
Multiple Additive Neural Networks: A Novel Approach to Continuous
Learning in Regression and Classification
Janis Mohr
a
, Basile Tousside
b
, Marco Schmidt
c
and J
¨
org Frochte
d
Interdisciplinary Institute for Applied Artificial Intelligence and Data Science Ruhr, Bochum University of Applied
Sciences, 42579 Heiligenhaus, Germany
Keywords:
Gradient Boosting, Machine Learning, Continuous Learning, Neural Networks, Overfitting.
Abstract:
Gradient Boosting is one of the leading techniques for the regression and classification of structured data.
Recent adaptations and implementations use decision trees as base learners. In this work, a new method based
on the original approach of Gradient Boosting was adapted to nearly shallow neural networks as base learners.
The proposed method supports a new architecture-based approach for continuous learning and utilises strong
heuristics against overfitting. Therefore, the method that we call Multiple Additive Neural Networks (MANN)
is robust and achieves high accuracy. As shown by our experiments, MANN obtains more accurate predictions
on well-known datasets than Extreme Gradient Boosting (XGB), while also being less prone to overfitting and
less dependent on the selection of the hyperparameters learn rate and iterations.
1 INTRODUCTION
Boosting is a technique that combines weak learn-
ers to achieve a highly accurate model. Every sin-
gle learner only needs to be moderately accurate
(Shapire, 1990).
Gradient Boosting is a proposed boosting tech-
nique that has had great success on data sets with
structured data (Friedman, 1999b; Viola and Jones,
2001). Most published papers use different imple-
mentations of decision trees as base learners (Chen
and Guestrin, 2016; Dorogush et al., 2018). The
gradient of a previous learner is used for fitting the
next learner in Gradient Boosting. Gradient Boost-
ing can achieve very accurate predictors and is less
prone to overfitting than other boosting techniques,
but still easily overfits on some datasets if several
hundred learners are combined (Bikmukhametov and
Jaeschke, 2019). The MANN algorithm is an adap-
tation and enhancement of the gradient boosting al-
gorithm with nearly shallow neural networks as base
learners. Several heuristics and techniques are used
to prevent overfitting. Thus, MANN can reach better
accuracy than popular implementations of Gradient
a
https://orcid.org/0000-0001-6450-074X
b
https://orcid.org/0000-0002-9332-5060
c
https://orcid.org/0000-0002-7232-5256
d
https://orcid.org/0000-0002-5908-5649
Boosting which are based on weak learners like de-
cision trees. We especially emphasise developing an
algorithm that is easy to use and supports continuous
learning rather than being mainly focused on accu-
racy. Our approach focuses on using neural networks
with a minimum of hidden layers and neurons. We
present techniques to automatically stop the training
of new neural networks if accuracy is not significantly
improved.
Some papers have already considered the possi-
bility of using boosting techniques with neural net-
works. (Schwenk and Bengio, 2000) used neural
networks in combination with the Adaptive Boosting
(AdaBoost) method and came to the conclusion that
it works as well and sometimes even better than Ad-
aBoost with decision trees. Our experiments rely on
the newer, more general, and (in effective implemen-
tations) better-performing Gradient Boosting. The re-
sults confirm the good quality of predictions of boost-
ing with neural networks. Additionally, advanced
heuristics were added and the algorithm was designed
to be easy to use and reduce hyperparameter tuning.
(Martinez-Munoz, 2019) proposes to train the
neurons of a single neural network with one hidden
layer sequentially in a boosting approach. (Shalev-
Shwartz, 2014) proposed the SelfieBoost algorithm
that uses Stochastic Gradient Descent as a weak
learner for boosting a single neural network.
A recently followed path of research is the com-
540
Mohr, J., Tousside, B., Schmidt, M. and Frochte, J.
Multiple Additive Neural Networks: A Novel Approach to Continuous Learning in Regression and Classification.
DOI: 10.5220/0012234000003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 540-547
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

bination of trees and neural networks. Papers in this
domain use tree-like structures with neural networks.
Adaptive Neural Trees (Tanno et al., 2018) adaptively
grow tree-like structures with neural networks. (De-
boleena et al., 2018) proposes to build a hierarchical
model out of several neural networks in a tree-wise
manner which can grow to learn new data. MANN
differs from these approaches because it is based on
an algorithm commonly used with decision trees but
does not try to put neural networks into tree-like struc-
tures.
This paper will enhance the related work regard-
ing overfitting and adaptivity, showing how to use
Gradient Boosting with neural networks and that it
achieves even better predictions than popular boost-
ing algorithms. Our approach to achieving highly ac-
curate predictors was extended with continuous learn-
ing, which furthermore separates our algorithm from
plain implementations of Gradient Boosting. Several
real-life use-cases of machine learning benefit from
continuous learning (Kaeding et al., 2017). New data
is generated over time and while an already trained
model is in use. MANN is eminently suitable in
these cases to continuously train a model and im-
prove its accuracy on new data. Our algorithm al-
lows two different approaches to support continuous
learning, altering the neural networks of an already
existing model and calculating residuals with the al-
ready trained model to fit a new model and create a
combined model. Special attention was given to over-
fitting as a general problem in machine learning. An
implementation of a heuristic that works to prevent
overfitting when using Gradient Boosting with neural
networks is proposed and it is shown that MANN is
less prone to overfitting and easier to use because of
less hyper-parameter tuning than other popular boost-
ing techniques.
