
Preliminary Results on Controllability of Serial Robot-Manipulators in
Singular Configurations
Mir Mamunuzzaman and J
¨
org Mareczek
Faculty of Electrical and Industrial Engineering, Landshut University of Applied Sciences, 84036 Landshut, Germany
Keywords:
Singularity, Non-Linear Controllability, Jacobian, Robot Motion Planning.
Abstract:
We develop a standard system representation and analyse controllability properties for velocity kinematics
of robot-manipulators located on singularities. These are positions where the Jacobian loses rank. Since its
column vectors span the set of admissible workspace velocity directions, it is still a widespread misunder-
standing that some directions would be locked on singularities and thus had to be bypassed as far as possible.
We will show that this does not generally hold: On some types of singularities, the kinematic shows local
redundancy, which can be used to generate paths crossing the singularity in any desired workspace velocity
direction. To further analyse controllability properties, we develop an SVD-based method to represent the
Jacobian-based velocity kinematics in standard system description of control theory without the need for in-
verse kinematics (IK). In many cases, IK do not offer a unique solution on singularities and, therefore, cannot
be used. Furthermore, we present a modification of the SVD-based method for which the analytical calcula-
tion effort is feasible. The resulting system description has the advantage of being a simple decoupled set of
single-integrators where the system states are divided into one set describing admissible workspace motions
and a second set describing possible internal motions, also called nullspace motion. Based on this standard
system representation, we determine local controllability and local accessibility for two different types of sin-
gularities. Finally, we illustrate our methods by means of a simple 3-DoF SCARA-type manipulator.
1 INTRODUCTION
Ongoing industrial transformation includes more net-
worked, automated and intelligent manufacturing
lines, (Kuo et al., 2017), (Mazzanti et al., 2019), (Na-
havandi, 2019). This leads to an increasing de-
gree of autonomy in industrial automation planning.
One emerging technology towards this direction is
computer-aided manufacturing (CAM), which aims to
connect CAD directly with a CNC tooling machine.
Beyond that, more and more industrial robots (in the
following denoted as manipulators) are used for tool-
ing. They offer the advantage of high dexterity and
a large workspace. Prominent examples are additive
manufacturing with large-scale 3D-printing, cladding
or buildup welding, cover manipulation or human-
robot collaboration.
These new manufacturing processes are charac-
terized by paths that are either very long or non-
predictable and are changed very often. This can also
be observed in many other fields of applications like
telesurgery, emergency manipulation inside nuclear
reactor cells and explosive ordnance disposal.
Clearly, these types of paths cannot be imple-
mented anymore by classical manual teaching or pro-
gramming; the corresponding work effort would be
excessive. In contrast to that, modern path plan-
ning requires the calculation of adequate joint paths
(jointspace) from given, desired paths of the end-
effector (workspace); the corresponding mapping
from workspace to jointspace is denoted as inverse
kinematics (IK). Problems arise from the fact that a
method to solve IK analytically is only known for a
very restricted type of kinematics fulfilling Pieper’s
requirements. Moreover, IK for six or more joints suf-
fer from a high computational complexity.
In addition to joint positions, path-tracking con-
trol also requires joint velocities as feed-forward con-
trol input. These velocities are calculated by means
of the inverse of the Jacobian matrix (in the following
denoted as Jacobian) of the direct kinematics.
Unfortunately, the rank of the Jacobian typically
depends on joint positions, and there exist positions
where it loses rank, so-called singularities. It is well
known that approaching such a singularity turns into
excessively large joint speeds unless the commanded
Mamunuzzaman, M. and Mareczek, J.
Preliminary Results on Controllability of Serial Robot-Manipulators in Singular Configurations.
DOI: 10.5220/0012238000003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 327-334
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
327

end-effector speed points into a special set of ad-
missible directions. Although this problem has been
known from the very beginning of robotics, singular-
ities still suffer from little research interest. In fact,
it is the general view of many roboticists that singu-
larities impose an unsolvable problem and are thus to
be bypassed as far as possible. This is also the basic
idea behind all existing control methods, for exam-
ple, damped least-square control (DLSC), (Wampler,
1986) or related methods like Non-Redundancy Sin-
gularity Avoidance (NRSA), (Huang et al., 2016),
Singularity Avoidance System (SAS), (Raineri and
Bianco, 2017), Partially Decoupling and Lineariz-
ing Control, (PDLC), (Mareczek, 2020). These ap-
proaches all lead to restrictions in tracking perfor-
mance within close vicinities of singularities (called
singular regions); these restrictions are not tolerable
in many applications.
However, singularities may also offer advantages:
Here, a manipulator can show local redundancy. Fur-
thermore, maximum forces and torques exerted by
the end-effector on the environment depend only on
break limits of mechanics rather than on actuator lim-
itations. For these reasons, a path planning method
together with an appropriate control which does not
have to avoid singularities is desirable. In fact, it is
not necessary to avoid all kinds of singularities: As
we will show by an example, there always exists a
smooth path crossing one type of singularity in any
predefined workspace direction. This is possible by
taking advantage of kinematic redundancy available
locally on that type of singularity.
Questions concerning admissible directions into
which the system states may evolve can be charac-
terized by its controllability properties. Therefore,
this paper focuses on a standard system description of
control theory for Jacobian-based velocity kinemat-
ics. Based on that, we present preliminary results
towards the characterization of singularities with re-
spect to controllability properties.
Actually, no such classification of singularities
can be found in literature. Instead, common ways
to classify singularities are: internal or boundary
type, see for example (Spong et al., 2020). In (Ki-
effer, 1994) isolated and bifurcation type of singular-
ities are defined by a differential geometric approach
characterising the curve geometry of achievable paths
in workspace. This approach uses the solution for
IK, entailing its above-mentioned problems. Interest-
ingly, the author suggests to “make use of kinematic
singularities, rather than simply negotiate past them”.
