
Thorough Analysis and Reasoning of Environmental Factors on
End-to-End Driving in Pedestrian Zones
Qazi Hamza Jan, Arshil Ali Khan and Karsten Berns
RPTU Kaiserslautern-Landau, Erwin-Schr
¨
odinger-Straße 52, 67663, Kaiserslautern, Germany
Keywords:
Autonomous Driving, Pedestrian Zones, End-to-End Driving.
Abstract:
With the development of machine learning techniques and increase in their precision, they are used in different
aspects of autonomous driving. One application is end-to-end driving. This approach directly takes in the
sensor data and outputs the control value of the vehicle. End-to-end systems have widely been used. The
goal of this work is to investigate the effect of change in weather condition, presence of pedestrians, and
reason the prediction failure, along with improving the results in a pedestrian zone. Driving through the
pedestrian zone is challenging due to the narrow path and crowd of people. This work uses RGB images
from a front-facing camera mounted on the roof of a minibus and outputs the steering angle of the vehicle. A
Convolutional Neural Network (CNN) is implemented for regression prediction. The testing was first done in
a simulation environment which comprised of the replicated version of the campus, the sensor system and the
vehicle model. Thorough testing is done in different weather conditions and with the simulated pedestrians
to check the robustness of the system for such diversified changes in the environment. The vehicle avoided
the simulated pedestrians placed randomly at the boundary of narrow paths. In an unseen environment, the
vehicle approached the region with the same texture it was trained on. Later, the system was transferred to a
real machine and further trained and tested. Due to unavailability of the ground truth, the results can not be
delineated for real world testing, but are reasoned through visual monitoring. The vehicle followed the path
and performed well in an unseen environment as well.
1 INTRODUCTION
The automotive industry is increasing the autonomy
of their vehicles for a better drive experience. This
rapid evolution of current automotive technology has
the goal to deliver greater safety benefits and a vari-
ety of autonomous driving systems (Levinson et al.,
2011). The fundamental concept of autonomous driv-
ing is to have a sensor reading from different sensors
and input into a Driving Decision Making (DDM)
system. The vehicle is driven based on the control
approach implemented in the DDM. Two main ap-
proaches for autonomous driving are modular and
end-to-end. In the modular approach, the navigation,
path-planning, safety, etc., are separately done (Yurt-
sever et al., 2020). Modular systems can be easily
identified and are replaceable, but it becomes costly
to maintain them. End-to-end systems, on the other
hand, uses the pre-processed data directly from the
sensors fed into the model and gives the relevant out-
put such as steering, velocity, or braking of the ve-
hicle. Such models are supervised by training with
Figure 1: Driverless Minibus on campus of RPTU
Kaiserslautern-Landau (Jan and Berns, 2021). It is meant
to ferry 6-8 people from building to building in the campus.
huge data (Argall et al., 2009) or by improving the
results based on reward function with reinforcement
learning (Sutton et al., 1998).
Autonomous vehicles (AVs) have commenced op-
erating in Pedestrian zones as well, to provide means
of transport for, especially elderly and disabled peo-
Jan, Q., Khan, A. and Berns, K.
Thorough Analysis and Reasoning of Environmental Factors on End-to-End Driving in Pedestrian Zones.
DOI: 10.5220/0012242900003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 495-502
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
495

ple. This is due to the increasing lengths of pedestrian
zones. Such AVs mainly assist traveling from build-
ing to building which also fits in the category of first
and last-mile travel. Driving through pedestrian zones
offers major challenges. Unlike ordinary street view,
it has unstructured paths without markings and highly
dynamic obstacles - the pedestrians themselves. Hav-
ing said that, these pedestrians cross the vehicle while
remaining on the boundary of the path. Unpredictable
crossing decision from pedestrians impels the vehicle
to drive irregularly. For DDM systems using a mod-
ular approach, it becomes difficult to navigate pre-
cisely in narrow paths due to highly imprecise GPS
signals in a closed and cluttered building area (Chang
et al., 2009). The local mapping is also frequently up-
dated as a consequence of recurring pedestrians pass-
ing by the vehicles. To remove such interruptions,
researchers are relying more on interacting with the
pedestrians (Jan et al., 2020b). Although it reduces
the braking behavior of the vehicle by giving the vehi-
cle’s intent in advance, it does not stop the pedestrians
from crossing the vehicle.
With the aforementioned motivation and chal-
lenges, this paper focuses on exploring the usage of
an End-to-end system for an AV in a pedestrian zone.
It uses a CNN which feeds on RGB images to predict
steering values. A detailed investigation is done to
see the effect of unstructured environment, different
weather conditions, and presence of pedestrians. Due
to unknown results at the start of the work and safety
concerns of the pedestrians, initial testing was done
in the simulation environment. Apart from hardware
troubles, simulation offers to recreate a dedicated test-
ing scenario which aligns with the idea of this work.
The final goal of this work was to bridge a gap
between the simulated to a real vehicle shown in fig-
ure 1. The vehicle is configured with safety certified
system (Jan and Berns, 2021) to avoid any kind of
collision in case of incorrect prediction.
The novelty of this work is summarized below:
• Preparation of training data.