Our specific contributions in this paper are sum-
marised below:
1. We propose a novel method that incrementally
builds deep neural networks out of several neural
networks using the Gradient Boosting algorithm.
This method is versatile and can easily be adapted
for a wide range of tasks and domains while being
easier to train and fine-tune than traditional deep
neural networks.
2. We develop heuristics against overfitting based on
early stopping for this method and propose an
architecture-based approach for continuous learn-
ing.
3. We demonstrate the usefulness of the developed
heuristics and the approach for continuous learn-
ing. Furthermore, we show superior results on
several regression and classification datasets.
2 AN APPROACH FOR ADDITIVE
NEURAL NETWORKS
The accuracy of a predictive model can often be in-
creased by averaging the decisions of an ensemble of
predicitve models. When the individual predictors are
accurate and diverse, significant improvement can be
expected. A general idea to use this is to have a base
learner and apply it on different training sets for sev-
eral times.
Gradient Boosting is a boosting algorithm. It se-
quentially trains predictors to construct an additive
model. The gradient of the loss function is used to
train the predictor on the next iteration. All fitted pre-
dictors have the same influence on the final model,
only weighted by a learning rate that is equal for all
predictors. Gradient Boosting as proposed by (Fried-
man, 1999a) is a two-step optimisation method.
A system of output (target) variables y and input
variables (features) x can be formed into a dataset
D = {y
i
, x
i
}. The goal for our algorithm is then to
model a function F
∗
(x) on the dataset D of known
(y, x)-values. The function F
∗
(x) maps x to y in a
way that the value of a specified differentiable loss
function L(y
j
, F(x)) is minimised. The index j is the
ongoing number of the iteration I
j
.
The algorithm starts with an initial guess F
0
(x),
which is a constant value. This initial guess is used
as a starting point for the model. At this point, the
model would predict F
0
(x) for every value of x. In the
second step, the (pseudo-)residuals are computed as:
r
i, j
= −[
∂L(y
i
, F(x
i
))
∂F(x
i
)
]
F(x)=F
j−1
(x)
(1)
The term (pseudo-)residuals is used because their na-
ture depends on the loss function. For example the
loss function residual sum of squares L(y
j
, F(x)) =
1
2
· (y
j
− F(x))
2
which is mostly used for regression
leads to real residuals (Friedman, 1999a). The base
learner is then fit to the (r
i
, x
i
)-values. Next, the out-
put values γ
j
of the fitted base learner for the whole
dataset are computed with γ being the predicted value
for the current residuum.
γ
j
= argmin
γ
∑
x
i
∈R
i, j
L(y
i
, F
j−1
(x
i
) + γ) (2)
Finally, the predictions F
j
(x) of the model at the cur-
rent iteration I
j
are computed. The predictions of the
previous iteration are summed up with the predictions
of the current iteration and are multiplied by a learn-
ing rate ν as proposed by (Friedman, 1999a). The
learn rate assures that every base learner’s influence
in the final model is limited. This limitation reduces
Multiple Additive Neural Networks: A Novel Approach to Continuous Learning in Regression and Classification
541

1: Input: data x
i
, y
i
; Loss function L(y
i
, F(x))
2: Initialise F
0
(x) = argmin
γ
∑
n
i=1
L(y
i
, γ).
3: repeat
4: r
i, j
= −[
∂L(y
i
,F(x
i
))
∂F(x
i
)
]
F(x)=F
j−1
(x)
5: Fit a neural network to r
i, j
6: Early stopping.
7: for j = 1, ..., J
j
do
8: γ
j
= argmin
γ
∑
x
i
∈R
i, j
L(y
i
, F
j−1
(x
i
) + γ)
9: end for
10: F
j
(x) = F
j−1
(x) + ν
∑
J
j
j=1
γ
j
11: Heuristic to prevent overfitting.
12: j = j + 1
13: until j = J
Algorithm 1: Multiple Additive Neural Networks.
the impact of a non-optimal iteration.
F
j
(x) = F
j−1
(x) + ν
J
∑
j=1
γ
j
(3)
The process of computing the residuals, fitting the
base learner, and updating the predictions is done se-
quentially for a given number of iterations J. After
reaching J iterations the model is considered com-
plete and trained. This trained model is called M and
is ready to be used for predictions.
This description of Gradient Boosting is abstract
and not restricted to one specific type of base learner
or loss function. Most implementations use decision
trees as base learners. MANN uses neural networks
as base learners. The networks can be used for re-
gression and classification tasks. The main idea be-
hind using artificial neural networks is that Gradient
Boosting might be able to accomplish better accuracy
with stronger base learners while allowing continuous
learning by directly retraining the neural networks.