In (Nielsen et al., 1991), controllability has been
investigated with respect to the standard rigid body
model from mechanics. Hence, this system descrip-
tion is very complicated. Today’s drive systems (mo-
tors with gears) are fast enough to operate in velocity
rather than torque mode. Therefore, velocity kinemat-
ics are primarily used for motion control. However,
the authors also concluded: “One may consider [other
possibilities for controller design] instead of just giv-
ing up and saying that control in certain directions is
impossible at singularities”.
From the point of view of nonlinear control the-
ory, the Jacobian-based velocity kinematics represent
a nonlinear driftless system with the Jacobian column
vectors as control vector fields. However, the latter
depends on the time-integral of the control input vari-
ables. IK can solve this problem, but not on types
of singularities where IK don’t offer a unique solu-
tion. Therefore, we present a method to transform
the Jacobian-based velocity kinematics into a stan-
dard system description without IK, thus being ap-
plicable and valid on singularities, also. Further ad-
vantages are: Decoupling of dynamics for admissi-
ble workspace motion and possible internal dynam-
ics (nullspace motion). Thus, the nature of variable
structure shows clearly by the variable number of sys-
tem states describing admissible workspace motion.
Moreover, this leads to a natural and easy way to in-
vestigate and classify internal dynamics. Last but not
least, the new system appears as a decoupled set of
single integrators, which strongly simplifies further
system analysis and proofs.
We organize our paper as follows: First, we de-
velop a method based on SVD to rewrite the velocity
kinematics in the standard description of control the-
ory without the need for IK. Then, in section 3, we
present decoupling of the dynamics. In Section 4, we
prove that for this sample kinematic, there always ex-
ists a smooth path crossing on type of singularities.
Finally, in section 5, we apply the proposed method to
a simple SCARA-type kinematic and conclude with
some preliminary results on controllability.
2 PROBLEM FORMULATION
In this section, we outline the control problem of
robot-manipulators on singularities. To do this, let’s
first review the kinematics of serial robotic manipula-
tors. The reader is referred to standard textbooks for
more details on robot kinematics.
We start by recalling the distinction between
redundant and non-redundant robot-manipulators.
There are various ways to define redundancy (Conkur
and Buckingham, 1997). In this work, we solely take
kinematic redundancy into account. The workspace
for robot-manipulators typically describes the carte-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
328

sian position (e.g., x, y, z) and/or orientation (e.g.,
Euler-angles α, β, γ) of the robot’s end-effector. For
robot-manipulators, the variables that define the
configuration comprise the jointspace. When the
workspace and jointspace dimension are the same
1
,
a robot-manipulator is said to be non-redundant. On
the other hand, the manipulator is considered redun-
dant when the workspace dimension is greater than
the jointspace dimension.
Consider a non-redundant serial-link robot ma-
nipulator with n rigid links connected by revolute
or prismatic joints. Defining n joint variables by
q =
q
1
q
2
··· q
n
T
∈ Q ⊂ R
n
, which is also
referred to a configuration, and n workspace coordi-
nates by η
η
η =
η
1
η
2
··· η
n
T
∈P ⊂R
n
, the for-
ward kinematics are expressed as
η
η
η = f(q), (1)
with a non-linear, continuous and differentiable direct
mapping f : Q 7→P . The IK problem is to compute the
inverse mapping, f
−1
, that gives us joint variables for
a given fixed end-effector’s position and orientation.
There is a countable set of solutions possible:
f
−1
: (η
η
η, κ) 7→ q, κ ∈ {1, ··· , k} (2)
with k as the number of possible configurations.
Moreover, the solutions of IK may be infinite (hence
an uncountable set of solutions), or no solution at all
may exist.
Differentiating equation (1) with respect to time
yields
˙
η
η
η =
d
dt
f(q(t)) =
∂f(q)
∂q
˙
q =
˜
J(q)
˙
q =
n
∑
i=1
j
i
(q) ˙q
i
, (3)
where
˜
J(q) =
j
1
(q) j
2
(q) ··· j
n
(q)
∈ R
n×n
is
the configuration dependant Jacobian of f(q).
In this work, we define a configuration as singu-
lar when the Jacobian loses one or more ranks, hence
if det(
˜
J) = 0. This leads to the severe restriction that
the robot’s end-effector can no longer move in cer-
tain directions. To investigate this in more detail, we
split the space of motion of the end-effector into two
subspaces: regular space, which contains admissible
directions, and singular space, which contains locked
directions. The singular space must be an orthonor-
mal complement of the range of
˜
J, which establishes
the regular space.
However, it is still possible to move in the direc-
tion of singular space in some cases, as we will show
later. To find out under which conditions this is pos-
sible, we consider velocity kinematics (3) as a control
1
We assume the workspace and the jointspace both to
be expressed in minimal coordinates.
system and investigate its controllability properties on
the singular subspace. First, let’s recall the standard
general nonlinear system representation:
˙
x = g
0
(x) +
n
∑
i=1
g
i
(x)u
i
, (4)
where x ∈ R
m
contains the system-states, u =
u
1
··· u
n
T
∈ R
n
are the control-input variables,
and g
i
, i ∈ {0,··· , n} are smooth vector fields defin-
ing the unforced (g
0
: drift) and forced (g
1
, g
2
,···:
control) motions. Comparing (3) with standard model
(4) yields g
0
= 0 (driftless system), joint angle veloc-
ities as control-inputs u =
˙
q, workspace variables as
system-states x = η
η
η, and columns of
˜
J(q) as control
vector fields. The latter, however, explicitly depend
on joint variables q rather than on system-states η
η
η.
One approach to eliminate the dependency of q is by
substituting the IK (2):
˙
η
η
η =
˜
J(f
−1
(η
η
η,κ ))
˙
q.
The IK, nonetheless, are only known for a few ba-
sic kinematics. Furthermore, most kinematics do not
have a unique solution for the IK on a singularity. As
a result, this strategy does not apply to most manipu-
lators. Instead, we prefer a system model, see section
3, that does not require the knowledge of IK.
