
From Point Cloud Perception Toward People Detection
Assia Belbachir
1,2 a
, Antonio M. Ortiz
1 b
, Atle Aalerud
1 c
and Ahmed Nabil Belbachir
1 d
1
NORCE Norwegian Research Centre, Norway
2
Sorbonne Universit
´
e, LIP6-UMR 7606 CNRS, France
Keywords:
Point Cloud, LiDAR, People Detection.
Abstract:
Point clouds have become significant data inputs for 3D representation, enabling accurate analysis of 3D
scenes and objects. People detection from point clouds is a challenging task due to data sparsity, irregular-
ity, occlusion, and real-time detection constraints. Existing methods based on handcrafted features or deep
learning have limitations in handling occlusions, pose variations, and fast detection. This paper introduces a
Random Forest classifier for people detection in point clouds, aiming to achieve both accuracy and fast perfor-
mance. The point cloud data are acquired using a multi-point LiDAR system. First experiments demonstrate
the effectiveness of the approach and its efficient detection compared to Multiple Layer Perceptron (MLP) in
our collected Dataset.
1 INTRODUCTION
Point cloud perception has emerged as a crucial re-
search area in computer vision, enabling accurate
analysis and understanding of 3D scenes and objects.
With the increasing availability of depth sensors such
as LiDAR and RGB-D cameras, point clouds have be-
come a popular representation for capturing the ge-
ometric structure of the environment. A key appli-
cation of point cloud perception is people detection,
which plays an important role in various domains in-
cluding autonomous driving, surveillance, and human
robot interaction, among others.
People detection from point clouds is a challeng-
ing task. The inherent sparsity, irregularity, and occlu-
sion present in point clouds make accurate detection
of humans a complex problem. Existing approaches
often rely on handcrafted features or deep learning-
based methods that primarily focus on local geometric
patterns or global contextual information. However,
these approaches have limitations in dealing with oc-
clusion, pose variations, and cluttered scenes, leading
to sub optimal performance.
Two main methods are used for people detection:
(1) handcrafted feature-based methods and (2) deep
a
https://orcid.org/0000-0002-1294-8478
b
https://orcid.org/0000-0002-7145-8241
c
https://orcid.org/0000-0001-6462-235X
d
https://orcid.org/0000-0001-9233-3723
learning-based methods. Handcrafted feature-based
methods extract geometric features, such as local sur-
face normals, curvatures, or multi-scale shape de-
scriptors, to represent the local characteristics of point
neighborhoods. These methods can use clustering or
classification algorithms to differentiate humans from
other objects or background. While these approaches
have shown promising results in some scenarios, they
struggle to handle complex occlusion patterns, pose
variations, and real-time detection.
Recently, deep learning-based methods have
gained significant attention, leveraging the ability of
deep neural networks to learn features directly from
point clouds. These methods often employ archi-
tectures such as PointNet (Qi et al., 2017b), Point-
Net++ (Qi et al., 2017d), or Graph Convolutional Net-
works (GCNs) (Li et al., 2018a) to capture local and
global contextual information. Deep learning-based
approaches have shown superior performance in han-
dling complex scenes, occlusion, and pose variations.
However, they may suffer from high computational
costs and require large amounts of labeled training
data.
The Random Forest classifier (RFC) is a well-
established machine learning algorithm with a strong
track record of high performance across various do-
mains. While the field of machine learning continu-
ally evolves, the Random Forest classifier remains a
robust and reliable choice for classification tasks in
term of scalability and reactivity (Cutler et al., 2007).
520
Belbachir, A., Ortiz, A., Aalerud, A. and Belbachir, A.
From Point Cloud Perception Toward People Detection.
DOI: 10.5220/0012258800003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 520-526
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Before training our model for RFC, we removed the
ground information. We conducted a comparison be-
tween the Random Forest Classifier (RFC) and the
Multi-Layer Perceptron (MLP) through various eval-
uation metrics using the datasets.
The objective of this paper is twofold: first, it
applies Random Forest classification mechanisms for
people detection from a point cloud perception, and
going one step beyond, the use of a trained model
enables real-time detection of people. The point
cloud perception used as input for the Random For-
est classification is acquired through a multi-point Li-
DAR (Aalerud et al., 2020) that uses a combination
of multiple mirrors to increase the number of detected
points, thus increasing the resolution and data quality.