The established theory of gradient boosting is
used to present a new approach for neural networks
offering the previously described advantages. Not
quite so deep (no more than three hidden layers) neu-
ral networks are used and therefore gradient boosted
neural networks for both regression and classifica-
tion are the core of MANN. The efficiency of neu-
ral networks depends on choosing reasonable hyper-
parameters for their structure and training. The arti-
ficial neural networks are kept as small and shallow
as possible. The number of neurons on every layer
can be adapted. To predict complex functions, higher
numbers of neurons are necessary. On every itera-
tion I
j
in the algorithm, the (pseudo-)residuals are
calculated. A neural network NN
j
is fitted on these
(pseudo-)residuals. The neural network then predicts
the original unaltered training dataset D. These pre-
dictions are used to calculate the (pseudo-)residuals
on which a neural network is fitted in the next itera-
tion. The number of epochs that a single neural net-
work is trained in is automatically regulated with an
implementation of early stopping. The progress the
neural network makes on the training dataset is eval-
uated after every epoch. If the accuracy of the neural
network does not increase further for a given amount
of epochs the training is stopped prematurely.
2.1 Heuristic to Prevent Overfitting
1: Let T be the training set and V the validation set.
2: Every time training of a neural network NN
i
is
finished:
3: if E
va
(NN
i
) ≥ E
va
(NN
i−1
)or ≤ E
t
then
4: break
5: end if
Algorithm 2: Heuristic to prevent overfitting.
Preventing Overfitting is a central and important part
of every algorithm that fits neural networks on data.
Our heuristic takes action after operation 10 on
line 10 in algorithm 1. The heuristic is used on ev-
ery iteration of our algorithm. An amount of data is
removed from the training dataset T and used as the
validation dataset V . The validation dataset remains
unaltered during the algorithm and is used on every
iteration. Tests on several datasets have shown that
taking five percent of the test data as validation data
delivers good results. Algorithm 2 shows the used
heuristics schematically.
On the current iteration I a model M
1
is built up
out of the initial value F
0
and the already fitted neural
networks NN
j
. This temporary model represents the
current state of the training and how the model would
perform if the fitting of new neural networks would
be stopped now.
M
1
is now fed with the x values of the validation
dataset to make predictions on it. The predictions are
evaluated and an error E
va
is calculated. This error is
compared to a threshold E
t
. If it is below this thresh-
old the model predicts as well as wanted and the fit-
ting of new neural networks is stopped. Otherwise,
the training continues. Over n steps the accuracy of
predictions is evaluated. If the accuracy is steady or
decreases, the fitting of additional neural networks is
also stopped because no improvements are to be ex-
pected. During experiments, it seemed reasonable to
choose n = 3.
Our heuristics securely prevent overfitting and fur-
thermore reduce the time needed for computation.
The fitting of additional neural networks is stopped
when no improvement is to be expected. Therefore,
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
542

the algorithm is user-friendly and easy to use. Over-
fitting is automatically avoided without any parame-
ter tuning. Our algorithm also automatically avoids
waste of time and energy from fitting neural networks
that do not improve the accuracy of the model further.
In the same mind, an early stopping (Raskutti
et al., 2013) was added on the level where the neural
networks are trained (algorithm 1 operation 5). For
every evaluation, the same evaluation dataset is used.
The performance of the single neural networks is con-
stantly evaluated every epoch. If no progress is made
for a number of steps the training of this neural net-
work is stopped because it is not expected to achieve
better performance.
The proposed algorithm prevents overfitting and
training without any positive effect on the perfor-
mance of the model on two levels. Every neural net-
work is accurately monitored and trained in the opti-
mal amount of epochs. Additionally, the whole model
is evaluated at every iteration to keep it as small as
possible and make it less prone to overfitting.
2.2 Architecture-Based Approach to
Continuous Learning
1: Let T
1
and T
2
be two datasets with the same num-
ber of features and the same target value.
2: Model M
1
trained on T
1
as described in Algo-
rithm 1.
3: if E(M
1
(T
1
)) − E(M
1
(T
2
)) ≥ ε then
4: break
5: else
6: Retrain Model M
1
on the new training data T
2
.
7: if |E(M
1
(T
1
)) − E(M
1
(T
2
))| ≥ ε then
8: break
9: else
10: Algorithm 1 with T
2
to build Model M
2
.
11: Combine M
1
and M
2
to create final Model
M
3
.
12: end if
13: end if
Algorithm 3: Continuous Learning with MANN.
Humans have the ability to acquire and transfer
knowledge throughout their life. This is called life-
long learning. Continuous learning is an adaption of
this mechanic (Kaeding et al., 2017). In this paper,
continuous learning is considered to be a technique
that allows a complete model to be able to predict a
new dataset with the same features. Therefore, it must
be retrained or expanded. An algorithm that supports
both the time-efficient retraining and the expansion
of the model was developed. This technique is only
suitable for continuous learning with a dataset with
the same classes as the original dataset otherwise it
would be necessary to alter at least the last layer of
the neural networks. The algorithm is not only supe-
rior in terms of accuracy as the experiments show but
it also supports continuous learning on two levels.
