
Interval Type-2 Fuzzy Control to Solve Containment Problem
of Multiple USV with Leader’s Formation Controller
Wen-Jer Chang
1
, Yann-Horng Lin
1
and Cheung-Chieh Ku
2
1
Department of Marine Engineering, National Taiwan Ocean University, Keelung, R.O.C., Taiwan
2
Department of Marine Engineering, National Kaohsiung University of Science and Technology, Kaohsiung, R.O.C.,
Taiwan
Keywords: Interval Type-2 Fuzzy Control, Containment Problem, Multiple USVs, Formation Controller.
Abstract: An interval type-2 (IT2) fuzzy controller design method is proposed in this paper to simultaneously solve the
formation and containment control problems of multi-unmanned surface vehicles (USVs) system. Via the
construction of IT2 Takagi-Sugeno Fuzzy Model (IT2T-SFM), the control problem of nonlinear multi-USVs
system can be transferred into the linear problem and the uncertain factors can be described more completely.
Based on the IT2T-SFM, the IT2 fuzzy formation and containment controller is designed by the imperfect
premise matching method to achieve the more flexible design process. When the IT2 fuzzy formation
controller is designed for the leader USVs system, some problems are occurred in the containment analysis
process. Therefore, the design concept for unknown leader’s input is extended to solve the problem. And a
technique is applied to obtain the less-conservative IT2 fuzzy controller design process for the containment
purpose. Finally, the simulation results are presented to verify the proposed design method.
1 INTRODUCTION
By virtue of the unmanned feature, the developments
of Unmanned Surface Vehicle (USV) and unmanned
aerial vehicle have rapidly grown up (Yan et al., 2010
& Ucgun et al., 2022). Especially, USV has become
an important role in the navy for every countries
because it can efficiently put people out of critical
danger in the extreme situations such as battlefields
and nuclear regions. It is witnessed that USVs can
efficiently substitute the human beings to achieve
various required tasks. In addition, USV has also been
extended to the control problem in daily-life (Manley,
2008). However, the dynamic of vessels whether the
ships maneuvered by human or USV often consist of
highly nonlinearities since the complex working
environment. These nonlinearities will make USV
difficult to perform well. In (Fossen, 1999),
researcher has established the nonlinear system to
represent dynamic behaviors of a navigating ship
more completely. And some researchers have
developed the control methods for USV with this kind
of nonlinear system (Gonzalez-Garcia et al., 2021).
Nevertheless, the complex environment and
disturbances still make mathematical models not
precise enough.
Over the past few decades, the control method
based on the multi-agent systems has attracted a lot of
attention. Benefiting from the rapid progress of
wireless transmission technology, the multi-agent
control system can be realized in various practical
applications (Jiang et al., 2019). Moreover, the
leader-following structure of multi-agent systems has
been proposed to further distinguish the tasks of each
agent (Jadbabaie et al., 2003). And the containment
control problem has been proposed when the leader
agents are more than one (Ji et al., 2008). Nowadays,
the formation control and containment control issues
are widely discussed for multi-USVs system (Zhou et
al., 2020 & Wu and Tong, 2022). Nevertheless, the
nonlinear systems are considered to develop the
control methods in these researches. Due to the
complex dynamic behaviors of a navigating USV,
directly designing a nonlinear controller is a
challenging task. Also, the controller is required to be
designed with a nontrivial process.
Using the if-then fuzzy rule, Takagi-Sugeno
Fuzzy Model (T-SFM) has been proposed to
represent nonlinear systems by many linear fuzzy
subsystems (Wang et al., 1996). Hence, the nonlinear
controller design problem is efficiently transferred
into linear problem. Over the past few decade, more
302
Chang, W., Lin, Y. and Ku, C.
Interval Type-2 Fuzzy Control to Solve Containment Problem of Multiple USV with Leader’s Formation Controller.
DOI: 10.5220/0012233700003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 302-310
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

and more research devoted their effort to solving the
control problem of nonlinear system using the T-SFM
(Precup et al., 2013). Moreover, some researchers
have developed the fuzzy controller design method to
improve control performances of a ship (Chang and
Hsu, 2016 & Chang et al., 2019). However, these
methods is based on the type-1 T-SFM, which isn’t
capable enough to deal with the uncertainties. It is
obvious that the dynamic behavior of a USV is much
more complex than the vehicles on the ground. In
addition, a lot of biofouling will also adhere to the
ship hull during the long-term transportation, which
generates the resistance to ship dynamics. And these
uncertain problems will become more serious in the
multi-USVs system due to the error dynamic
information continuously exchanged between USVs.
Extending the type-1 mebership function and T-SFM,
the Interval Type-2 T-SFM (IT2T-SFM) has been
developed to better describe the nonlinear systems
with uncertain factors (Bojan-Dragos et al., 2021 &
Lam et al., 2013).
In this paper, an IT2 formation and containment
fuzzy controller design method is proposed for multi-
USVs systems. Firstly, the IT2T-SFM is constructed
for nonlinear multi-USVs system based on leader-
following structure with the effect of uncertainties.
Referring to the results in (Lam et al., 2013), the IT2
fuzzy controller is designed for the IT2T-SFM using
the imperfect premise matching method to obtain the
less-conservative design process. Although the IT2
formation and containment control methods have
already been developed in (Lin et al., 2022). Some
imposed assumption is considered in the stability
analysis to achieve the containment purposes.
Extending the concept of (Li et al., 2021), the
containment analysis method is proposed without the
requirement of the assumption in this paper. However,
the analysis process will also become too
conservative by applying the method in (Li et al.,
2021). Because of the reason, the analysis method of
linear multi-agent system is extended to relax the
stability analysis process (Xi et al., 2011). Finally, the
simulation results of multi-USVs system is presented
to verify the formation and containment control
performances of the proposed design method.