The remainder of this paper is organised as fol-
lows: Section 2 reviews the related State of the Art
and presents the main drawbacks of previous work;
Section 3 details the fundamentals of the proposed ap-
proach and the main novelties of this work; Section 4
presents the experiments and results highlighting the
obtained performance; and finally, Section 5 presents
some conclusions and future work, paving the way to
the application of the proposed approach in diverse
domains.
2 STATE OF THE ART
The literature presents multiple Point Cloud meth-
ods that can be classified into seven categories: (i)
Point Cloud Segmentation (such as PointNet (Qi
et al., 2017c), PointNet++ (Qi et al., 2017e), and
PointCNN (Li et al., 2018b)), (ii) Point Cloud Reg-
istration (Huang et al., 2021), (iii) Point Cloud Re-
construction (Lin et al., 2018), (iv) Point Cloud Clas-
sification (Uy et al., 2019), (v) Point Cloud Denois-
ing (Javaheri et al., 2017), (vi) Point Cloud Genera-
tion (Yang et al., 2019a), and (vii) Point Cloud Com-
pression (Cao et al., 2019).
This paper focuses on people detection, which in-
volves point cloud segmentation followed by classifi-
cation.
The work in (Dai et al., 2021) presents MV3D,
a multi-view 3D object detection network that uti-
lizes point cloud data for autonomous driving appli-
cations. It combines bird’s-eye view and front view
representations with 3D voxel-based feature learning.
MV3D achieves state-of-the-art performance in ob-
ject detection tasks, including people detection. How-
ever, MV3D’s computational complexity and reliance
on multi-view inputs may limit its real-time applica-
bility in resource-constrained scenarios.
Frustum PointNets (Qi et al., 2017a) introduces a
frustum-based approach for 3D object detection, in-
cluding people detection, using RGB-D data. The
method extracts point features within frustum regions
and employs PointNet to classify and regress object
properties. Frustum PointNets demonstrates superior
performance on challenging datasets. While effective,
the frustum-based approach may suffer from incom-
plete object detection when objects extend outside the
frustum, limiting its performance in scenarios with
large-scale occlusion.
The authors of PointRCNN (Shi et al., 2019) pro-
pose a two-stage framework for 3D object detection
that generates proposals and performs accurate de-
tection using point cloud data. The method lever-
ages region proposal network (RPN) and PointNet++
for feature extraction, achieving state-of-the-art re-
sults in various object detection benchmarks, includ-
ing people detection. However, the effectiveness of
this method relies on region proposal, which may
limit its efficiency for real-time applications. Addi-
tionally, it may struggle with densely packed scenes
due to limited coverage of the proposed solution.
STD (Yang et al., 2019b) is a sparse-to-dense 3D
object detection framework that reconstructs dense
and complete point clouds from sparse input. The
method leverages depth completion and 3D feature
learning to improve object detection accuracy. STD
achieves competitive results in object detection, in-
cluding human detection tasks. However, STD’s re-
liance on depth completion may introduce errors in
scenes with challenging depth estimation or limited
sensor capabilities.
Complex-YOLO (Simon et al., 2018) proposes a
real-time 3D object detection framework for point
clouds. The method employs complex convolu-
tional layers and anchor-based predictions to achieve
efficient and accurate object detection. Complex-
YOLO demonstrates competitive performance on var-
ious datasets. However, it may struggle with highly
occluded objects due to limitations in the anchor-
based prediction scheme.
Another technique introduces Histograms of Ori-
ented Gradients (HOG) features combined with a
Random Forest classifier for people detection (Dalal
et al., 2006). This method captures shape and ap-
pearance characteristics of people, leading to accu-
rate detection. However, the HOG-based approach
may struggle with complex occlusion patterns and
require careful parameter tuning for optimal perfor-
mance. Additionally, using HOG for real-time de-
tection is not appropriate as it may lack of the nec-
essary performance despite some efforts for reducing
features calculation time (Pedersoli et al., 2008).
