
A Decision-Making Architecture for Human-Robot Collaboration:
Model Transferability
Mehdi Sobhani
1 a
, Jim Smith
2 b
, Anthony Pipe
3 c
and Angelika Peer
4 d
1
Department of Engineering Mathematics, University of Bristol, Bristol, U.K.
2
Department of Computer Science and Creative Technologies, University of the West of England, Bristol, U.K.
3
Bristol Robotics Laboratory, University of the West of England, Bristol, U.K.
4
Faculty of Engineering, Free University of Bozen-Bolzano, Bozen-Bolzano, Italy
Keywords:
Decision-Making, Joint Action, Human-Robot Interaction, Internal Simulation.
Abstract:
In this paper, we aim to demonstrate the potential for wider-ranging capabilities and ease of transferability of
our recently developed decision-making architecture for human-robot collaboration. To this end, a somewhat
related but different application-specific example from the generic one used in its development is chosen, a
toy car assembling task in which a participant works together with a robot to perform the assembly task. In a
“Wizard of Oz” fashion, a comparison is made between the participant’s reactions to working with the robot
being controlled either by our architecture or by a human “Wizard” who is hidden from view. With regard to the
generalisability of the architecture, we also wish to investigate whether specific models trained on the observed
human behaviour in a generic assembly task also transfer to this more complex task. Therefore, pre-trained
interaction models from a prior generic pick-and-place task are used again in this new application without any
re-training. The architecture was implemented on a robotic arm. Participants worked with the robotic arm to
perform the task of picking toy car parts one by one and assembling the car while collaborating with the robot.
Each participant repeated the task 3 times for each condition, Model or Wizard, in a random order. At the end
of each trial participants completed a PeRDITA questionnaire. First, a test to rule out significant differences
was performed, which yielded no significant results for any of the subjective and objective measures. As not
having a significant difference does not necessarily mean similarity of conditions, to check for similarity, a
Bayesian comparison of the conditions was performed next, which indicated a high probability of similarity
between the model and Wizard performance. The high similarity to human-like performance observed for this
more complex task supports the claim for the transferability of the models trained on a more generic task.
1 INTRODUCTION
Achieving a natural and seamless human-robot in-
teraction (HRI) has been a continuing challenge for
roboticists. To tackle this challenge, some tried de-
veloping a robot adaptive behaviour to adjust to dif-
ferent situations (Van Zoelen et al., 2020; Mitsunaga
et al., 2008; Kumar and Sahin, 2017; Nikolaidis et al.,
2017). For mobile robots, attempts have been made to
create a natural HRI by improving the robot planners
to work in an uncertain situation and produce more
socially acceptable trajectories (Ong et al., 2010; Truc
a
https://orcid.org/0000-0001-5138-134X
b
https://orcid.org/0000-0001-7908-1859
c
https://orcid.org/0000-0002-8404-294X
d
https://orcid.org/0000-0002-2896-9011
et al., 2022). Further, there are works on learning the
human affective state to adapt the robot behaviour ac-
cordingly (Churamani et al., 2022). However, there
has been little work exploring the idea of a co-active
human-robot collaboration in which the robot has the
required cognitive abilities to attempt understanding
of its partner and then adjust its behaviour accord-
ingly.
To address this challenge, a robot needs to be
equipped with human-like cognitive abilities. These
required abilities include perspective-taking (Trafton
et al., 2005), understanding affordances (Moratz and
Tenbrink, 2008), forming expectations of the next
action (Lohse, 2011), and timing ability (Yamazaki
et al., 2008; Chao and Thomaz, 2011).
For all of them, the ability to anticipate the part-
ner’s decisions, and any associated future actions, is
Sobhani, M., Smith, J., Pipe, A. and Peer, A.
A Decision-Making Architecture for Human-Robot Collaboration: Model Transferability.
