
FOOTBALLTrace: An AI-Based System for Football Player Tracking
with Occlusion Detection and Trajectory Correction
Abdelrahman H. Mostafa
1a
, Muhammad A. Rushdi
1,2 b
, Tamer A. Basha
1c
and Khaled Sayed
3d
1
Department of Systems & Biomedical Engineering, Faculty of Engineering, Cairo University, Giza, Egypt
2
Department of Computer Science, New Giza University, Giza, Egypt
3
Department of Electrical & Computer Engineering and Computer Science, University of New Haven, West Haven, CT, U.S.A.
Keywords: Multiple Object Tracking, YOLO, Soccer Player Tracking, Football Analytics.
Abstract: Data analytics have had a significant impact on tactical and workload planning in football. Football data is
divided into two categories: event data, which captures on-the-ball events like passes and shots, and tracking
data, which captures off-the-ball movements. However, traditional methods of collecting tracking data are
expensive and inconvenient. Recently, AI solutions have emerged as low-cost and user-friendly alternatives
to track players' movements from video streams. This paper introduces FOOTBALLTrace, an end-to-end AI
system for tracking multiple football players from a panoramic game view. The system also incorporates a
novel algorithm that detects potential occlusion events and ensures trajectory continuity for occluded players.
The workflow involves five stages: panoramic view creation, player detection, player ID association,
occlusion detection, and trajectory correction. The system utilizes YOLOv7 for multiple object detection and
employs a pre-trained deep affinity network to assign unique IDs to players throughout the game. Occlusion
detection and trajectory correction are achieved by extracting geometric features from discontinuous player
trajectories. The system's performance was evaluated on full-length video data of a football game, with
occlusion events manually extracted for training and testing the occlusion detection and trajectory correction
algorithm. The system achieved an 87.5% trajectory correction rate for occluded trajectories.
1 INTRODUCTION
Football industry has been one of the most emerging
industries in the world, with significant impact on
economies of both developed and developing
countries (Zhang, 2018; Dejonghe, 2007). For
example, the English Football Premier league has
made revenues of around 5.7 Billion GBP in season
2022/2023 (Premier League Clubs Revenue By
Stream, 2023) . This emerging importance of the
football industry has grabbed the attention of the
scientific community to utilize data in performance
management, training-workload management, and
optimizing the tactical training of professional
players (Arnason, et al., 2004).
Data-driven football analytics require tools to
collect data from football games efficiently, to be
a
https://orcid.org/0009-0007-1338-3556
b
https://orcid.org/0000-0001-9869-0270
c
https://orcid.org/0000-0003-4431-8646
d
https://orcid.org/0000-0002-1252-3170
used in tactical analysis and training-load planning
(Pifer, 2019). Football data is classified according to
the player’s ball possession into event data and
tracking data (Rein, 2016). Event data describes “on-
the-ball” events such as passes, shots, duels, and
goals. Event data is collected by manual operators
with the aid of a special tagger software such as
TAGG-MAKER (Tagg Maker, 2023) and ONCE
(Once- Video Analysis, 2023).
On the other hand, tracking data includes all other
“off-the-ball” events and players’ positional data,
encompassing all the necessary information for
analysts and coaches to design training loads and
tactical plans (Forcher, 2018; De Silva, 2018).
Conventional tracking data acquisition is done by
using wearable technologies such as GPS vests or
wrist-bands with GPS modules (Tierney, 2019).
194
Mostafa, A., Rushdi, M., Basha, T. and Sayed, K.
FOOTBALLTrace: An AI-Based System for Football Player Tracking with Occlusion Detection and Trajectory Correction.
DOI: 10.5220/0012226800003587
In Proceedings of the 11th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2023), pages 194-201
ISBN: 978-989-758-673-6; ISSN: 2184-3201
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
However, those conventional tracking approaches are
facing some challenges related to their cost, players’
safety, and players’ acceptance to wear them during
the game (Edgecomb, 2006). These challenges have
demanded the development of cost-effective,
contactless alternatives to acquire tracking data
during football games.
Filming football games with high-resolution
cameras paved the way towards computer-vision-
based approaches to track players without the need
for extra wearables (Thomas, 2017). Vision-based
tracking data acquisition from the football game feed
has shown promising results. However, certain in-
game scenarios are currently hindering the practical
use of this approach. Occlusion is one of the in-game-
scenarios that occurs frequently during a game
whenever players are in a duel or they move across
each other (Sabirin, 2015). Detecting occlusion
events and correcting the trajectories of occluded
players will improve the performance of vision-based
tracking system and output more usable tracking data.