Additionally, the primary instrument for analysing
controllability of a non-linear system, Lie brackets
from differential geometry, cannot be used since nec-
essary smoothness assumptions are not met on singu-
larities. For system (3), we can see this issue mathe-
matically. The Lie brackets of any two vector fields
can be expressed by
[j
1
,j
2
] =
∂j
2
∂η
η
η
j
1
−
∂j
1
∂η
η
η
j
2
.
It is apparent that, on singularities,
∂j
i
∂η
η
η
is not defined
in all workspace directions ∂η
η
η. Therefore, the differ-
ential geometric approach to controllability analysis
on singularities cannot be applied.
3 SYSTEM REPRESENTATION
As starting point for a state-space formulation of the
system on singularities, in the system description, in
addition to the dynamics for the workspace variables
η
η
η, we also take into account the dynamics for joint
space variables q:
˙
η
η
η =
˜
J(q) u
˙
q = u
(5)
This seems to increase the system’s total number of
state variables to 2n. The number of state variables,
Preliminary Results on Controllability of Serial Robot-Manipulators in Singular Configurations
329

however, remains n since the forward kinematics con-
strains the joint space variables to the workspace vari-
ables.
It has already been stated that the Jacobian loses
ranks on singular configurations. We define a set that
includes all singular configurations by
Q = {q |det(
˜
J(q)) = 0}. (6)
Elements of the above set are denoted as q
∗
. Let, on
q
∗
∈Q, the Jacobian loses r ranks, i.e., rank(
˜
J(q
∗
)) =
n −r. This configuration is also called a singular con-
figuration of codimension r.
To better understand possible motions on singular-
ities, we decouple the system-states into two groups:
One spanning the regular space, the other one span-
ning the singular space. This can be performed by
singular value decomposition (SVD). An eigenvalue
decomposition (EVD) could also be applied as alter-
native to SVD in case of a quadratic Jacobian. How-
ever, unlike EVD, SVD can also be used to address
the more general case of redundant manipulators (i.e.,
non-square Jacobian).
Let us consider a singularity of codimension r.
Here, the SVD of the manipulator Jacobian
˜
J(q
∗
) can
be decomposed into
˜
J(q
∗
) =
˜
U(q
∗
)
˜
Σ(q
∗
)
˜
V
T
(q
∗
), (7)
where columns u
i
of
˜
U and v
i
of
˜
V for i ∈ {1, ··· , n}
form an orthonormal basis of R
n
, and singular values
σ
∗
i
, i ∈ {1,···, n} with the r smallest singular values
equal to zero form the diagonal matrix
˜
Σ(q
∗
) ∈ R
n×n
.
Without loss of generality we may assume that all
vanishing singular values are gathered at the end, i.e.,
˜
Σ(q
∗
) = diag{σ
∗
1
,··· , σ
∗
n−r
, 0, ··· , 0}. Denoting the
left and right singular matrix on a singular configura-
tion with
˜
U
∗
=
˜
U(q
∗
) and
˜
V
∗
=
˜
V (q
∗
) and the diag-
onal matrix by
˜
Σ
∗
=
˜
Σ(q
∗
) = diag{
˜
Σ
∗
nz
, 0, ··· , 0}, the
SVD of
˜
J(q
∗
) can be expressed as
˜
J
∗
=
˜
U
∗
˜
Σ
∗
˜
V
∗T
, (8)
where
˜
Σ
∗
nz
is a diagonal matrix comprised of all non-
zero singular values of the Jacobian. We now develop
a state-space representation for the velocity kinemat-
ics using SVD of the Jacobian on singular configura-
tions:
Proposition 3.1. Assume velocity kinematics (5) are
on a singular configuration. We introduce a virtual
control ζ
ζ
ζ =
ζ
1
··· ζ
n
T
. Then by defining n new
system states z =
z
1
··· z
n
T
, it’s always possible
to rewrite system representation (5) in the following
decoupled form:
˙
z = ζ
ζ
ζ
˙
q = h(q)ζ
ζ
ζ,
(9)
with h(q) as a virtual control function possibly non-
linearly relates the virtual and the actual control vari-
ables.
Proof. The assumption that velocity kinematics (5)
are on a singular configuration implies rank defi-
ciency of the Jacobian. Let us consider a singular-
ity of codimension r. The left singular matrix
˜
U
∗
can be decomposed as
˜
U
∗
=
˜
U
∗
I
˜
U
∗
S
with
˜
U
∗
I
=
u
∗
1
··· u
∗
n−r
∈R
n×n−r
that spans the range space
of
˜
J
∗
, i.e., R (
˜
J
∗
) and
˜
U
∗
S
=
u
∗
n−r+1
··· u
∗
n
∈
R
n×r
that spans the singular space of
˜
J
∗
. Similarly,
the right singular matrix
˜
V
∗
can also be decomposed
as
˜
V
∗
=
˜
V
∗
I
˜
V
∗
S
with
˜
V
∗
I
=
v
∗
1
··· v
∗
n−r
∈
R
n×n−r
, and
˜
V
∗
S
=
v
∗
n−r+1
··· v
∗
n
∈ R
n×r
that
spans the null space of
˜
J
∗
, i.e., N (
˜
J
∗
).
We define (n −r) new system states so that
(˙z
1
··· ˙z
n−r
)
T
=
˜
U
∗T
I
˙
η
η
η. (10)
Using velocity kinematics and performing SVD on
the Jacobian, from (10), it follows:
(˙z
1
··· ˙z
n−r
)
T
=
˜
U
∗T
I
˜
U
∗
˜
Σ
∗
˜
V
∗T
˙
q =
˜
Σ
∗
nz
˜
V
∗T
I
˙
q.