DOI: 10.5220/0012210600003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 719-726
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
719

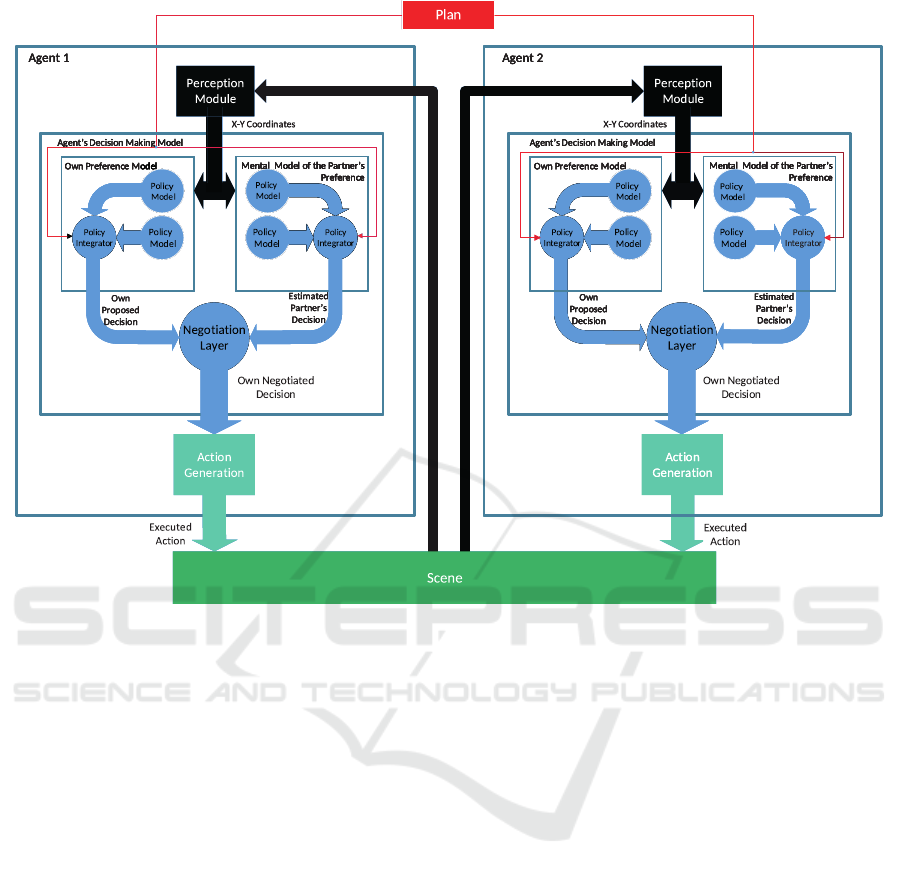
of utmost importance. To this end, in our previ-
ous work (Sobhani et al., 2023b), we developed a
decision-making architecture for human-robot collab-
oration (Figure 1). In this architecture, the robot runs
an internal simulation to determine its own decisions
and to estimate the decisions of the partner given a
specific task to be accomplished. The architecture
defines a series of policies (like those presented in
(Sobhani et al., 2023b)) that are thought to be under-
lying the agent’s decisions and integrates them into
an overall decision-making policy model. These pol-
icy models are then integrated by the policy integrator
to take one’s own decisions. In parallel, the models
are used to obtain predictions of the partner’s deci-
sions through an internal simulation. The outcome of
these simulations is then fed into the negotiation layer
where potential conflicts are resolved before reaching
a final decision at the end of the internal simulation at
each time step.
In this paper, we aim to demonstrate the transfer-
ability of these already trained models to the more
application-specific task of assembling a toy car. All
the trained models were used for the new task with-
out any retraining. Here, the order of the assembling
car parts was mapped to the colour order in the colour
policy model and the pre-trained distance policy did
not need any modification, since it is an underlying
part of any task involving some aspects of collabora-
tive pick-and-place. The policy integrator layer and
the negotiation layer also did not need any re-training
and were used as trained in the previous work.
Comparing our architecture to developments in
the state of the art, we can conclude that it differs
from most work in that it models behaviour observed
in joint action rather than focusing on developing cog-
nitive abilities for individual robotic systems.
For example, several cognitive architectures in the
literature, like ACT-R (Anderson et al., 2004), Soar
(Laird, 2012) or R-CAST, which are based on Recog-
nition Primed Decision (RPD) models (Fan et al.,
2005), are developed for individual agents. These
architectures are either based on declarative mem-
ory retrieval using instance-based models or rule-
based (ACT-R), or they are probabilistic modelling
approaches like decision trees (Soar). In our proposed
architecture the decision policies were modelled and
integrated for individuals using DNFs, and resulting
conflicts in joint action were resolved or prevented by
the implementation of the negotiation layer.
On the contrary, Bicho et al. (Bicho et al., 2011)
presented one of the few existing works that proposes
a decision-making system for joint action. They also
used DNFs, however, in their work decision policies
were hard-coded rather than taken from human ex-
perimental data. The workspace was divided into two
sides, each covered by only one of the agents allow-
ing to predict actions to be performed by a co-actor.
They assume that objects in the area closer to each ac-
tor (human or robot) will only be picked by the near-
est actor. In contrast, in our work we consider the
workspace to be shared equally, since we observed
in our human-human collaboration experiments that
people did not necessarily act based on the assump-
tion of a divided workspace and, indeed, reached into
their partner’s area for picking objects. Furthermore,
their decision-making system was only tested in joint
action scenarios that involve serial actions with col-
laborators taking turns and performing complemen-
tary actions. This reduces potential conflicts signifi-
cantly, while our proposed architecture has been de-
veloped based on both serial and parallel actions with
a negotiation layer to resolve conflicts. This means,
if there are no physical constraints or limitations im-
posed by the shared plan, the actor can perform an
independent action in parallel to his/her/its partner. A
comprehensive comparison to previous work is pre-
sented in (Sobhani et al., 2023b).