2 SYSTEM DESCRIPTION AND
PROBLEM STATEMENT
In this section, a nonlinear system and IT2T-SFM are
established to describe the dynamic behaviours of
multi-USVs by combining with the uncertain factors..
According to the research for the analysis and control
problems of ship’s nonlinear dynamic behaviours
(Fossen, 1999), the constructive process of nonlinear
system for a moored tanker has been introduced based
on the ship’s parameters in (Fossen and Grovlen,
1998). Extending the nonlinear system, the nonlinear
multi-USVs system can be presented as follows.
() ()
()
()
()
() ()
()
()
()
()
1 3 14 4 3 15 5
x
t cosxt txt sinxt txt
ϑϑ ϑϑ ϑ
=+Δ−+Δ
(1)
() ()
()
()
()
() ()
()
()
()
()
2 3 24 4 3 25 5
x
t sinxt txt cosxt txt
ϑϑ ϑ ϑ ϑ
=+Δ++Δ
(2)
() ()
()
()
3366
1
x
ttxt
ϑϑ
=+Δ
(3)
() () () ()
4141
0.0358 0.0797 0.9215
x
txtxtut
ϑϑϑϑ
=− − −
(4)
() () () ()
() ()
5256
23
0.0208 0.0818 0.1224
0.7802 1.4811
x
txtxtxt
ut ut
ϑϑϑϑ
ϑϑ
=− − −
++
(5)
() () () ()
() ()
6256
23
0.0394 0.02254 0.2468
1.4811 7.4562
x
txtxtxt
ut ut
ϑϑϑϑ
ϑϑ
=− − −
++
(6)
where
()
1
x
t
ϑ
and
()
2
x
t
ϑ
are north and east position,
()
3
x
t
ϑ
is yaw angle,
()
4
x
t
ϑ
and
()
5
x
t
ϑ
are surge and
sway motion,
()
6
x
t
ϑ
is yaw angular velocity, and the
uncertain factors are considered as
() ()
14 36
~ttΔΔ
in
system (1)-(6). Note that the index
1, 2,...,
ϑ
=Φ+Ξ
denotes the agent number of USVs. The essential
information for the interaction topology is given in
the following definition according to graph theory.
Definition 1
For an undirected graph
Λ
, the structure of graph is
represented by nodes and edges which denote the
agents and the interaction between agents. The node
set is defined as
()
{
}
12
N n ,n ,...,n
Φ+Ξ
Λ=
and the edge
set is defined as
()
()
()
{
}
: En,nn,nN
ϑη ϑη
Λ⊆ ∈ Λ
. The
set of neighbour agents from
n
ϑ
is
() ()
()
()
{
}
: ZnNn,nE
ϑϑη
Λ= ∈ Λ ∈ Λ
. Then, the
adjacency matrix is defined as
()()
Rj
ϑη
Φ+Ξ × Φ+Ξ
=∈
J
. In matrix J, the element values
1j
ϑη
=
and
0j
ϑη
=
respectively denote there is and isn’t an interaction
between agent
n
ϑ
and
n
η
. The degree matrix is also
constructed with the element of J as
() ( )
{
}
1
1
00diag , , ,d ,...,d
Φ
Φ+ Φ+Ξ
=D where
1
dj
ϑϑη
η
Φ+Ξ
=
=
and
{
}
diag
denotes the diagonal
matrix with the item
. Therefore, the Laplacian
Interval Type-2 Fuzzy Control to Solve Containment Problem of Multiple USV with Leader’s Formation Controller
303
matrix is obtained as follows by =−LDJ to
represent the interaction relationship of all the agents.
21
=
00
L
LL
(7)
where
1
R
Ξ×Ξ
∈L denotes the interaction between
followers and
2
R
Φ×Ξ
∈L denotes the interaction from
leaders to followers. To develop the IT2 fuzzy
controller, the IT2T-SFM is constructed for nonlinear
multi-USVs system (1)-(6) as follows
Model Rule
α
: If
()
3
x
t
ϑ
is
M
α
, then
() () ()
x
txtut
ϑϑϑ
αα
=+AB
(8)
where
() () () () () () ()
T
123456
x
t xtxtxtxtxtxt
ϑ ϑϑϑϑϑϑ
=
,
() () () ()
T
123
ut ut ut ut
ϑ ϑϑϑ
=
and
1, 2, 3
α
=
. To
demonstrate the effectiveness of IT2 membership
function in the uncertain problem, the model matrices
α
A and
α
B are selected same as the type-1 T-SFM
(Chang and Hsu, 2016 & Chang et al., 2019)
according to the following operating points.
T
o
1
00 90 000
op
x
ϑ
=−
,
T
o
2
000 000
op
x
ϑ
=
,
T
o
3
0090 000
op
x
ϑ
=
.