• Impact of unstructured crossings and inconsistent
width lanes on End-to-end learning.
• Effect of different weather conditions, such as
sunny, foggy, rainy and snowy on the driving be-
havior.
• Finding the change in driving pattern in the pres-
ence of a pedestrian.
• Bridging a gap between simulation and real-world
systems.
After the related work in the next section, imple-
mentation details are given in the section 4. Extensive
experiments and their evaluations for simulated envi-
ronment are done in section 4.1. The transfer learning
for real system is given in section 5.
2 RELATED WORK
The first use of a similar system is done in (Pomer-
leau, 1988), where the authors have used a CNN to
predict 45 direction outputs with 29 hidden layers.
Monocular camera and radar images were used as in-
put to the network.
The authors in (Bojarski et al., 2016) did similar
work, by training a CNN on the images captured. But
instead of using a single camera, they used three cam-
eras: the front facing camera, right camera and the
left camera. The data was collected on a road scenario
with different lighting conditions. NVIDIA’s CNN ar-
chitecture is used, where the network’s weights were
trained to reduce the mean squared error between the
steering command predicted by the network and the
steering angle by a Human driver. But before feeding
the data to the network, data augmentation was done
by adjusting random shift and rotation. The results
were tested on a simulator.
End-to-end learning is also integrated with prob-
abilistic algorithms to improve predicted steering an-
gles (Hubschneider et al., 2017). They use a plan-
ning algorithm based on probabilistic sampling. Ad-
ditional safety is provided by using end-to-end learn-
ing. This combination overcomes the black-box con-
cept and provides a control instance for the output.
In order to further improve the safety, trajectory opti-
mization is performed which minimizes the given cost
function, which in addition also helps in dynamic ob-
stacles detection using some sensors.
Authors in (Lee and Ha, 2020) have also used im-
age based end-to-end driving for autonomous vehi-
cles. They have used a Long-term Recurrent Convo-
lutional Network. They rely more on time-series vi-
sion data. They have experimented with their system
in a simulator with a typical street like environment.
Similar work has been done by many researchers
to use end-to-end driving systems on autonomous ve-
hicles. Mostly, the work is done in simulation and
few have tested it on a real vehicle. No work is found
to have thoroughly tested the system for different fac-
tors like weather conditions, driving among pedestri-
ans, and arbitrary structure of a pedestrian zone. This
paper analyzes the effect of such factors.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
496
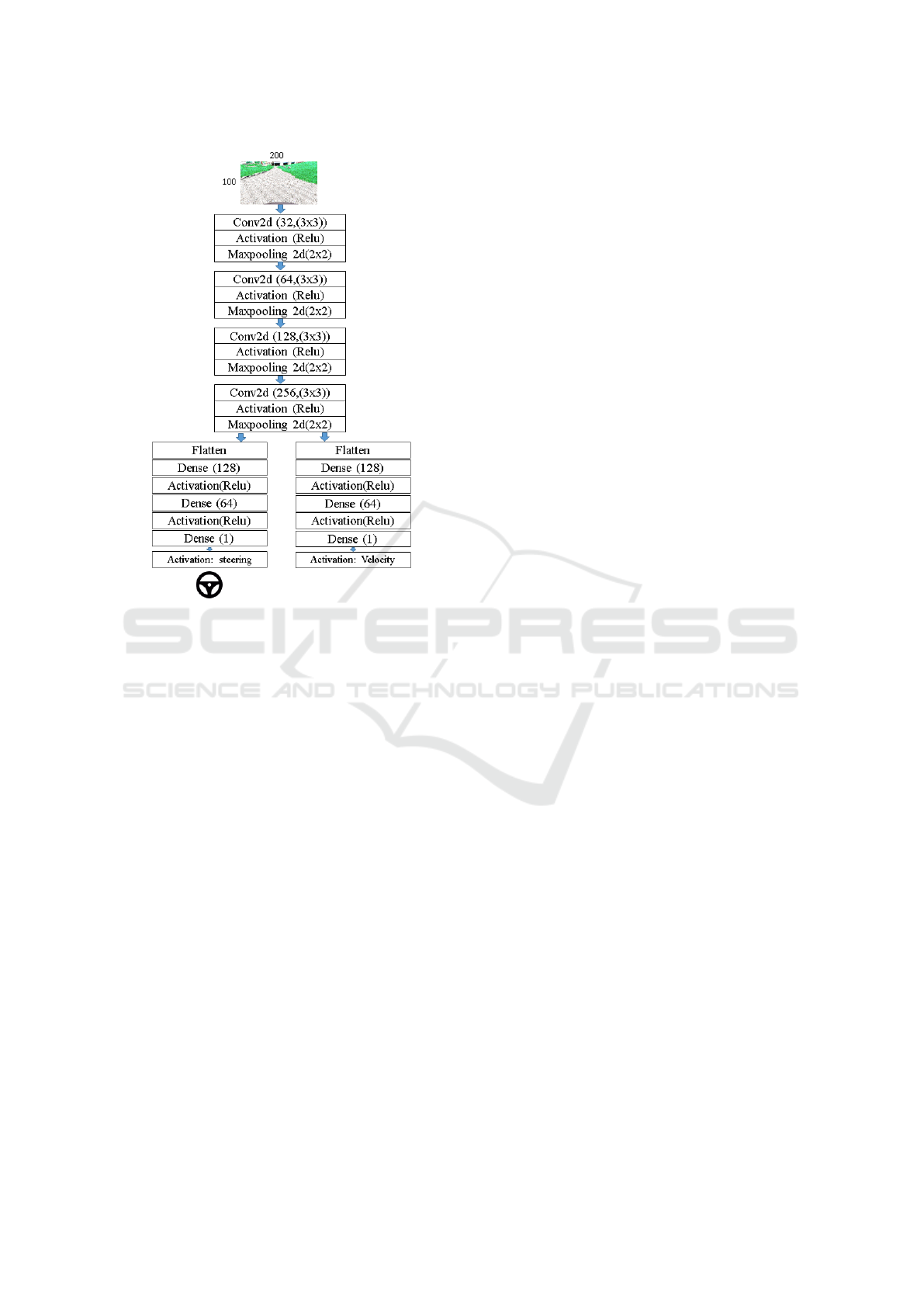
Figure 2: Network architecture.
