
Learning How to Use a Supernumerary Thumb
Ali Seçkin Kaplan
1
, Emre Akın Ödemiş
1
, Emre Doğan
1
, Mehmet Orhun Yıldırım
1
, Youness Lahdili
1
,
Amr Okasha
2
and Kutluk Bilge Arıkan
1,3 a
1
Department of Mechanical Engineering, TED University, Ankara, Turkey
2
Department of Mechanical Engineering, Middle East Technical University, Ankara, Turkey
3
Neuroscience and Neurotechnology Center of Excellence, NÖROM, Ankara, Turkey
okasha.amr@metu.edu.tr
Keywords: Motor Learning, Supernumerary Limb, Mirror Paradigm, Leader-Follower Modality.
Abstract: This study presents a novel system consisting of a supernumerary robotic thumb and a virtual reality-based
mirror paradigm in a leader-follower mode. As the extra thumb skeleton, a planar robotic mechanism with
two degrees of freedom is utilized. The experimental setup poses the task of acquiring proficiency in
controlling the supernumerary second thumb throughout a five-day duration of engaging in the leader-
follower game. There is evidence that after five days of practice, a subject's motor performance improves and
motor variability decreases.
1 INTRODUCTION
Supernumerary Robotic Limbs (SRLs) are at the
forefront of human-robot cooperation and integration
research. They are designed to increase job efficiency
and safety, augment different human body functions,
and restore certain capabilities for persons with
disabilities (Yang et al., 2021; Tong & Liu, 2021).
Supernumerary limbs include robotic arms, robotic
legs, and supernumerary robotic fingers (SRFs).
Supernumerary robotic fingers are often intended to
serve two functions. The aforementioned goals are to
supplement a healthy person's hand (Ariyanto et al.,
2017; Hussain et al., 2017) or to compensate for lost
functions caused by severe disorders like strokes
(Salvietti et al., 2021; Lee et al., 2021). The majority
of supernumerary robotic fingers are meant to aid in
the grasping of daily objects, while some are aimed to
better a human-performed task, such as playing the
piano (Cunningham et al., 2018). The potential
applications of a supernumerary robotic finger design
may be constrained in comparison to other forms of
supernumerary robotic limbs, primarily due to
limitations imposed by size and weight
considerations. Most supernumerary robotic fingers
are designed with specialization in mind, focusing on
a
https://orcid.org/ 0000-0003-2093-1577
the accomplishment of a singular task, such as
grasping.
The objective of this study is to establish a
framework for examining the enhancement of manual
dexterity in healthy individuals through the utilization
of a robotic supplementary thumb as an additional
appendage. We considered a scenario in which,
instead of using the original thumb to push or
compress an elastic object, a supernumerary robotic
thumb is employed to execute the same action. In the
meanwhile, the original thumb is utilized to
manipulate a joystick. The proposed novel system
combines SRF with a virtual reality-based leader-
follower game. The interaction force due to the
compression of the spring is utilized in the virtual
reality environment to make the follower’s avatar
track the leader. While following the leader, the
subject is instructed to shoot a laser gun at a target on
the leader in order to score points by manipulating the
joystick. The game was played by a participant on a
daily basis, completing 15 rounds each day for a
consecutive period of 5 days. The performance was
analyzed within the context of motor learning. The
score attained during the phases of habituation,
learning, and retention are used to characterize motor
learning. Additionally, motor variability is used to
assess motor learning.
Kaplan, A., Ödemi¸s, E., Do
ˇ
gan, E., Yıldırım, M., Lahdili, Y., Okasha, A. and Arıkan, K.
Learning How to Use a Supernumerary Thumb.