Note that
1
A and
1
B of fuzzy rule 1 are related to
1op
x
ϑ
and so on. Considering three operating points,
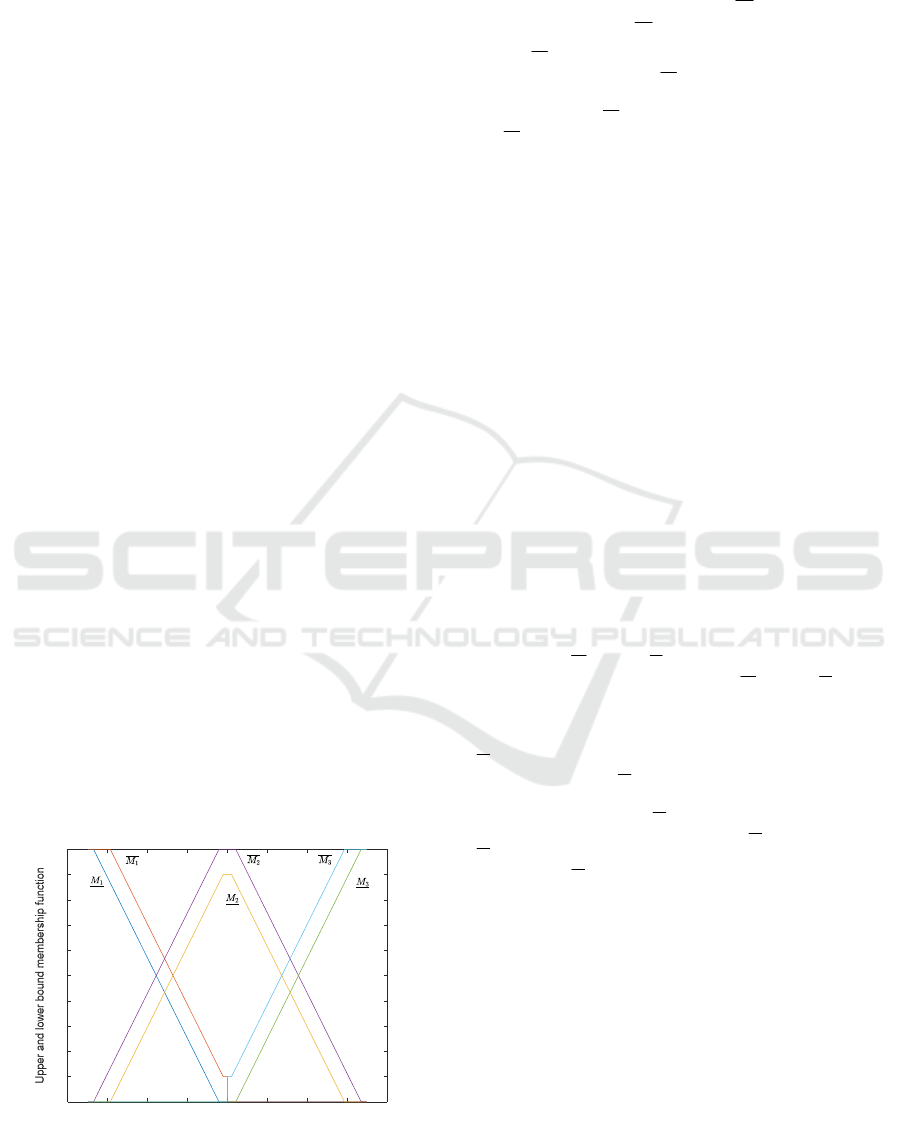
the IT2 membership function is designed in Figure 1
to more completely describe the uncertain factors.
Figure 1: IT2 membership function of IT2T-SFM.
Based on the IT2 membership function the Fig. 1, the
fired strength for IT2T-SFM (8) is obtained as
()
()
()
()
()
()
333
MM,M
x
txtxt
ϑϑϑ
α
α
α
=
(9)
where
()
()
3
M
x
t
ϑ
α
and
()
()
3
M
x
t
ϑ
α
denotes the upper
and lower bound membership functions which satisfy
()
()
()
()
33
0M M 1xt xt
ϑϑ
α
α
≤≤≤.
To achieve the formation purpose, the IT2T-SFM
(8) is further presented into the following form.
Model Rule
α
: If
()
3
x
t
ϑ
is
M
α
, then
() () ()
() () ()
1,...,
1,...,
ttutfor
xt xt ut for
ϑϑϑ
αα
ϑϑϑ
αα
ϖϖ ϑ
ϑ
=+ =Φ
=+ =Φ+Φ+Ξ
AB
AB
(10)
where
() ()
txt
ϑϑ ϑ
ϖ
=−ℜ
denotes the translated
state vector with the desired value vector
ϑ
ℜ
for the
states of leader USVs. Then, the following overall
IT2T-SFM is inferred from the model (10) with (9).
() ()
()
() ()
{
}
3
3
1
Mtxttut
ϑϑϑϑ
ααα
α
ϖϖ
=
=+
AB
1, 2,...,for
ϑ
=Φ (11)
() ()
()
() ()
{
}
3
3
1
M
x
txtxtut
ϑϑϑϑ
ααα
α
=
=+
AB
1, 2,...,for
ϑ
=Φ+ Φ+ Φ+Ξ (12)
where
()
()
()
()
()
()
()
()
()
()
33333
MM M
x
t xtxt xtxt
ϑϑϑϑϑ
αα
αα
α
=Ω+Ω
,
()
()
3
M0xt
ϑ
α
≥
and
()
()
3
3
1
M1xt
ϑ
α
α
=
=
. Note that
()
()
3
x
t
ϑ
α
Ω and
()
()
3
x
t
ϑ
α
Ω denote the nonlinear
functions which are unnecessary to be known. These
functions satisfy
()
()
()
()
33
10xt xt
ϑϑ
α
α
≥Ω ≥Ω ≥ and
()
()
()
()
33
1xt xt
ϑϑ
α
α
Ω+Ω=. According to (10), the IT2
fuzzy formation and containment controller can be
designed as follows.