3 NETWORK ARCHITECTURE
CNNs are extensively used in various applica-
tions (He et al., 2016; He et al., 2017; Chen et al.,
2018). Such networks simplifies the process of ex-
tracting features manually and predicting the cor-
responding outcome of the system. Detection and
identification systems are easily implementable and
can be tested on real hardware. For the training
and testing purpose, a Keras Multi-Output CNN-
Regression model was developed, where Keras func-
tional API (Manaswi, 2018) is used to build a multi-
output deep learning model.
After training the model with RGB images, the
model was able to predict the two most important
driving parameters: steering angle and the vehicle ve-
locity. The output value of steering angle resides be-
tween -1 to +1 (normalization for maximum steering
angle of the vehicle) and velocity values defined be-
tween 0 to 1 (normalization of maximum velocity of
the vehicle). Hence, the model is named Multi-output
CNN-Regression model.
To determine the driving behavior by the network,
for instance following the path and avoiding pedestri-
ans, the prime concern was the steering of the vehi-
cle; hence, only the steering node is considered and
taken into use for this work. Meanwhile, velocity
was not pertinent for these tests due to the following
reasons: not to entangle the predicted steering values
with varying values of velocity; low level safety mod-
ules override the velocity values due to safety con-
cerns; speed did not have any contribution in the anal-
ysis of the result; it is not practical to control velocity
in the crowded environment; and early testing did not
show any discernible results. Therefore, the velocity
was not taken into account and vehicle drove at a con-
stant walking speed, i.e., 6km/h.
Initially, the input data, RGB image, resized to
200x100, is passed through the convolutional layers,
i.e., through a CNN shown in figure 2, where the fea-
ture extraction is performed on the image data through
multiple convolutions, max-pooling layers using Relu
as the activation function. Once the features are ex-
tracted, regression layers are applied to the network
to get the steering and velocity as the output.
4 SIMULATION
Since neural networks offer no satisfactory explana-
tion for their outcome, it necessitates to begin testing
in simulated environments. The campus of University
of Kaiserslautern-Landau and the ego-vehicle shown
in figure 1 were replicated in Unreal Engine (UE). UE
has the advantage of fine rendering of the scene. This
aids in realistic data of the visual sensor implemented
in the simulation. It also includes a class to define
the physics of the vehicle. The vehicle used for this
work consists of a double ackermann steering to cater
sharp turns. The interface (Wolf et al., 2020) between
our robotic framework and UE is implemented to re-
ceive the camera images and, in return, control the
vehicle. The interface provides RGB images from the
sensor plugin in the UE which is fed to the network
after resizing. The steering values from the network
are denormalized to -22
◦
to 22
◦
(left to right) for the
UE model of the vehicle. The established interface
between UE and our framework is designed in such
a manner to enable directly switching between real
hardware and simulation.
Weather. In the UE editor, the sky-plugin is inserted
which furnishes the environment with the possibility
of weather conditions. Effects and changes in various
elements of weather, for example, sun brightness, are
available by tweaking the suitable parameters. The
data was collected in a variety of conditions to test
the network for every class of weather. The included
classes were: sunny, rain, snow, and fog with differ-
ent daylight conditions. Sample images of weather
classes from the simulation can be seen in figure 3.