Many multiple object tracking (MOT) paradigms
have been introduced over the last two decades such
as the tracking by detection paradigm (Andriluka,
2008) which starts with object (e.g., player) detection
in a specific video frame, and constructs a feature
vector for each detection that describes each detected
object. Object detection is the input stage for any
MOT pipeline, where the choice of the detector that
has the best accuracy and highest speed is the key for
efficient detections (Luo, 2021). Recently, deep
neural networks architectures have shown significant
performance in learning features and detecting
objects, and are now the base of any state of the art
object detector (Zhao, 2019). Detection is repeated
for all objects in each frame, then frame-to-frame
features are compared using similarity computation
algorithms and objects with highly similar features
are joined by a unique ID between frames. The
process of associating objects sharing the same ID
over multiple frames leads to the construction of an
object’s trajectory (Sun, 2019).
Effective tracking algorithms rely on accurate
modeling of detected objects in each frame. There are
two main approaches for modeling: appearance
modeling and motion modeling (Luo, 2021).
Appearance modeling is an object-descriptive
approach that efficiently models objects in local
regions. However, when similar objects appear in
local regions, appearance modeling does not achieve
the best performance. On the other hand, motion
modeling adopts probabilistic approaches to model
the dynamic behavior of the player (object) and
predicts player’s future locations according to a
statistical model. Both appearance and motion
modeling approaches lack the ability to detect and/or
correct the trajectories of occluded objects (Luo,
2021).
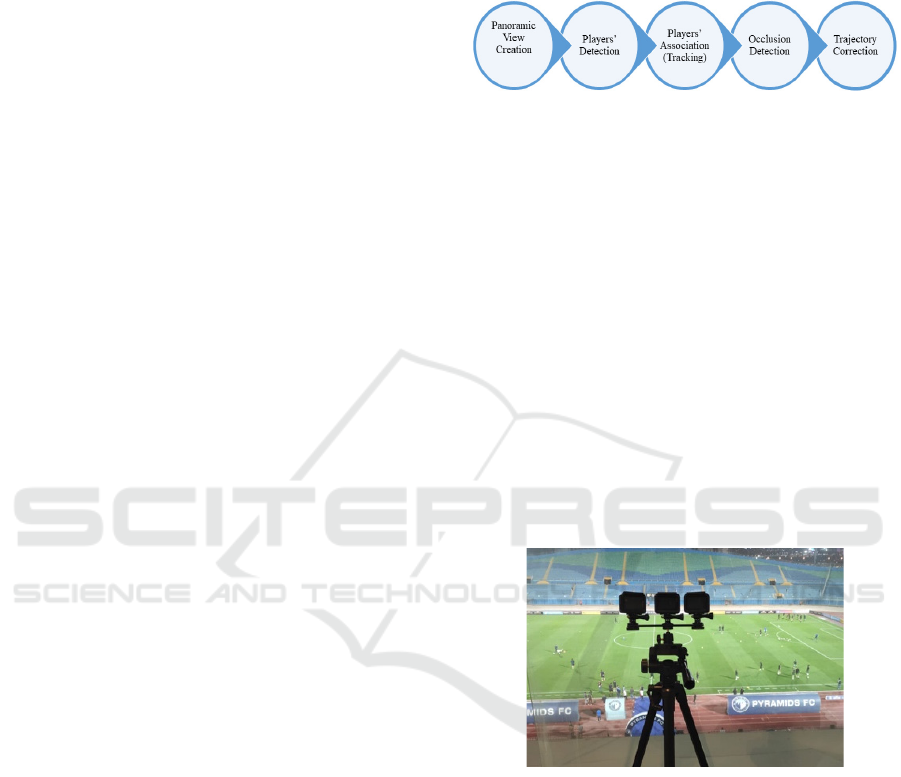
Figure 1: FOOTBALLTrace Workflow.
In this paper, we adopt the appearance modeling
approach to propose an end-to-end AI-based system
(Figure 1) called FOOTBALLTrace for acquiring
low-cost, contactless tracking data for football
analytics. Our system films the game with three fixed
cameras with 25 frames per second, stitching the three
camera views to create a panoramic view of the game,
utilizes a state-of-the-art real-time object detector,
YOLOv7, and a deep affinity estimation network to
assign unique IDs for detected players throughout the
entire game. Additionally, we introduce a novel
algorithm for occlusion detection and trajectory
correction to enhance the practicality of our system.