Controller Rule
β
: If
()
3
x
t
ϑ
is
N
β
, then
() ()
() () ()
()
()
1,...,
1,...,
N
ut t for
ut jxtxt for
ϑϑ
β
ϑϑη
βϑη
η
ϖϑ
ϑ
∈Λ
==Φ
=−=Φ+Φ+Ξ
F
K
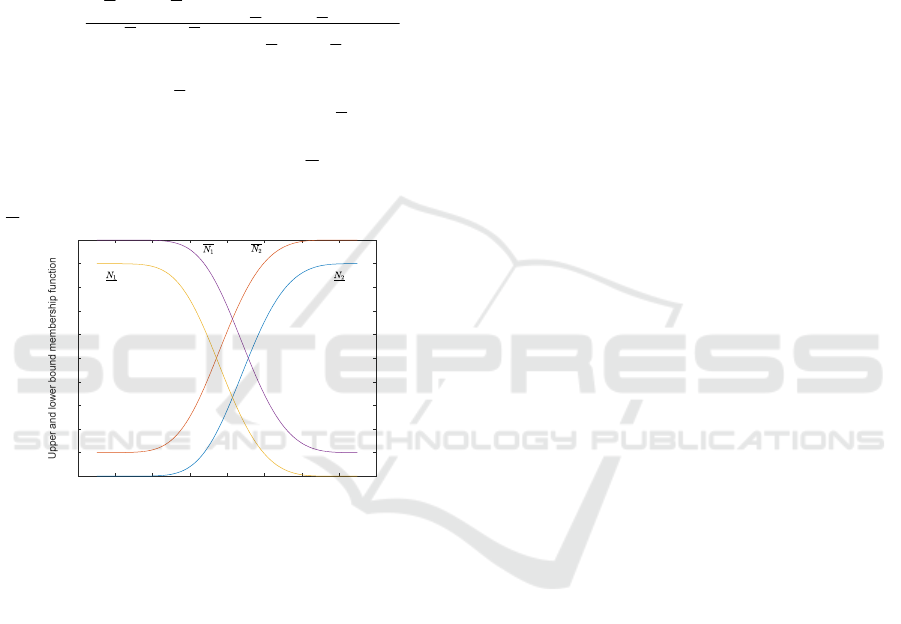
(13)
where
N
β
denotes the IT2 fuzzy set and
β
denotes
the rule number of IT2 fuzzy controller,
β
F
and
β
K
denote the feedback gains to be designed. And the IT2
membership function of (13) is designed in Figure 2.
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
x3(t)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
304
Then, the IT2 fuzzy controller (13) is referred into
overall fuzzy controller as follows.
() ()
()
()
{
}
2
3
1
Nut xt t
ϑϑϑ
ββ
β
ϖ
=
=
F
1, 2,...,for
ϑ
=Φ (14)
() ()
()
() ()
()
()
2
3
1
N
N
ut xt jxtxt
ϑϑ ϑη
ββϑη
β
η
=
∈Λ
=−
K
1, 2,...,for
ϑ
=Φ+ Φ+ Φ+Ξ (15)
where
()
()
()
()
()
()
()
()
()
()
()
()
()
()
()
()
()
()
{}
33 33
3
2
33 33
1
NN
N0
NN
xt xt xt xt
xt
xt xt xt xt
ϑϑ ϑϑ
β
β
β
β
ϑ
β
ϑϑ ϑϑ
=
+
=≥
+
,
()
()
2
3
1
N1xt
ϑ
β
β
=
=
,
()
()
3
N
x
t
ϑ
β
and
()
()
3
N
x
t
ϑ
β
denote the upper and lower bound membership
functions presented in Figure 2,
()
()
3
x
t
ϑ
β
and
()
()
3
x
t
ϑ
β
denote the predefined functions.
Figure 2: IT2 membership function of fuzzy controller.
Respectively substituting the IT2 fuzzy formation
and containment controller of (14)-(15) into the IT2T-
SFM (11)-(12), the following closed-loop IT2 fuzzy
model can be obtained.
() ()
()
()
()
()
()
()
{
}
32
33
11
MN
LLL L
L
txtxt t
αβ ααβ
αβ
ϖϖ
==
=⊗+
IABF
(16)
() ()
()
()
()
()
()
()
()
{}
32
33
11
12
MN
FFF
FL
F
xt xt xt
x
txt
αβ
αβ
ααβ αβ
==
=
×⊗+⊗ +⊗
IALBK LBK
(17)
where
() () ()
T
1L
tt t
ϖϖ ϖ
Φ
=
,
() () ()
T
1L
x
txt xt
Φ
=
,
() () ()
T
1F
x
txt xt
Φ+ Φ+Ξ
=
,
L
I and
F
I denote
the identity matrix with the proper dimension,
⊗ is
Kronecker product. For the containment purpose, the
containment error system is constructed as follows
() ()
()
()
1
12 6
FF L
et xt xt
−
=+ ⊗LL I
(18)
where
() () () ()
12F
et e t e t e t
Φ+ Φ+ Φ+Ξ
=
and
() () ()
()
()
N
et j xt xt
ϑϑη
ϑη
η
∈Λ
=−
for
1,...,
ϑ
=Φ+ Φ+Ξ
.
Then, the error dynamic system can be obtained as
follows via the closed-loop system (16)-(17) and (18).
() ()
()
()
()
()
()
()
{}
32
33
11
1
112
MN
FFF
F
L
F
et xt xt
et
αβ
αβ
ααβ α
==
−
=
×⊗+⊗ − ⊗ℜ
IALBK LLA
(19)
Referring to the design method in (Li et al., 2021),
the containment error dynamic system (19) can be
represented with the following form.
() ()
()
()
()
()
() ( )
{}
32
33
11
1
MN
FFF
F
F
FLc
et xt xt
et
αβ
αβ
ααβ α
==
=
×⊗+⊗ +⊗ℜ
IALBK IA
(20)
where
1
Lc
h
ϑ
ϑ
Φ
℘
℘
℘=
ℜ=− ℜ
for
1,...,
ϑ
=Φ+ Φ+Ξ
,
h
ϑ
℘
is the (
,
ϑ
℘
)-th element in the matrix
1
12
−
−LL
which satisfies
0h
ϑ
℘
−≥ and
1
1h
ϑ
Φ
℘
℘=
=
. Then, the
more relaxed IT2 fuzzy controller design process can
be obtained by referring to (Xi et al., 2011) as follows.
For a Laplacian matrix
1
L , the Jordan canonical form
is defined as
-1
1
=ΘΖLΖ
with the non-singular
matrix
Ζ
. And
ϑ
λ
is defined as eigenvalue of matrix
1
L whose number is related to the follower USVs.
