
Molecule Builder: Environment for Testing Reinforcement Learning
Agents
Petr Hyner
1,2
, Jan H
˚
ula
2,3
and Mikol
´
a
ˇ
s Janota
3
1
Department of Informatics and Computers, Faculty of Science, University of Ostrava,
Ostrava, Czech Republic
2
Institute for Research and Applications of Fuzzy Modeling, University of Ostrava,
Ostrava, Czech Republic
3
Czech Technical University in Prague, Prague, Czech Republic
Keywords:
Reinforcement Learning, Subgoals, Environment, Agent.
Abstract:
We present a reinforcement learning environment designed to test agents’ ability to solve problems that can
be naturally decomposed using subgoals. This environment is built on top of the PyVGDL game engine and
enables to generate problem instances by specifying the dependency structure of subgoals. Its purpose is to
enable faster development of Reinforcement Learning algorithms that solve problems by proposing subgoals
and then reaching these subgoals.
1 INTRODUCTION
This contribution describes a minimalistic environ-
ment called Molecule Builder whose purpose is to test
the abilities of Reinforcement Learning (RL) agents.
Concretely, this environment tests the agents’ ability
to solve problems that require the completion of many
subgoals before reaching the final state. Reinforce-
ment learning methods can solve problems of surpris-
ing difficulty (Silver et al., 2017; Mirhoseini et al.,
2021). Nevertheless, they are not very effective in
terms of sample complexity. They require an exten-
sive computational budget for trial and error explo-
ration to discover an effective behaviour for a given
problem. If the goal state (or a state with a reward)
first requires the completion of several subgoals that
depend on each other, it is possible that the agent will
never reach such a state and, therefore, will not obtain
any learning signal.
This attribute is present in many real-life scenar-
ios, which should justify the search for novel ap-
proaches that relate to sequential decision-making
problems. It is a mark of human cognition that we cre-
ate hierarchical plans when we try to solve a complex
and novel task. Additionally, factorization of complex
structures into more simple structures is an essential
tool in problem solving.
We believe that RL agents should also be equipped
with this ability. To develop such agents/algorithms,
it is necessary to have a benchmark environment that
naturally contains the concept of subgoals first. Our
motivation for the work presented here was to de-
velop such a benchmark that would provide challeng-
ing problems for the current generation of RL algo-
rithms. Such a benchmark should be as minimalistic
as possible, while the environment should be easily
configurable by anyone who considers implementing
an agent to solve it.
The environment presented consists of a random
generator of problem instances in which the goal of
the agent is to build a structure from simpler build-
ing blocks. The structure could contain substructures,
and the construction of these substructures represents
a natural subgoal. Moreover, the building blocks may
be blocked by various obstacles that may be destroyed
only by the corresponding structures. Therefore, each
problem instance could be created from a dependency
graph that reflects the order in which the individual
structures could be built.
The text is structured as follows. Section 2 de-
scribes fundamental concepts in reinforcement learn-
ing and provides motivation for developing agents
that explore the state-space by proposing subgoals to
themselves. Section 3 provides a high-level overview
of the Molecule Builder environment. Section 4
describes the generative model for the problem in-
stances, and the last two Sections 5 and 6 are devoted
to related work and conclusion.
450
Hyner, P., H ˚ula, J. and Janota, M.
Molecule Builder: Environment for Testing Reinforcement Learning Agents.
DOI: 10.5220/0012257900003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 450-458
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2 SUBGOALS IN
REINFORCEMENT LEARNING
The field of Reinforcement Learning is focused on
methods for sequential decision-making problems.
These problems are formalized by a Markov decision
process (MDP), which is a 4-tuple (S, A, P
a
, R
a
).