2 DATASET DESCRIPTION
Figure 2: Camera setup for panoramic view creation.
We used video data of a football game recorded with
three 4K resolution Go-Pro cameras with wide view
and 30% overlap between each camera view as seen
in Figure 2. The 3 views are then stitched together
using an image registration algorithm (Szeliski, 2007)
to create a panoramic view of the pitch (depicted in
Figure 3). The game video recording and panoramic
view creation are carried out by KoraStats, Egypt
(KORASTATS, 2023). The game is filmed at the Air
Defense Stadium in Cairo, Egypt. The tracking
coordinates are mapped to a pitch top view using
Homography transformation between the pitch
coordinates in the camera view and the corresponding
coordinates in the pitch top view.
FOOTBALLTrace: An AI-Based System for Football Player Tracking with Occlusion Detection and Trajectory Correction
195

Figure 3: Panoramic View of the Pitch after Stitching.
Additionally, we created a dataset of 40 occlusion
cases comprising 80 discontinued trajectories. We
created this dataset by visually examining the
tracking output on the panoramic view video. An
occlusion case is defined by start and end timestamps,
during which the trajectories of both the occluding
and occluded players are plotted in 2D, and visually
inspected as depicted in Figure 4. In the occlusion
case shown in Figure 4, the trajectories of the
occluded and occluding players exhibit sharp turns.
Other occlusion scenarios may result in the occluded
player’s ID disappearing and a new ID appearing for
the same player after the occlusion ends.
Figure 4: (Left): Occluded Player with ID = 292. (Right):
Player 292 Trajectory with a sharp turn at the blue point
which show the time of occlusion.
To create a structured data frame for our trajectory
correction algorithm, we split each occlusion case
into two records: one for the occluded player and one
for the occluding player as illustrated in Table 1.
Table 1 includes the start and end timestamps of the
occlusion case, the ID of the occluded/occluding
player (before occlusion), and the coordinates (X and
Y) of the bounding box that indicates a detected
object (i.e., player). The range of upper and lower
bounds in both X and Y directions are set to be 15%
of the width of pitches’ tactical zones (Kim, 2019).
Table 1: Sample occlusion data record.
Timestamp
Player
ID
X-axis Y-axis
Start End
Lower
Boun
d
Upper
Boun
d
Lower
Boun
d
Upper
Boun
d
00:02 00:07 17 264 269 201 206
3 METHODS
Our proposed player tracking system,
FOOTBALLTrace, consists of five main stages:
panoramic view creation, player detection, player ID
association, occlusion detection, and trajectory
correction. The panoramic view creation step is
performed at KoraStats (KORASTATS, 2023) where
real-time stitching between the three camera views is
executed during game filming. We then apply the
object detection algorithm, YOLOv7, to generate a
bound box surrounding each detected player in every
frame. The player ID association is performed using
a Deep Affinity Network (DAN) (Sun, 2019) that
accepts two frames as an input to associate objects
appearing in both frames.