(11)
Next, using the non-zero singular values of the Jaco-
bian, we define a diagonal matrix as follows:
˜
S
∗
=
˜
S(q
∗
) = diag{σ
∗
1
,··· , σ
∗
n−r
, 1, ··· , 1}.
Note that the last r elements of the above diagonal ma-
trix are set to a constant, non-zero value just to make it
invertible. For convenience we chose number 1. The
inverse, hence, exists by construction:
˜
S
∗−1
= diag{σ
∗−1
1
,··· ,σ
∗
n−r
−1
, 1, ··· , 1}.
With
˜
S
∗−1
, we define virtual control variables ζ
ζ
ζ =
(ζ
1
··· ζ
n
)
T
by
˙
q = h(q
∗
)ζ
ζ
ζ =
˜
V
∗
˜
S
∗−1
ζ
ζ
ζ (12)
In this case, (ζ
1
··· ζ
n−r
)
T
are to control in non-
singular directions, while (ζ
n−r+1
··· ζ
n
)
T
are to con-
trol potentially existing internal dynamics in the
singular direction. Inserting (12) in (11) yields
˜
Σ
∗
nz
˜
V
∗T
I
˜
V
∗
˜
S
∗−1
ζ
ζ
ζ =
ζ
1
··· ζ
n−r
T
and, thus, we
obtain a set of single-integrator systems:
˙z
i
= ζ
i
, i ∈{1, ··· , n −r}. (13)
Given (13), it is evident that the last r elements of the
virtual control, i.e., (ζ
n−r+1
··· ζ
n
)
T
are not included
in the system description (as desired), but are included
in (12) to determine
˙
q. If one resolves (12) for ζ
ζ
ζ, the
results are:
ζ
ζ
ζ =
˜
S
∗
˜
V
∗T
˙
q ⇒ζ
i
=
(
σ
∗
i
v
∗T
i
˙
q, i ∈ {1, ··· , n −r}
v
∗T
i
˙
q, i ∈ {n −r + 1, ··· , n}
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
330

Therefore, the last r rows define the dynamics in sin-
gular space. It completes the total dynamics of the
system, including singular and non-singular direc-
tions. To get a standard form of the dynamics in sin-
gular space, a locally reversible coordinate transfor-
mation q ∈ R
n
7→ z
i
∈ R, for i = {n −r + 1, ··· , n}
is defined in such a way that it satisfies the following
time derivative:
˙z
i
= v
∗T
i
(q)
˙
q. (14)
This new set of variables (z
n−r
··· z
n
)
T
contains the
state variables describing the dynamics in singular di-
rections. In summary, the complete state space repre-
sentation thus follows from (13) and (14) to
˙
z = ζ
ζ
ζ, with
˙
q = h(q)ζ
ζ
ζ = V
∗
S
∗−1
ζ
ζ
ζ.
Remark: In comparison to (5), state-space rep-
resentation (9) has the advantage of totally decou-
pling workspace dynamics (described by z) from joint
space dynamics. Another significant advantage is
that the workspace dynamics are separated into a
non-singular range (z
1
··· z
n−r
)
T
and a singular range
(z
n−r+1
··· z
n
)
T
.
3.1 Alternative Decomposition of
˜
J
In the previous section, we observe that for rewrit-
ing the system dynamics, we need to compute
˜
Σ
∗
,
˜
U
∗
and
˜
V
∗
on singular configurations. With a large Ja-
cobian, however, an analytical expression to perform
SVD is highly complex. Hence, we propose an alter-
native and less complex method to SVD:
Proposition 3.2. Assume velocity kinematics (5) are
on a singular configuration. Consider virtual control
ζ
ζ
ζ = (ζ
1
··· ζ
n
)
T
, defined by:
˙
q =
˜
K
∗
ζ
ζ
ζ =
˜
K(q
∗
)ζ
ζ
ζ =
k
∗
1
k
∗
2
··· k
∗
n
ζ
ζ
ζ, with matrix
˜
K
∗
∈ R
n×n
. Con-
struct an orthonormal matrix
˜
W
∗
=
˜
W (q
∗
) = [w
∗
1
···w
∗
n−r
n
∗
1
···n
∗
r
] ∈ R
n×n
such that its first (n − r) columns {w
∗
···w
∗
n−r
}
span R (
˜
J
∗
), and the last r columns {n
∗
1
···n
∗
r
} span
N (
˜
J
∗T
). If n new system-states
˙
z = (˙z
1
··· ˙z
n
)
T
satisfy
˙
z =
˜
W
∗T
˙
η
η
η, then it is always possible to construct a
˜
K
∗
that satisfies the decoupled state-space representation
in (9) with
˙
q =
˜
K
∗
ζ
ζ
ζ.
Proof. Consider (5) on a singular configuration of
codimension r. According to the fundamental theo-
rem of linear algebra, the following holds:
1. dim(R (
˜
J
∗
)) = n −r and dim(N (
˜
J
∗T
)) = r
2. N (
˜
J
∗T
) is the orthogonal complement to R (
˜
J
∗
)
By construction,
˜
W
∗
is an orthogonal matrix, with its
first n −r columns describing non-singular directions
and the last r columns describing singular directions.
Next, we consider n new system-states such that
the first (n −r) states (z
1
··· z
n−r
)
T
describe the non-
singular dynamics and the last r states (z
n−r+1
··· z
n
)
T
describe the singular dynamics, and assume, they sat-
isfy the following relation:
˙
z =
˜
W
∗T
˙
η
η
η
(3)
=
˜
W
∗T
˜
J
∗
˙
q. (15)
Since the last r columns span the space N (
˜
J
∗T
),
it follows that all elements of the last r rows of
˜
W
∗T
˜
J
∗
become zero, so that ˙z
i
= 0, i ∈ {n −r +
1, ··· , n}. Next we define virtual control variables ζ
ζ
ζ
by
˙
q =
k
∗
1
k
∗
2
··· k
∗
n
ζ
ζ
ζ with {k
∗
n−r+1
,··· ,k
∗
n
}∈
N (
˜
J
∗
). From (15) we further obtain
˙
z =
˜
W
∗T
˜
J
∗
˜
K
∗
ζ
ζ
ζ.