A model M
1
is trained on a dataset T
1
. This model
reaches a certain quality of its predictions until the
training is stopped. A second dataset T
2
exists with
new data but the same set of features and targets as the
first dataset. For example, this could be data that was
gathered after the training on the original data was
finished. It would be possible to train a new model
on a dataset constructed out of both datasets. But it is
much more feasible to use the already fitted model to
reduce the amount of time needed for training a new
model from scratch, especially on very large datasets.
It will require some retraining.
First, the algorithm checks if new training is re-
quired. The already trained model is fed with the new
data and the predictions of the model are evaluated
by comparing the error E of the prediction of T
1
with
the error E of the prediction of T
2
. If the results in a
specific metric are close to the original dataset, appar-
ently retraining is not necessary. It is very likely that
better results will not be achieved. The two datasets
seem to be quite similar.
|E(M
1
(T
1
)) − E(M
1
(T
2
))| ≥ ε (4)
Given the case that there is a difference in the
accuracy of predictions, the new dataset is used for
training. At first, the already existing neural networks
in the model are retrained on the new dataset. There-
fore, the weights are adapted to fit the new data bet-
ter. After this assimilation, the new dataset is again
predicted with the model. If the performance is simi-
lar to the original one there is no need to continue the
training. Equation (4) is again used for the rating of
the performance. E can be an arbitrary error metric
for example mean-square-error. If there is still a sig-
nificant difference the model is extended. Algorithm
1 is used again but with the new dataset. Generally
speaking, new neural networks that are fitted to the
new dataset are added to the already existing model
M
1
.
The algorithm starts off with the initial guess
F
0
(x). When not training continuously the target val-
ues y
i
are used for initialisation. Taking advantage
of already having a model, the loss of Model M
1
on
training data T
2
is used as the initial value. There-
fore, model M
1
is used to start the fitting of new neu-
ral networks. From this point on, model M
2
is built
with neural networks that are fit to the data for a given
amount of iterations I. The final model is M
3
and is
then used for predictions. Continuous learning can be
repeated as new training data becomes available. This
Multiple Additive Neural Networks: A Novel Approach to Continuous Learning in Regression and Classification
543

approach to continuous learning is especially suitable
for regression tasks. The complete process of contin-
uous learning as pseudo-code is given in Algorithm
3.
3 EXPERIMENTS
In the following section, different experiments are de-
scribed. The experiments show the accuracy of the
proposed method and how it works including demon-
strations of the effectiveness of the heuristics against
overfitting. An academic implementation of MANN
is used for the experiments. The loss function
L(y
j
, F(x)) =
1
2
· (y
j
− F(x))
2
is used for regression
tasks and the loss function L(y
j
, p) = y
i
· log(p) +
(1 − y
i
) · log(1 − p), with the predicted probability
p, is used for classification. The implemented arti-
ficial neural networks have three hidden layers with
8 neurons each. We decided to use this fixed set of
layers and neurons to reduce the variation of parame-
ters during the following experiments. This strongly
enhances the validity of the experiments and aligns
the number of hyperparameters that are available
throughout the compared learners. Extensive repeti-
tions of the experiments were done to ensure that the
parameters are chosen in a way that the neural net-
works achieve good performance. XGB is used to
compare and evaluate the performance. The freely
available implementation of XGB was used. In the re-
gression experiments, a multi-layer perceptron (MLP)
with 5 layers was used as an example of the perfor-
mance of deep neural networks without any boosting.
3.1 Results on Regression Benchmarks
The following sections contain a study on the perfor-
mance on several regression benchmarks to show off
the accuracy of MANN compared to other popular
methods.
3.1.1 Results on the Bike Sharing Dataset
In this experiment, a dataset known as the Bike Shar-
ing dataset is used. It is a popular dataset that was re-
leased in 2013 and since then used to test algorithms
and for educational purposes (Fanaee-T and Gama,
2014).
Data for every rented bike is logged. The informa-
tion consists out of duration, start date, end date, start
station, end station, bike number, and member type.
This data is enhanced with general information about
the environment like weather, humidity, temperature,
wind speed, and weekday. The dataset has data for
every hour for two years which leads to 17,379 rows
of data. Each with 15 features.
First, training is started on the whole dataset. Data
augmentation or elimination of outliers was not done.
The unaltered dataset is used for our experiment to
have a good comparison to the accuracy of XGB on
the same dataset. A parameter grid search was used
to find the best combination of learn rate and itera-
tions with a maximum of 500 epochs. Stochastic gra-
dient descent was used as optimiser and the fitting
of new networks was halted when the mean-absolute
error on the validation dataset falls below 1. The
learning rate was set to 0.3. With these parameters,
an RMSE of 56 was achieved in predicting the test
data. The data from the last days of every month,
starting with the 20th was used as test data to have
a use case that is close to real life. For comparison,
a XGB model is trained on the same dataset with a
learning rate of 0.2 and a maximum tree depth of 6.
This XGB model acquired an RMSE of 62 on the test
data. These results lead to two insights. Firstly XGB
overfits the dataset with reasonably picked parameters
while MANN does not. Secondly, the accuracy of the
prediction is better with MANN.