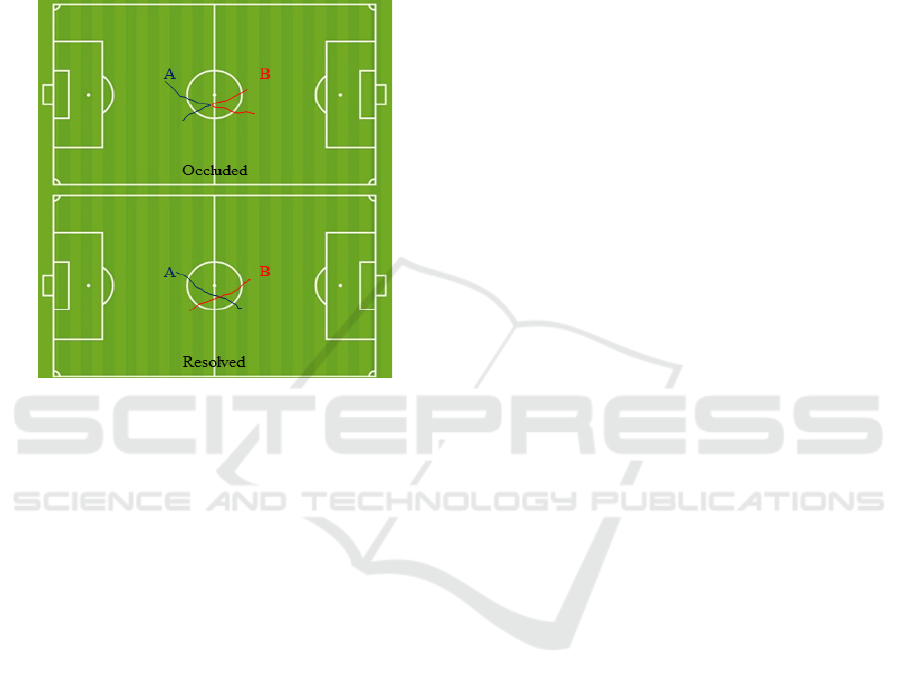
However, due to frequent interaction among
players during the game, occlusion events can occur,
leading to inaccurate player ID associations and
disrupted trajectories. For instance, when players A
and B are in close proximity and occlude each other,
their IDs may get swapped (e.g., Player “A” gets
assigned the ID “B” and player “B” gets assigned the
ID “A”). Our novel algorithm detects occlusion
events and utilizes geometrical trajectory analysis to
identify sharp trajectory turns, indicating the
occurrence of occlusion. Finally, it performs
trajectory correction by re-connecting the corrected
tracks
3.1 Player Detection
In this study, we utilized one of the state-of-the art
real-time detectors, YOLOv7 (You Only Look Once)
(Wang, 2023). YOLOv7 surpasses all known object
detectors in terms of both speed and accuracy when
applied to videos with a frame rate from 5 to 160 FPS.
Additionally, it exhibits the highest accuracy of
56.8% Average Precision (AP) among all known real-
time object detectors (Wang, 2023). YOLOv7 was
trained by Wang et. al (Wang, 2023) on the widely
recognized Microsoft Common Objects in Context
(MS COCO) dataset (Lin, 2014). The learned weights
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
196

on the MS COCO were used in this study to detect
players in game videos with a frame rate of 25 FPS.
The output of YOLOv7 consists of bounding boxes
for each detected player in each frame, which are
employed by the association network to construct
continuous trajectories.
Figure 5: Sample of Players’ Detection.
3.2 Player ID Association
To construct a player trajectory throughout the entire
game, we utilized a Deep-Affinity-Network (DAN)
(Sun, 2019) to associate the player’s ID across
consecutive frames. DAN takes two consecutive
frames as input and performs object modeling to
associate similar objects based to their affinity
estimation score; this score is computed using dot
product of the estimated feature vectors for detecting
bounding boxes as described in (Sun, 2019) . The
DAN architecture is divided into two deep network
components: the feature extractor network and the
affinity estimator network.
3.2.1 Feature Extractor Network
The feature extractor network is based on the Visual
Geometry Group (VGG) architecture (Simonyan,
2014). It models the appearances of objects (players)
by utilizing geometric-based convolutions. VGG
extracts appearance features of players at multiple
levels of abstraction (i.e., multiple scales). The
feature extractor produces a 520-dimensional feature
vector for each detected object in each frame. These
feature vectors are then concatenated with feature
vectors from other frames to form a frame-to-frame
feature matrix for player ID association (Sun, 2019).
3.2.2 Affinity Estimator Network
The feature matrices from the two input frames are
then fed into the affinity estimator network, which
performs exhaustive pairing permutations of features
to estimate the similarities and relationships between
players across different frames. The DAN
incorporates a specialized loss function for affinity
prediction, which ensures a consistent low error in
data association (Sun, 2019). The association
algorithm is robust to short-term occlusions and
capable of accurately tracking players entering and
exiting the scene.
3.3 Occlusion Detection
In occlusion events, the object detector may fail to
distinguish between the two occluded players,
resulting in association failure and potentially
associating the occluded player ID with the occluding
player ID.
False ID associations can be classified into two
types; 1) Swapping of IDs between the occlud(ing)
and occlud(ed) players, or 2) Assigning new ID for
the occluded player as if it were a new player entering
the scene. The type of false association during
occlusion depends on the duration of the occlusion.