• S is a set of states called the state space
• A is a set of actions called the action-space
• P
a
(s, s
′
) = Pr(s
t+1
= s
′
| s
t
= s, a
t
= a) is the prob-
ability that action a in state s at time t will lead to
state s
′
at time t + 1
• R
a
(s, s
′
) is the immediate reward (or expected im-
mediate reward) received after transitioning from
state s to state s
′
, due to action a
Many problems can be formulated as MDPs. For
example, many examples can be found in combina-
torial optimization, with the canonical example be-
ing the Travelling Salesman Problem (TSP) (Gavish
and Graves, 1978). In the TSP, we have a directed
(weighted) graph, and the goal is to find the shortest
cycle, which visits all the vertices. Here the state s ∈ S
can be represented as a set of already visited vertices,
a set of still non-visited vertices, and the vertex the
agent is currently in. The set of actions A available in
a given state corresponds to the choice over the set of
non-visited vertices. The transitions are deterministic
and, therefore, P
a
(s, s
′
) = 1 only for one (consistent)
triple (a, s, s
′
) and 0 otherwise. The rewards could be,
for example, set in such a way that the agent receives
a non-zero reward only for the action which closes the
cycle. The value of the reward would be equal to the
length of the cycle.
To solve a given MDP means to find a policy func-
tion π : S → A (which can be potentially probabilistic)
that maximizes the expected cumulative reward:
E
"
∞
∑
t=0
γ
t
R
a
t
(s
t
, s
t+1
)
#
. (1)
In this expression, E is the expected value, a
t
is
the action sampled according to the policy π and s
t+1
is the state sampled according to Pr(s
t+1
| s
t
, a
t
). The
expected value E is over the randomness in these two
variables.
In practice, we do not necessarily need to find the
optimal policy π
∗
, which maximizes this expression.
It is often enough to find any policy that is ”good
enough.”
Various methods exist to find such policy (Mnih
et al., 2013; Sutton et al., 1999a) but the general idea
is that the agent usually starts to explore the state
space by choosing actions according to a random pol-
icy, and this policy is repeatedly updated according to
rewards that the agent observes. If the agent does not
observe any reward during its exploration, it cannot
learn anything. This problem of sparse rewards is of-
ten approached by reward shaping, where additional
(intermediate) rewards are given to the agent to guide
it towards a more desirable behaviour. Creating these
additional rewards often requires domain expertise.
The policy function can take various forms. In the
simplest case, when the state space is small, it can
be a lookup table. It can also be determined by an-
other function called value function, which, in simple
words, measures how valuable it is for the agent to
be in a given state. When the agent has access to this
value function and the (probabilistic) transition func-
tion, it can choose the action which leads to a state
with the highest (expected) value.
Very often, the policy/value function is repre-
sented by a neural network which is learned dur-
ing the exploration process. Sometimes, the agent
also needs to learn the transition function, sometimes
called a world model, because it may not be known
(i.e. in robotics.)
When the agent makes decisions according to the
learned value function, which may be imprecise, the
quality of each decision is often considerably im-
proved if the agent first simulates many possible fu-
ture trajectories (sequences of actions and states) and
observes which states they lead to before it decides
how to act. This is known under the term model pre-
dictive control (MPC) and it vaguely resembles cer-
tain cognitive processes of humans and other animals,
which can run mental simulations before they decide
which actions to take.
Nevertheless, the crucial difference between MPC
and human planning abilities is that our mental simu-
lations do not necessarily follow the low-level dynam-
ics of the environment. For example, when we want to
safely travel to a different country, we do not imagine
what our body will be doing at every moment of the
journey. Instead, we plan over high-level actions and
states such as ”buy a ticket” or ”get to the airport”.
We believe that this ability to freely move in space
and time in our minds is crucial for our effectiveness
in problem-solving and that figuring out how to en-
rich RL agents with this ability will allow us to solve
much more complicated problems than the ones we
are currently able to solve. This motivated us to cre-
ate a minimalistic environment for testing RL agents,
which contain a clear notion of subgoals and where
the dependency graph of subgoals is easily control-
lable.
Molecule Builder: Environment for Testing Reinforcement Learning Agents
451
3 THE MOLECULE BUILDER
ENVIRONMENT
We have built the Molecule builder environment on
top of the Video Game Description Language (con-
cretely, the Python implementation PyVGDL (Schaul,
2013; Vereecken, 2018), which was designed to al-
low for quick prototyping of test environments for AI
agents.