We define a matrix
˜
E
a×b
∈ R
a×b
which comprises
an identity matrix I
min{a,b}
and the rest of the elements
are zeros. Since the last r rows of
˜
W
∗T
˜
J
∗
vanish, we
can reduce it to an n −r dimension identity matrix i.e.,
˜
E
n−r×n
˜
W
∗T
˜
J
∗
k
∗
n−r+1
··· k
∗
n
=
˜
E
n−r×n
.
In order to achieve a decoupled dynamic in
z
n−r+1
··· z
r
, one can arbitrarily choose k
i j
= 0
for i ∈ {n −r + 1,··· , n} and j ∈ {1, ··· , n −r} in
the above underdetermined system. The remaining
k
∗
i
=
k
i1
··· k
i(n−r)
T
results in a unique soluton:
k
∗
1
··· k
∗
n−r
=
˜
E
n−r×n
˜
W
∗T
˜
J
∗
˜
E
n×n−r
−1
.
Finally, along with the last r columns of
˜
K
∗
, the fol-
lowing relation
˙
z =
˜
W
∗T
˜
J
∗
˜
K
∗
ζ
ζ
ζ = diag{1, .. ., 1,0, .. ., 0}ζ
ζ
ζ (16)
gives the desired state-space representation in single
integrator form:
˙z
1
··· ˙z
n−r
˙q
n−r+1
··· ˙q
n
T
= ζ
ζ
ζ.
Remark: Expression (16) is similar to SVD
˜
U
∗T
˜
J
∗
˜
V
∗
=
˜
Σ
∗
= diag{σ
∗
1
, ··· , σ
∗
n−r
, 0, ··· , 0} with
two matrices
˜
W
∗T
and
˜
K
∗
that are analogous to the left
and right singular matrices
˜
U
∗T
and
˜
V
∗
. The differ-
ence is that a normalized matrix is considered while
constructing
˜
W
∗T
and the orthonormality criterion in
˜
V
∗
is lost while constructing
˜
K
∗
.
4 CONTROLLABILITY
In this section, we will investigate the controllability
of serial robotic manipulators with the above formu-
lated feed-forward control law (12) on different sin-
gular configurations. It is already stated in section
Preliminary Results on Controllability of Serial Robot-Manipulators in Singular Configurations
331

2 that differential geometric techniques, commonly
used in the analysis of controllability and accessibility
of nonlinear systems, are inapplicable due to the lack
of smoothness around the singularity. Before going
further, we first demonstrate that
Proposition 4.1. The proposed control law (12) is
continuous on an open-ball vicinity of singular con-
figurations.
Proof. Outside the singular configuration, the joint
angle trajectory is always well-defined by
˙
q =
˜
J
−1
(f
−1
(η
η
η, κ ))
˙
η
η
η, since the inverse kinematics have
a unique solution, and the Jacobian has full rank. On
singularity, control law (12) gives the unique solution
for the inverse of the velocity dynamics. This leaves
only the case when we are in a vicinity of the singu-
larity, i.e., q → q
∗
. For continuity, it is sufficient to
show that the following relation holds:
lim
q→q
∗
˜
V (q)
˜
S
−1
(q)ζ
ζ
ζ = q
∗
. (17)
If this does not hold, then there exists a ε
ε
ε ∈ R
n
̸= 0
such that
lim
q→q
∗
˜
V (q)
˜
S
−1
(q)ζ
ζ
ζ −q
∗
= ε
ε
ε. (18)
Then left multiplication with (
˜
S
∗
˜
V
∗T
) leads to
lim
q→q
∗
(
˜
S
∗
˜
V
∗T
˜
V (q)
˜
S
−1
(q)ζ
ζ
ζ) −
˜
S
∗
˜
V
∗T
q
∗
=
˜
S
∗
˜
V
∗T
ε
ε
ε.
The left side of this equation further details to:
lim
q→q
∗
(
˜
S
∗
˜
V
∗T
˜
V (q)
˜
S
−1
(q)ζ
ζ
ζ) −
˜
S
∗
˜
V
∗T
q
∗
=
˜
S
∗
˜
V
∗T
˜
V
∗
lim
q→q
∗
(
˜
S
−1
(q)ζ
ζ
ζ) −
˜
S
∗
˜
V
∗T
q
∗
=
˜
S
∗
lim
q→q
∗
(
˜
S
−1
(q)ζ
ζ
ζ) −
˜
S
∗
˜
V
∗T
q
∗
=
˜
S
∗
˜
S
∗−1
ζ
ζ
ζ
∗
−ζ
ζ
ζ
∗
= diag{σ
∗
1
σ
∗−1
1
,··· ,σ
∗
n−r
σ
∗
n−r
−1
,1, ··· , 1}ζ
ζ
ζ
∗
−ζ
ζ
ζ
∗
= 0
Since the right-hand side of (18) certainly does not
vanish, this contradicts the above assumption; there-
fore, (17) must be valid. Hence, by construction, the
feed-forward control law is continuous.
At this point, we discuss control strategies of
robot-manipulators on singularities. The system rep-
resentation is first formulated close to singular config-
urations, as shown in section 3. This provides us with
n −r control input variables for admissible motion in
workspace and r control input variables for null space
motion in singular space. Depending on the nature of
the singularity, the null space motion can then be used
to escape it.
Singularities of redundant manipulators, based on
the presence of internal motion (also known as self-
motion), are classified into two categories, see, e.g.,
(Chang and Khatib, 1995), (Oetomo and Ang, 2009).
Internal motion changes joint configuration with con-
stant end-effector pose. Type-1 singularities, where
internal motion caused by null space motion changes
the singular direction, and Type-2 singularities, where
the null space motion doesn’t provide any internal
motion – moving in any direction is not possible.