The parameter that defines the duration of a long
occlusion is denoted as δ
b
. This parameter is defined
in the affinity estimation part of the network,
specifying the number of previous frames the network
considers during association (Sun, 2019). This means
that if the occlusion lasts for a duration longer than δ
b
(which is set to 15 frames in our study), then the
occluded player will be considered as a new player
and will be assigned a new ID. If the occlusion lasted
less than δ
b
, then the occluded player either retains the
same ID before swapping, or the IDs are swapped
between the occluded and the occluding player, and
that depends on the networks ability to compute
affinities.
Figure 6: Occlusion suggestion for player ID 19 (green box)
and player ID 17 (blue box) with the suggestion bounding
box drawn on the pitch zone where occlusion case has
occurred.
We have developed an occlusion detection
algorithm to aid in identifying possible occlusions
during the game. The algorithm utilizes a sliding
window of 50 frames (2 seconds) to the algorithm
with a 50% overlap between consecutive windows
where each window contains the coordinates and IDs
FOOTBALLTrace: An AI-Based System for Football Player Tracking with Occlusion Detection and Trajectory Correction
197

of the detected players. The algorithm then computes
a mutual Euclidean distance matrix for players in
each frame within the window. A possible occlusion
is identified if the distance between two or more
players is less than or equal to a proximity threshold
(Ʈ). In this work, Ʈ is set to 4 for the purpose of
reproducibility. Optimization of this parameter is left
for future work.
If a possible occlusion occurs for a duration equal
to or more than 50% of the window length, the IDs of
these two players are marked as possible occlusions.
A bounding box is drawn around the pitch zone where
the possible occlusion case took place, along with
printing the time stamp (in minutes and seconds)
corresponding to this case (Figure 6). An operator can
refer to the original game camera feed and confirm
the possible occlusion before it is input to the
trajectory correction algorithm.
3.4 Trajectory Correction
Figure 7: The effect of Savitzky-Golay smoothening filter
on a trajectory. (Left): Trajectory before smoothening.
(Right): Smoothed trajectory.
We introduce a novel trajectory correction algorithm
to re-connect disrupted trajectories in confirmed
occlusion events (Algorithm 1). The algorithm
utilizes geometrical analysis of trajectories (tracks)
within a 5-second window around the occlusion
event. However, this step is preceded by a trajectory
pre-processing phase aimed at smoothing out the
trajectory by eliminating noise in the player’s
movement and unwanted trajectory breaks, as
depicted in Figure 7.
To smooth out the trajectory, we employed the
Savitzky-Golay (SG) filter (Schafer, 2011) . The SG
filter applies a polynomial of order (n) to a subset of
trajectory points within a defined window (w).
Smoothed trajectories are then resampled using a step
(s). The smoothed and resampled trajectory is used
for the trajectory correction step described in Figure
8. We choose a point (P) on the trajectory, which is
Data: Disrupted trajectories of the players
involved in a manually confirmed occlusion
case.
Result: Corrected trajectories of the players
involved in a manually confirmed occlusion
case.
For point P(i) in the disrupted trajectory array
T do
calculate v1 and v2 and angle between them
v1 = P(i) – P(i-1);
v2 = P(i) – P(i+1);
Angle = dot (v1, v2) / (norm(v1)
*norm(v2));
Append calculated angle to angles array
Find index of minimal angle in Angles array
(I
min
)
Find point P(I
min
)
Divide Trajectory (T) at P(I
min
)
T-before = T (0 to P(I
min
));
T-after = T(P(I
min
) to len(T));
Connect T-before of the occlud(ed) player to T-
a
f
ter o
f
the occlud(in
g
) pla
y
e
r
Algorithm 1: Trajectory Correction algorithm.
neither the first nor the last point, is chosen as a pivot
point. Two vectors (V1 and V2) are then calculated
from the pivot point to a point prior to P on both sides
(e.g., P(i-1) and P(i+1) in Figure 8). The angle (θ)
between the two vectors V1 and V2 is calculated
using the dot product formula in Equation 1:
θ
𝑉
⨀𝑉
|
𝑉
|
.|
|
𝑉
|
|
(1)
Figure 8: Geometrical Trajectory Analysis. Player moving
left to right, where P(i) is the pivot point on the re-sampled
trajectory.