Then, the eigenvalues are rearranged with the
relationship
{
}
{
}
{
}
12
Re Re Re
λλ λ
Φ+ Φ+ Φ+Ξ
<<<
where
{
}
R
e
and
{
}
Im
denotes the real and
imaginary part of
.
Lemma 1 (Xi et al., 2011)
Considering the eigenvalue
ϑ
λ
of Laplacian matrix,
the following relation can be obtained.
If
{
}
{
}
123
0Re Im
λλ
Π+ Π+ Π <
for
1, 2,=
3, 4
is satisfied, then
{
}
{
}
123
0Re Im
ϑϑ
λλ
Π+ Π+ Π <
for
1,...,
ϑ
=Φ+ Φ+Ξ
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
x3(t)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Interval Type-2 Fuzzy Control to Solve Containment Problem of Multiple USV with Leader’s Formation Controller
305

is also satisfied, where the eigenvalue
λ
is defined
with
{
}
1,2 1
Re j
λλκ
Φ+
=±
and
{
}
3,4
Re j
λλκ
Φ+Ξ
=±
,
κ
is defined as
{
}
max
ϑ
κλ
=
for
1,...,
ϑ
=Φ+ Φ+Ξ
.
Applying the matrix
Ζ
, the error dynamic system
(20) can be further transferred into the following form.
() ()
()
()
()
()
()
{
}
32
33
11
MN
L
c
et xt xt et
ϑϑϑϑϑ
αβ ααβ α
αβ
==
=+ℵ+ℜ
ABK A
(21)
where
{
}
,diag
ααα
=AAA
,
{
}
,diag
ααα
=BBB
,
()
()
()
()
()
Re e t
et
Im e t
ϑ
ϑ
ϑ
=
,
()
()
Lc
Lc
Lc
Re
Im
ℜ
ℜ=
ℜ
,
{
}
{
}
{} {}
66
66
Re Im
Im Re
ϑϑ
ϑ
ϑϑ
λλ
λλ
−
ℵ=
II
II
. Note that the error
signal
()
et
ϑ
and desired value
L
c
ℜ
are obtained
from
()
()
()
1
d
et et
−
=⊗ZI
and
()
1
L
cdLc
−
ℜ= ⊗ ℜZI
.
Therefore, an IT2 fuzzy formation and
containment controller design method is proposed in
next section with the closed-loop system (16)-(17).
3 IT2 FUZZY FORMATION AND
CONTAINMENT
CONTROLLER DESIGN
Via the IT2 fuzzy controller design with (14)-(15), the
formation and containment purposes can be achieved
with the following theorem.
Theorem 1
If there exist the positive matrices
L
Q ,
F
Q ,
L
α
β
W
,
F
α
β
W
, common symmetric matrices
L
M ,
F
M , the
matrices
L
β
G
,
F
β
T
such that the following sufficient
conditions are satisfied with the given positive scalars
1
iq
αβ
δ
,
1
iq
αβ
δ
,
ε
,
φ
, then the leader USVs can achieve
the stability and complete the formation. Additionally,
the containment is achieved for all follower USVs.
0
LF L F
,, ,
αβ αβ
>QQ W W
(22)
0
LL
αβ αβ
++>ΓW M (23)
()
()
111 1
32
11
0
iq iq iq L iq L L
αβ αβ αβ αβ αβ αβ
αβ
δδδ δ
==
−− + −<
ΓWMM
(24)
0
FF
αβ αβ
++>ΨW M (25)
()
()
111 1
32
11
0
iq iq iq F iq F F
αβ αβ αβ αβ αβ αβ
αβ
δδδ δ
==
−− + −<
ΨWMM
(26)
2
12
0
*
FF
φ
>
QQ
I
(27)
{
}
2
min
φ
(28)
where
TTT
LLL L
α
β
αα
β
α
β
α
=+ ++ΓAQBGQAGB
,
TTT
12
*
FFF FF
ϑϑ
ααβαβα α
αβ
ε
ε
+ℵ + +ℵ +
=
−
AQ BT QA T B Q A
Ψ
I
,
L
L
ββ
=GFQ
,
F
F
ββ
=TKQ
,
1
L
L
−
=QP
,
1
F
F
−
=QP
.
proof
Because the limitation of this paper, the main
derivation related to the contribution of this paper is
provided instead of detailed proof. The stability
analysis process of closed-loop IT2 fuzzy model (16)
is similar to the general control method based on T-
SFM. Moreover, the imperfect premise matching and
related stability analysis have been completely
introduced for IT2T-SFM and fuzzy controller design
method in (Lam, Deters et al., 2013). Referring to
(Lam et al., 2013) and defining the Lyapunov
function of
() ()
()
()
T
11
LL
Vt t t
ϖϖ
= P
, the stability
conditions (22)-(24) can be derived. In Theorem 1,
the parameter
1
iq
αβ
δ
and
1
iq
αβ
δ
are obtained from IT2
membership function such that the more relaxed
stability analysis process than the type-1 fuzzy
control method can be proposed. It is worth notice
that the stability analysis process is only required to
be developed for leader USV 1. And the stability of
all other leader USVs is also ensured because of the
homogenous property. Therefore, the leader USVs
can be controlled to the desired position by properly
setting the desired value of states
ϑ
ℜ
.