The aforementioned parameters for both methods
were chosen with a parameter grid search and are the
parameters that had the best results. Figure 1 is a
plot of the RMSE over the iterations and learn rate
for MANN and XGB.
MANN has a peak for a combination of a small
learn rate and few iterations. This suggests avoiding
choosing small learn rates and few iterations, which
is consistent. XGB shows overfitting on this dataset
strongly depending on the learn rate. With a higher
learn rate the overfitting increases. This experiment
demonstrates that the heuristic proposed in section
2.1 is working. To furthermore prove the claim that
the proposed heuristics work, MANN was used to
train a model on the bike-sharing dataset with and
without the heuristic. The accuracy on the training
data increases progressively for the model without the
heuristics and decreases on the test data. The other
model keeps improving until no more improvement
can be made and then stops.
3.1.2 Million Song Dataset & CT Scan Slize
Localization Dataset
The CT Scan Slize Localization Dataset is a dataset
with medicinal data proposed by (Graf et al., 2011). It
consists of 384 features extracted from a set of 53500
CT images from 74 different patients (43 male, 31 fe-
male). The final feature vector is a concatenation of
two histograms, one about the location of bone struc-
tures and one about air inclusions. The target values
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
544
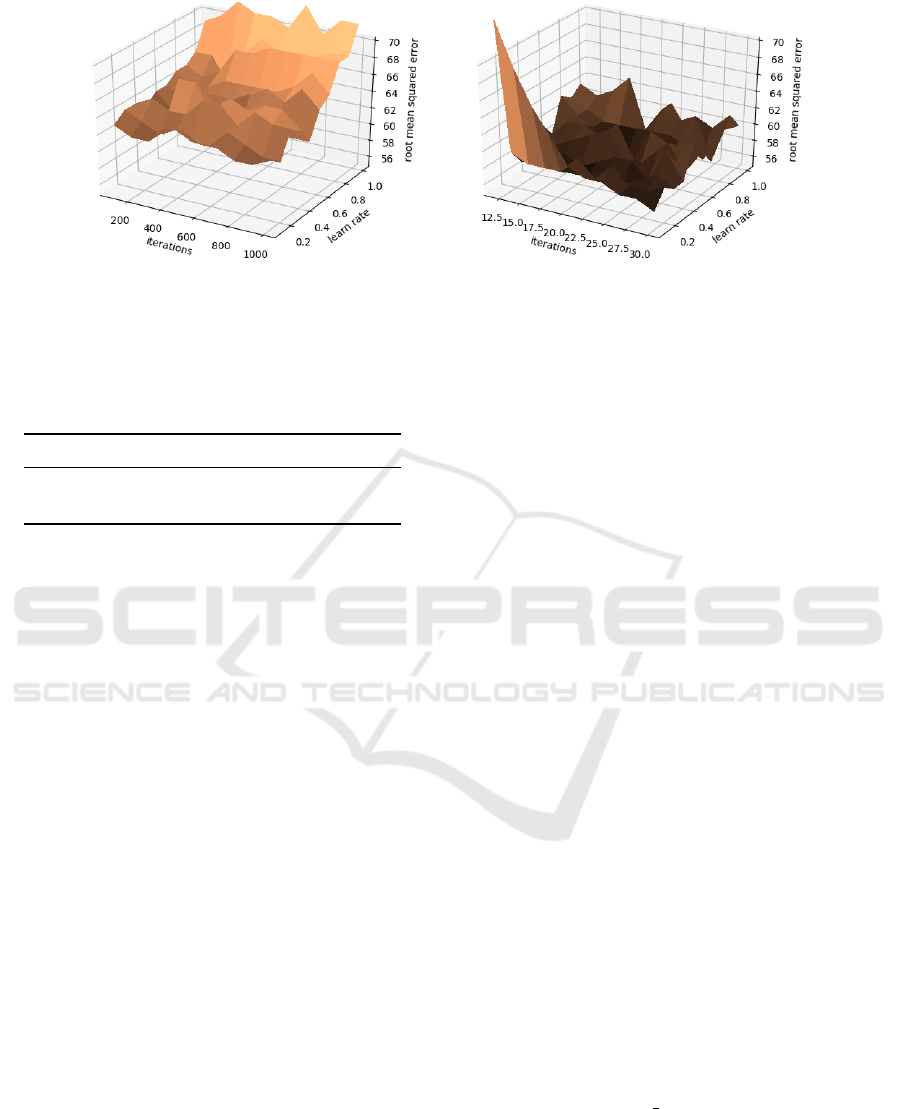
Figure 1: RMSE plotted depending on the number of iterations and learn rate training the bike sharing dataset with XGB (left)
and MANN (right). This plot represents the parameter grid search that was used to find the parameters for MANN and XGB
that lead to the best accuracy. The root mean squared error is used as a metric. Furthermore, this plot shows that MANN is
less dependent on its parameters then XGB.
Table 1: Regression Datasets (CT Scan and MSD in
RMSE).