At each point P
i
, the angle θ
is calculated and
stored in an array of angles. The index of the minimal
angle in the array corresponds to the index of the point
P
i
where the breakpoint occurs, marking the moment
of occlusion. We then divide the trajectory at this
point into two trajectories (T
before
& T
after
). The
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
198
process of finding the breakpoints is applied to the
trajectories of both the occluded and occluding
players. Trajectory correction is then applied by re-
connecting the trajectories such that T
before
of the
occluded player is connected to T
after
, of the occluding
player and vice versa (Figure 9). Corrected
trajectories are then assigned to the correct player ID
before the occlusion event occurrence.
Figure 9: Trajectory Correction Example. (Upper):
trajectories of two occluded players before correction.
(Lower): corrected trajectories using the proposed trajectory
correction algorithm.
3.5 Parameters Optimization
The performance of the trajectory correction
algorithm depends on three hyperparameters: The
Savitzky Golay filter window size (w), which
determines the number of data points used for curve
fitting, the polynomial order (n), which specifies the
order of the polynomial used to for fitting the data
within the window (w), and the step size (s), which
determines the interval at which the trajectory is
resampled for geometrical analysis and vector
calculations.
We divided our occlusion dataset into 80% (64
trajectories) for training and 20% (16 trajectories) for
testing. To select the best set of parameter values, we
performed a grid-search with 5-fold cross validation
on the training dataset. Our grid search was limited to
window sizes of [5,7,9], polynomial orders of [2,3,4],
and step sizes of [5,7,9,10] to expedite the results. It
is worth mentioning that those parameters were
constrained so that the polynomial order must be
smaller than the window size in order to fit the
polynomial using the data points within the window.
4 RESULTS AND DISCUSSION
The player detection and association steps were
executed on an Nvidia GTX 2080 GPU with 8 GB V-
RAM. The YOLO object detector was configured to
detect a single class, “Person”, and it successfully
detected the players in the scenes with 87% accuracy
during non-occlusion events as seen in Figure 8. The
detection accuracy is calculated by comparing the
number of detected persons in non-occlusion events
to a reference value of 23 persons, which represents
the expected number of individuals on the pitch (22
players+ 1 Referee). However, in cases where there
are failed detections in certain frames, these missed
detections are often detected in later consecutive
frames. Since the DAN does not rely on feeding
adjacent frames, it can effectively compensate for
these dropped detections during the association
process. The average runtime for the detection
algorithm is 0.25 second per frame to detect all
players.
On the other hand, the association step had an
error rate of 20%, which is calculated as number of
wrong player ID associations following an occlusion
event divided by the total number of occlusion events
in the game.
The occlusion detection algorithm detected 211
potential occlusion events in the game, refined to 40
events (80 trajectories) which were manually
confirmed. There is a noticeable difference between
the number suggested occlusion events and the
number of manually confirmed events because the
occlusion detection algorithm only considers the
Euclidean distance proximity between the detected
players. However, this proximity could occur when
two players get close for a limited number of frames.
In such cases, the DAN is capable enough to
overcome the occlusion and successfully associate
those players. Meanwhile, the occlusion detection
algorithm may still indicate this situation as a possible
occlusion due to spatial proximity.
The trajectory correction algorithm successfully
corrected 87.5% (70 trajectories) of the 80 disrupted
trajectories from the manually confirmed occlusion
events. The values of the hyperparameters (w, n and
s) used for the trajectory correction algorithm were
chosen through majority voting among the values that
yielded the highest validation accuracy (Table 2), as
described in section 3.5. The majority voting process
resulted in choosing a window of length 7, a
polynomial order of 2, and a step size of 7. The
average validation accuracy recorded was 90.5% on
the training data.