Designing an experiment with a more realistic
task, we aim to evaluate the performance of our re-
cently developed architecture for a more complex task
to show the transferability of the models trained based
on a rather generic pick-and-place task. For this, we
implemented our architecture on a robotic arm and
asked human operators to collaborate with the robot
for assembling parts of a toy car. We used a Wizard
of Oz test in which a human was making decisions
and the robot implemented those decisions during the
collaboration as a baseline and compared it to the per-
formance of our architecture when it was used by the
robot to make decisions.
In addition to objective measures, we evaluated
participants’ answers to the PeRDITA questionnaire
(Devin et al., 2018) taken at the end of each trial. Re-
sults reported in Section 4 and discussed in Section 5
indicate that our introduced architecture achieves sim-
ilar performance as the baseline without requiring re-
training of the decision policy models that have been
already trained based on a generic pick-and-place
task.
2 TRAINED ARCHITECTURE
Our novel decision-making architecture (Figure 1) en-
ables a robot to run an internal simulation to deter-
mine its own decisions and to estimate the decisions
of its partner given a specific shared task to be accom-
plished. The architecture defines a series of policies
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
720
1
2
1
2
1
1
2
2
Figure 1: The decision-making architecture for a co-active joint action in human-robot collaboration presented in our previous
work (Sobhani et al., 2023b).
that are thought to be underlying the agent’s decisions
based on the shared plan and integrates them into
an overall decision-making policy model. The out-
come of these internal simulations of own and part-
ner’s decision is then fed into the negotiation layer
where potential conflicts are resolved before reach-
ing a final decision at each time step. The negoti-
ation layer works as an implicit communication as,
after the actions of both agents are updated in real-
time, these updated actions again trigger a new out-
come of the internal simulations of both agents. Sev-
eral modelling techniques were considered to develop
the decision policy models, the policy integrator layer,
and the negotiation layer (Sobhani et al., 2023b), and
Dynamic Neural Field (DNF) was the final choice
(Amari, 1977; Sch
¨
oner, 2008). In developing the ar-
chitecture, a generic pick-and-place task based on a
shared plan with a colour order of objects was used.
This required models of Colour and Distance policy
along with the policy integrator and the negotiation
layer to be trained based on human-human interaction
data. The structure of the used models is explained
next.
2.1 Structure of Distance Policy
For modelling Distance policy, the table-top setup of
the experiment is mapped into a 2D DNF. The DNF
equations and its parametrers are presented in (Sob-
hani et al., 2023b).
The projected position of the centre point of each
car part and the wrist position of the participants’
wrists is mapped on the x-y plane. The x and y axes
are then used as features so that each x-y coordinate
of the objects and wrist is considered the position of
an input stimulus to the neural field. Each stimulus
is modelled with a 2D Gaussian and the interaction
of these stimuli changes the field activation level in
different locations as the input stimuli change due to
the agents’ motions. The parameters to be learned for
this setting are mainly interaction kernel parameters.
Having properly trained the model, interaction kernel
parameters can change the neural field behaviour such
that the response to stimuli will result in an activation
of the field at the point of interest, respectively the
location of the most likely chosen part.
A Decision-Making Architecture for Human-Robot Collaboration: Model Transferability
721

2.2 Structure of Colour Policy
The Colour policy model, is a 1D DNF coupled with a
memory trace as presented in (Sobhani et al., 2023b).
The training for this structure is like memorising
the colour order by demonstrating the order and show-
ing coloured objects one by one. The memory then
forms pre-shapes for the colour order. This model
structure is similar to the work by Sandamirskaya and
Sch
¨
oner (Sandamirskaya and Sch
¨
oner, 2010), but im-
plemented in a way that the neural field stays activated
to wait in the order until all objects of the same colour
are removed by the participant(s) before moving to
the next colour in the order. This is done to simulate
tasks with an equal priority of actions in the plan. The
parameters of the Colour Policy DNF are chosen to be
the same as the ones reported in (Sandamirskaya and
Sch
¨
oner, 2010).
2.3 Structure of Policy Integrator
Having different policies modelled separately, and in-
tegrated through the policy integrator layer, makes the
architecture adaptable to different tasks. For the task
at hand, to have a correct prediction on the chosen
part, the colour policy model is coupled with the dis-
tance policy model. This provides a measure to decide
when there exist multiple objects of the same colour.