Dataset MANN XGB ANT MLP
CT Scan 5.34 6.67 - 8.49
MSD 8.57 9.38 - 12.73
are in a range from 0 to 180.
The Million Song Dataset (MSD) is a set of fea-
tures for songs from 1922 to 2011 published by
(Bertin-Mahieux et al., 2011). Predicting a track’s
year of origin based only on audio features and with-
out any metadata is the task. The split into test
and training data recommended by the authors of the
dataset is used to avoid having artists appear in both
training and test data. The data per year is highly non-
uniformly distributed. All results can be seen in table
1.
3.2 Results on Binary Classification
Datasets
As described in Section 2 MANN does not only sup-
port regression but also classification tasks. Three bi-
nary classification datasets were selected to present a
variety of complexity and dataset sizes and the accu-
racy of MANN, XGB, and ANT are compared. Re-
sults can be seen in table 2.
3.2.1 UCI Heart Disease & Rain in Australia
Dataset
The UCI heart disease dataset was published by (De-
trano et al., 1989). This dataset consists out of 4
subsets from different hospitals with data on patients
with and without heart disease. The goal is to predict
whether a patient has heart disease and if so, which
type. It has 14 features and 303 instances that rep-
resent medical data about patients and it reduces the
task to find out if a patient has heart disease or not.
While some papers (Dangare and Apte, 2012;
Zriqat et al., 2016) reach an accuracy of nearly 100
percent on this dataset with the use of heavy data
augmentation most papers (Chen et al., 2011; Sabar-
inathan and Sugumaran, 2014; Sabay et al., 2018)
reach an accuracy of around 85 percent without any
data augmentation. No data augmentation was used
in this experiment for better comparability.
A learning rate of 0.6 and 18 neural networks were
used. Every neural network was trained in a maxi-
mum of 400 epochs.
With these parameters, MANN reaches an accu-
racy of 90 percent and XGB of 85 percent. MANN is
more accurate than XGB and is also slightly above
what most published papers (Aljanabi et al., 2018)
accomplish on this dataset showing that MANN
works well on very small datasets.
The rain in Australia dataset contains daily
weather information from different locations all over
Australia. The target is to predict whether it is go-
ing to rain the next day. The dataset consists of 23
features in 142,193 rows. Data was collected from
different weather stations in Australia over a time of
10 years. The data origins from the Bureau of Meteo-
rology of the Australian government. Predicting rain-
fall is of immense interest because it can be an early
warning sign for natural disasters and is important for
agriculture (Parmar et al., 2017).
The feature RISK MM was excluded from the
training dataset. It is the amount of rainfall that oc-
curred on the next day and was used as a source to
ascertain the value for the target variable. Several fea-
tures are categorical, for example, the wind direction.
Label Encoding was used to deal with all categorical
Multiple Additive Neural Networks: A Novel Approach to Continuous Learning in Regression and Classification
545
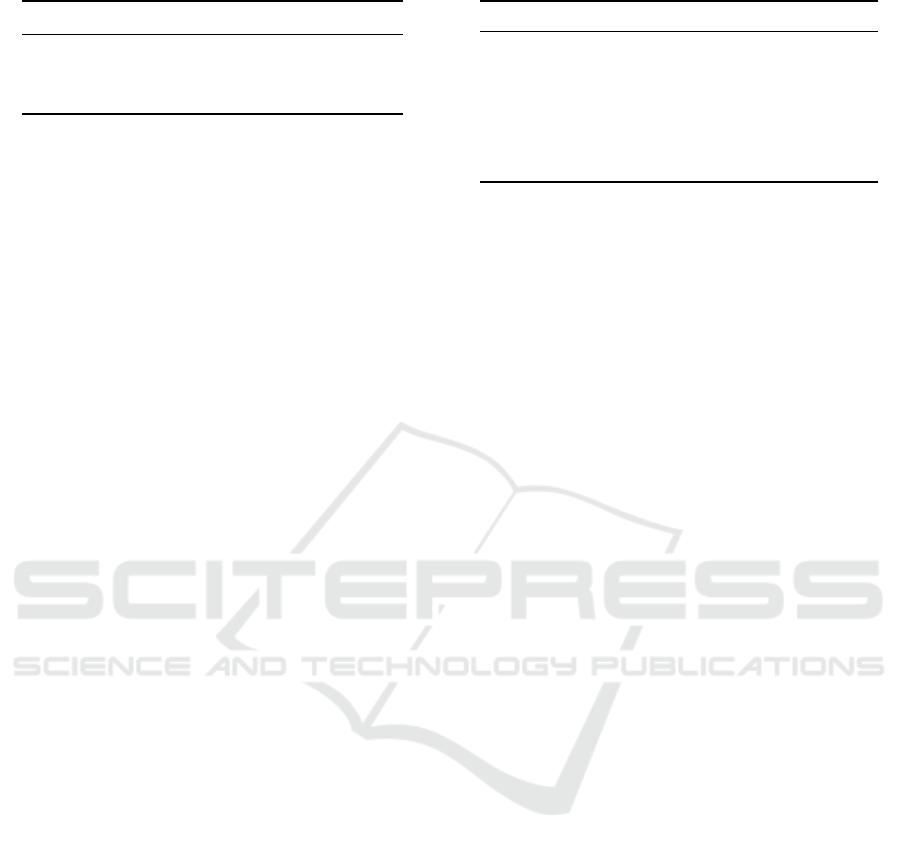
Table 2: Binary Classification Datasets Accuracy.
