
Development of Kendo Motion Prediction System for
VR Kendo Training System
Yuki Saigo
1
, Sho Yokota
1a
, Akihiro Matsumoto
1b
, Daisuke Chugo
2c
,
Satoshi Muramatsu
3
and Hiroshi Hashimoto
4d
1
Dept. of Mechanical Engineering, Toyo University, Saitama, Japan
2
School of Engineering, Kwansei Gakuin University, Sanda, Japan
3
Dept. of Applied Computer Eng., Tokai University, Hiratsuka, Japan
4
Adv. Institute of Industrial Tech., Shinagawa, Japan
Keywords: Sports Training, Machine Learning, Human Motion Prediction, Recurrent Neural Network.
Abstract: In this study, we developed and evaluated a system within the system to predict the user’s Kendo (Japanese
fencing) motions which is the function of the VR Kendo system that enables easy Kendo training at home or
in similar settings. We utilized markerless motion capture and machine learning based on recurrent neural
networks (RNN) to learn and predict kendo motions. As a result, the proposed system successfully predicted
Kendo motions as it started with high accuracy.
1 INTRODUCTION
Training is crucial for improving skills in any sport.
Sports training typically requires a designated
location and training partners. Depending on the sport,
some activities are easy to train, and others are not.
An example of a sport that is easy to train is long-
distance running. Long-distance running can be
trained alone near one's home, such as on nearby
roads or tracks.
On the other hand, kendo is one of those sports
that are not easy to train without a training partner.
Kendo is one of the Japanese martial arts in which
players wear protective gear and use bamboo sword
to fight each other, namely, it is "Japanese fencing".
The purpose of kendo is to strengthen the body and
mind and to build moral character through continuous
training (All Japan Kendo Federation, 2023). In the
case of kendo, there must be at least two persons
wearing training uniforms and protective gear and
holding bamboo swords. Furthermore, an indoor
facility with sufficient space to swing the bamboo
sword is required. Therefore, it is possible to
overcome space constraints by utilizing a virtual
a
https://orcid.org/0000-0002-8507-5620
b
https://orcid.org/0000-0002-3004-7235
c
https://orcid.org/0000-0002-3884-3746
d
https://orcid.org/0000-0003-2416-8038
environment (VR). Additionally, if training partners
can be provided as virtual agents within the virtual
space, engaging in easy kendo training at home or
similar locations would be possible. In particular, in
actual Kendo training, the process of players mutually
predicting each other's motions(techniques) is crucial.
We think more practical training is possible if the
agent confronting the user in the virtual environment
can predict the technique's motion when the user
performs it. Therefore, in this study, we develop the
Kendo motion prediction system as a first step toward
realizing this system. In particular, this paper
proposes a method for predicting the type of
techniques at the moment of its execution, i.e., the
moment when a user performs a "Men", "Kote",
"Dou" or "Stance" motion.
There have already been several studies on kendo
training systems. A method for predicting kendo
movements using GMM from body and bamboo
sword motion capture (Y. Tanaka, K. Kosuge, 2014),
a training system that provides feedback on kendo
movements using IMU (M. Takata, Y. Nakamura et
al., 2019), and a system that predicts kendo
movements using machine learning and markerless
motion capture from information obtained from two
532
Saigo, Y., Yokota, S., Matsumoto, A., Chugo, D., Muramatsu, S. and Hashimoto, H.
Development of Kendo Motion Prediction System for VR Kendo Training System.
DOI: 10.5220/0012233000003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 532-539
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
high-speed cameras (Cao, Yongpeng, Yuji
Yamakawa, 2022). On the other hand, this research
aims to develop an easy and practical VR kendo
practice system using a small bamboo sword-type
controller and a motion acquisition system using only
one camera in pursuit of convenience.