This means that the colour policy creates a short list of
the objects to be picked and the distance policy model
predicts which one will be picked up. This is done by
having a DNF similar to the Distance policy with only
shortlisted objects as stimuli being implemented and
the final object is chosen from the shortlist according
to the distance policy. This process occurs naturally
in the DNF of the policy integrator as the amplitude of
the input stimuli from the output of the colour policy
and distance policy models will intensify the neural
field activation for the chosen object.
2.4 Structure of Negotiation Layer
A simulation of the predicted partners’ actions runs
simultaneously with the ’own’ model in the negotia-
tion layer. The aim of this simulation is to adjust the
robot’s own decision to the predicted partner’s deci-
sion so as to prevent any conflicts like picking up the
same object. This will also adjust the decision based
on the plan, so, if the model predicts that the partner
would perform the next step, such as when a partner is
reaching quicker to an object, the agent should either
move on to the next action or wait for the appropriate
moment to perform the next action. This is done by
inhibiting its own decisions when the model predicts
that the partner will perform the same action, or by
exciting the decision when it predicts that the partner
is waiting or performing another action. To achieve
this, the negotiation layer is implemented using a 2D
DNF similar to the Distance policy and the interaction
kernel of two DNFs of the own agent model and the
partner model, is adjusted based on the human-human
interaction experiment. This means the desired out-
come is achieved by learning when each DNF should
be inhibited (activation function being locally or glob-
ally deactivated) or excited (activation function either
locally or globally being further activated). It is note-
worthy that unlike works such as the one by Devin
and Alami (Devin and Alami, 2016) that utilises a di-
alogue system, here the negotiation layer works as an
implicit communication, as after the actions of both
agents are updated in real-time, these updated actions
again trigger a new outcome of the internal simula-
tions of both agents.
3 METHOD
An experiment was designed in which the decision-
making models developed based on a generic task
were to be tested for their adaptability to another more
application domain-specific and complex task like as-
sembling parts of a toy car. All the developed models
could be used in this experiment without requiring re-
training. The order of the assembling part was only
mapped to the colour order in the colour policy. The
experiment was designed similarly to the previous ex-
periments to have two conditions namely, the “Wizard
of Oz” and the “Model” for when the robot used the
proposed decision-making architecture. Each partici-
pant repeated the task 3 times for each condition with-
out being informed of the conditions. The order of the
trials was randomised. Tests were first carried out to
rule out significant differences. In case of no signif-
icance, these tests would be followed by a Bayesian
comparison of the conditions to indicate the proba-
bility of similarity of the model and Wizard perfor-
mance.
3.1 Experimental Setup
The experimental setup was similar to our previ-
ous human-robot interaction study (Sobhani et al.,
2023a). Participants were asked to work with a
Franka Emika Panda robotic arm in a toy car as-
sembling task. Their dominant hand was marked for
tracking by Vicon motion capture reflective balls. The
robot control was done in real-time using the libfranka
library in C++. The decision-making model was run-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
722

Figure 2: Experiment Setup.
ning in parallel in MATLAB and the decision was
communicated to the robot controller through TCP/IP
socket communication. This means that the robot
controller was not continuously receiving human de-
cision information but at specific times, hence, the
robot could not change its behaviour when one mo-
tion was being implemented. Participants repeated
the same task in two conditions. The Experiment
setup is shown in Figure 2. In the human decision-
maker condition, the wizard is hidden behind a par-
tition wall and sees the scene from the MS Kinect
camera mounted over the table to also track the parts
marked by AR markers.
3.2 Wizard Protocol
To ensure consistent behaviour of the human
decision-maker, the following protocol was given to
the wizard to follow: The wizard makes the first de-
cision as soon as the robot is in the “ready position”.
This is done by entering a number between 1 to 7,
1 for the car chassis, 2, for the car cabin, 3 to 6 for
the wheel depending on the location of the wheels on
the table and 7 for the spoiler, from the robot per-
spective, or entering 8 for just waiting. Later the
wizard needs to confirm this decision when the robot
goes to the “ready-to-grasp” position. As soon as the
robot reaches the “ready-to-grasp” position, the wiz-
ard must make the final decision within one second or
as soon as the human participant makes his/her move
(whichever is faster). At this stage, the wizard has 3
options, either to confirm the decision and continue
picking the same part, change to another part, or just
wait. If the decision is waiting, the wizard needs to
make another decision again within one second until
a part is chosen. This will continue until the task is
complete.
3.3 Task
The task was to assemble parts of a toy car including
the Chassis, Cabin, Wheels and Spoiler. The order of
the assembly was given to the participants to follow as
1. Chassis, 2. Cabin, 3. Wheels, and 4. Spoiler. While
participants were following this order, they were free
to choose the wheels in any order when it was the
right time to do so. This assembly task is exemplary
for a variety of tasks a robot might be used for.