Thorough Analysis and Reasoning of Environmental Factors on End-to-End Driving in Pedestrian Zones
497
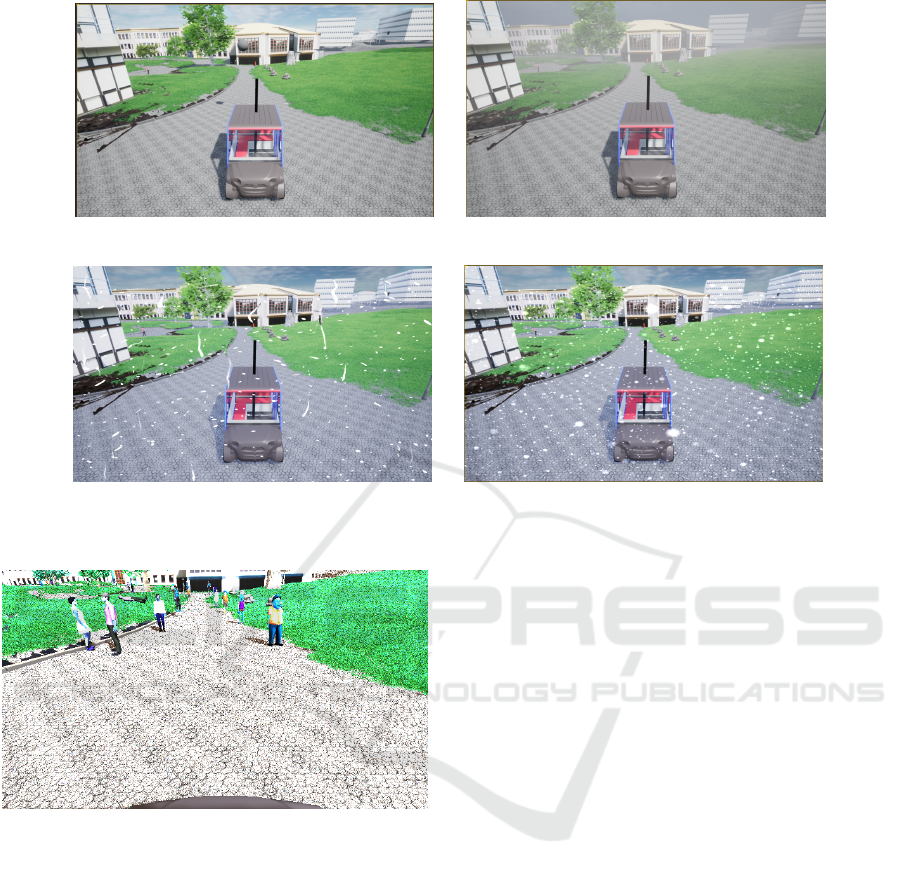
(a) Sunny (b) Fog
(c) Rain (d) Snow
Figure 3: Sample of different weather condition in the simulated environment.
Figure 4: Data set sample for training images with pedestri-
ans along the path in the campus.
Pedestrians. As the driving for this work was fo-
cused on the pedestrian zone, it was rational to drive
through pedestrians in simulation and investigate how
well the network performs. Simulated pedestrians are
spawned to test the network in a crowded environ-
ment. The virtual pedestrians were used from our
previous work (Jan et al., 2021; Jan et al., 2020a).
These virtual pedestrians offer realistic behavior in
terms of crossing the vehicle and reaching its goal.
It was proposed to keep the pedestrians static on the
boundary of the path, example shown in figure 4, to
scrutinize the evasion behavior along with changing
weather. This minimizes the testing variables.
Training Process. Neural networks for imitation
learning heavily relies on how good training data is
created. Hence, it becomes critical to make sure of
the type of data and its distribution. Since there is
no data set available which provides testing for situ-
ations like: change in weather, random placement of
pedestrians, and irregular pathways in shared spaces,
we had to generate our own data set. To prepare data
for training, the simulated bus was driven by several
users with a joystick on the different paths of the cam-
pus. RGB images from the front camera mount on the
roof of the vehicle were recorded along with the steer-
ing values given by the user. The user was told to stay
in between the path while driving. In case of pedes-
trian presences, the user was told to avoid them but
not drive off the path.
Multiple pedestrians were randomly positioned
along the border of the path because people are ex-
pected to take partial responsibility and give way to
the vehicle. Some sample training images are given
with the experiments. For every training sequence,
the pedestrians were relocated and reoriented at dif-
ferent positions. Individual and group formation was
incorporated. To measure how well the driving takes
place in the test phase, a spline is created along the
center of the drivable path. Spline assisted user to re-
main in path during training and and compare results
during the test phase. Once the model is developed,
training is started with the input image data as well
as the ground truth values of steering angle. As men-
tioned in the previous section, the velocity was kept
constant. The data augmentation is performed con-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
498
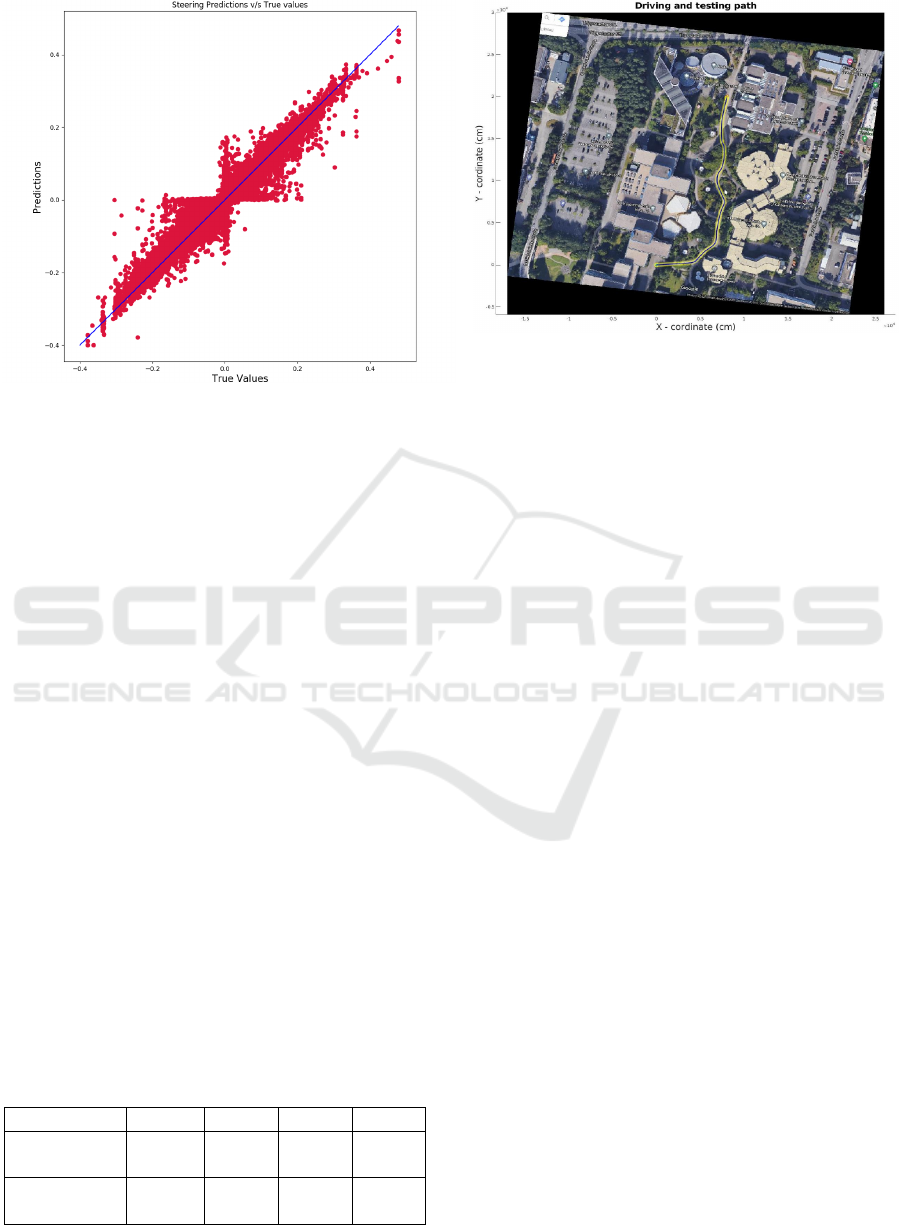
Figure 5: Scatter plot for Steering angle prediction v/s
Ground Truth.