Dataset MANN XGB ANT
UCI heart disease 0.90 0.85 0.88
Rain in Australia 0.89 0.87 0.89
Higgs Boson 0.85 0.83 0.82
features present in the Rain in Australia dataset.
The best results were found with a parameter grid
search with a learn rate M
ν
= {ν ∈ N|2 ≤ ν ≤ 20∧ν =
2 × k} for both learners. 600 iterations were used for
XGB and 18 for MANN. The development of the ac-
curacy is steady for XGB with one peak and a mean of
85.04 percent accuracy. The best accuracy for XGB is
87 percent with a learn rate of 0.4 and 600 iterations.
MANN reaches a better accuracy of 89 percent with a
learn rate of 0.5 and 18 iterations. It has a mean accu-
racy of 84.87 percent. With an accuracy of 89 percent
ANT is as good as MANN on this task.
3.2.2 Higgs Boson Dataset
The Higgs Boson dataset is a classification problem
to distinguish between a signal process that produces
Higgs bosons and a process that does not produce
Higgs Bosons. Monte Carlo simulations were used to
create the data. The features in this dataset represent
kinematic properties and some derived functions, usu-
ally used by physicists. The full dataset consists out of
1 million entries. (Baldi et al., 2014) This dataset was
used to evaluate the accuracy of MANN on a big and
imbalanced (there are many more data for not produc-
ing a Higgs boson) dataset. Again results can be seen
in table 2.
3.3 Continuous Learning Benchmark
The Bike Sharing dataset will be revisited to demon-
strate the strength of our continuous learning. The
dataset was divided into two independent pieces of
similar size and with the same features because the
data’s structure already clearly indicates to do so. The
split is done into two years 2011 and 2012. On av-
erage the number of rented bikes in 2012 is higher
than in 2011. A model M
1
was trained with MANN
with the same parameters mentioned above on the
first part of the dataset. The model predicts the 2011
dataset with a root-mean-squared error of 57. Pre-
dicting the 2012 dataset with this model though leads
to a root-mean-squared error of 128. The already
trained model is used and continuously fit on the sec-
ond dataset that relates to the log of 2012 in the man-
ner that is explained in section 2.2. The neural net-
works from model M
1
are retrained with the new data.
The RMSE improves to 106 and therefore the second
Table 3: Bike Sharing Comparison RMSE.
ALGORITHM 2011 2012 BOTH
MANN FROZEN 57 128 56
MANN CL 1ST LEVEL 57 106 56
MANN CL ALL LEVELS 57 79 56
XGB FROZEN 58 130 62
LEARN++.MT 60 87 63
ANN FROZEN 69 155 67
ANN CL 69 92 67
level of continuous learning takes effect. Neural net-
works are trained on the new data and then added to
the already existing model. An RMSE of 79 is the re-
sult of the new model combining both levels of con-
tinuous learning. The neural networks of the orig-
inal model were modified and new neural networks
trained on the 2012 dataset were added. XGB trained
on the 2011 dataset achieves a root-mean-squared er-
ror of 58. Trained on the 2011 dataset it reaches
an RMSE of 130 on the 2012 dataset. An artificial
neural network with 5 hidden layers and 20, 15, 10,
5, and 1 neurons trained in 700 epochs achieves an
RMSE of 69 and 155. This ANN was retrained on the
2012 dataset. After retraining, the RMSE on the 2012
dataset is 92. Learn++.MT, an algorithm that is based
on AdaBoost with decision trees and specifically pro-
posed for incremental learning by (Muhlbaier et al.,
2004) was also tested. All results can be seen in table
3.
4 CONCLUSION
This paper proposed a novel approach for regression
and classification machine learning tasks based on
the well-known and highly popular Gradient Boost-
ing framework. The original Gradient Boosting al-
gorithm was altered to use artificial neural networks
as base learners. MANN makes heavy use of early
stopping and a heuristic to prevent overfitting. Both
make our algorithm effective and easy to use with
a minimum of hyper-parameter tuning. We demon-
strated that our algorithm achieves better results on
datasets than popular implementations of the Gradient
Boosting algorithm for example XGB. Our algorithm
makes significant improvements in prediction accu-
racy. Our algorithm also has a built-in method for
continuous learning. MANN can change the weights
of neural networks in an already trained model or train
new neural networks on a new dataset and add them
to an already trained model. It is sensible to do more
experiments with continuous learning and try to over-
come catastrophic forgetting with even the most elab-
orate learning tasks. Furthermore, it makes sense to
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
546

look into possibilities to not only add more models or
retrain existing models but also to fine-tune the exist-
ing neural networks or maybe even specific layers to
use this algorithm in incremental learning tasks. In
future research, it would make sense to add support
for unstructured data.