DOI: 10.5220/0012240000003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 489-494
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
489
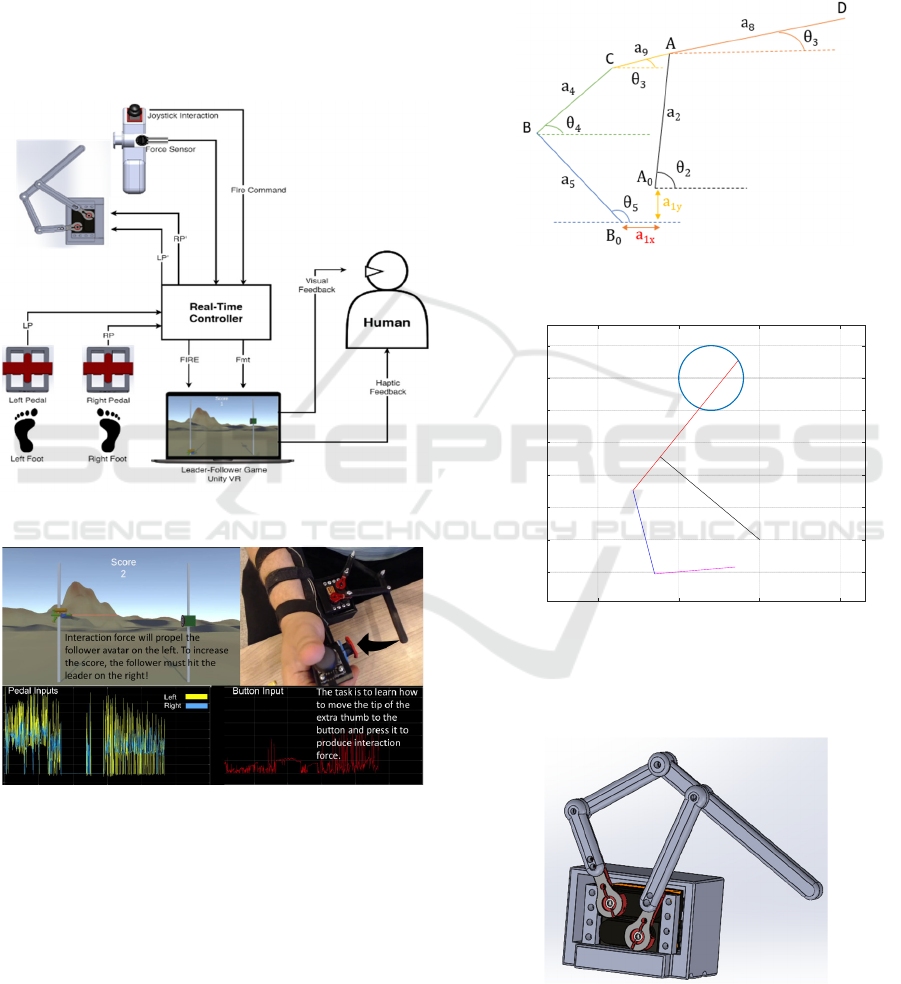
2 EXPERIMENTAL SYSTEM
The experimental system is developed to study how
we learn to utilize the supernumerary thumb while
playing a virtual reality-based leader-follower game.
Figure 1 shows the components of the system and
Figure 2 illustrates typical data monitoring during the
rounds. For each round, the pedal and button force
inputs, joystick firing inputs, leader and follower
positions, and scores are all recorded. The system's
components are discussed in the following sections.
Figure 1: Overall system architecture.
Figure 2: Screen shots of a typical round.
2.1 Two Degrees of Freedom (DOF)
Robotic Thumb
The chosen topology for the supernumerary thumb is
a 2 degree-of-freedom planar robot arm, as depicted
in Figure 3. The mechanism offers alternative
learning opportunities by presenting challenges in
both task space and joint space mapping of pedal
inputs. The selection of working space is undertaken
to uncover potential avenues for exploration during
the training process, Figure 4. Determining link
lengths is achieved through simulations that aim to
reach the desired exploration space while considering
feasible transmission angles. Transmission angles
are necessary for maintaining the desired interaction
forces, such as when exerting pressure on the red
button.
Figure 3: Two degrees of freedom planar mechanism as the
second thumb mechanism.
Figure 4: Screen shot from the kinematic animation of the
mechanism tracing a circular path in workspace. Tip of the
mechanism is point D.
Figure 5: Solid model of the synthesized mechanism with
the actuators.