Similarly, for non-redundant manipulators, based
on the presence of internal motion, we classify sin-
gularities in Type-1 and Type-2 singularities since
non-redundant manipulators show local redundancy
on some singularities. To begin, it is crucial to deter-
mine which singularities provides internal motion.
In (6), a set Q was defined that contains all singu-
lar configurations. Consider, P to be an open subset
of Q i.e., P ⊆ Q. Let’s define a function on P as
P 7→ R : Φ(q) = det(
˜
J). (19)
Then, P is time-invariant if
˙
Φ(q) = 0 holds for all q ∈
P. In other words, internal motion is possible due to
null space motion in the open subset P. The following
lemma gives us a sufficient condition for the existence
of internal motion on singularities in (9):
Lemma 4.2. A sufficient condition for existence of
internal motion is
∂Φ(q)
/∂q
T
˜
K(q)[n −r +1 : n] = 0 for
all q ∈ P.
Proof. Differentiating (19) yields
˙
Φ =
∂Φ(q)
∂q
T
˙
q=
∂det(
˜
J(q))
∂q
T
˜
K
∗
ζ
ζ
ζ.
By definition of internal motion
˙
Φ must vanish:
∂Φ(q)
/∂q
T
˜
K
∗
ζ
ζ
ζ = 0. On the singular surface P, ζ
1
=
··· = ζ
n−r
= 0 so that for all ζ
n−r+1
,··· ,ζ
n
∈ R
∂Φ(q)
/∂q
T
k
∗
n−r+1
··· k
∗
n
ζ
n−r+1
···ζ
n
T
= 0
⇐⇒
∂Φ(q)
/∂q
T
k
∗
n−r+1
··· k
∗
n
= 0
T
.
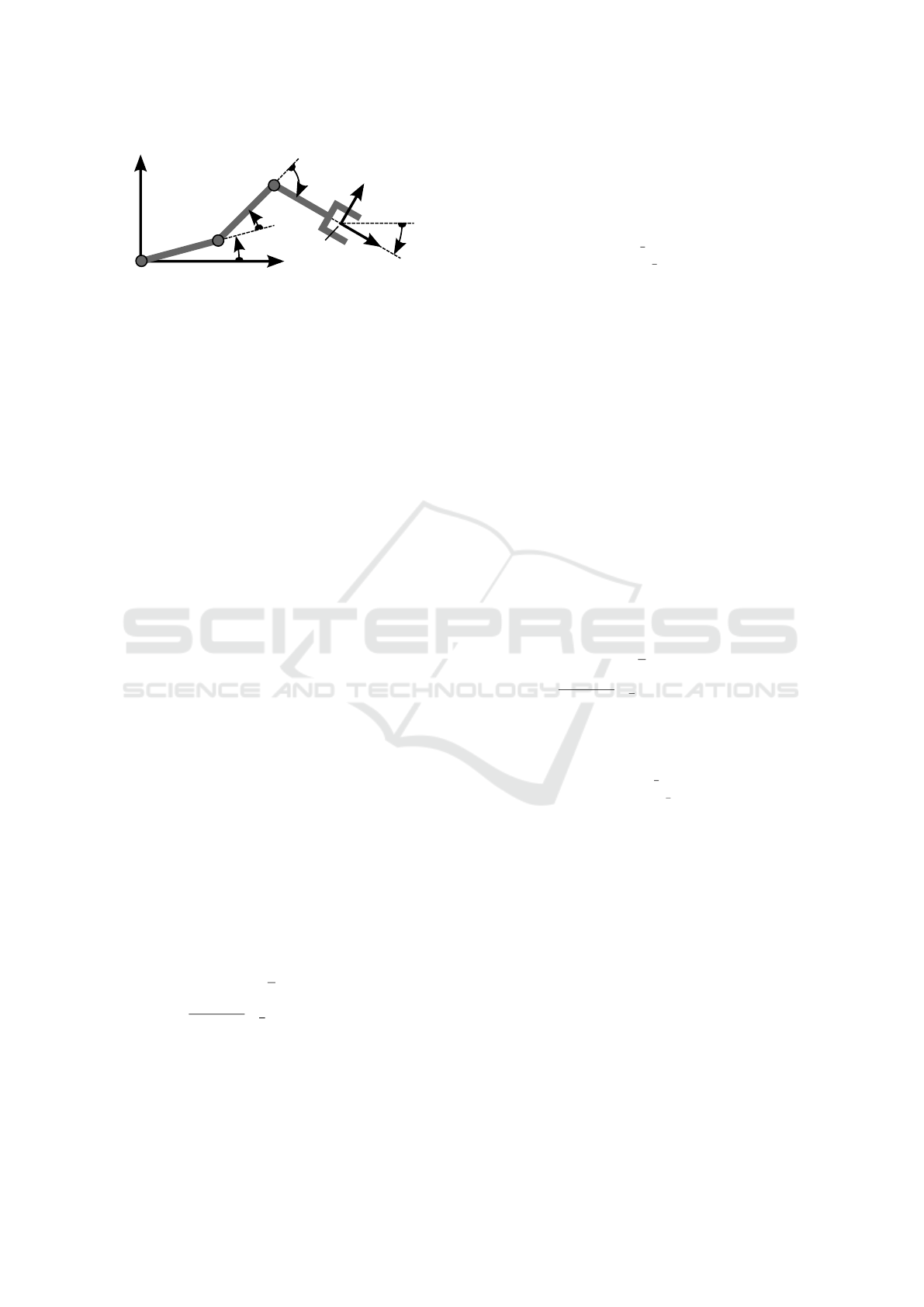
5 NUMERICAL EXAMPLE
To illustrate the concepts introduced in section 3, a
planar 3-DoF manipulator is considered; see Figure
1. For the end-effector (EE), position (x, y) and ori-
entation α are considered as workspace coordinates
η
η
η = (x, y,α)
T
and three joint angles as joint variables
q = (θ
1
,θ
2
,θ
3
)
T
. To simplify the kinematics, we as-
sume l
1
= l
2
= l
3
= 1.