FOOTBALLTrace: An AI-Based System for Football Player Tracking with Occlusion Detection and Trajectory Correction
199
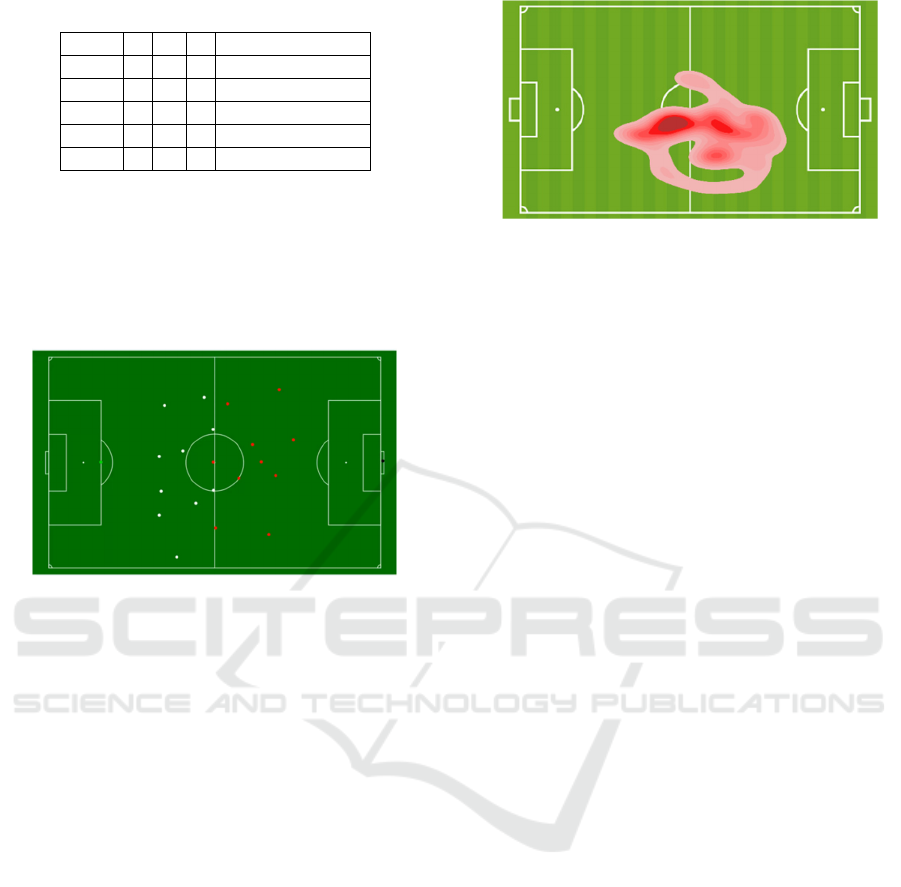
Table 2: Cross Validation Results.
Fold # s w n Validation Accuracy
0 7 7 2 0.923
1 9 5 2 0.846
2 7 7 2 1.0
3 7 7 2 0.923
4 9 5 4 0.833
The 10 discontinued trajectories are corrected
manually to generate complete and usable low-cost,
contactless player tracking data. The complete
tracking data can be visualized on 2D maps as shown
in Figure 10 and used to plot player movements as in
heatmap in the Figure 11.
Figure 10: A 2D visualization of the generated tracking data.
Overall, our proposed system is capable of providing
a semi-automated tool to collect tracking data through
entire game using the recorded match feed. To the
best of our knowledge, FOOTBALLTrace is the first
AI-based system to produce complete tracking data
that can be used in lieu of the GPS modules.
5 LIMITATIONS AND FUTURE
WORK
Although FOOTBALLTrace is an important step
towards the practical application of AI and Computer
vision-based tracking systems, manual interventions
are still required to generate usable AI-based football
tracking data. To develop fully automated and
accurate systems, more domain specific training
datasets are need. In this study, we were limited by
the lack of publicly available football tracking data.
Therefore, we utilized an object association network
(i.e., DAN) that is trained on pedestrian tracking data.
It is worth noting that pedestrian tracking data exhibit
less similarity between tracked objects, whereas
football tracking data exhibit a higher degree of
similarity between players, leading to more
unresolved occlusion events.
Figure 11: An example player movement over a specific
game segment of 5 min.
As a future solution, we plan to use
FOOTBALLTrace with minimal human
interventions to construct labeled football tracking
data and utilize transfer learning to improve the
performance of the DAN while reducing the number
of human interventions. Furthermore, we intend to
investigate the impact of increasing the track memory
parameter δ
b
on association performance during long-
term occlusions. Additionally, we will explore
optimization techniques such as grid search, coupled
with other types of distance metrics (i.e. Manhalobi’s
distance), to identify the optimal proximity metric
and threshold (Ʈ) for improving performance of the
occlusion detection algorithm.
Finally, we aim at reducing the runtime of our
system to generate a real-time tracking data.
Currently, the runtime of FOOTBALLTrace on a full
game (90 minutes) is approximately one day to
generate complete tracking trajectories. While real-
time tracking data collection may not be essential for
tactical and performance analysis, we plan to enhance
the runtime by implementing the entire system using
C++ and efficient GPU programming.
ACKNOWLEDGEMENTS
We would like to express our gratitude to Salma
Hazem, Doaa El Sherif, and Mohamed El-Badry at
KoraStats, Egypt, for providing us with the necessary
facilities and access to the video recordings of
football games, and for their efforts in implementing
the image stitching algorithm to create the panoramic
view data.