Other solutions are available such as the “Segment
From Point Cloud Perception Toward People Detection
521
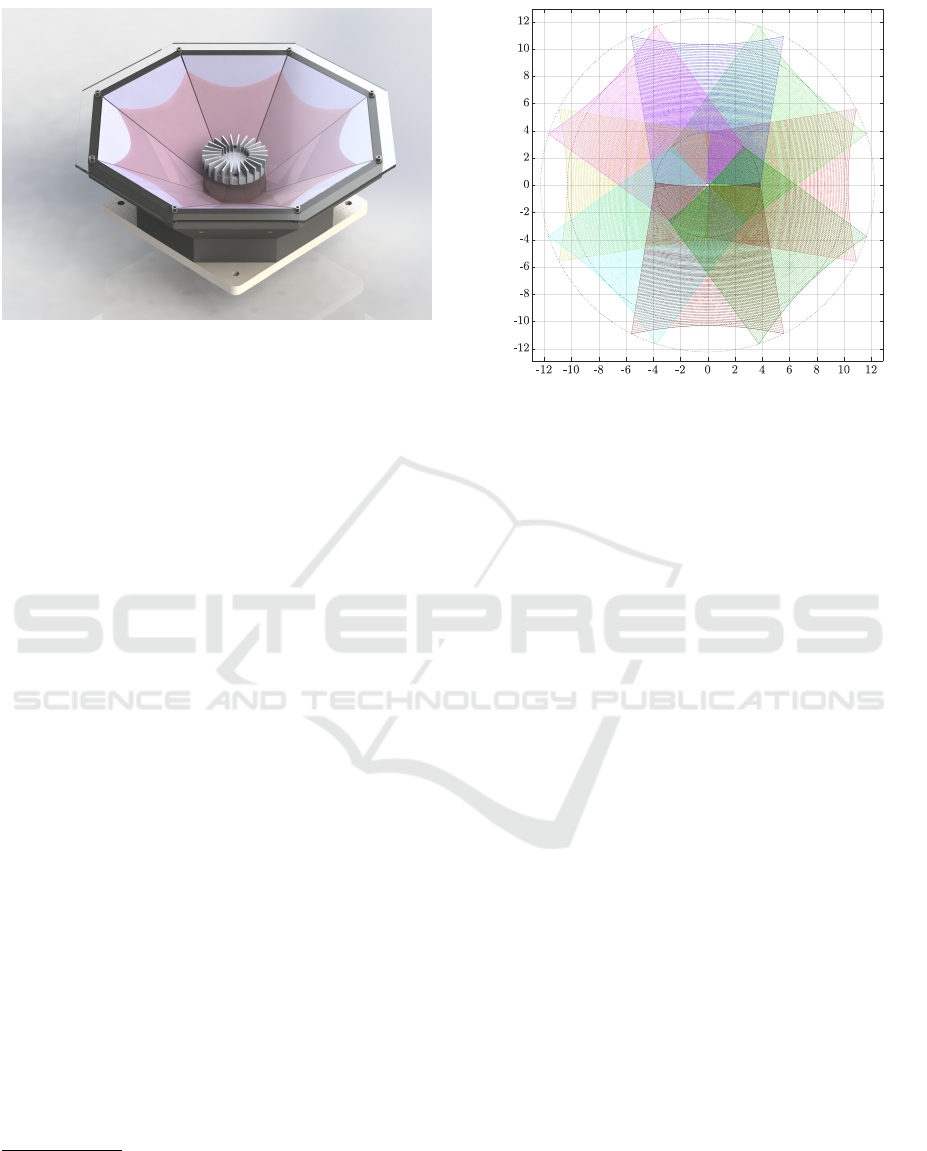
Figure 1: LiDAR used to capture the dataset input
data (Aalerud et al., 2020).
Anything” project by Meta
1
, which focuses on image
segmentation.
The work presented in this paper utilizes a newly
developed LiDAR to accurately locate people using a
Random Forest classifier, outperforming state of the
art solutions reducing installation and data process-
ing costs, with a potential application in diverse fields
such as industrial environments, autonomous driving,
human-robot interaction, safety and security, surveil-
lance, etc.
3 PROPOSED APPROACH
This section provides an overview of the dataset used
in the present study, including details on its collection
process and characteristics. Then, the methodology
used for people detection is explained, outlining the
steps involved in recognising people entities within
the dataset.