2 CONCEPT OF VR KENDO
TRAINING SYSTEM
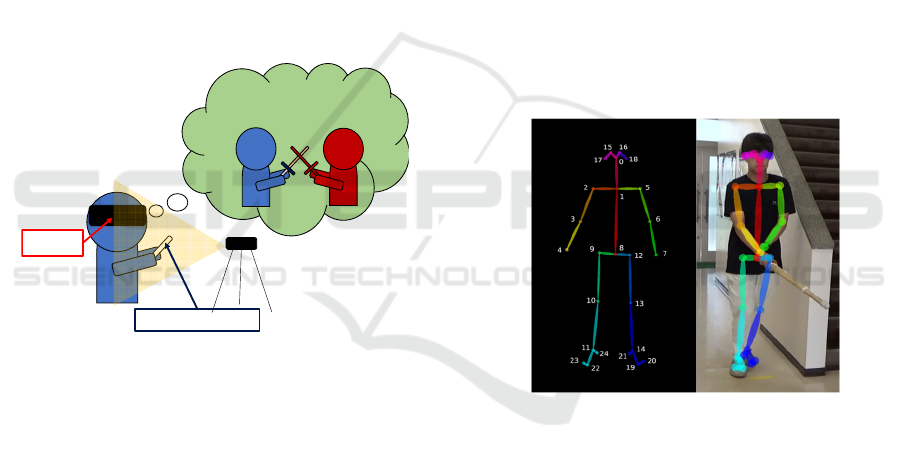
A concept of the proposed VR Kendo training system
is shown in Figure 1. The user wears a Head-Mounted
Display (HMD) and holds a small VR controller that
resembles a bamboo sword. The user performs kendo
motions in front of a camera that measures the user’s
motion. Within the user's field of view in the HMD, a
virtual opponent is standing in front of them. The user
trains kendo with the virtual opponent in the VR
environment.
Figure 1: Concept of VR Kendo training system.
Generally, it is desirable for the training
environment of a sport to resemble the actual
competition environment as closely as possible.
However, practicing VR Kendo with a regular
bamboo sword requires enough space to swing the
sword freely. Therefore, a VR-specific miniaturized
bamboo sword is required, shorter in length than a
regular bamboo sword but still provides a similar
sense of swing. Furthermore, in Kendo training, it is
essential to have one-on-one training that simulates a
real match scenario. Both players explore each
other’s motion, predicting each other’s technique, and
determining how to react accordingly. This training is
crucial for enhancing skills in Kendo. Therefore, to
conduct more practical kendo training within the VR
environment, the virtual opponent should be able to
predict the user's motions. This paper proposes a
motion prediction system.
Two essential components are required to realize
a motion prediction system for kendo: a motion
capturing system for player’s motions and a motion
prediction system to predict future motions based on
the captured data.
2.1 Motion Acquisition System Using
OpenPose
One of the most effective methods to obtain human
motion is a motion capture system using markers to
the human body. Considering the purpose of this
study, this motion capture method is not suitable.
Putting markers on the body takes time and effort and
is far from easy. Therefore, this study used OpenPose
(Zhe Cao et al., 2017) to obtain kendo motion.
OpenPose is a method for estimating posture by
extracting the joints of humans using deep learning.
Input the video images, and it can detect 25 joint
points in 2D space. Figure 2 shows the extracted joint
points using OpenPose. OpenPose is a markerless
motion capture system that allows us to easily obtain
kendo motion with only one camera.
Figure 2: Extraction of joint points of a person holding a
bamboo sword by Openpose.
2.2 Motion Prediction System Using
Machine Learning
To predict Kendo motion from the user’s motion
obtained OpenPose, it is required to recognize Kendo
motion and the ability to process time series
information.
In this study, we used machine learning for these
requirements, and we decided to use recurrent neural
networks (RNNs), which are particularly good at
processing time series data. In this study, we develop
a user’s kendo motion prediction system that
combines OpenPose and RNN to realize an easy and
practical Kendo training system.
Development of Kendo Motion Prediction System for VR Kendo Training System
533
3 MACHINE LEARNING WITH
RNN
In this section, we explain the RNN used for machine
learning for Kendo motion prediction and more
details of the machine learning with data obtained
from OpenPose as input.