However, the redundant item related to
ϑ
ℜ
can
be seen in error dynamic system (19) which causes
the analysis problem in IT2 fuzzy containment
controller design method. To solve the problem, the
stability analysis method can be developed as follows
by referring to (Li et al., 2021). According to the
properties of
1
12
−
−LL , whose element is nonnegative
and individual row sum is equal to 1, the error
dynamic system (19) is transferred into (20). The
detailed information can be referred to (4)-(9) in (Li,
Jabbari et al., 2021). And the system (20) is further
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
306
transferred into the Jordan canonical form (21). Then,
defining Lyapunov function
() ()
()
()
T
FF
Vt et et
ϑϑ
= P
where
{
}
,
F
FF
diag=PPP
and ellipsoid
() ()
()
()
{
}
T
2
:|
F
et et et
ϑϑ ϑ
σ
μ
≤ℑP
, the stability
conditions (25-26) for error dynamic system (21) can
be obtained as follows
() ()
(
)
T
0
FFLcLc
Vt Vt
ε
+−ℜℜ<
(29)
Referring to (Li et al., 2021), one can know that if the
condition (29) is satisfied,
σ
is an attractive invariant
set for (21). And the Problem 1 in (Li et al., 2021) for
the containment purpose is achieved with the effect
of the item related to
L
c
ℜ
. In ellipsoid, the symbol ℑ
is defined for the upper bound for the leader’s
unknown input in (Li et al., 2021). It is worth notice
that no matter the designed desired value
L
c
ℜ
or the
leader control input in this paper is definitely finite
due to the convergence of states. Obviously, if the
sufficient conditions (25)-(26) are satisfied by
Theorem 1, then the stability condition (29) is
satisfied. And the relationship
()
2
et
ϑ
φ
≤Ξℑ
can be
obtained according to the definition of ellipsoid and
condition (27) where
Ξ denote the follower numbers.
Via the minimization with condition (28), the upper
bound from
L
c
ℜ
to
()
et
ϑ
is minimized.
However, the conservative stability conditions
(25)-(28) is also caused due to the minimization of
(28) on a common positive definite condition. To
solve the problem, Lemma 1 is applied to obtain the
more relaxed stability analysis process. Regardless of
the USV’s number, the sufficient conditions (25)-(28)
is only required to be satisfied for four kinds of
eigenvalue.
4 SIMULATION OF FORMATION
AND CONTAINMENT FOR
MULTI-USVS SYSTEM
In the simulation of this section, the IT2 fuzzy
controller design method in Theorem 1 is applied to
simultaneously solve the formation and containment
control problems of multi-USVs system (1)-(6). Thus,
the control gains are obtained as follows by solving
the conditions (22)-(28) with MATLAB.
1
2
0.6703 0.3381 0.0034 2.7782 0.7549 0.0070
0.6315 1.3098 0.5664 1.3769 5.4683 0.6326
0.1243 0.2727 0.3430 0.2710 1.1520 0.2953
0.6719 0.3372 0.0034 2.7848 0.7529 0.0070
0.6297 1.3124 0.5667 1.373
−−−−−
=− −
−−−−
−−−
=− − −
F
F 0 5.4795 0.6335
0.1239 0.2732 0.3431 0.2702 1.1540 0.2955
−
−−
(30)
4
1
4
2
1.5121 0.0185 0.0013 1.7365 0.0213 0.0020
10 0.0006 0.8910 0.0271 0.0008 1.0260 0.0310
0.0188 0.1737 0.0130 0.0216 0.2001 0.0140
1.4753 0.0124 0.0017 1.6942 0.0144 0.0024
10 0.0597 0.8703 0.
−− −−
=×− − − −
−−−−
−− −−
=×− −
K
K 0265 0.0684 1.0021 0.0303
0.0302 0.1702 0.0128 0.0346 0.1960 0.0138
−−
−−
(31)
Then, the state responses of nonlinear multi-USVs
system (1)-(6) are obtained in Figures 3-8 by applying
the IT2 fuzzy controller (14)-(15) with the gains (30)-
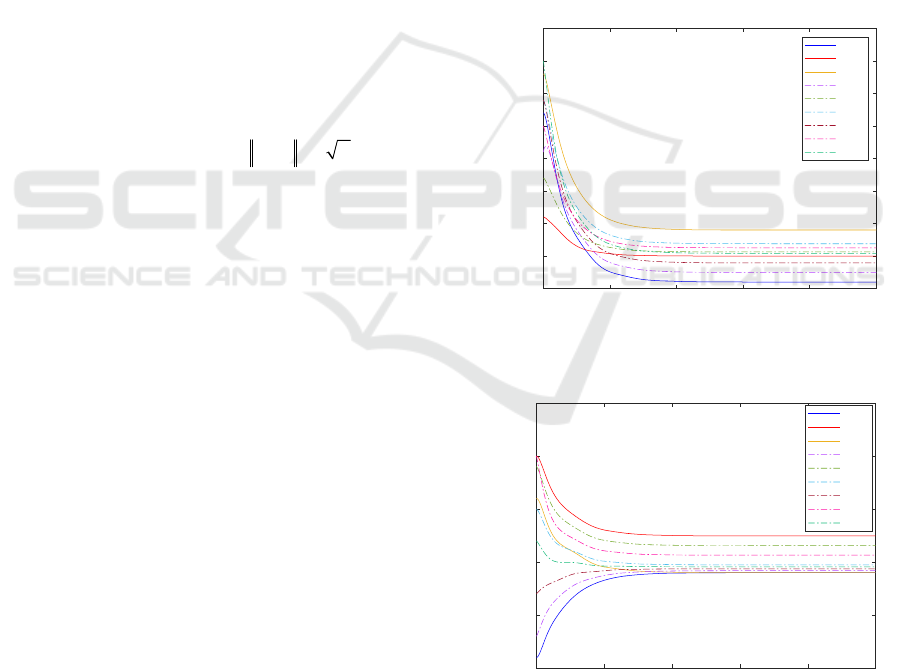
(31).
Figure 3: State
()
1
x
t
ϑ
responses of multi-USVs system.
Figure 4: State
()
2
x
t
ϑ
responses of multi-USVs system.