REFERENCES
(2023, June). Retrieved from Tagg Maker: https://tagg-
maker.com/home/
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
200

Andriluka, M. R. (2008). People-tracking-by-detection and
people-detection-by-tracking. IEEE Conf. on Computer
vision and pattern recognition (pp. 1-8). IEEE.
Arnason, A., Sigurdsson, S., Gudmundsson, A., Holme, I.,
Engebretsen, L., & Bahr. (2004). Physical fitness
injuries, and team performance in soccer. Medicine &
Science in Sports & Exercice, 278-285.
De Silva, V. C. (2018). Player tracking data analytics as a
tool for physical performance management in football:
A case study from Chelsea Football Club Academy.
Sports. MDPI -Sports.
Dejonghe, T. A. (2007). The popularity of football games
in the world. Is there a relation with hegemonic power?
Van Christaller Tot Wallerstein, 39-50.
Edgecomb, S. J. (2006, May). Comparison of global
positioning and computer-based tracking systems for
measuring player movement distance during Australian
football. Journal of science and Medicine in Sport, 9(1-
2), pp. 25-32.
Forcher, L. A. (2022). The use of player tracking data to
analyze defensive play in professional soccer-A
scoping review. International Journal of Sports Science
& Coaching, 1567-1592.
Kim, J. J. (2019, October 16). The attacking process in
football: a taxonomy for classifying how teams create
goal scoring opportunities using a case study of crystal
Palace FC. Frontiers in psychology, 10(2202).
KORASTATS. (2023, July). Retrieved from KORASTATS:
https://korastats.com/site/
Lin, T. Y. (2014). Microsoft coco: Common objects in
context.. Computer Vision–ECCV 2014: 13th European
Conference Proceedings (pp. 740-755). Zurich,
Switzerland: Springer.
Luo, W. X. (2021, April). Multiple object tracking: A
literature review. Artificial Intelligence, p. 293.
Once- Video Analysis. (2023, June). Retrieved from
https://once.de/
Pifer, N. D. (2019). Data analytics in football: Positional
data collection, modeling, and analysis. Journal of
Sport Management, 574.
Premier League Clubs Revenue By Stream. (2023, June).
Retrieved from Statista: https://www.statista.com/sta
tistics/556893/premier-league-clubs-revenue-by-stream/
Rein, R. &. (2016, August 24). Big data and tactical
analysis in elite soccer: Future challenges and
opportunities for sports science. Springerplus.
Sabirin, H. S. (2015, August 1). Automatic soccer player
tracking in single camera with robust occlusion
handling using attribute matching. IEICE
TRANSACTIONS on Information and Systems, 98(8),
pp. 1580-1588.
Schafer, R. W.-1. (2011, June). What is a Savitzky-Golay
filter? IEEE Signal processing magazine, 28(4), pp.
111-117.
Simonyan, K. &. (2014). Very deep convolutional networks
for large-scale image recognition. arXiv preprint .
Sun, S. A. (2019). Deep affinity network for multiple object
tracking. IEEE transactions on pattern analysis and
machine intelligence, pp. 104-119.
Szeliski, R. (2007, January 2). Image alignment and
stitching: A tutorial. Foundations and Trends in
Computer Graphics and Vision, 2(1), pp. 1-104.
Thomas, G. G. (2017). Computer vision for sports: Current
applications and research topics. Computer Vision and
Image Understanding, 3-18.
Tierney, P. &. (2019, April 24). A Comparison of a
Smartphone App with Other GPS Tracking Type
Devices Employed in Football. Exercise Medecine.
Wang, C. Y. (2023). YOLOv7: Trainable bag-of-freebies
sets new state-of-the-art for real-time object detectors.
IEEE/CVF Conference on Computer Vision and
Pattern Recognition (pp. 7464-7475). IEEE.
Zhang, J. J. (2018). The sport industry in growing
economies: critical issues and challenges . International
Journal of Sports Marketing and Sponsorship.
Zhao, Z. Q. (2019, January 27). Object detection with deep
learning: A review. IEEE transactions on neural
networks and learning systems, 30(11), pp. 3212-3232.
FOOTBALLTrace: An AI-Based System for Football Player Tracking with Occlusion Detection and Trajectory Correction
201