3.1 Overview of RNN (and LSTM)
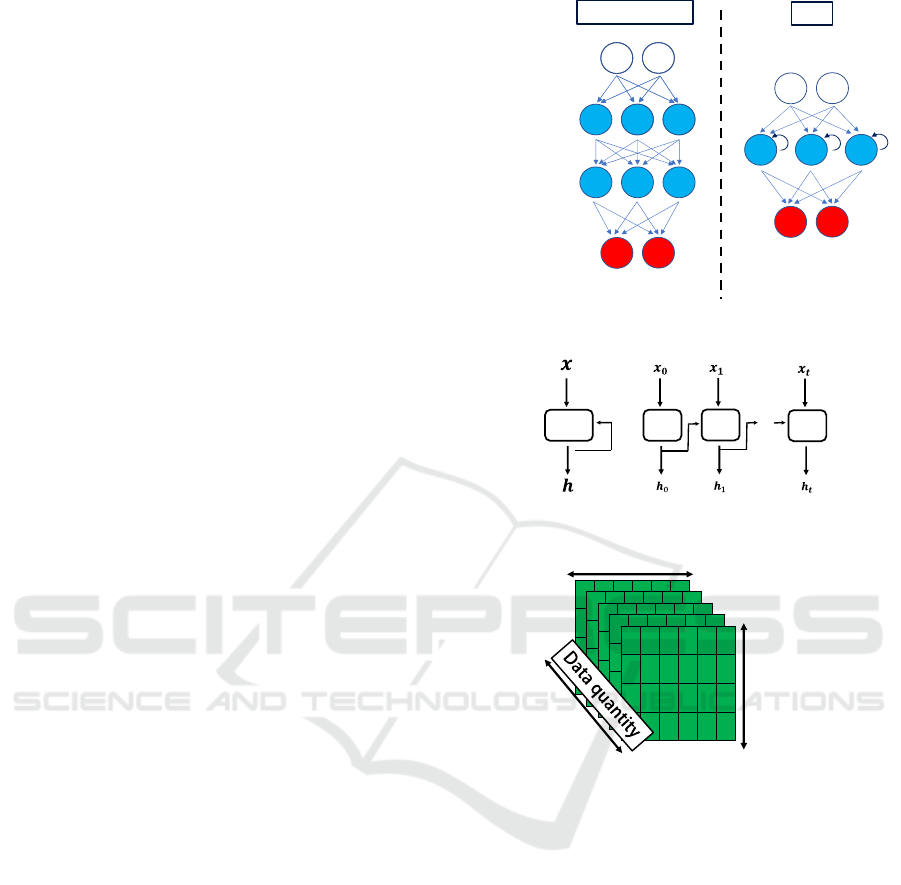
Figure 3 compares a typical feed-forward neural
network with an RNN model. Generally, neural
networks transmit information in only one direction,
from input to output, however, RNNs have a loop
structure in the middle layer that sends output results
to itself. Figure 4 depicts an expanded loop structure.
Where 𝒙 is the input and 𝒉 is the output, this makes it
possible to use past information as new input to itself.
Thus, each input can be treated as a series of input
data rather than independently, making it possible to
process time-series data.
However, traditional RNNs have limitations in
retaining long-term temporal information, leading to
the loss of sequential patterns when processing data.
Therefore, in this study, we use Long Short-Term
Memory (LSTM) networks developed to improve
RNN (Hochreiter.S, Schmidhuber. J, 1995). Since
LSTM can retain long-term data dependencies, it is
assumed to be able to estimate the user's unique
behaviour patterns. Therefore, the user and agent
interaction could be more active. As mentioned above,
the input to LSTM is not unit data but a series of input
data holding time-series information, i.e., a collection
of multiple data generally represented as a three-
dimensional array, as shown in Figure 5.
The first dimension (horizontal) represents the
features of the data, the second dimension (vertical)
represents the time steps of the sequence, and the
third dimension (depth) represents the number of data.
The larger the feature dimension, the more
information the data will have. Similarly, the greater
the number of time steps, the greater the processing
capacity is required, and the greater the number of
data the greater the amount of input data. However,
since the third dimension is just the quantity of data,
the first and second-dimension elements are
computed in LSTM. Therefore, it is essential to tune
properly the features and time steps for learning. Next,
we will discuss the data obtained using OpenPose.
Figure 3: Comparison of Neural Networks and RNNs.
Figure 4: Deployment of RNN loop structure.
Figure 5: Image of input data shape.
3.2 Input Data from OpenPose
As described in Section 2.2, OpenPose can extract 25
joint points from a person in the input video and store
each joint point's x and y coordinates for each frame.
Hence, 50 points of coordinate information can be
obtained from each frame, and the same number of
coordinate information is stored for the video frames.
Figure 6 shows an overview of the data available from
OpenPose.