3.4 Participants
In total, 16 new participants (13 male) took part in
the experiment. Participants were students and staff
members of the university with a mean age of 29.8
(STD= 6.14) ranging between 22 and 43 years old
with an average height of 175.6 cm (STD=7.43) rang-
ing between 164 and 188 cm. Hereby, 14 partici-
pants were right-handed, one was ambidextrous but
used his left hand and one was left-handed, and all
reported normal or corrected-to-normal eyesight (8
wearing glasses). Participants took part in the experi-
ment voluntarily and all gave informed consent. Eth-
ical approval for this experiment was obtained from
the ethics committee of the University of the West of
England (reference number: UREC16-17.03.10).
3.5 Subjective and Objective Measures
In terms of objective measures, the task completion
time, the robot task share, and the number of conflicts
were recorded. The robot task share is calculated as
the number of parts the robot picks divided by the to-
tal number of parts required (7) for assembling the
car. A conflict is considered to have occurred when
the robot tries to pick the part that the participant has
just picked or is picking up.
As there is no verbal communication between the
robot and participants, only four dimensions of the
PeRDITA questionnaire were used: “Collaboration”,
“Interaction”, “Robot Perception”, and “Acting”.
4 RESULTS
First, results of the PeRDITA questionnaire (subjec-
tive measures) are presented. The results obtained for
the human decision-maker are compared to the model
in Figure 3. The mean is calculated by averaging over
3 trials of each condition for each participant of the
A Decision-Making Architecture for Human-Robot Collaboration: Model Transferability
723
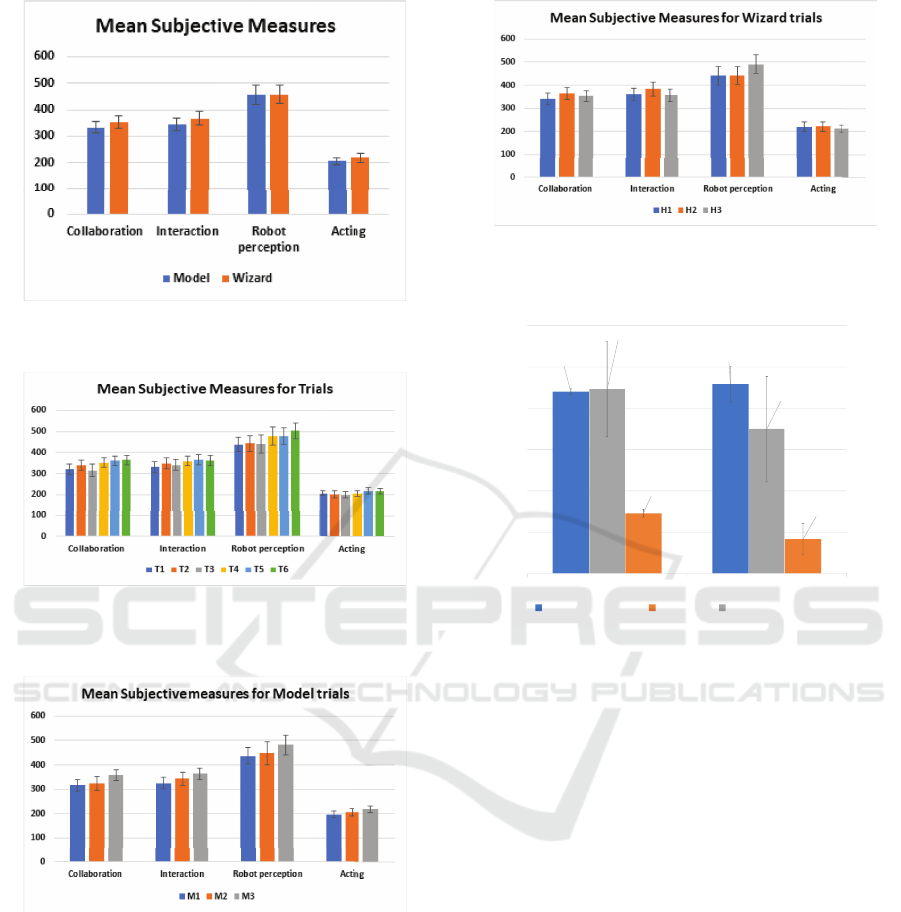
Figure 3: Bar graph for mean value of subjective measures
from the PeRDITA questionnaire. Error bars are ±1SEM.
Figure 4: Bar graph for mean value of subjective measures
from the PeRDITA questionnaire based on order of the tri-
als. Error bars are ±1SEM.
Figure 5: Bar graph of mean subjective measures for 3 trials
with model decision-maker. Error bars are ±1SEM.
16 participants. Despite a slightly higher score for the
human decision-maker across the board, no signifi-
cant difference was found in the subjective measures.
The results are also presented based on the order of
the trials in Figure 4. Similarly, the data was sorted
based on the order of the trials M1, M2, M3 in each
condition, see Figures 5 and 6. An overall improve-
ment in scores can be observed, however, no signifi-
cant difference was found.