0 1020304050
time
(
s
)
-5
0
5
10
15
20
25
30
3
5
x
1
(t): X position
LDR1
LDR2
LDR3
FLR4
FLR5
FLR6
FLR7
FLR8
FLR9
0 1020304050
time
(
s
)
-20
-10
0
10
20
30
x
2
(t): Y position
LDR1
LDR2
LDR3
FLR4
FLR5
FLR6
FLR7
FLR8
FLR9
Interval Type-2 Fuzzy Control to Solve Containment Problem of Multiple USV with Leader’s Formation Controller
307
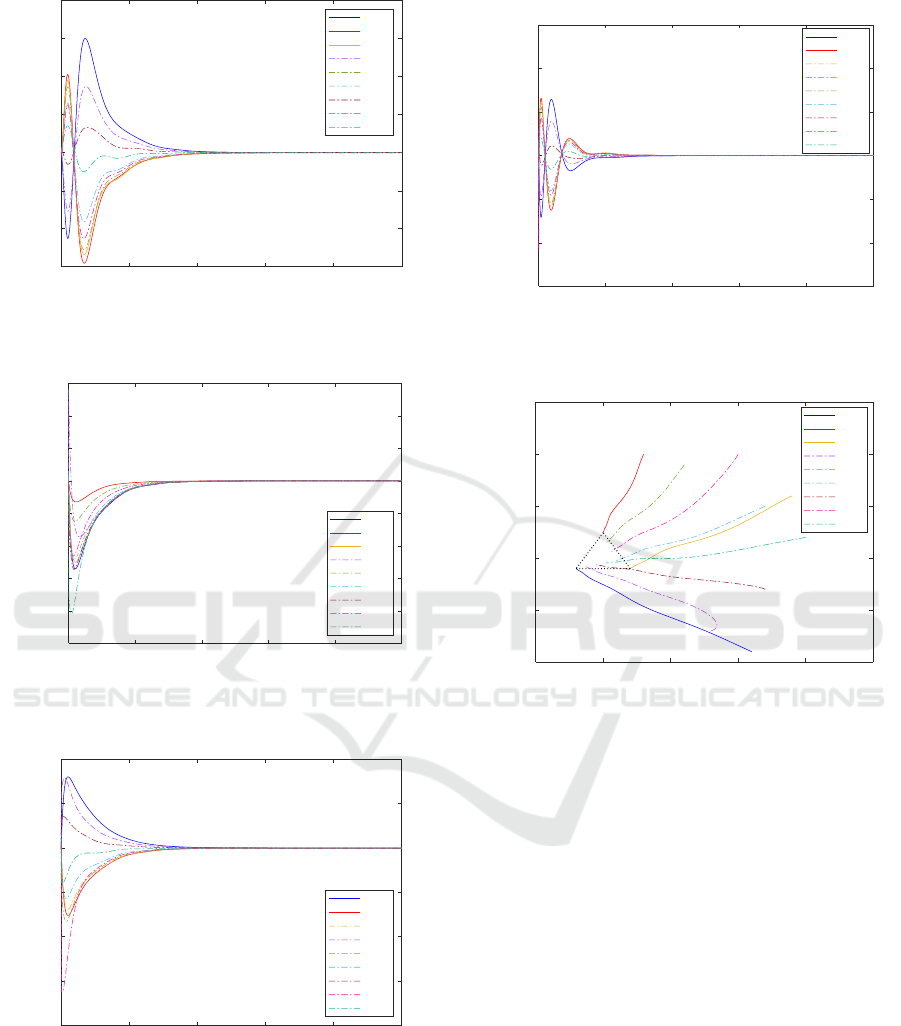
Figure 5: State
()
3
x
t
ϑ
responses of multi-USVs system.
Figure 6: State
()
4
x
t
ϑ
responses of multi-USVs system.
Figure 7: State
()
5
x
t
ϑ
responses of multi-USVs system.
According to the simulation results in Figures 3-4,
it is seen that the X position and Y position of all
leader USVs can achieve the stability and converge to
the desired value. Following the states of leader USVs,
the states of follower USVs simultaneously complete
Figure 8: State
()
6
x
t
ϑ
responses of multi-USVs system.
Figure 9: Trajectories of multi-USVs system.
the containment task such that all the states are forced
into the interval formed by leader USVs. Moreover,
the states of follower USVs can also be forced to zero
if the states of all leader USVs are set to zero value in
Figures 5-8. Based on the results of Figures 3-4, the
trajectories of all the USVs in the nonlinear multi-
USVs system (1)-(6) are also presented in Figure 9. It
is obvious that the triangular region is successfully
formed by three leader USVs via the IT2 fuzzy
formation controller design method in this paper
without the communication between USVs. And all
follower USVs are controlled into the triangular
region. In this simulation, the effect of uncertainties
is considered as
() () ()
14 36
~0.1ttsintΔΔ=
. It is worth
notice that the good formation and containment
control performances can be obtained in Figures 3-8.
And the smooth trajectories of all USVs can be
obtained in Figure 9. Thus, it is said that the IT2 fuzzy
controller design method of Theorem 1 in this paper
is a good choice to simultaneously achieve the
0 1020304050
time
(
s
)
-6
-4
-2
0
2
4
6
8
x
3
(t): yaw angle
LDR1
LDR2
LDR3
FLR4
FLR5
FLR6
FLR7
FLR8
FLR9
0 1020304050
time
(
s
)
-10
-8
-6
-4
-2
0
2
4
6
x
4
(t): surge
LDR1
LDR2
LDR3
FLR4
FLR5
FLR6
FLR7
FLR8
FLR9
0 1020304050
time
(
s
)
-8
-6
-4
-2
0
2
4
x
5
(t): sway
LDR1
LDR2
LDR3
FLR4
FLR5
FLR6
FLR7
FLR8
FLR9
0 1020304050
time
(
s
)
-15
-10
-5
0
5
10
1
5
x
6
(t): yaw angular velocity
LDR1
LDR2
LDR3
FLR4
FLR5
FLR6
FLR7
FLR8
FLR9
-10 0 10 20 30 40
X Positio
n
-20
-10
0
10
20
30
Y position
LDR1
LDR2
LDR3
FLR4
FLR5
FLR6
FLR7
FLR8
FLR9
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
308

formation and containment purposes for a nonlinear
multi-USVs system with uncertain problem.