As the name suggests, the basic principle of
this game/environment is to build ”molecules” from
”atoms.” The agent is placed in a simple grid world
that contains rooms and corridors, and the atoms are
scattered in the rooms. In each game, the goal is to as-
semble a particular molecule that may consist of sub-
molecules. Moreover, some corridors may be blocked
by obstacles that may prevent the agent from access-
ing the required atoms needed to construct the tar-
get molecule. The given obstacle can be destroyed
by a different molecule, and the construction of this
molecule naturally represents a subgoal in this game.
There may be several such subgoals that may de-
pend on each other and the dependency graph of these
molecules constitutes a high-level structure of each
game instance. The action space A consists of four
actions: move up, move down, move left and move
right.
Our framework enables the generation of games
of desired complexity by specifying this dependency
graph. This control over the complexity of the prob-
lem allows us to create curricula of problems in which
the agent can first learn to assemble simple molecules
and then proceed to more complex games in which
the assembly of these molecules represents a subgoal.
Each game consists of a layout that represents the ini-
tial state of the game (the position of walls, atoms, ob-
stacles, and the agent). It also consists of a definition
file that describes the default behaviour of individ-
ual entities in the game, their interactions, and their
appearance (each entity is represented by an ASCII
symbol). The main part in the definition file is the in-
teraction set, which dictates how the molecules could
be built from atoms and sub-molecules.
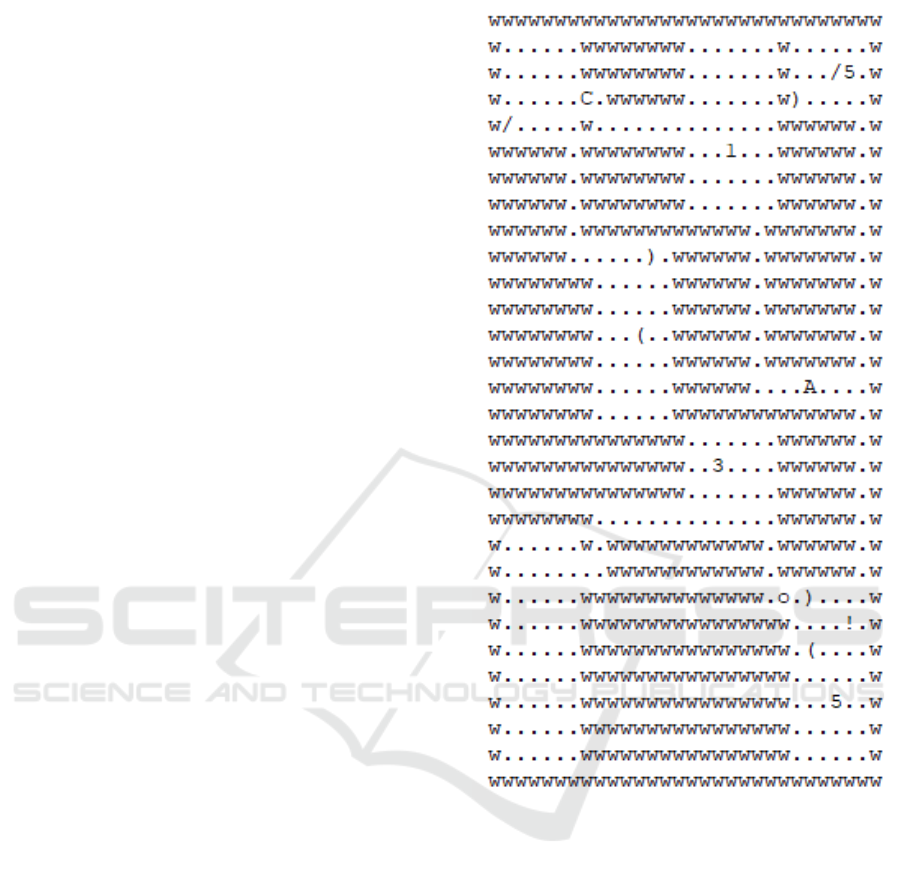
3.1 The Layout of the Game Instance
Figure 1 shows a randomly sampled layout of a game
with many atoms scattered throughout the rooms.