The number of features in this study is 50 because
the coordinate information in each frame may contain
critical information. All joint coordinates are
expressed in relative coordinates to the midpoint of
the person's waist as origin, and 50 data points
expressed in relative coordinates were treated as
features. Since the information handled by OpenPose
is two-dimensional, a simple change in the positional
relationship between the camera and the person may
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
534

interfere with the acquisition of coordinate
information for the joints in motion.
In the time step, we used a few frames of a part of
the video. The reason for not treating the entire video
(meaning through start to end of motion) frames as a
time step is that the purpose of the research is motion
prediction, and if it can't be classified by a part of the
motion, it is meaningless. In other words, if the entire
video frames are used as a time step, the motion can
be classified (predicted) only after the technique is
completed.
The data quantity was calculated by dividing the
total frames of the video by the number of time steps.
Since the number of time steps is arbitrary, the
amount of data depends on the size of the number of
time steps. If there are many videos, the frame
information of all videos is combined and divided by
the number of time steps.
3.3 Machine Learning
There are four kendo motions to be learned: "Men",
"Kote", "Dou", and "Pose". Men" refers to the head
strike, "Kote" refers to the right wrist strike, "Dou"
refers to the right abdominal strike, and "Pose" refers
to the stance motion. Figure 7 shows examples of
each motion.
There are two reasons for the addition of "Pose"
that is not technique. The first is that in kendo, the
time spent in stance is longer than the time spent
performing techniques. The second reason is that the
information that a player is not performing a
technique is necessary to predict the start of a
technique.
Figure 6: Overview of data obtained from OpenPose.
Figure 7: Examples of each Kendo motion.
3.3.1 Train Data
The video was captured during each motion and
analyzed with OpenPose to obtain motion data. Table
1 shows the number of frames and the number of data
in the captured video.
Because the average number of frames per video
is short, the number of frames used as a time step was
set to 5 frames for testing purposes. Therefore, the
shape of each dataset used for training is shown in
Table 2.
Table 1: Details of videos used for training data.
Table 2: Shape of each training data.
3.3.2 Neural Network Model for Learning
Kendo Motion
Figure 8 shows a diagram of the neural network
model used to train the kendo motions. To classify the
input data into four motions, the shape of the output
data is as follows (number of data, 4). The system also
has two LSTM layers. At the same time, a one-layer
LSTM is limited in the range of information because
of limited time steps; layering increases expressive