3.1 Sensor Description
The dataset is reliant on a LiDAR system that has its
origins in the research described in (Aalerud et al.,
2020). This LiDAR system prototype, as shown in
Figure 1, stands out due to its innovative design, fea-
turing eight individual mirror segments inclined at an
angle of 34
◦
. More specifically, the LiDAR model
used in this system is the OS1-128, produced by
Ouster
2
. The OS1-128 boasts an impressive array of
128 laser emitters evenly distributed over a scanning
1
Segment Anything link available at https://segment-
anything.com/, consulted on October 2023
2
Additional details can be found at https://ouster.com/
blog/introducing-the-os-1-128-lidar-sensor/, accessed in
October 2023
Figure 2: Illustration LiDAR’s coverage in meter from a
distance of 10 meter.
span of 45
◦
. Each of these laser emitters can generate
a remarkable 4096 individual data points in a single
frame.
For the dataset generation process, a configuration
was chosen that employs 2048 data points per frame
and operates at a consistent frame rate of 10 frames
per second (10 fps). This configuration was selected
to facilitate the capture of detailed and dynamic envi-
ronmental data, making it well-suited for various ap-
plications where precision and real-time sensing are
critical.
A visual representation of the LiDAR system’s ca-
pabilities can be seen in Figure 2 from a 10-meter dis-
tance. This Figure provides an informative illustra-
tion of the system’s field of view (FOV), demonstrat-
ing its ability to detect objects and surfaces within a
meter range when situated 10 meters away from the
subject. Additionally, this FOV visualization high-
lights the LiDAR system’s capacity to capture densely
packed spatial data for a specific area of interest.
3.2 Dataset
The dataset was collected in a crowded environment
(conference), where several humans were walking,
sitting, and standing with tables around, stairs, walls,
etc. An example of the collected point cloud is illus-
trated in Figure 3. The LiDAR provides relative posi-
tional information, represented by the coordinates (x,
y, and z). In our case of study, the LiDAR is fixed
in a specific height in order to collect the positional
information.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
522

Figure 3: Visualisation of the obtained point cloud using the
developed LiDAR.
3.3 Developed Architecture
Figure 4 represents the developed architecture in or-
der to detect people from the perceived point cloud.
First, raw data are collected from the LiDAR. Second,
information related to the ground is removed. In the
context of ground removal in point cloud data, a re-
gion growing algorithm can be applied to identify and
separate the ground points from other objects. The al-
gorithm typically starts with a seed point known to
be on the ground surface. These points are more or
less known due to the knowledge of the approximate
sensor position. It then examines the neighboring
points and checks if they satisfy certain criteria, such
as having similar elevation values within a predefined
threshold. If a neighboring point meets the criteria, it
is added to the region. This process continues in an
iterative way until no more points can be added to the
region. By utilizing a region growing algorithm, the
ground points are segmented and then removed for
the case of study. Third, the main dataset is used to
train our Random Forest Classifier. The generalized
developed algorithm is shown in Algorithm 1.
Random Forest Classifier. The Random Forest
classifier is an ensemble learning algorithm that com-
bines the outputs of multiple decision tree classifiers
to perform classification tasks (Belgiu and Dr
˘
agut¸,
2016). It creates an ensemble, or a collection, of de-
cision trees where each tree is trained independently
on a randomly sampled subset of the training data.
During the training process, each decision tree in the
ensemble learns to classify the data based on different
features and thresholds.
Data: Collected Database
Result: People detection in the Point Cloud
Generation of training (TrDB) and testing
database (TsDB);
while Point Cloud Perception ∈ TrDB do
Read current perception;
Ground removal;
Features extraction;
Training using Random Forest Classifier;
end
while Point Cloud Perception ∈ TsDB do
Read current perception;
Ground removal;
Features extraction;
if Features corresponds to people then
people detection;
end
end
Algorithm 1: The developed algorithm to detect people.
When making predictions using the Random For-
est classifier, each decision tree in the ensemble in-
dependently assigns a class label to the input data.