The direct kinematics calculate to
f : q 7→η
η
η =
c
1
+c
12
+c
123
s
1
+s
12
+s
123
θ
1
+θ
2
+θ
3
,
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
332
y
x
−θ
3
−α
x
EE
S
0
θ
2
θ
1
y
EE
S
EE
l
1
l
2
l
3
Figure 1: Planar 3-DoF Ellbow-Manipulator.
with the usual abbreviations: c
1
= cos θ
1
, c
12
=
cos(θ
1
+ θ
2
),···. Then the Jacobian follows to
˜
J(q) =
h
−s
1
−s
12
−s
123
−s
12
−s
123
−s
123
c
1
+c
12
+c
123
c
12
+c
123
c
123
1 1 1
i
,
with singularities for θ
2
∈ {0,±π}. The IK solutions
on these singular configurations might not be unique.
For instance, when θ
2
= 0, we have a unique IK solu-
tion for a fixed η
η
η:
θ
1
(η
η
η) = arctan2 (x −c
α
,y −s
α
),
θ
2
(η
η
η) = 0,
θ
3
(η
η
η) = α −θ
1
(η
η
η).
On the contrary, when θ
2
= π, we have an infinite
number of solutions represented by the straight line:
θ
1
+ θ
3
= α − π. For the latter case, the singu-
larity locus becomes a helix in the workspace S =
{(x,y,α)|x = c
α
∧y = s
α
∧α = R}, with s
α
= sin(α)
and c
α
= cos(α). Hence, on θ
2
= 0, we have a unique
IK solution but rank loss, while on θ
2
= π, we have
rank loss and an infinite number of solutions of IK.
5.1 System Representation
5.1.1 Case θ
2
= π
With θ
1
+θ
3
= α−π the Jacobian becomes
˜
J
∗
(θ
1
, α) =
h
−s
α
s
1
−s
α
−s
α
c
α
−c
1
+c
α
c
α
1 1 1
i
,
with Null space
˜
J
∗
(θ
1
, α)
−1 0 1
T
= 0 and nor-
mal vector to the plane of admissible motions
˜
J
∗T
(θ
1
, α)
−c
1
−s
1
s
3
T
= 0 . (20)
A normalized orthogonal matrix is given by
˜
W
∗
(θ
1
,θ
3
) =
1
b
bs
1
c
1
s
3
−c
1
−bc
1
s
1
s
3
−s
1
0 1 s
3
,
with b =
√
3−cos(2θ
3
)
/
√
2. Its first two columns span
R (
˜
J
∗
) and the last column spans N (
˜
J
∗T
) as stated in
Proposition 3.2. Inserting in the velocity kinematics
yields
˜
W
∗
˙
z =
˜
J
∗
˙
q ⇔
˙
z =
˜
W
∗T
˜
J
∗
˙
q =
h
c
3
1+c
3
c
3
b b b
0 0 0
i
˙
q. (21)
Instead of the real control variables
˙
q we intro-
duce virtual control variables ζ
ζ
ζ such that
˙
q =
˜
K
∗
ζ
ζ
ζ =
k
1
k
2
k
3
ζ
ζ
ζ with k
3
= (−1 0 1)
T
, null space of
˜
J
∗
at θ
2
= π. If one arbitrarily chooses k
13
= k
23
= 0,
then
˜
K
∗
=
"
−1
1
b
(c
3
+1) −1
1
1
b
c
3
0
0 0 1
#
. (22)
Inserting this in (21) we obtain
˙
z =
˜
W
∗T
˜
J
∗
˙
q =
˜
W
∗T
˜
J
∗
˜
K
∗
ζ
ζ
ζ = diag{1, 1,0}ζ
ζ
ζ. (23)
Hence, with the matrix
˜
K
∗
in (22), the decoupled
state-space representation for (5) on singularity θ
2
=
π is as follows:
˙z
1
˙z
2
˙q
3
T
= ζ
i
, i ∈{1, 2, 3}. (24)
5.1.2 Case θ
2
= 0
With θ
1
+ θ
3
= α and θ
2
= 0, the Jacobian becomes
˜
J
∗
(θ
1
, α) =
−2s
1
−s
α
−s
1
−s
α
−s
α
2c
1
+c
α
c
1
+c
α
c
α
1 1 1
.
The null space of the Jacobian and a vector that is nor-
mal to the plane of admissible motions are (1 −2 1)
T
and (c
1
s
1
s
3
)
T
respectively. Similar to the previous
case, a normalized orthogonal matrix
˜
W
∗
can be set
up using the normal vector of the plane of motion by
˜
W
∗
(θ
1
, θ
3
) =
1
b
bs
1
c
1
s
3
c
1
−bc
1
s
1
s
3
s
1
0 −1 s
3
,
with b =
√
3−cos(2θ
3
)
/
√
2, whose first two columns
span R (
˜
J
∗
) and the last column spans N (
˜
J
∗T
). Fol-
lowing all steps stated in proposition 3.2, we end up
again with (24) and the virtual control law
˙
q =
˜
K
∗
ζ
ζ
ζ =
"
−1
1
b
(c
3
+1) 1
1
1
b
c
3
−2
0 0 1
#
ζ
ζ
ζ.
5.2 Controllability
Next, for this example, the function in (19)
is defined as Φ(q) = det(
˜
J) = s
2
. The pres-
ence of a time-invariant subset implies that
˙
Φ =
∂Φ(q)
/∂q
T
˙
q =
0 c
2
0
˜
K
∗
ζ
ζ
ζ = 0. To stay on sin-
gular space, we set ζ
1
= ζ
2
= 0 and it follows
0 1 0
k
31
k
32
k
33
T
= 0. This requires k
32
=
0 and according to Lemma 4.2, internal motion exists,
otherwise not.