sisting of adding noise, flipping images along with
the steering angles, and changing brightness. Further-
more, the data is split into 70 by 30 for the evaluation
process.
For training, the images were collected at 15
fps. The vehicle was driven multiple times and data
was recorded for all weather conditions and random
pedestrian placement. The number of data collected
during training is shown in the table 1. To validate the
results, a scatter plot between predicted and ground
truth is drawn in figure 5. For low true values, the
model under steers. On the other hand, for zero steer-
ing the model has high noise. Possibly, high fre-
quency of such low values were unnoticeable during
driving.
4.1 Experiment and Evaluation
This section gives a detailed explanation of how dif-
ferent weather conditions and the presence of pedes-
trians affects the output of the network. Unseen data
was also tested to comprehend the adaptation of the
network. As explained in section 4, the simulated
pedestrians were placed on the path to observe the
slight change in steering while crossing them. Due to
the restricted length of the paper, the results are shown
Table 1: Count of data collection for all classes.
Condition Sunny Snow fog Rain
Without
Pedestrians
22250 10020 13796 13902
With
Pedestrians
1801 3333 2605 2801
Figure 6: The image shows the structure of training and test-
ing data at campus of RPTU Kaiserslautern-Landau. The
model of campus was replicated in the model and same path
was driven in the simulation. The path in the plots shown
for testing is overlayed in black with yellow outline for co-
herence.
for the trajectory identified as yellow in figure 6. For
all the graphs shown in this section, Blue is the spline
trajectory in the center of the path as ground truth.
Green is the predicted trajectory by the network. Red-
circle represents the location of the collision and re-
setting the vehicle manually on the path.
The testing in the simulation was done in a fixed
order to observe the improvement in results; the net-
work was trained on one class and tested on the other
class. In this way, we could identify the reasons for
failures and dependency of one weather condition on
another.
Sunny. The training was done with bright sunlight
at different times of the day. The sample of weather
conditions can be seen in figure 3a. Strong shadows
are expected for this case which moves along the path
of the sun. The graph in figure 7 shows the driving
path. It can be seen for the sunny case that the colli-
sion happens at one point. Figure 8 shows the camera
view before the collision point. This validates the fact
that no matter how much training is done, the net-
work, sometimes, fails to predict correctly in strong
shadows.
Fog. To exploit the effect of variations in the simula-
tion, network trained for sunny data was tested in fog.