-100 -50 0 50
X
D
[m]
-20
0
20
40
60
80
100
120
Y
D
[m]
[mm]
[mm]
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
490
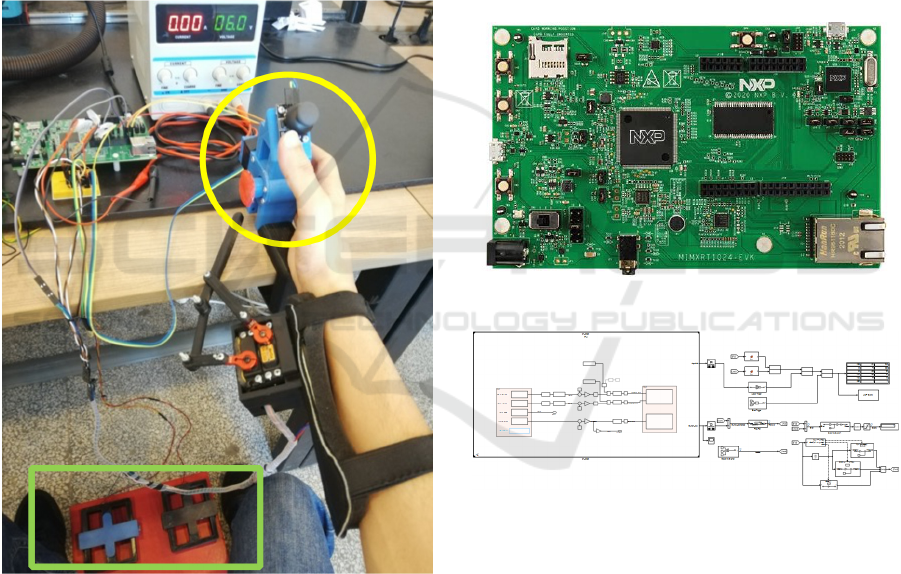
2.2 Hand Interface and Pedals
The objective of this study is to acquire the skill of
pressing the red buttons depicted in Figures 2 and 6
using the supernumerary thumb. This action will
result in the generation of an interaction force, which
is produced by compressing a linear spring. The force
sensor detects the generated interaction force, which
is then processed by the microcontroller board. In the
game, the follower avatar utilizes it as a means of
generating upward propulsion. Furthermore, the input
is transformed into a linear mapping that is then
converted into a pulse width modulated (PWM)
signal. This signal is subsequently utilized to drive a
vibrating motor, which in turn delivers haptic
feedback to the player's wrist.
Figure 6: Pinching interface (in yellow circle) and pedals
(in green rectangle).
The experimental setup that has been developed
consists of two pedals, one for the left foot and
another for the right foot, as depicted in Figure 6. A
force sensor, specifically a force-sensing resistor, is
installed on each pedal. To address the issue of
parasitic noise originating from the lengthy 1.5-meter
wires connecting the sensors to the pedals, as well as
for signal conditioning purposes, an operational
amplifier (op-amp) is employed in a voltage-follower
configuration. This configuration is placed between
each sensor and its corresponding analog-to-digital
converter (ADC) input. The microcontroller employs
a linear mapping technique to convert pedal forces
into two pulse width modulation (PWM) signals.
These signals serve as reference position inputs for
the two mini servomotors that drive the two degrees
of freedom (2-DOF) thumb mechanism, as shown in
Figure 5. The position control systems that are
inherently present within the RC-servo motors are
exclusively employed.
2.3 Real-Time Control System
In this study, i.MX RT1024-EVK microcontroller
board is used as the real-time control hardware,
Figure 7.
Figure 7: Real-time control hardware.
Figure 8: Real-time control system built in Simulink and
runnig on MXP board – part 1 on the left, part 2 on the right.
The software architecture for this project has been
developed using MATLAB/Simulink. The system
can be conceptually separated into two primary
components: (1) the module responsible for acquiring
data and transmitting actuation signals to and from
the external environment, and (2) the module that
executes game control algorithms and manages the
physics of the system, as depicted in Figure 8.