power and enables the capture of complex patterns
within a limited time step.
This idea is supported in natural language
processing (Sutskever, I et al., 2014). We also
incorporated it in this study since the time step is
limited to five frames. However, since LSTM can
only process two-dimensional data of time steps and
features at a time, the model is repeated as many times
as the number of data, with input and output at each
time step, as shown in Figure 9.
Men Kote Dou Pose
Number of videos
51 56 50 30
Average frames per video
86 71 112 140
Total frame s
4406 3973 5613 4223
Data quantity
(Time ste
p
= 5 frame s)
881 794 1122 844
Men Kote Dou Pose
Shape of train data
(881, 5, 50) (794, 5, 50) (1122, 5, 50 (844, 5, 50)
Development of Kendo Motion Prediction System for VR Kendo Training System
535
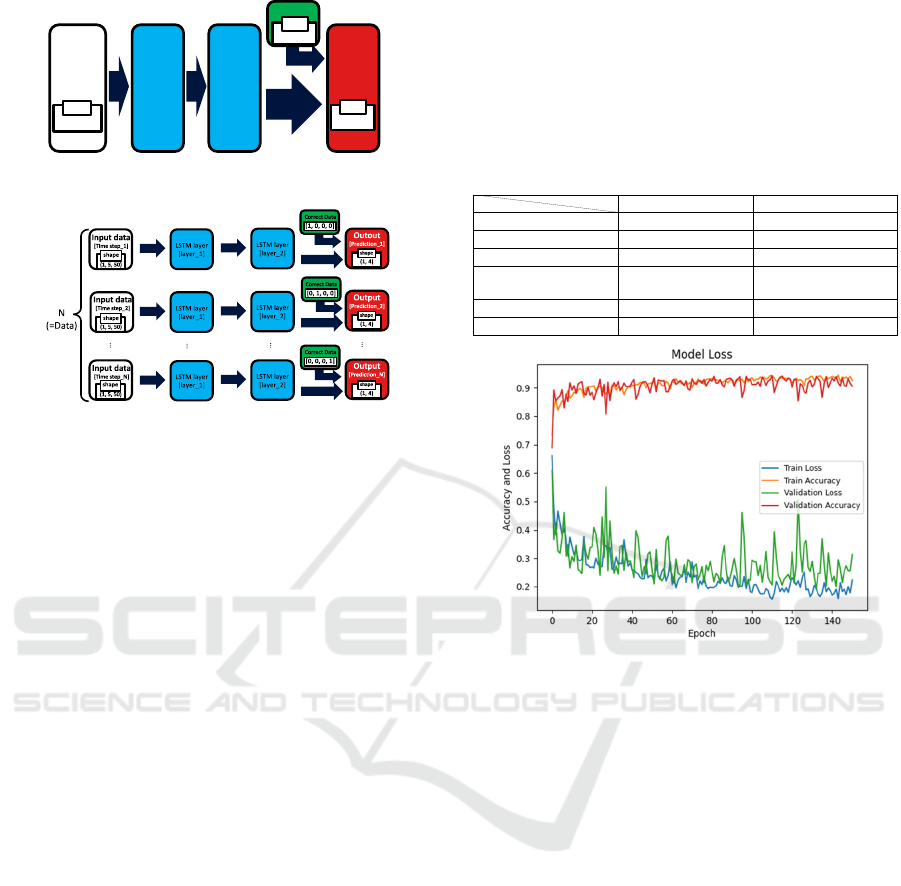
Figure 8: Entire Neural Network.
Figure 9: Details of the entire Neural Network.
The activation function used in the output layer is
the Softmax function commonly used in multi-class
classification problems; the values calculated from
the Softmax function are real numbers between 0 and
1, and the sum of the values of the four elements of
the output array is always 1. The predicted value of
which motion is likely can be calculated as a
probability value, and the class of elements with the
highest value is the predicted result.
The teacher data has the same data shape as the
output data and is input using one-hot encoding,
where the relevant element is set to 1 and the others
to 0, and the model trains using cross-entropy error.
3.3.3 Learning Kendo Motion
We searched for the optimal hyperparameters to be
used in learning. There are two methods for searching
hyperparameters: grid search and random search.
Grid search conducting a full search is more effective
(Bergstra, J. et al., 2012). Table 3 shows the hyper-
parameters and optimal parameters searched by grid
search. The number of nodes in the second LTSM
layer is half that of the first layer to suppress
overlearning.
Figure 10 shows the training results with the
training data and hyperparameters presented in
Tables 1, 2, and 3, where “Accuracy” represents the
percentage of correct answers and “Loss” indicates
poor performance. In learning, the model is evaluated
in real-time using newly prepared validation data
(data quantity is about 1/4 of the training data), which
is separate from the training data. To control
overlearning, we used “early stopping”, which
automatically terminates learning if no loss of
progress is observed in a certain epoch period.
As Figure 10 shows, in this learning process, the
learning is done accurately because similar trends are
observed in the training data and the validation data
as the learning progresses.
Table 3: Parameters explored and optimal results.
Figure 10: Learning Transition.
4 EXPERIMENTS AND
DISCUSSION
We experimented to evaluate whether the LSTM
model trained in the previous section could predict
(classify) each of the four Kendo motions.