The left pathway in figure 9 shows that the vehicle
collided at different places. After analyzing the im-
age information at the collision points, one shown in
figure 10, it is observed that the contrast level tremen-
dously reduces, especially for green patches in the im-
ages. After training for fog data as well, no collision
was seen in the test shown on the right of figure 9.
Since no shadow exists in a foggy environment, the
Thorough Analysis and Reasoning of Environmental Factors on End-to-End Driving in Pedestrian Zones
499
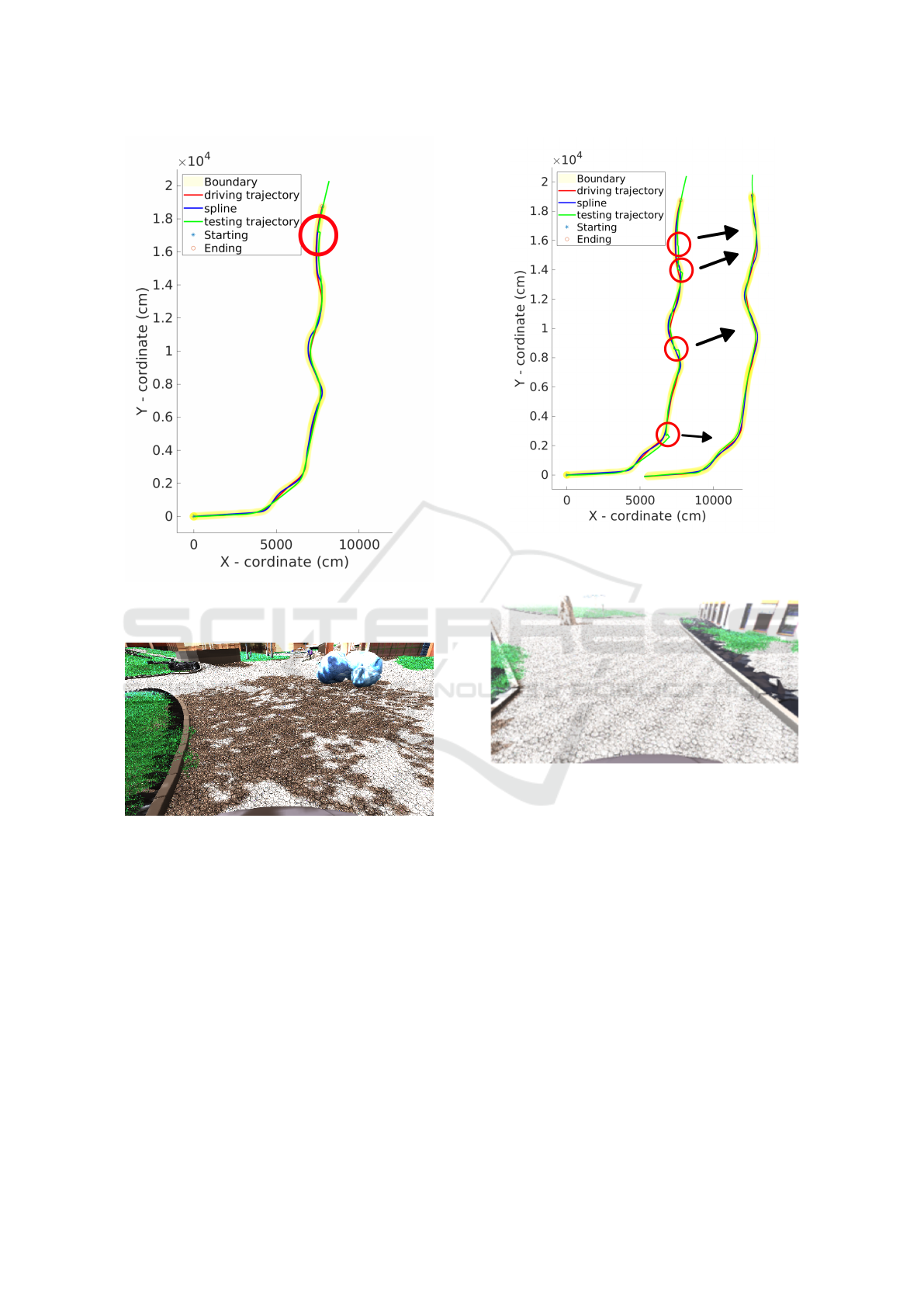
Figure 7: Testing in sunny environment in simulation. Red
cicle show the collision due to strong shadows shown in
figure 8.
Figure 8: Strong shadows during sunny condition.
collision happening in the sunny environment, due to
shadows, is circumvented.
All. Similar tests were also performed for dusk, rain,
and snow. The network drove without collision in
rain and snow after being trained for dusk only. This
establishes the fact that, mainly, the effect was the
brightness of the scene and not the interference due
to raindrops or snowflakes.
Pedestrians. After spawning pedestrians in the envi-
ronment as shown in figure 4, the driving for training
was done in such a way to sharply steer within the
path to avoid collision. Training for pedestrians was
done several times with different locations, orienta-
tions and number of pedestrians in a group. Here the
focus was to see whether the vehicle steers to avoid
Figure 9: Testing in fog. Left path is trained for sunny
class only with collision circled in red, whereas right path
is trained for fog which avoids all the collisions.