The first part utilizes the MBDT toolbox,
providing access to the peripherals of the i.MX
RT1024-EVK, a robust microcontroller board
operating at a frequency of 500MHz. This board is
capable of supporting real-time scheduling. The ADC
Learning How to Use a Supernumerary Thumb
491

(Analog-Digital Converter) blocks and PWM (Pulse
Width Modulation) blocks were utilized to
successfully interface with the sensors and control the
actuation process. The connection between the two
stages of blocks is facilitated by a pipeline consisting
of commonly used Simulink gain, bias, numerical
filter, and saturation blocks. It is important to
acknowledge that the determination of the values in
these blocks was primarily based on empirical
methods, taking into consideration the mechanical
limitations of the servo motors. Significantly, every
MBDT block offers a means of accessing
MCUXpresso Config, an independent software tool
designed for the purpose of advanced configuration
of the peripherals of i.MX RT1024-EVK. It is at this
stage that we can configure the ADC resolutions,
PWM frequency, initial duty cycle, pin assignments,
and various other parameters that pertain to the low-
level layer of the microcontroller.
The subsequent component of our architectural
design is responsible for managing the underlying
principles that dictate the dynamics of the "leader-
follower" game. This includes the application of
Newtonian mechanics, the establishment of scoring
mechanisms, the implementation of a "leader" signal,
the establishment of boundaries, and the enforcement
of a time limit of 90 seconds for each iteration. The
aforementioned values are encoded and parsed into
packets, which are subsequently transmitted over the
User Datagram Protocol (UDP) to an IP address. This
IP address corresponds to the location where the
"leader-follower" game is actively listening. It is
important to note that this game, developed using the
Unity engine, operates concurrently on a distinct
instance that is external to MATLAB. The initial
component of the architecture, which is solely
concerned with sensing and actuating, operates at a
sampling frequency of 100 Hz. However, the
subsequent component responsible for executing
intricate algorithms operates at a higher frequency of
1 KHz.
The initial segment is executed on the
microcontroller board depicted in Figure 7, while the
subsequent segment is executed on the primary
computer that hosts MATLAB. The utilization of the
PIL (Processor-in-the-Loop) framework of the i.MX
RT1024-EVK board enables the achievement of this
capability. It is considered the recommended
approach for co-simulation of this nature, wherein
each processing platform assumes responsibility for
its respective native blocks.
2.4 Leader-Follower Game
The mirror paradigm's leader-follower modality is
implemented within a game format, utilizing the
Unity engine. The leader, equipped with a target pane,
is executing a uniaxial motion in both the upward and
downward directions. The objective of the follower
positioned on the left is to consistently track the
movements of the leader and skilfully engage the
target by discharging the laser weapon, thereby
acquiring points. Figure 10 presents a screenshot
from the implementation.
The leader's motion is made up of the sum of three
sine waves, which provides a complex reference for
the follower. However, such references have been
proven in the literature to be implicitly learned (Pew,
1974; Polat, 2022).
The force resulting from the interaction between
the second thumb and the button in the hand interface
is utilized as the vertical force for propelling the
avatar of the follower in an upward direction. In order
to induce downward movement of the avatar, it is
necessary to decrease the interaction force to a
magnitude that is lower than the weight of the avatar.
This reduction in force will generate a net force in the
negative y direction.
Figure 9: Leader-follower game in Unity.
2.5 Experimental Protocol
The participant, a 23-year-old male, was instructed to
complete the game challenge in the conventional
manner, excluding the use of the sixth finger, and
instead utilizing their own thumb. Then, the
individual puts on the robotic extra thumb on their
right hand and engages in the game as a daily regimen
consisting of 15 rounds, each lasting 90 seconds, over
a span of 5 consecutive days.
On a daily basis, the experimental procedure
consisted of a series of rounds. For each day, the
initial 2 rounds were designated as habituation runs,
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
492
followed by 11 rounds of learning trials, and
concluding with 2 rounds specifically designed as
retention runs. The leader's pattern is the same
throughout the habituation and retention rounds.
During the training sessions, the leader moved in the
habituation pattern's mirror symmetry.