The final prediction is determined by combining the
predictions of all the decision trees, typically through
majority voting. The class label that receives the ma-
jority of votes from the decision trees is selected as
the final predicted class label.
Training and Testing. For training, the labeled
dataset is used to train the Random Forest classifier,
enabling it to learn the distinguishing features of peo-
ple entities. The classifier leverages the collective
knowledge of the decision trees to make accurate pre-
dictions. During the testing phase, the trained Ran-
dom Forest classifier is deployed on new, unseen point
cloud data to detect the presence of people. The clas-
sifier assigns class labels to the input data based on the
majority votes from the decision trees in the ensem-
ble. This majority voting mechanism ensures robust
and reliable people detection results.
By training and testing the Random Forest clas-
sifier on the labeled dataset, the proposed approach
achieves fast people detection in point cloud data. Ad-
ditionally, we removed the ground before training our
data which contributes to accurate and reliable detec-
tion of people in real-world scenarios.
4 EXPERIMENTAL RESULTS
To evaluate the performance of the proposed ap-
proach, a series of experiments were conducted on
From Point Cloud Perception Toward People Detection
523

Raw data from LiDAR
Testing for human
detection
Training RFC for
human detection
Main labeled dataset
Ground Removal
Figure 4: Illustration of the developed methods for human detection.
the dataset comprising various real-world scenarios.
The dataset consisted of point cloud data captured
from a conference. We divided our dataset into two:
Dataset1 and Dataset2. Each of them contains 19 hu-
mans each, which are walking, standing, and sitting.
Figure 5: Illustration of a human detection example. Blue
color represents the perceived point cloud from the LiDAR
while red color represents the detected humans in the scene
using the Random Forest classifier.
It is worth mentioning that all experiments pre-
sented herein have been performed using a MacBook
Pro with Apple M1 Pro processor and 16GB RAM,
and no GPU, cluster, or advanced equipment has been
used, proving that the proposed solution can be easily
replicated and effectively implemented in real-world
scenarios.
In the conducted experiments, Dataset1 and
Dataset2, were utilized. These datasets include peo-
ple activity and behavior during conference sessions
and were collected using the LiDAR that was record-
ing from an elevation of 10 meters.
Dataset1, despite being smaller, still encompasses
a diverse range of people poses and activities ob-
served during the recorded scene. It serves as a
representative sample to evaluate the proposed ap-
Table 1: Example of annotated data.
" psr " : {
" p o s itio n " : {
" x ": 1 . 8 860 3 4 1036 1 4 074 4 ,
" y ": 2 . 0 482 0 5 2752 1 9 747 3 ,
" z ": - 1 . 914 0 9 1 776 4 0 416 9 6
} ,
" scale " : {
" x ": 0 . 4 826 4 1 3579 9 7 475 6 ,
" y ": 0 . 8 237 3 5 1830 1 4 531 1 ,
" z ": 1 . 80 1 308 2 47 0 3 36 1 8
} ,
" r o t atio n " : {
" x ": 0 . 0 13 9 4 2 77 9 1 0 76 5 5 656 ,
" y ": -0 . 0 0 76293 5 6 6 41117 0 5 4 ,
" z ": 1 . 11 9 411 5 76 2 1 45 9 7
}
proach and assess its performance on a relatively lim-
ited dataset from a conference. The smaller size of
Dataset1 allows for a focused analysis of the approach
effectiveness in detecting people with different con-
figurations within the conference environment.
On the other hand, Dataset2 is a larger and more
comprehensive dataset, capturing a broader range of
people behaviors. With its increased size and va-
riety of instances, Dataset2 provides a more exten-
sive and robust evaluation of the proposed approach.
The larger amount of data in Dataset2 enables a more
comprehensive assessment of the approach’s perfor-
mance across various scenarios and configurations en-
countered during the conference.
By using both Dataset1 and Dataset2, the experi-
ments provide insights into the scalability of the pro-
posed approach. The evaluation results obtained from
these datasets contribute on understanding the ap-
proach’s performance in both limited and extensive
data settings derived from conference environments.
Each dataset is divided into a learning (80%) and a
testing dataset (20%). We annotated each person with
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
524

Table 2: Illustration of the obtained results for human detection using RFC (Random Forest Classifier) and MLP (Multi-Layer
Perceptron).