Figure 10: Effect of fog in the camera view.
the pedestrians and carefully pass by. Path including
pedestrians is shown in figure 11a. figure 11b is a
zoomed version of starting point shown in figure 11a.
The predicted trajectory shown in green forms small
curvatures to avoid pedestrians, which did not exist in
experiments without pedestrians.
Unseen. For unseen data, the vehicle reacted differ-
ently. One particular case is shown in figure 12 where
the vehicle is allowed to drive outside campus with
different textures. The vehicle follows the red line
shown in the figure 12. Since the system has only
learned to drive on the texture shown in figure 3, the
vehicle tries to follow the same texture instead of go-
ing straight on the dark texture. This asserts the im-
portance of texture on which the network is trained
on.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
500
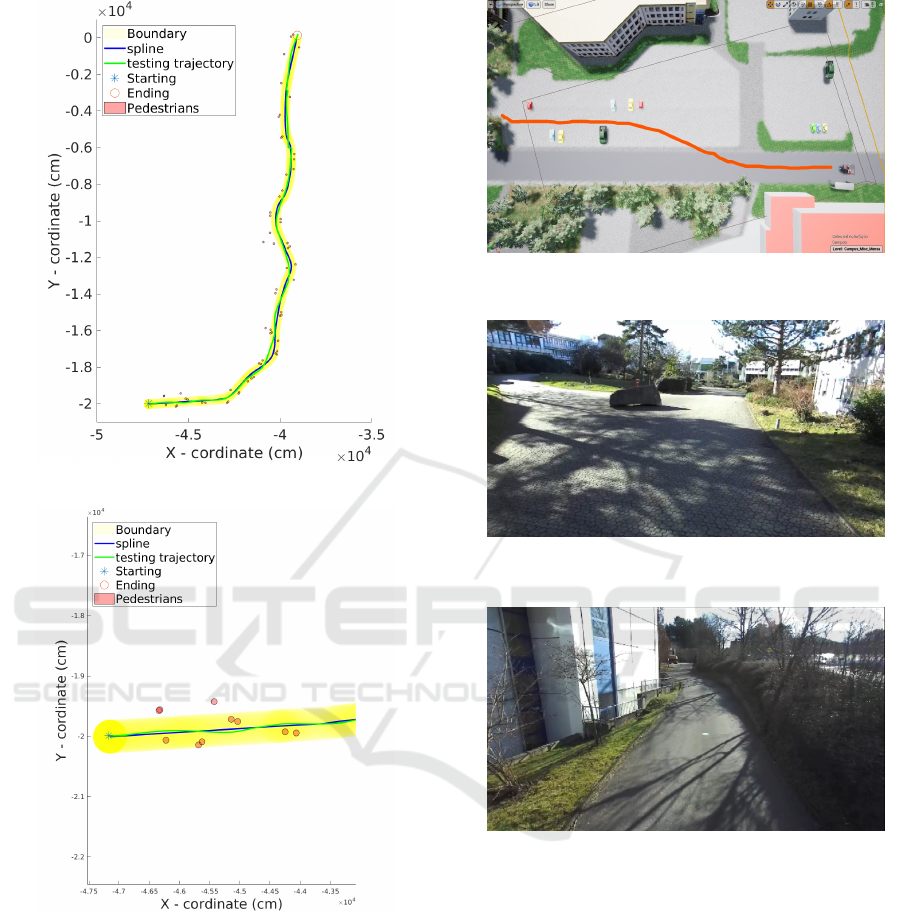
(a) Driving plot through pedestrians
(b) Zoomed area of the starting point in the above
plot.
Figure 11: Driving through pedestrians in the simulation.
(a) shows the pedestrian placement along the path, and (b) is
a zoomed version from the starting point to show the change
in driving prediction because of pedestrians.
5 REAL-WORLD
For the final work of this research, the objective was
to test the model on a real vehicle. After thorough
testing and successful driving in the simulation, it
was now suitable to test the system for a real vehi-
Figure 12: Testing in unseen and different texture in simu-
lation. Red line shows the driven trajectory.
Figure 13: A comparison image in actual campus with the
simulation shown in figure 9, but in sunny condition.
Figure 14: Testing the system on real unseen environment.
cle. Although the campus, sensor system, and vehicle
model were replicated in the simulation, there always
exists a gap between the real and simulated environ-
ment such as textures, lighting conditions, and ran-
dom pedestrian behavior. To explore if the end-to-end
driving overcomes this gap, the network was further
trained and tested for a real environment. The training
process was similar to the one defined for simulation.
The driverless vehicle shown in figure 1 was driven
several times in the campus with a joystick. The sen-
sor configuration was similar to the simulation.
In real tests, it was not possible to have a ground
truth and compare the testing results. Network perfor-
mance is reckoned from visual inspection. The net-
work performed well except for places with strong
shadows (similar problem to simulation). Also, it
Thorough Analysis and Reasoning of Environmental Factors on End-to-End Driving in Pedestrian Zones
501

drove precisely well in an unseen environment with
different textures and surroundings. A sample image
of the seen and unseen test area is shown in figure 13
and figure 14, respectively.