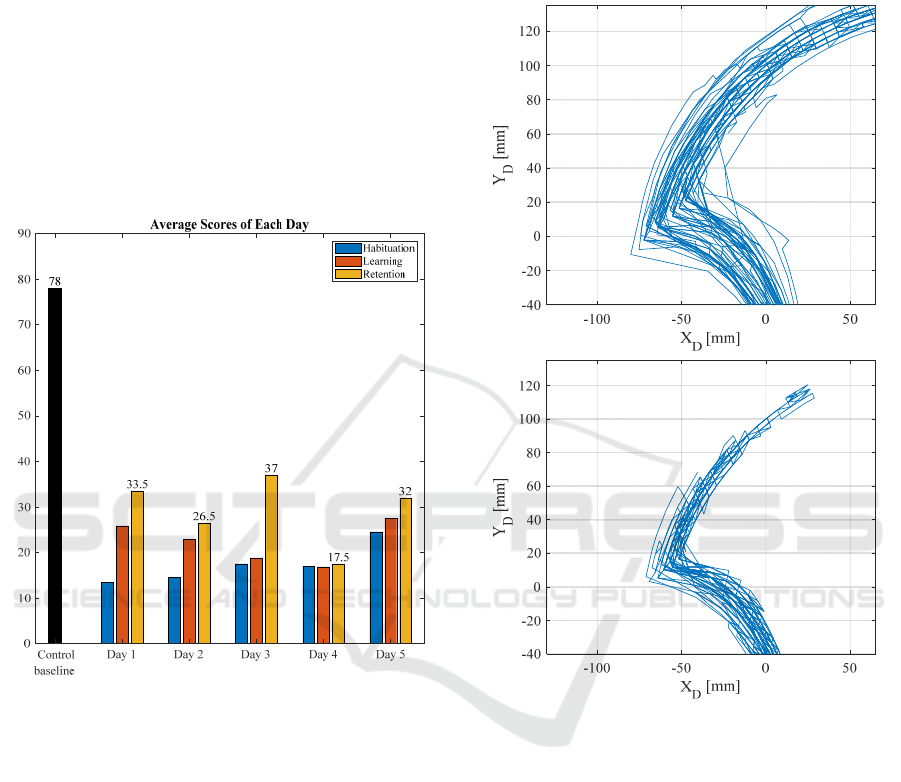
3 RESULTS AND DISCUSSION
The score of the subject is presented in Figure 11. The
black bar shows the performance without extra
robotic limb.
Figure 10: Average scores.
Daily, the subject's performance improves when
the scores of the habituation and retention trials are
compared. When the habituation scores of all sessions
are compared, there is a positive trend. However,
when learning and retention performance for the
whole experimental time is examined, we do not
detect a comparable tendency. As a result, it is
difficult to claim that a skill can be learned in 5 days
of training.
Additionally, we examined the motor variability
of the supernumerary thumb control. During motor
learning, it is known that the exploration phase must
be diminished, and the exploitation phase must be
prolonged. This reduces the motor variability of the
subject’s control action (Dhawale et al., 2017). We
discussed the trajectory of the tip point D of the
robotic thumb mechanism to evaluate the motor
variability. The trajectories observed during the final
round of training on the first and fifth days are shown
in Figure 12. When the trajectories are compared, the
reduced motor variability is interpreted as a sign of
motor learning progress.
Figure 11: Trajectories of point D – Top: Last round of
day 1, Bottom: Last round of day 5.
4 CONCLUSIONS
A novel system has been developed to investigate the
process of motor learning during practice involving
the control of a supernumerary second thumb. The
setup allows for the investigation of learning in either
the joint or task space of the supernumerary limb.
Further research will investigate the variations in
retention and transfer of motor learning that
correspond to the learning spaces.
In this study, the motor learning task can be
categorized into various regimens. The initial subtask
involves positioning the robotic finger's tip in
proximity to the red button. Subsequently, the finger
Sco
r
e
Learning How to Use a Supernumerary Thumb
493

must acquire the capability to apply force to the
button to propel the avatar in the game. Lastly, the
finger must possess the ability to anticipate the
movements of the leader in order to effectively pursue
the leader avatar. In addition, it is imperative to
acquire the skill of accumulating points via the act of
firing the laser beam by utilizing the organic thumb
in conjunction with the robotic thumb. Hence, the
experimental system can be utilized to investigate
diverse characteristics of motor learning. It is
important to assess the motor performance in each
phase separately as well.