Method Dataset Precision Computation time (s) Learning time (s)
RFC Data1 0.95 0.013 0.08
MLP Data1 0.95 0.013 0.079
RFC Data2 0.95 0.014 0.069
MLP Data2 0.74 0.016 0.079
three types of information: positional information rel-
ative to the liDAR (x, y and z), scale (x, y and z), and
rotation (x, y and z) parameters, thus providing more
information to feature selection and learning. An ex-
ample of an annotated data is represented in Table 1.
The availability of annotated data serves as a solid
foundation for learning and evaluating the imple-
mented approach. The evaluation of the proposed ap-
proach encompasses a comprehensive analysis based
on multiple evaluation metrics, including Precision,
Recall, F1-score, Support, Computation time, and
Learning time.
This comprehensive assessment provides a thor-
ough understanding of the approach’s performance
across various dimensions, ensuring a robust evalu-
ation of its effectiveness.
Precision measures the accuracy of the positive
predictions for a given class. It is calculated as the
ratio of true positives to the sum of true positives and
false positives. A higher precision indicates fewer
false positives. Computation time represents the time
that is spent in order to detect a human from a point
cloud perception. Learning time refers to the duration
taken by the method to acquire knowledge from the
provided training data.
Table 2 shows the obtained results using Random
Forest classifier (RCF) and Multi-Layer Perceptron
(MLP) (Goodfellow et al., 2016). From Dataset1, we
can see that both approaches are similar in all the cri-
teria. Even from the computational and learning time
both approaches are similar.
However, for Dataset2, Random Forest classi-
fier gives a better result in term computational time
(13.5% faster). Additionally, the learning time of
RFC is faster (12,7%) than MLP.
This result confirms that, using our LiDAR which
perceives 10fps, the proposed approach can be con-
sidered as a real-time solution. Due to its fast learn-
ing, we can also think of embedding our approach as
continuous learning technique if new objects need to
be detected. Therefore, RCF can be extended to hu-
man tracking.
5 CONCLUSIONS
This paper presented an approach for fast people de-
tection in point cloud perception using a Random For-
est classifier. The main challenge addressed is related
to the fast detection of people using real collected
data.
The utilization of a multi-point LiDAR system
contributed to enhanced data quality and resolution,
enabling robust and fast people detection. The exper-
imental results demonstrated the effectiveness of the
approach in diverse environments, showcasing its po-
tential for practical applications in various domains.
This paper contributes to the advancement of a
precise and fast people detection in point cloud per-
ception by providing a reliable and efficient solu-
tion with a new developed LiDAR. The approach was
compared to Multi-Layer Perceptron (MLP). For a
bigger dataset scenario, the proposed approach has
obtained better results.
The scalability and versatility of the Random For-
est classifier make it an appealing choice for extend-
ing the approach to other object recognition tasks in
point cloud analysis. The proposed approach has
the potential to significantly impact the fields of au-
tonomous driving, surveillance, human-robot interac-
tion, industrial environments, safety and security, etc.,
enabling safer and more efficient interactions between
humans and intelligent systems, with a high market
potential.
Overall, the proposed approach opens new av-
enues for advancing in real-time human tracking in
point cloud perception, contributing to the broader
goal of improving situational awareness and enabling
intelligent systems to effectively perceive and interact
with their dynamic environments.
Future work includes larger scale testing and fur-
ther validation activities in different environments
(e.g. industrial areas, roads, etc.), as well as the com-
parison with other existing approaches for real-time
people detection.
From Point Cloud Perception Toward People Detection
525

ACKNOWLEDGEMENTS
This work is co-funded by the Research Council of
Norway under the project entitled “Next Generation
3D Machine Vision with Embedded Visual Comput-
ing” with grant number 325748.
REFERENCES
Aalerud, A., Dybedal, J., and Subedi, D. (2020). Reshaping
field of view and resolution with segmented reflectors:
Bridging the gap between rotating and solid-state li-
dars. Sensors, 20(12).
Belgiu, M. and Dr
˘
agut¸, L. (2016). Random forest in remote
sensing: A review of applications and future direc-
tions. ISPRS journal of photogrammetry and remote
sensing, 114:24–31.