Each symbol represents a given entity defined inside
the SpriteSet block and mapped in the LevelMapping
block in the definition file shown in Figure 2. In this
layout, the dots represent a floor where the agent can
move freely. The letter w represents a wall through
which the agent cannot move. Other symbols, such
Figure 1: An example of a simplified layout.
as 3, 5, /, ) etc., are the atom symbols. Several
other types of symbols (C, o) correspond to obsta-
cles. These symbols are placed inside corridors that
connect two rooms and the agent cannot pass through
them. Finally, the symbol A corresponds to the agent.
Here, we describe how such a game instance can
be solved. The goal is to build a target molecule con-
sisting of atoms ), (, /, 5, 3. As can be seen in Figure 1,
there are obstacles that prevent the agent from reach-
ing some parts of the environment. In detail, there are
three separate parts of the environment that are inac-
cessible without the removal of obstacles. Part 1, is
the part where the agent starts and contains atoms ),
(, /, 5, !. Part 2 contains symbols ), (, / and could be
accessed from part 1 after removing the obstacle C.
Finally, part 3 contains atom 3 and can be accessed
from part 1 after removing the obstacle o.
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
452

Figure 2: An example of a simplified definition file.
The agent needs to access part 3 to collect the
symbol 3 needed to build the target molecule. The
obstacle o can be destroyed by a molecule that can be
built from atoms ), (, /. If the agent uses the atoms ),
(, / present in part 1 to destroy the obstacle o, then it
will not be able to build the target molecule for which
these atoms are required. Therefore, it also needs to
reach part 2. To destroy the obstacle C, it is necessary
to build a molecule from atoms 1,5,! (the agent must
learn this knowledge by playing different instances of
the game).
Here are the high-level steps by which the agent
might solve the game.
1. The agent starts in part 1 and collects atoms 1, 5,
!.
2. The agent destroys the obstacle C with the created
molecule and gathers atoms /, ), ( in part 2.
3. The agent destroys the obstacle o with the created
molecule /, ), ( and gathers the atom 3.
4. The agent returns to part 1 to collect the atoms /,
), (, 5, and this finishes the game.
Figure 3 shows the molecules that the agent builds
in this game instance. Note that the order of collecting
atoms for a given molecule is given by its correspond-
ing tree.
3.2 The Definition File of the Game
Instance
Figure 2 shows a (simplified) definition file with only
one atom. The syntax is simple to understand, as
there are only four different types of definitions avail-
able (SpriteSet, LevelMapping, InteractionSet, Termi-
nationSet). The SpriteSet code block defines the en-
tities of the game, their names, properties, and graph-
ics. LevelMapping then assigns a unique symbol to
each entity defined above. The InteractionSet spec-
ifies what happens when two defined entities meet.
Multiple types of interactions are possible, and these
correspond to the event that occurs when the two en-
tities meet. The most commonly used events are the
killSprite and stepBack events. A large number of
(simpler) games can be built using these two events
only. Furthermore, the interaction transformTo is also
very helpful in cases where we need to change the af-
fected entity to a different entity. In our case, we use
this event to transform multiple atoms into molecules
or sub-molecules. Finally, the TerminationSet defines
condition(s) of what must happen in the environment
for the game to end.
For a detailed description of the syntax of the
definition files, see the original PyVGDL publication
(Schaul, 2013).
Our framework enables us to generate a practi-
cally infinite number of such games that run very fast
and can be used to develop RL agents that can solve
problems by proposing subgoals to themselves. An
example of a specific environment’s definition file and
layout generated by our framework can be found in
Appendix A, where both the definition and layout cor-
respond to one environment instance.
4 GENERATIVE MODEL FOR
GAME INSTANCES
In the previous section, we have established how the
Molecule Builder environment works and what is the
goal of the agent. In this section, we describe how
each instance of the game is generated. More specif-
ically, how the final layout and definition files men-
tioned in Section 3 are produced.
4.1 Generation of the Layout
The generation of layouts occurs in several steps. The
first step includes the generation of molecule graphs,
which describe how each molecule can be built. Fig-
ure 3 shows graphs for three different molecules that
are used in the instance depicted in Figure 1.
Figure 3: The structure of molecules that are build during
the game shown in Figure 1. The subtrees correspond to
sub-molecules which need to be built first, before merging
them with other atoms.