Apart from the training and validation data, the
prediction performance was evaluated using data
obtained from joint coordinates by OpenPose from
newly captured Kendo motions for the prediction
experiment. In training, the motion data of four
techniques were inputted together. In this experiment,
data obtained from a single video showing a single
technique being recorded is used, assuming the data
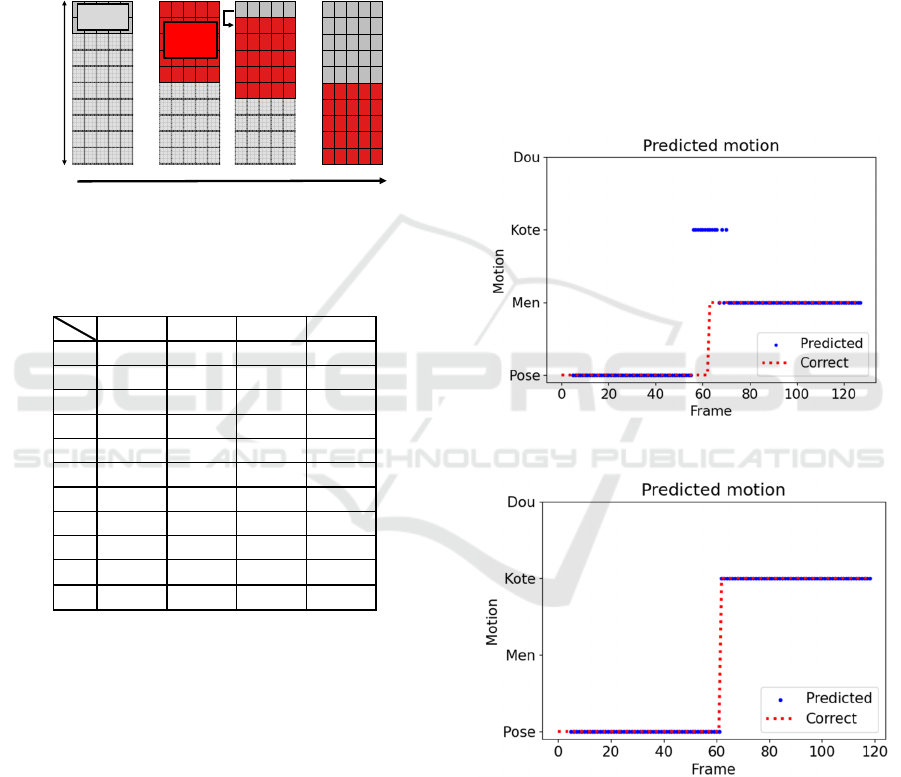
is used in real-time. Similarly, assuming real-time
prediction, data is inserted into the model one frame
at a time, as shown in Figure 11, and inference is
performed using the latest five frames as input data.
We conducted two types of experiments. The first
was an evaluation of each of the four kendo motions
alone, and the second was an evaluation of motion in
Pose in combination with the other motion.
Input
Data
LSTM
[layer_1]
LSTM
[layer_2]
Output
(Data, 4)
Correct Data
(Data, 4)
shape
(Data, 5, 50)
shape
shape
Se arch targe t Optimal combination
1st LSTM laye rs unit
(256, 512, 1024, 2048) 1024
2nd LSTM layers unit
Half of 1st layer 512
batch s ize
(32, 64, 128) 32
epoch
(100, 200, 400) 200
activation
only Softmax Softmax
optimizer
(SGD, Adam) Adam
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
536
4.1 One Motion Experiment
As in the training phase, the inferential actions were
from the start to the end of a single technique. The
motions of each technique were tested ten times and
evaluated based on the percentage of correct answers
compared to the prediction output by the model.
Table 4 shows the accuracy of each motion. The
accuracy is “the total number of correct responses /
the number of input frames” per input frame.
Figure 11: How to load experimental data.
Table 4: Accuracies of each motion prediction (one
motion).
Dou, Men, and Pose all exceeded 95%, indicating
that these motions are accurately predicted. Although
Kote's accuracy was slightly lower than that of the
other movements due to some mispredictions with
Men, which have similar movements, Kote was able
to correctly predict 89% of the movements, which can
be considered a success in general.
4.2 Two Motions Experiment
The target motion was defined as the period from the
state of Pose to Men, Kote, or Dou and the end of
those motions. In this experiment, not only the
accuracy of the motions but also the accuracy of the
prediction time sequence is important because the
target motion includes the moment when the subject
performs the technique from the state of Pose.
As experimental data, we prepared 15 videos for
each motion and evaluated them the same way as in
the previous experiment. Figures 12 to 14 show an
example of the predicted transition for each motion.
Table 5 shows the accuracies for each motion.
Although the accuracies decreased compared to the
previous experiment, the timing of the switch
between Pose and Strike motions was predicted
appropriately in many cases in all motions and can be
considered a success. One of the reasons for the
decrease in the accuracies was the misprediction
during the striking motion, which was observed
mainly in Men. The causes are discussed in the next
section.
Figure 12: Transition of prediction (Pose to Men).
Figure 13: Transition of prediction (Pose to Kote).
4.3 Discussion
The causes of the mispredictions listed in the previous
sub-section are discussed. Figure 15 shows how
mispredictions occur in the Men and Kote motions.