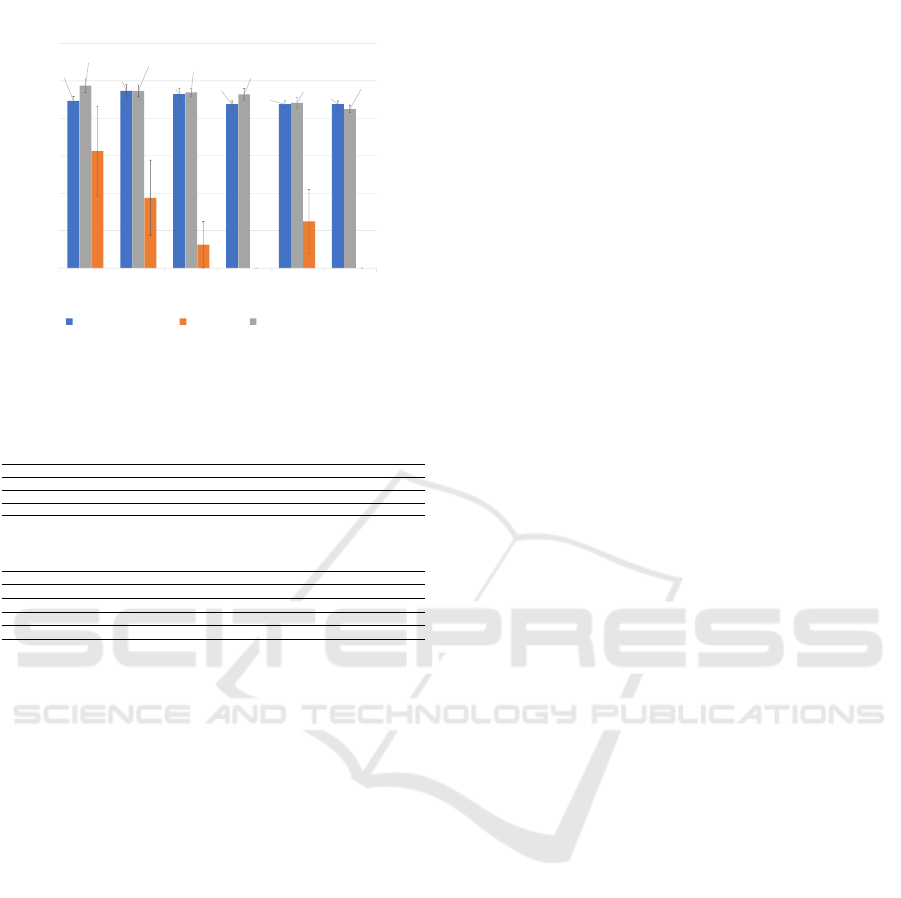
The results for three objective measures namely,
Task Completion Time, Robot Task Share, and Con-
Figure 6: Bar graph for mean subjective measures for 3 tri-
als with human decision-maker. Error bars are ±1SEM.
0.44047619
0.458333333
0.145833333
0.083333333
54.20833333
53.08333333
49
50
51
52
53
54
55
56
0
0.1
0.2
0.3
0.4
0.5
0.6
Model Wizard
Task Completion time
\seconds
Mean Robot Task Share and number of conflicts
Mean Objective Measures
Robot Task Share Conflicts Task Completion Time
Figure 7: Mean value of the objective measures depicted in
bar graphs for Robot Task Share, Conflicts and Task Com-
pletion Time. Error bars are ±1SEM (standard error of
mean).
flicts are presented in Figures 7. No significant differ-
ence was found when comparing the model against
the human decision-maker for any of the measures.
Looking at the order of trials, the data shows a
significant difference (F = 2.57, p < 0.0323) for task
completion time between the first and sixth trials (re-
gardless of condition), see Figure 8. When data is
sorted based on the order of trials within each condi-
tion no significant difference was found for the con-
dition using the model, but for the human decision-
maker, a significant difference (F = 4.04, p < 0.0243)
between the first and third trial in the task completion
time was observed.
Since most of the tests didn’t show any signifi-
cant differences and since a test for difference does
not allow making any statement about similarity, a
Bayesian comparison (Benavoli et al., 2017) of the
data for the two conditions; the “Wizard of Oz” and
the “Model”, was performed. The data was nor-
malised for this analysis based on the maximum val-
ues of each measure. The comparison results are de-
picted in Tables 1 and 2. They show a high likelihood
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
724
0.446428571
0.473214286
0.464285714
0.4375
0.4375
0.4375
0.3125
0.1875
0.0625
0
0.125
0
56.8125
55.1875
54.75
54.125
51.4375
49.5625
0
10
20
30
40
50
60
70
0
0.1
0.2
0.3
0.4
0.5
0.6
T1 T2 T3 T4 T5 T6
Task Completion time
\seconds
Mean Robot Task Share and number of conflicts
Trial Number
Mean Objective Measures
Robot Task Share Conflicts Task Completion Time
Figure 8: Mean value of the objective measures depicted in
bar graphs for Robot Task Share, Conflicts and Task Com-
pletion Time. Error bars are ±1SEM (standard error of
mean).