As shown, each molecule corresponds to a tree,
Molecule Builder: Environment for Testing Reinforcement Learning Agents
453

where the leaf nodes contain symbols (these are the
atoms that the agent can collect). The sub-trees corre-
spond to sub-molecules. For example, for the leftmost
graph, the agent first needs to create a sub-molecule
from atoms ),( before it can compose it with atom / or
the second sub-molecule which is built from atoms
5,3. In total, we instantiate 20 unique atoms from
which 20 unique sub-molecules are built. From these
atoms and sub-molecules, 50 unique molecules are
built. These are generated only once and used in each
game instance. One particular molecule is always
used as the target molecule for each game.
To generate the concrete game instance, we first
sample the number of molecules n that will be re-
quired to finish the game. Then we sample n random
molecules from the 50 available molecules and create
a dependency graph determining the order in which
these molecules could be built.
Once we have this graph, we generate the layout
by creating n parts with a variable number of rooms
in each part and connect these rooms by corridors
where each corridor connecting two different parts
is blocked by an obstacle. Finally, we position the
atoms and the agent in the rooms in such a way that
the molecules can be built in the order dictated by the
dependency graph.
4.2 Generation of the Definition File
The generation of the definition file is dependent only
on the dependency graph, which contains a descrip-
tion of the molecules used at its vertices. We first
instantiate the SpriteSet and LevelMapping by creat-
ing an entity represented by a unique symbol for each
atom, sub-molecule and molecule. Then we instanti-
ate the rules of how these atoms interact with each
other. For certain atoms/sub-molecules/molecules,
nothing happens when they touch each other, and
these interactions are handled by the stepBack event.
For each pair of atoms/sub-molecules that can be
combined, we create two rules. One rule uses the
killSprite event to remove one of these entities, and
the second rule uses the transformTo event to trans-
form the second entity into the entity corresponding
to its composition. Additionally, we instantiate rules
determining what happens when these atoms/sub-
molecules/molecules interact with obstacles, walls, or
the agent.
The definition of the game instance is complete by
adding the TerminationSet block, which is the same
for each game and checks whether the target molecule
has been built.
5 RELATED WORK
5.1 Reinforcement Learning with
Subgoals
Originally, subgoals have been investigated in (Sut-
ton et al., 1999b). Many articles have been published
on the topic of subgoals or, more generally, on goal-
oriented reinforcement learning, such as (Czechowski
et al., 2021; Chane-Sane et al., 2021; Nasiriany et al.,
2019; Eysenbach et al., 2019; Zawalski et al., 2023)..
All of these methods have been studied on problems
that are either too simplistic (the subgoal can cor-
respond to moving the agent from one room to the
other) or do not contain a clear notion of a subgoal
(i.e., solving a Rubik’s cube). A closely related topic,
called Hierarchical Reinforcement Learning, studies
RL algorithms that use the so-called options (Vezhn-
evets et al., 2017; Barto and Mahadevan, 2003; Sut-
ton et al., 1999b; Precup and Sutton, 2000; Aubret
et al., 2019). These are high-level actions that con-
sist of many low-level ones. Most option-based algo-
rithms were developed and tested on very basic envi-
ronments, and therefore our environment can be used
as a challenging benchmark for these algorithms.
5.2 Minimalistic Reinforcement
Learning Environments
During the last decade, several frameworks have been
developed for designing RL environments. They
range from very complex ones, which are based on 3D
rendering engines (Beattie et al., 2016; Juliani et al.,
2019), through simulators of Atari games (Bellemare
et al., 2013), to ones with minimalistic ASCII graph-
ics such as MiniHack (Samvelyan et al., 2021) or
PyVGDL (Schaul, 2013). We decided to build our
environment on top of the minimalistic PyVGDL be-
cause we are interested only in testing the agent’s abil-
ity to solve problems that can be decomposed into
subgoals and we view the ability to deal with com-
plex visual patterns as a separate issue.
6 CONCLUSION
We presented a minimalistic RL environment which
is designed to test agents’ ability to solve problems
that can be naturally decomposed into subgoals. We
believe that the ability to solve problems by first set-
ting a subgoal and then achieving this subgoal is cru-
cial for humans and will be crucial for RL agents in
the future. We believe that the environment presented
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
454

will provide a shared testing ground for researchers
interested in this topic. In future work, we plan to
release algorithms developed using this environment
that will explore the state space by proposing subgoals
to themselves.