Cao, C., Preda, M., and Zaharia, T. (2019). 3d point cloud
compression: A survey. In The 24th International
Conference on 3D Web Technology, pages 1–9.
Cutler, D. R., Edwards Jr., T. C., Beard, K. H., Cutler, A.,
Hess, K. T., Gibson, J., and Lawler, J. J. (2007). Ran-
dom forests for classification in ecology. Ecology,
88(11):2783–2792.
Dai, D., Chen, Z., Bao, P., and Wang, J. (2021). A review of
3d object detection for autonomous driving of electric
vehicles. World Electric Vehicle Journal, 12(3).
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appear-
ance. volume 3952, pages 428–441.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
learning. Nature, 521(7553):436–444.
Huang, X., Mei, G., Zhang, J., and Abbas, R. (2021).
A comprehensive survey on point cloud registration.
arXiv preprint arXiv:2103.02690.
Javaheri, A., Brites, C., Pereira, F., and Ascenso, J. (2017).
Subjective and objective quality evaluation of 3d point
cloud denoising algorithms. In 2017 IEEE Interna-
tional Conference on Multimedia & Expo Workshops
(ICMEW), pages 1–6. IEEE.
Li, Y., Bu, R., Sun, M., Wu, W., Di, X., and Chen, B.
(2018a). Pointcnn: Convolution on x-transformed
points. In Bengio, S., Wallach, H., Larochelle, H.,
Grauman, K., Cesa-Bianchi, N., and Garnett, R., edi-
tors, Advances in Neural Information Processing Sys-
tems, volume 31. Curran Associates, Inc.
Li, Y., Bu, R., Sun, M., Wu, W., Di, X., and Chen, B.
(2018b). Pointcnn: Convolution on x-transformed
points. Advances in neural information processing
systems, 31.
Lin, C.-H., Kong, C., and Lucey, S. (2018). Learning ef-
ficient point cloud generation for dense 3d object re-
construction. In proceedings of the AAAI Conference
on Artificial Intelligence, volume 32.
Pedersoli, M., Gonzalez, J., Chakraborty, B., and Vil-
lanueva, J. J. (2008). Enhancing real-time human
detection based on histograms of oriented gradients.
In Computer Recognition Systems 2, pages 739–746.
Springer.
Qi, C. R., Liu, W., Wu, C., Su, H., and Guibas, L. J. (2017a).
Frustum pointnets for 3d object detection from RGB-
D data. CoRR, abs/1711.08488.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017b). Point-
net: Deep learning on point sets for 3d classification
and segmentation.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017c). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 652–660.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017d). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. In Guyon, I., Luxburg, U. V., Ben-
gio, S., Wallach, H., Fergus, R., Vishwanathan, S., and
Garnett, R., editors, Advances in Neural Information
Processing Systems, volume 30. Curran Associates,
Inc.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017e). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. Advances in neural information pro-
cessing systems, 30.
Shi, S., Wang, X., and Li, H. (2019). Pointrcnn: 3d object
proposal generation and detection from point cloud.
In IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2019, Long Beach, CA, USA, June
16-20, 2019, pages 770–779. Computer Vision Foun-
dation / IEEE.
Simon, M., Milz, S., Amende, K., and Gross, H. (2018).
Complex-yolo: Real-time 3d object detection on point
clouds. CoRR, abs/1803.06199.
Uy, M. A., Pham, Q.-H., Hua, B.-S., Nguyen, T., and
Yeung, S.-K. (2019). Revisiting point cloud clas-
sification: A new benchmark dataset and classifica-
tion model on real-world data. In Proceedings of the
IEEE/CVF international conference on computer vi-
sion, pages 1588–1597.
Yang, G., Huang, X., Hao, Z., Liu, M.-Y., Belongie, S., and
Hariharan, B. (2019a). Pointflow: 3d point cloud gen-
eration with continuous normalizing flows. In Pro-
ceedings of the IEEE/CVF international conference
on computer vision, pages 4541–4550.
Yang, Z., Sun, Y., Liu, S., Shen, X., and Jia, J. (2019b).
STD: sparse-to-dense 3d object detector for point
cloud. CoRR, abs/1907.10471.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
526