5 CONCLUSIONS
In this paper, an IT2 fuzzy formation and containment
controller design method is developed for the multi-
USVs system based on the IT2T-SFM. Using the
imperfect premise matching method, the IT2 fuzzy
formation and containment controller can be designed
with the different IT2 membership function from the
model. The design concept for leader’s unknown
input is successfully extended to solve the analysis
problem. And the analysis method according to the
Jordan canonical form of Laplacian matrix is applied
to obtain a more relax IT2 fuzzy controller design
process. From the simulation results, the smooth
responses to achieve the formation and containment
purposes can be obtained even under the effect of
uncertainties.
ACKNOWLEDGEMENTS
This work was supported by the National Science and
Technology Council of the Republic of China under
Contract NSTC 112-2221-E-019-057.
REFERENCES
Yan, R. J., Pang, S., Sun, H. B., & Pang, Y. J. (2010).
Development and missions of unmanned surface
vehicle. Journal of Marine Science and Application, 9,
451-457.
Ucgun, H., Okten, I., Yuzgec, U., & Kesler, M. (2022). Test
platform and graphical user interface design for vertical
take-off and landing drones. Romanian Journal of
Information Science and Technology, 25(3–4), 350-367.
Manley, J. E. (2008, September). Unmanned surface
vehicles, 15 years of development. In OCEANS 2008
(pp. 1-4). IEEE.
Fossen, T. I. (1999). Guidance and Control of Ocean
Vehicles, Wiley. New York, USA.
Gonzalez-Garcia, A., & Castañeda, H. (2021). Guidance
and control based on adaptive sliding mode strategy for
a USV subject to uncertainties. IEEE Journal of
Oceanic Engineering, 46(4), 1144-1154.
Jiang, Z., Yang, T., Zhou, L., Yuan, Y., & Feng, H. (2019).
Maritime search and rescue networking based on multi-
agent cooperative communication. Journal of
Communications and Information Networks, 4(1), 42-
53.
Jadbabaie, A., Lin, J., & Morse, A. S. (2003). Coordination
of groups of mobile autonomous agents using nearest
neighbor rules. IEEE Transactions on automatic
control, 48(6), 988-1001.
Ji, M., Ferrari-Trecate, G., Egerstedt, M., & Buffa, A.
(2008). Containment control in mobile networks. IEEE
Transactions on Automatic Control, 53(8), 1972-1975.
Zhou, W., Wang, Y., Ahn, C. K., Cheng, J., & Chen, C.
(2020). Adaptive fuzzy backstepping-based formation
control of unmanned surface vehicles with unknown
model nonlinearity and actuator saturation. IEEE
Transactions on Vehicular Technology, 69(12), 14749-
14764.
Wu, W., & Tong, S. (2022). Fixed-time adaptive fuzzy
containment dynamic surface control for nonlinear
multiagent systems. IEEE Transactions on Fuzzy
Systems, 30(12), 5237-5248.
Wang, H. O., Tanaka, K., & Griffin, M. F. (1996). An
approach to fuzzy control of nonlinear systems:
Stability and design issues. IEEE Transactions on
Fuzzy Systems, 4(1), 14-23.
Precup, R. E., Tomescu, M. L., Preitl, S., Petriu, E. M.,
Fodor, J., & Pozna, C. (2013). Stability analysis and
design of a class of MIMO fuzzy control systems.
Journal of Intelligent & Fuzzy Systems, 25(1), 145-155.
Chang, W. J., & Hsu, F. L. (2016). Sliding mode fuzzy
control for Takagi–Sugeno fuzzy systems with bilinear
consequent part subject to multiple constraints.
Information Sciences, 327, 258-271.
Chang, W. J., Lin, Y. H., Du, J., & Chang, C. M. (2019).
Fuzzy control with pole assignment and variance
constraints for continuous-time perturbed Takagi-
Sugeno fuzzy models: Application to ship steering
systems. International Journal of Control, Automation
and Systems, 17, 2677-2692.
Bojan-Dragos, C. A., Precup, R. E., Preitl, S., Roman, R.
C., Hedrea, E. L., & Szedlak-Stinean, A. I. (2021).
GWO-based optimal tuning of type-1 and type-2 fuzzy
controllers for electromagnetic actuated clutch systems.
IFAC-PapersOnLine, 54(4), 189-194.
Lam, H. K., Li, H., Deters, C., Secco, E. L., Wurdemann,
H. A., & Althoefer, K. (2013). Control design for
interval type-2 fuzzy systems under imperfect premise
matching. IEEE Transactions on Industrial Electronics
,
61(2), 956-968.
Lin, Y. H., Chang, W. J., & Ku, C. C. (2022). Solving the
Formation and Containment Control Problem of
Nonlinear Multi-Boiler Systems Based on Interval
Type-2 Takagi–Sugeno Fuzzy Models. Processes,
10(6), 1216.
Li, P., Jabbari, F., & Sun, X. M. (2021). Containment
control of multi-agent systems with input saturation and
unknown leader inputs. Automatica, 130, 109677.
Xi, J., Shi, Z., & Zhong, Y. (2011). Consensus analysis and
design for high-order linear swarm systems with time-
varying delays. Physica A: Statistical Mechanics and
its Applications, 390(23-24), 4114-4123.
Fossen, T. I., & Grovlen, A. (1998). Nonlinear output
feedback control of dynamically positioned ships using
Interval Type-2 Fuzzy Control to Solve Containment Problem of Multiple USV with Leader’s Formation Controller
309

vectorial observer backstepping. IEEE Transactions on
Control Systems Technology, 6(1), 121-128.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
310