ACKNOWLEDGEMENT
This scientific article is part of the RICAIP project
that has received funding from the European Union’s
Horizon 2020 research and innovation programme
under grant agreement No 857306. The results were
supported by the Ministry of Education, Youth and
Sports within the dedicated program ERC CZ under
the project POSTMAN no. LL1902.
REFERENCES
Aubret, A., Matignon, L., and Hassas, S. (2019). A sur-
vey on intrinsic motivation in reinforcement learning.
CoRR, abs/1908.06976.
Barto, A. G. and Mahadevan, S. (2003). Recent advances
in hierarchical reinforcement learning. Discrete Event
Dynamic Systems, 13(4):341–379.
Beattie, C., Leibo, J. Z., Teplyashin, D., Ward, T., Wain-
wright, M., K
¨
uttler, H., Lefrancq, A., Green, S.,
Vald
´
es, V., Sadik, A., Schrittwieser, J., Anderson, K.,
York, S., Cant, M., Cain, A., Bolton, A., Gaffney,
S., King, H., Hassabis, D., Legg, S., and Petersen, S.
(2016). DeepMind lab.
Bellemare, M. G., Naddaf, Y., Veness, J., and Bowling, M.
(2013). The arcade learning environment: An evalua-
tion platform for general agents. 47:253–279.
Chane-Sane, E., Schmid, C., and Laptev, I. (2021). Goal-
conditioned reinforcement learning with imagined
subgoals. CoRR, abs/2107.00541.
Czechowski, K., Odrzyg
´
ozdz, T., Zbysinski, M., Zawalski,
M., Olejnik, K., Wu, Y., Kucinski, L., and Milos, P.
(2021). Subgoal search for complex reasoning tasks.
CoRR, abs/2108.11204.
Eysenbach, B., Salakhutdinov, R., and Levine, S. (2019).
Search on the replay buffer: Bridging planning and
reinforcement learning.
Gavish, B. and Graves, S. C. (1978). The travelling sales-
man problem and related problems. Publisher: Mas-
sachusetts Institute of Technology, Operations Re-
search Center.
Juliani, A., Khalifa, A., Berges, V.-P., Harper, J., Teng, E.,
Henry, H., Crespi, A., Togelius, J., and Lange, D.
(2019). Obstacle tower: A generalization challenge
in vision, control, and planning.
Mirhoseini, A., Goldie, A., Yazgan, M., Jiang, J. W.,
Songhori, E., Wang, S., Lee, Y.-J., Johnson, E.,
Pathak, O., Nazi, A., et al. (2021). A graph place-
ment methodology for fast chip design. Nature,
594(7862):207–212.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing.
Nasiriany, S., Pong, V. H., Lin, S., and Levine, S. (2019).
Planning with goal-conditioned policies.
Precup, D. and Sutton, R. S. (2000). Temporal Abstrac-
tion in Reinforcement Learning. phdthesis. ISBN:
0599844884.
Samvelyan, M., Kirk, R., Kurin, V., Parker-Holder, J.,
Jiang, M., Hambro, E., Petroni, F., K
¨
uttler, H.,
Grefenstette, E., and Rockt
¨
aschel, T. (2021). Mini-
Hack the Planet: A Sandbox for Open-Ended Rein-
forcement Learning Research.
Schaul, T. (2013). A video game description language for
model-based or interactive learning. In Proceedings of
the IEEE Conference on Computational Intelligence
in Games, Niagara Falls. IEEE Press.
Silver, D., Hubert, T., Schrittwieser, J., Antonoglou, I., Lai,
M., Guez, A., Lanctot, M., Sifre, L., Kumaran, D.,
Graepel, T., Lillicrap, T., Simonyan, K., and Hass-
abis, D. (2017). Mastering chess and shogi by self-
play with a general reinforcement learning algorithm.
Sutton, R. S., McAllester, D., Singh, S., and Mansour, Y.
(1999a). Policy gradient methods for reinforcement
learning with function approximation. In Solla, S.,
Leen, T., and M
¨
uller, K., editors, Advances in Neu-
ral Information Processing Systems, volume 12. MIT
Press.