For the case θ
2
= π, it is evident that k
32
= 0 and
it also implies
˙
θ
2
= 0. Thus, a finitely extended jour-
ney in null space is possible, and identified as Type-1
singularity. On the other hand, for θ
2
= 0 we have
nonzero k
32
. Hence, in this case, self-motion doesn’t
exist and is identified as Type-2 singularity.
Preliminary Results on Controllability of Serial Robot-Manipulators in Singular Configurations
333

Next, we investigate what type of controllability
we have on Type-1 and Type-2 singularities for this
example. Before moving forward, it is still unclear
whether internal motion on Type-1 singularity per-
mits coverage of the entire admissible direction in the
workspace. For a pure null space motion, we have
ζ
1
= ζ
2
= 0. Then, the corresponding motion in joint
space is
˙
θ
1N
= −ζ
3
,
˙
θ
2N
= 0,
˙
θ
3N
= ζ
3
. This is in-
tegrable over time so that θ
1N
= −ζ
3
t −ζ
30
, θ
2N
=
ζ
30
, θ
3N
= ζ
3
t + ζ
30
. Inserting into normal vector
(20) yields
n(t) =
−cos (−ζ
3
t−ζ
30
)
−sin (−ζ
3
t−ζ
30
)
sin(ζ
3
t+ζ
30
)
=
−cos(φ)
sin(φ)
sin(φ)
.
It suffices to find at least two values for φ
so that the corresponding n are linearly inde-
pendent. This is given by φ ∈ {0, π}: n ∈
{
−1 0 0
T
,
0 1 1
T
}. Since the two variants
of n are linearly independent, this holds also for the
corresponding vectors n ×j
1
. This proves that along
a null space motion, we can go in any direction.
We now have the necessary tools to specify con-
trollability on singularities. On a Type-2 singularity,
we can only move in the null space motion direction.
As a result, we can pass the singularity, but cannot
follow all the desired trajectories. In this situation,
we have only local accessibility. On Type-1 singular-
ities, on the other hand, we can move in any direction
by changing the null space motion direction, and we
can follow any desired trajectories. As a result, in
this instance, we have local controllability. However,
we cannot instantly follow trajectories since modify-
ing the configuration with the internal motion takes
some time to obtain the desired null space motion di-
rection. As a result, on Type-2 singularities, we have
local controllability but not small-time local control-
lability(STLC).
6 SUMMARY AND OUTLOOK
This work considers control issues in robot motion
planning instead of avoiding singular configuration
when the desired trajectory passes through singular-
ities. We proposed a method for totally decoupling
velocity kinematics representation for planner robot-
manipulators on singularities. The proposed method
is particularly attractive for analytical computation
since it doesn’t need SVD. An interesting outcome is
the classification of singularities based on their con-
trollability property. The limitation of this result is we
can only classify singularities for the example we are
considering here. Yet, the observations could lead to
some interesting possibilities. We are confident that
achieving local controllability is possible in various
kinds of internal singularities. This line of research
will be expanded in the future.
REFERENCES
Chang, K.-S. and Khatib, O. (1995). Manipulator control
at kinematic singularities: A dynamically consistent
strategy. IEEE/RSJ International Conference on Intel-
ligent Robots and Systems. Human Robot Interaction
and Cooperative Robots, pages 84–88.
Conkur, E. and Buckingham, R. (1997). Clarifying the def-
inition of redundancy as used in robotics. Robotica,
15:583 – 586.
Huang, Y., Yong, Y. S., Chiba, R., Arai, T., Ueyama, T.,
and Ota, J. (2016). Kinematic control with singular-
ity avoidance for teaching-playback robot manipula-
tor system. IEEE Transactions on Automation Science
and Engineering, 13:729–742.
Kieffer, J. (1994). Differential analysis of bifurcations
and isolated singularities for robots and mechanisms.
IEEE Transactions on Robotics and Automation,
10:1–10.
Kuo, C. J., Ting, K.-C., and Chen, Y.-C. (2017). State of
product detection method applicable to industry 4.0
manufacturing models with small quantities and great
variety: An example with springs. International Con-
ference on Applied System Innovation (ICASI), pages
1650–1653.
Mareczek, J. (2020). Local optimal tracking control for ma-
nipulators with restrictive joint velocity and accelera-
tion limits. IEEE/ASME International Conference on
Advanced Intelligent Mechatronics (AIM), pages 230–
237.
Mazzanti, M., Cristalli, C., Gagliardini, L., Carbonari, L.,
Lattanzi, L., and Massa, D. (2019). A novel trajec-
tory generation algorithm for robot manipulators with
online adaptation and singularity management. IEEE
28th International Symposium on Industrial Electron-
ics (ISIE), pages 1115–1120.
Nahavandi, S. (2019). Industry 5.0 - a human-centric solu-
tion. Sustainability, 11.
Nielsen, L., de Wit, C. C., and Hagender, P. (1991). Con-
trollability issues of robots in singular configurations.
IEEE International Conference on Robotics and Au-
tomation, pages 2210–2215.
Oetomo, D. and Ang, M. H. (2009). Singularity robust algo-
rithm in serial manipulators. Robotics and Computer-
Integrated Manufacturing, 25:122–134.
Raineri, C. G. and Bianco, M. L. (2017). An automatic sys-
tem for the avoidance of wrist singularities in anthro-
pomorphic manipulators. 13th IEEE Conference on
Automation Science and Engineering (CASE), pages
1302–1309.
Spong, M. W., Hutchinson, S., and Vidyasager, M. (2020).
Robot Modeling and Control. John Wiley & Sons,
Ltd., secoind edition.
Wampler, C. (1986). Manipulator inverse kinematic solu-
tions based on vector formulations and damped least-
squares methods. IEEE Transactions on Systems,
Man, and Cybernetics, 16:93–101.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
334
