grator systems. Automatica, 80:17–24.
Tong, S., Li, K., and Li, Y. (2020). Robust fuzzy adap-
tive finite-time control for high-order nonlinear sys-
tems with unmodeled dynamics. IEEE Transactions
on Fuzzy Systems, 29(6):1576–1589.
Wang, D. and Huang, J. (2005). Neural network-based
adaptive dynamic surface control for a class of uncer-
tain nonlinear systems in strict-feedback form. IEEE
transactions on neural networks, 16(1):195–202.
Wang, H., Kang, S., and Feng, Z. (2019). Finite-time adap-
tive fuzzy command filtered backstepping control for
a class of nonlinear systems. International Journal of
Fuzzy Systems, 21:2575–2587.
Wang, K., Liu, X., and Jing, Y. (2021). Adaptive finite-time
command filtered controller design for nonlinear sys-
tems with output constraints and input nonlinearities.
IEEE Transactions on Neural Networks and Learning
Systems, 33(11):6893–6904.
Yu, J., Shi, P., and Zhao, L. (2018). Finite-time command
filtered backstepping control for a class of nonlinear
systems. Automatica, 92:173–180.
Zhao, D., Jiang, B., and Yang, H. (2021). Backstepping-
based decentralized fault-tolerant control of hyper-
sonic vehicles in pde-ode form. IEEE Transactions
on Automatic Control, 67(3):1210–1225.
Fixed-Time Tracking Control for a Class of Nonlinear Systems via Command Filtered Backstepping
57