Table 1: Bayesian Comparison for the objective measures.
Measure Model is better Difference is negligible Human is better Rope
Robot Task Share 0.000364 0.9996192 1.680241e-05 0.1
Task Completion Time 1.555164e-05 0.99992125 7.719776e-05 0.1
Conflicts 0.0002701 0.99970587 2.4007e-05 0.5
Table 2: Bayesian Comparison for the subjective measures.
Measure Model is better Difference is negligible Human is better Rope
Collaboration 9.5738e-05 0.975926 0.02397785 0.1
Interaction 8.44871e-05 0.958927 0.040988432 0.1
Robot Perception 0.00182163 0.9954326 0.002745791 0.1
Acting 0.00205497 0.922336 0.0756091 0.1
of similarity between the two conditions for all sub-
jective and objective measures.
5 DISCUSSION
The presented car assembling HRC experiment was
designed to demonstrate the transferability and ex-
pandability of the proposed architecture for human-
robot collaboration presented in our previous work.
To do so, no model was retrained and the order of
the assembling task was mapped to the already learnt
colour order in the colour policy. The distance policy
was used as it was previously trained.
Results indicate that when data was averaged
and sorted per conditions, the human decision-maker
scored descriptively slightly better than the model in
all the objective and subjective measures, but no sig-
nificant differences were found. Having ruled out
eventual significant differences and since tests for dif-
ferences don’t allow any statement on similarities,
a further Bayesian comparison of the data was per-
formed, which revealed a high probability of similar-
ity between the two conditions. This high similarity
of the model to human-like performance found for the
case of the studied more complex task, supports the
claim of the transferability of the models trained on
a more generic task, which was the main aim of the
performed study.
Sorting the data in the order of the appearance of
trials, a significant difference was found in the task
completion time between the first and the last trial.
The significant difference was also observed when
only looking at the human decision-maker trials, how-
ever, not for the model trials, although the time de-
scriptively improved over trials. The reason for this
decrease in the task completion time from the first
trial to the last could be due to learning effects as
the same task was repeated 6 times during this ex-
periment. This learning effect was prevented in the
previous HRC experiments (Sobhani et al., 2023a) as
the task was changing randomly for trials and in each
trial, participants were making a different alphanu-
meric character. Having a significant change in the
Task Completion Time for the Wizard condition and
lack of this significant difference in the model condi-
tion could also indicate that participants could adapt
better to the robot in the wizard condition. How-
ever, further investigation with more participants is
required for a concrete conclusion here.
Finally, comparing the tasks the models were
trained on with this task, fewer conflicts were
recorded. This could be because of having fewer par-
allel actions compared to previous experiments. In
the task used for data collection and training of mod-
els, there were 3 pairs of wooden blocks of the same
colours giving them the same priority to be picked in
parallel, while in the car assembling task, only wheels
had the same priority. Nonetheless, having several
ways of assembling wheels in this task and the suc-
cess of the architecture in dealing with this uncer-
tainty without any specific prior training could be a
good indication of the models’ transferability.
Overall, we can conclude that our results indi-
cate a good potential for transferability of the models
trained on a generic task to different more application-
specific tasks if they shared some characteristics, such
as serial orders. In this context, it is important to
note, that the Colour policy was trained for an order
of four colours and the car assembling task had also
four main steps. However, this does not resemble a
limitation of the model as it is also possible to map
unequal sizes of orders to the ”Colour policy”. If re-
quired to add new steps to the order, for example more
objects, they can be presented to the model to create
a new stimulus, which can be added to the order.
A Decision-Making Architecture for Human-Robot Collaboration: Model Transferability
725

REFERENCES
Amari, S.-i. (1977). Dynamics of pattern formation in
lateral-inhibition type neural fields. Biological cyber-
netics, 27(2):77–87.
Anderson, J. R., Bothell, D., Byrne, M. D., Douglass, S.,
Lebiere, C., and Qin, Y. (2004). An integrated theory
of the mind. Psychological review, 111(4):1036.
Benavoli, A., Corani, G., Dem
ˇ
sar, J., and Zaffalon, M.
(2017). Time for a change: a tutorial for comparing
multiple classifiers through bayesian analysis. Journal
of Machine Learning Research, 18(77):1–36.
Bicho, E., Erlhagen, W., Louro, L., and e Silva, E. C.