For the first regime, where it is learned to navigate
the robotic finger's tip from its initial position to the
button location, motor performance increases over
repeated rounds. Motor variability in this phase is
reduced as shown in Figure 12. Nevertheless, there is
criticism regarding the necessity for additional rounds
and extended periods of time to acquire proficiency
to accumulate scores as following the leader avatar.
This inquiry serves as the central focus of our ongoing
research, namely, the investigation into the methods
by which motor learning can be facilitated or
enhanced. This study demonstrates the fundamental
integration of a robotic finger and a virtual reality
system using the mirror paradigm. The subsequent
stage involves the development of shared control
architectures with the aim of facilitating motor
learning. Furthermore, the utilization of force fields,
haptic interaction, and disturbances will be employed
to augment the process of motor learning (Özen et al.,
2021; Brookes et al., 2020). In addition to the
kinematic and kinetic data, neuroplasticity will be
evaluated by processing the EEG data. To evaluate
motor learning concretely, nonlinear measures will be
used.
REFERENCES
Ariyanto, M., et al. "Development of low cost
supernumerary robotic fingers as an assistive device,"
2017 4th International Conference on Electrical
Engineering, Computer Science and Informatics
(EECSI), Yogyakarta, Indonesia, 2017, pp. 1-6
Brookes J, Mushtaq F, Jamieson E, Fath AJ, Bingham G,
Culmer P, et al. (2020) Exploring disturbance as a force
for good in motor learning. PLoS ONE 15(5): e0224055
Cunningham, J., Hapsari, A., Guilleminot, P., Shafti, A.,
& Faisal, A. A. (2018). The supernumerary robotic
3rd thumb for skilled music tasks. 2018 7th IEEE
International Conference on Biomedical Robotics and
Biomechatronics (Biorob).
Dhawale, A. K., et al. (2017). The Role of Variability in
Motor Learning, Annu. Rev. Neurosci. 40:479–98
Hussain, I., Salvietti, G., Spagnoletti, G., Malvezzi, M.,
Cioncoloni, D., Rossi, S., & Prattichizzo, D.
(2017). A soft supernumerary robotic finger and mobile
arm support for grasping compensation and hemiparetic
upper limb rehabilitation. Robotics and Autonomous
Systems, 93, 1–12.
Lee J., et al. "Assistive supernumerary grasping with the
back of the hand," 2021 IEEE International Conference
on Robotics and Automation (ICRA), Xi'an, China,
2021, pp. 6154-6160.
Özen Ö, Buetler KA and Marchal-Crespo L (2021)
Promoting Motor Variability During Robotic
Assistance Enhances Motor Learning of Dynamic
Tasks. Front. Neurosci. 14:600059.
Pew, R. W. (1974). Levels of analysis in motor control,
Brain Research, vol. 71, no. 2-3, pp. 393–400.
Polat, Y. E. (2022), Development of a human-animation
interaction system to evaluate synchronization,
prediction and implicit learning, M.Sc. Thesis, TED
Universtiy.
Salvietti, G., Franco, L., Tschiersky, M., Wolterink, G.,
Bianchi, M., Bicchi, A., Barontini, F., Catalano, M.,
Grioli, G., Poggiani, M., Rossi, S., & Prattichizzo, D.
(2021). Integration of a passive exoskeleton and a
robotic supernumerary finger for grasping
compensation in chronic stroke patients: The softpro
wearable system. Frontiers in Robotics and AI, 8, 1–9.
Tong Y. and Liu J., "Review of Research and Development
of Supernumerary Robotic Limbs," in IEEE/CAA
Journal of Automatica Sinica, vol. 8, no. 5, pp. 929-952,
May 2021.
Yang, B., et al. "Supernumerary Robotic Limbs: A Review
and Future Outlook," in IEEE Transactions on Medical
Robotics and Bionics, vol. 3, no. 3, pp. 623-639, Aug.
2021.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
494