・・・ ・・・
Total
Frames
2
5
6
Frames
inferred
Frames
NOT inferred
Input frame
Men Kote Dou Pose
1
0.943 0.857 0.971 0.984
2
0.936 0.961 0.878 1.000
3
0.989 0.905 1.000 0.865
4
1.000 0.915 1.000 1.000
5
1.000 1.000 1.000 1.000
6
0.987 0.952 0.953 0.913
7
0.907 1.000 0.917 1.000
8
0.933 0.786 0.983 0.994
9
0.943 0.675 1.000 1.000
10
0.990 0.893 1.000 0.949
Ave 0.963 0.894 0.970 0.970
Development of Kendo Motion Prediction System for VR Kendo Training System
537
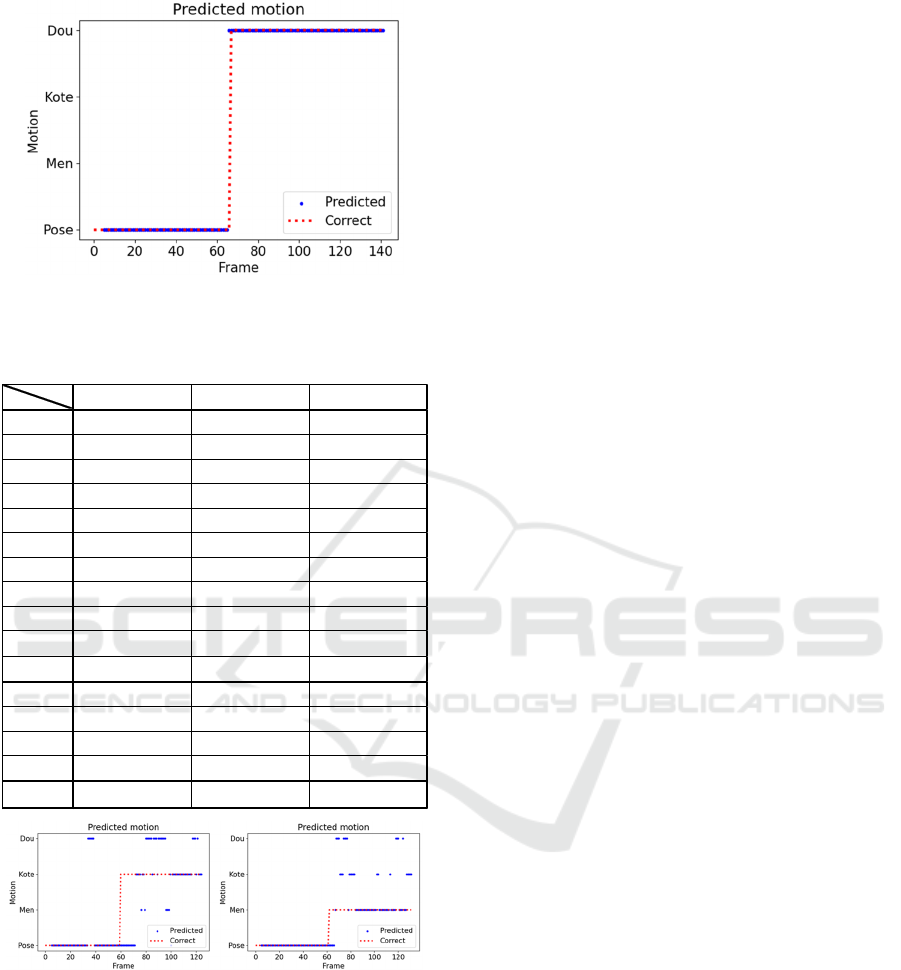
Figure 14: Transition of prediction (Pose to Dou).
Table 5: Accuracies of each motion prediction (two
motions).
Figure 15: Transition of prediction (Pose to Kote or Men).
In the Pose phase, all of the predictions are made
without any problem, but it can be seen that false
predictions occur after transitioning to the striking
motion. In this example, the prediction of the timing
of the motion changeover is also far from the correct
answer. One of these factors may be the similarity
between Men and Kote motion. Figure 7 shows that
Men and Kote swing bamboo swords vertically, while
Dou swings bamboo swords slightly horizontally, so
Men and Kote might be similar regarding player body
motion. Dou, who uses a different shinai swinging
motion, also achieved a very high accuracy (96%) in
the two-motions test, suggesting that the difference in
sword swinging motion significantly affects the
results.