(2011). Neuro-cognitive mechanisms of decision
making in joint action: A human–robot interaction
study. Human movement science, 30(5):846–868.
Chao, C. and Thomaz, A. L. (2011). Timing in multimodal
turn-taking interactions: Control and analysis using
timed petri nets. Journal of Human-Robot Interaction,
1(1):1–16.
Churamani, N., Barros, P., Gunes, H., and Wermter, S.
(2022). Affect-driven learning of robot behaviour for
collaborative human-robot interactions. Frontiers in
Robotics and AI, page 20.
Devin, S. and Alami, R. (2016). An implemented theory of
mind to improve human-robot shared plans execution.
In 2016 11th ACM/IEEE International Conference on
Human-Robot Interaction (HRI), pages 319–326.
Devin, S., Vrignaud, C., Belhassein, K., Clodic, A., Car-
reras, O., and Alami, R. (2018). Evaluating the perti-
nence of robot decisions in a human-robot joint action
context: The perdita questionnaire. In 2018 27th IEEE
International Symposium on Robot and Human Inter-
active Communication (RO-MAN), pages 144–151.
Fan, X., Sun, S., and Yen, J. (2005). On shared situa-
tion awareness for supporting human decision-making
teams. In AAAI Spring Symposium: AI Technologies
for Homeland Security, pages 17–24.
Kumar, S. and Sahin, F. (2017). A framework for an
adaptive human-robot collaboration approach through
perception-based real-time adjustments of robot be-
havior in industry. In 2017 12th System of Systems
Engineering Conference (SoSE), pages 1–6.
Laird, J. E. (2012). The Soar cognitive architecture. MIT
press, Cambridge, Massachusetts.
Lohse, M. (2011). The role of expectations and situations
in human-robot interaction. New Frontiers in Human-
Robot Interaction, pages 35–56.
Mitsunaga, N., Smith, C., Kanda, T., Ishiguro, H., and
Hagita, N. (2008). Adapting robot behavior for
human–robot interaction. IEEE Transactions on
Robotics, 24(4):911–916.
Moratz, R. and Tenbrink, T. (2008). Affordance-based
human-robot interaction. In Towards Affordance-
Based Robot Control, pages 63–76. Springer.
Nikolaidis, S., Hsu, D., and Srinivasa, S. (2017). Human-
robot mutual adaptation in collaborative tasks: Mod-
els and experiments. The International Journal of
Robotics Research, 36(5-7):618–634.
Ong, S. C., Png, S. W., Hsu, D., and Lee, W. S. (2010).
Planning under uncertainty for robotic tasks with
mixed observability. The International Journal of
Robotics Research, 29(8):1053–1068.
Sandamirskaya, Y. and Sch
¨
oner, G. (2010). An embodied
account of serial order: How instabilities drive se-
quence generation. Neural Networks, 23(10):1164–
1179.
Sch
¨
oner, G. (2008). Dynamical systems approaches to cog-
nition. In Sun, R., editor, The Cambridge Handbook
of Computational Psychology, pages 101–126. Cam-
bridge University Press.
Sobhani, M., Giuliani, M., Smith, J., Pipe, A., and Peer, A.
(2023a). Evaluating a decision-making architecture in
human-robot collaboration experiments. International
Journal of Social Robotics. (under revision).
Sobhani, M., Smith, J., Pipe, A., and Peer, A. (2023b).
A novel mirror neuron inspired decision-making ar-
chitecture for human-robot interaction. International
Journal of Social Robotics.
Trafton, J. G., Cassimatis, N. L., Bugajska, M. D.,
Brock, D. P., Mintz, F. E., and Schultz, A. C.
(2005). Enabling effective human-robot interaction
using perspective-taking in robots. IEEE Transactions
on Systems, Man, and Cybernetics-Part A: Systems
and Humans, 35(4):460–470.
Truc, J., Singamaneni, P.-T., Sidobre, D., Ivaldi, S., and
Alami, R. (2022). Khaos: a kinematic human aware
optimization-based system for reactive planning of
flying-coworker. In 2022 International Conference on
Robotics and Automation (ICRA), pages 4764–4770.
Van Zoelen, E. M., Barakova, E. I., and Rauterberg, M.
(2020). Adaptive leader-follower behavior in human-
robot collaboration. In 2020 29th IEEE International
Conference on Robot and Human Interactive Commu-
nication (RO-MAN), pages 1259–1265. IEEE.
Yamazaki, A., Yamazaki, K., Kuno, Y., Burdelski, M.,
Kawashima, M., and Kuzuoka, H. (2008). Precision
timing in human-robot interaction: coordination of
head movement and utterance. In Proceedings of the
SIGCHI Conference on Human Factors in Computing
Systems, pages 131–140. ACM.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
726