It is impossible to alter weather conditions or de-
fine pedestrian behavior in real world. The main fo-
cus of driving in a real environment was on the trained
path with people obstructing the view and driving in
an unseen environment.
6 CONCLUSIONS
This paper identifies factors affecting end-to-end driv-
ing for pedestrian zones. Initially, the work is done
in the simulation, later it is transferred to a real sys-
tem. A CNN network is designed to provide steer-
ing angles of a vehicle using RGB images from a
camera mounted on the roof of a minibus. The sys-
tem is tested in simulation with different weather
conditions and pedestrian locations. From the re-
sults, it can be seen that the end-to-end system pre-
dicts well in the driven path with different classes of
weather. If trained well for a particular environment
it shows propitious results, but relying alone on this
system for driving the vehicle is still not proposed;
it is not known when the system goes into a fail-
ure state. Overall, the reason behind the failure was
strong shadows. Also, the presence of a crowd made
the vehicle slightly steer. In future work, it is planned
to include depth images with extra output for handling
the shadows and intersections, respectively.
REFERENCES
Argall, B. D., Chernova, S., Veloso, M., and Browning, B.
(2009). A survey of robot learning from demonstra-
tion. Robotics and autonomous systems , 57(5):469–
483.
Bojarski, M., Del Testa, D., Dworakowski, D., Firner,
B., Flepp, B., Goyal, P., Jackel, L. D., Monfort,
M., Muller, U., Zhang, J., et al. (2016). End to
end learning for self-driving cars. arXiv preprint
arXiv:1604.07316.
Chang, T.-H., Wang, L.-S., and Chang, F.-R. (2009). A so-
lution to the ill-conditioned gps positioning problem
in an urban environment. IEEE Transactions on Intel-
ligent Transportation Systems, 10(1):135–145.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation. In
Proceedings of the European conference on computer
vision (ECCV), pages 801–818.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. proceedings of the ieee international con-
ference on computer vision. URL: http://openaccess.
thecvf. com/content ICCV 2017/papers/He Mask R-
CNN ICCV 2017 paper. pdf.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hubschneider, C., Bauer, A., Doll, J., Weber, M., Klemm,
S., Kuhnt, F., and Z
¨
ollner, J. M. (2017). Inte-
grating end-to-end learned steering into probabilistic
autonomous driving. In 2017 IEEE 20th Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC), pages 1–7. IEEE.
Jan, Q. H. and Berns, K. (2021). Safety-configuration of
autonomous bus in pedestrian zone. In VEHITS, pages
698–705.
Jan, Q. H., Kleen, J. M. A., and Berns, K. (2020a). Self-
aware pedestrians modeling for testing autonomous
vehicles in simulation. In VEHITS, pages 577–584.
Jan, Q. H., Kleen, J. M. A., and Berns, K. (2021). Sim-
ulated pedestrian modelling for reliable testing of au-
tonomous vehicle in pedestrian zones. In Smart Cities,
Green Technologies, and Intelligent Transport Sys-
tems: 9th International Conference, SMARTGREENS
2020, and 6th International Conference, VEHITS
2020, Prague, Czech Republic, May 2-4, 2020, Re-
vised Selected Papers 9, pages 290–307. Springer.
Jan, Q. H., Klein, S., and Berns, K. (2020b). Safe and
efficient navigation of an autonomous shuttle in a
pedestrian zone. In Advances in Service and Indus-
trial Robotics: Proceedings of the 28th International
Conference on Robotics in Alpe-Adria-Danube Re-
gion (RAAD 2019) 28, pages 267–274. Springer.
Lee, M.-j. and Ha, Y.-g. (2020). Autonomous driving con-
trol using end-to-end deep learning. In 2020 IEEE In-
ternational Conference on Big Data and Smart Com-
puting (BigComp), pages 470–473. IEEE.
Levinson, J., Askeland, J., Becker, J., Dolson, J., Held, D.,
Kammel, S., Kolter, J. Z., Langer, D., Pink, O., Pratt,
V., et al. (2011). Towards fully autonomous driving:
Systems and algorithms. In 2011 IEEE intelligent ve-
hicles symposium (IV), pages 163–168. IEEE.
Manaswi, N. (2018). Understanding and working with
keras deep learning with applications using python.
apress, berkeley.
Pomerleau, D. A. (1988). Alvinn: An autonomous land
vehicle in a neural network. Advances in neural infor-
mation processing systems, 1.
Sutton, R. S., Barto, A. G., et al. (1998). Introduction to
reinforcement learning, volume 135. MIT press Cam-
bridge.
Wolf, P., Groll, T., Hemer, S., and Berns, K. (2020). Evolu-
tion of robotic simulators: Using ue 4 to enable real-
world quality testing of complex autonomous robots
in unstructured environments. In SIMULTECH, pages
271–278.
Yurtsever, E., Lambert, J., Carballo, A., and Takeda, K.
(2020). A survey of autonomous driving: Common
practices and emerging technologies. IEEE access,
8:58443–58469.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
502