Sutton, R. S., Precup, D., and Singh, S. (1999b). Between
mdps and semi-mdps: A framework for temporal ab-
straction in reinforcement learning. Artificial Intelli-
gence, 112(1):181–211.
Vereecken, R. (2018). PyVGDL 2.0. original-date: 2018-
07-10T16:54:41Z.
Vezhnevets, A. S., Osindero, S., Schaul, T., Heess, N.,
Jaderberg, M., Silver, D., and Kavukcuoglu, K.
(2017). Feudal networks for hierarchical reinforce-
ment learning. CoRR, abs/1703.01161.
Zawalski, M., Tyrolski, M., Czechowski, K., Stachura, D.,
Piekos, P., Odrzyg
´
o
´
zd
´
z, T., Wu, Y., Kuci
´
nski, L., and
Miło
´
s, P. (2023). Fast and Precise: Adjusting Planning
Horizon with Adaptive Subgoal Search.
Molecule Builder: Environment for Testing Reinforcement Learning Agents
455

APPENDIX A
Sampled Environment
BasicGame block_size=10
SpriteSet
background > Immovable randomling=0.9 img=oryx/oor3 hidden=True
avatar > MovingAvatar img=oryx/knight1
wall > Immovable autoling=true img=oryx/wall3
movable >
1 > Passive img=atom_sprites/alienShotgun_0.png
3 > Passive img=atom_sprites/belt1.png
4 > Passive img=atom_sprites/book1.png
5 > Passive img=atom_sprites/bookDown.png
6 > Passive img=atom_sprites/bookUp.png
7 > Passive img=atom_sprites/boots1.png
8 > Passive img=atom_sprites/bow1.png
10 > Passive img=atom_sprites/bullet1.png
16 > Passive img=atom_sprites/buery1.png
100113 > Passive img=atom_sprites/candle1.png
100115 > Passive img=atom_sprites/cape1.png
20 > Passive img=atom_sprites/chair1.png
100117 > Passive img=atom_sprites/chicken.png
100118 > Passive img=atom_sprites/city1.png
10040 > Passive img=atom_sprites/cloak1.png
10059 > Passive img=atom_sprites/diamond1.png
10062 > Passive img=atom_sprites/eggcracked.png
10067 > Passive img=atom_sprites/eye1.png
10070 > Passive img=atom_sprites/ag1.png
10072 > Passive img=atom_sprites/goldsack.png
10074 > Passive img=atom_sprites/heart1.png
10075 > Passive img=atom_sprites/helmet1.png
obstacle >
101118 > Immovable img=obstacle_sprites/barrel1.png
11067 > Immovable img=obstacle_sprites/barrel2.png
11075 > Immovable img=obstacle_sprites/block1.png
LevelMapping
A > background avatar
w > wall
. > background
β > background 1
δ > background 3
ε > background 4
ζ > background 5
η > background 6
θ > background 7
ι > background 8
λ > background 10
ρ > background 16
ѥ > background 100113
Ѧ > background 100115
υ > background 20
ѧ > background 100117
Ѩ > background 100118
Ϸ > background 10040
Figure 4: Part 1: Sampled environment definition file.