ACKNOWLEDGEMENTS
This work was funded by the Federal Ministry of Ed-
ucation and Research under 16-DHB-4021.
REFERENCES
Aljanabi, M., Qutqut, M. H., and Hijjawi, M. (2018). Ma-
chine learning classification techniques for heart dis-
ease prediction: A review. International Journal of
Enigneering and Technology.
Baldi, P., Sadowski, P., and Whiteson, D. (2014). Searching
for exotic particles in high-energy physics with deep
learning. Nature Communications.
Bertin-Mahieux, T., Ellis, D. P., Whitman, B., and Lamere,
P. (2011). The million song dataset. In Proceedings of
the 12th International Conference on Music Informa-
tion Retrieval (ISMIR 2011).
Bikmukhametov, T. and Jaeschke, J. (2019). Oil production
monitoring using gradient boosting machine learning
algorithm. 12th IFAC Symposium on Dynamics and
Control of Process Systems.
Chen, A. S., Huang, S.-W., Hong, P. S., Cheng, C., and Lin,
E. J. (2011). Hdps: Heart disease predictions system.
Computing in Cardiology.
Chen, T. and Guestrin, C. (2016). Xgboost: A scalable tree
boosting system. KDD 16.
Dangare, C. S. and Apte, S. S. (2012). A data mining ap-
proach for predictions of heart disease using neural
networks. International Journal of Computer Engi-
neering and Technology, pages 30–40.
Deboleena, R., Priyadarshini, P., and Kaushik, R. (2018).
Tree-cnn: A hierarchical deep convolutional neural
network for incremental learning.
Detrano, R., Janosi, A., Steinbrunn, W., Pfisterer, M.,
Schmid, J.-J., Sandhu, S., Kern H. Guppy, S. L., and
Froehlicher, V. (1989). International application of a
new probability algorithm for the diagnosis of coro-
nary artery diseas. The American Journal of Cardiol-
ogy.
Dorogush, A. V., Ershov, V., and Gulin, A. (2018). Cat-
boost: gradient boosting with categorical features sup-
port. Conference on Neural Information Processing
Systems (NeurIPS 2018).
Fanaee-T, H. and Gama, J. (2014). Event labeling combin-
ing ensemble detectors and background knowledge.
Progress in Artificial Intelligence, pages 113–127.
Friedman, J. H. (1999a). Greedy function approximation: A
gradient boosting machine. The Annals of Statistics.
Friedman, J. H. (1999b). Stochastic gradient boosting.
Computational Statistics & Data Analysis, 38.
Graf, F., Kriegel, H.-P., Schubert, M., P
¨
olsterl, S., and Cav-
allaro, A. (2011). 2d image registration in ct images
using radial image descriptors. In Fichtinger, G., Mar-
tel, A., and Peters, T., editors, Medical Image Com-
puting and Computer-Assisted Intervention – MICCAI
2011, pages 607–614, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Kaeding, C., Rodner, E., Freytag, A., and Denzler, J.
(2017). Fine-tuning deep neural networks in contin-
uous learning scenarios. In Computer Vision - ACCV
2016 Workshops, pages 588–605.
Martinez-Munoz, G. (2019). Sequential training of neural
networks with gradient boosting.
Muhlbaier, M., Topalis, A., and Polikar, R. (2004).
Learn++.mt: A new approach to incremental learning.
volume 3077, pages 52–61.
Parmar, A., Mistree, K., and Sompura, M. (2017). Machine
learning techniques for rainfall prediction: A review.
In International Conference on Innovations in infor-
mation Embedded and Communication Systems.
Raskutti, G., Wainwright, M. J., and Yu, B. (2013). Early
stopping and non-parametric regression: An optimal
data-dependent stopping rule.
Sabarinathan, V. and Sugumaran, V. (2014). Diagnosis of
heart disease using decision trees. International Jour-
nal of research in Computer Applications and Infor-
mation Technology, pages 74–79.
Sabay, A., Harris, L., Bejugama, V., and Jaceldo-Siegl, K.
(2018). Overcoming small data limitations in heart
disease prediction by using surrogate data. SMU Data
Science Review, 1(3).
Schwenk, H. and Bengio, Y. (2000). Boosting neural net-
works. Neural Computation.
Shalev-Shwartz, S. (2014). Selfieboost: A boosting algo-
rithm for deep learning.
Shapire, R. E. (1990). The strength of weak learnability.
Machine Learning, pages 197–227.
Tanno, R., Arulkumaran, K., Alexander, D., Criminisi, A.,
and Nori, A. (2018). Adaptive neural trees. 7th Inter-
national Conference on Advanced Technologies.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. Conference on
Computer Vision and Pattern Recognition.
Zriqat, E., Altamimi, A., and Azzeh, M. (2016). A com-
parative study for predicting heart diseases using data
mining classification methods. International Journal
of Computer Science and Information Security, 12.
Multiple Additive Neural Networks: A Novel Approach to Continuous Learning in Regression and Classification
547