However, the evaluation experiments of the single
kendo motion shown in Table 4 all produced a high
accuracy. Thus Figure 14 should also be stable during
the striking motions. In this case, the possibility of
overlearning due to insufficient training data cannot
be denied. Figure 10 shows that the difference
between Train and Validation losses widens slightly
after epoch 100. Although not to the extent of fatal
overlearning, overlearning should be prevented for
versatility.
Therefore, the improvements are to reflect the
differences between Men and Kote motion as
numerical values in the learning model by adding
joint position information that represents other joint
positions using the shoulder angle and the height of
the right foot as the origin as feature values, and to
increase the number of learning data and take
measures against overlearning in the learning phase.
5 CONCLUSION
In this paper, we developed a motion prediction
system for kendo motions with the aim to design a VR
Kendo system that allows users to easily training
Kendo at home and other places.
The proposed system is consisted with OpenPose
to obtain joint position information and machine
learning using RNN (LSTM) to learn and predict
kendo motions.
As a result, four kendo motions were predicted
with an accuracy rate of over 95%, while some
incorrect predictions were observed for the Men and
Kote motions. We consider that this is due to the
similarity between Kote and Men motions and slight
overlearning. Therefore, additional features and
learning data are needed to solve this problem.
As future works, we improve the machine
learning and develop a VR Kendo system using a
small controller for VR and the machine learning
model.
REFERENCES
All Japan Kendo Federation. (n.d.). What Is Kendo? In All
Japan Kendo Federation Web Site. https://www.
kendo.or.jp/en/knowledge/, Last accessed on July 17,
2023.
Pose to Men Pose to Kote Pose to Dou
1
0.894 0.826 1.000
2
0.838 0.829 0.973
3
0.748 0.812 0.963
4
0.796 0.897 0.965
5
0.791 0.876 0.993
6
0.791 0.983 0.971
7
0.848 1.000 0.986
8
0.755 0.828 0.944
9
0.826 0.658 0.957
10
0.714 0.780 0.844
11
0.622 0.913 0.930
12
0.765 0.811 0.937
13
0.706 0.805 0.933
14
0.762 0.836 0.963
15
0.826 0.845 0.978
Ave
0.779 0.847 0.956
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
538

Y. Tanaka and K. Kosuge, (2014) Dynamic attack motion
prediction for kendo agent, 2014 IEEE/RSJ
International Conference on Intelligent Robots and
Systems, 2187-2193.
M. Takata, Y. Nakamura, Y. Torigoe, M. Fujimoto, Y.
Arakawa, and K. Yasumoto. (2019). Strikes−thrusts
activity recognition using wrist sensor towards
pervasive kendo support system. 2019 IEEE
International Conference on Pervasive Computing and
Communications Workshops (PerCom Workshops),
243−248.
Cao, Yongpeng, and Yuji Yamakawa. (2022). Marker−less
Kendo Motion Prediction Using High−speed
Dual−camera System and LSTM Method. 2022
IEEE/ASME International Conference on Advanced
Intelligent Mechatronics (AIM), 159−164.
Bergstra, J., & Bengio, Y. (2012). Random Search for
Hyper-Parameter Optimization. The Journal of
Machine Learning Research, 13(1), 281–305.
Cao, Z., Simon, T., Wei, S., & Sheikh, Y. (2017). Realtime
Multi-Person 2D Pose Estimation Using Part Affinity
Fields. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, 7291–7299.
Hochreiter, S., & Schmidhuber, J. (1997). Long Short-Term
Memory. Neural Computation, 9(8), 1735–1780.
https://doi.org/https://doi.org/10.1162/neco.1997.9.8.1
735
Turvey, M. T., Park, H., Dumais, S. M., & Carello, C.
(1998). Nonvisible perception of segments of a hand-
held object and the attitude spinor. Journal of Motor
Behavior, 30(1), 3–19.
Sutskever, I., Vinyals, O., & Le, Q. V. (2014). Sequence to
Sequence Learning with Neural Networks. Proceedings
of the 27th International Conference on Neural
Information Processing Systems, 2, 3104–3112.
Development of Kendo Motion Prediction System for VR Kendo Training System
539