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
456

BasicGame block_size=10
SpriteSet
background > Immovable randomling=0.9 img=oryx/oor3 hidden=True
avatar > MovingAvatar img=oryx/knight1
wall > Immovable autoling=true img=oryx/wall3
movable >
1 > Passive img=atom_sprites/alienShotgun_0.png
3 > Passive img=atom_sprites/belt1.png
4 > Passive img=atom_sprites/book1.png
5 > Passive img=atom_sprites/bookDown.png
6 > Passive img=atom_sprites/bookUp.png
7 > Passive img=atom_sprites/boots1.png
8 > Passive img=atom_sprites/bow1.png
10 > Passive img=atom_sprites/bullet1.png
16 > Passive img=atom_sprites/buery1.png
100113 > Passive img=atom_sprites/candle1.png
100115 > Passive img=atom_sprites/cape1.png
20 > Passive img=atom_sprites/chair1.png
100117 > Passive img=atom_sprites/chicken.png
100118 > Passive img=atom_sprites/city1.png
10040 > Passive img=atom_sprites/cloak1.png
10059 > Passive img=atom_sprites/diamond1.png
10062 > Passive img=atom_sprites/eggcracked.png
10067 > Passive img=atom_sprites/eye1.png
10070 > Passive img=atom_sprites/ag1.png
10072 > Passive img=atom_sprites/goldsack.png
10074 > Passive img=atom_sprites/heart1.png
10075 > Passive img=atom_sprites/helmet1.png
obstacle >
101118 > Immovable img=obstacle_sprites/barrel1.png
11067 > Immovable img=obstacle_sprites/barrel2.png
11075 > Immovable img=obstacle_sprites/block1.png
LevelMapping
A > background avatar
w > wall
. > background
β > background 1
δ > background 3
ε > background 4
ζ > background 5
η > background 6
θ > background 7
ι > background 8
λ > background 10
ρ > background 16
ѥ > background 100113
Ѧ > background 100115
υ > background 20
ѧ > background 100117
Ѩ > background 100118
Ϸ > background 10040
Figure 5: Part 2: Sampled environment definition file.
Molecule Builder: Environment for Testing Reinforcement Learning Agents
457
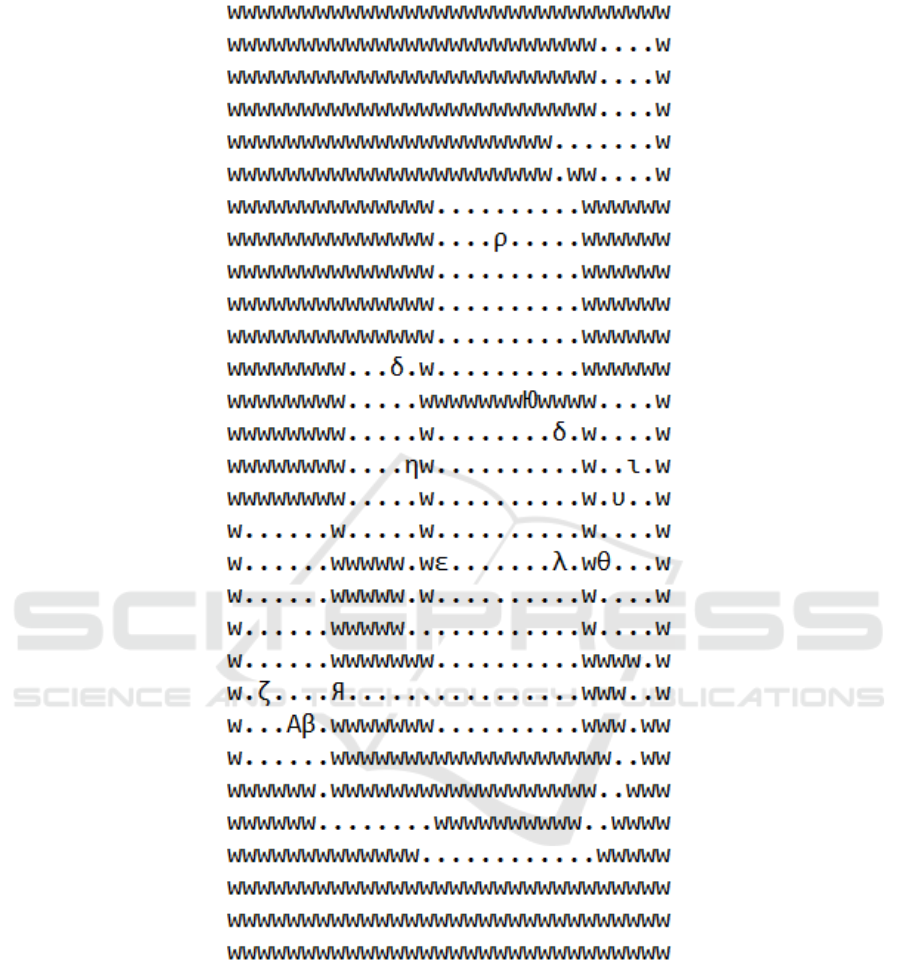
Figure 6: Sampled environment layout.
NCTA 2023 - 15th International Conference on Neural Computation Theory and Applications
458
