
Improving Reward Estimation in Goal-Conditioned Imitation Learning
with Counterfactual Data and Structural Causal Models
Mohamed Khalil Jabri
1,2,3,4
, Panagiotis Papadakis
1,4
, Ehsan Abbasnejad
2,3,4
, Gilles Coppin
1,4
and Javen Shi
2,3,4
1
IMT Atlantique, Lab-STICC, UMR CNRS 6285, F-29238 Brest, France
2
The University of Adelaide, Adelaide, Australia
3
Australian Institute for Machine Learning, Adelaide, Australia
4
IRL CROSSING, CNRS, Adelaide, Australia
Keywords:
Imitation Learning, Causality, Structural Causal Models (SCMs), Counterfactual Reasoning.
Abstract:
Imitation learning has emerged as a pragmatic alternative to reinforcement learning for teaching agents to
execute specific tasks, mitigating the complexity associated with reward engineering. However, the deploy-
ment of imitation learning in real-world scenarios is hampered by numerous challenges. Often, the scarcity
and expense of demonstration data hinder the effectiveness of imitation learning algorithms. In this paper, we
present a novel approach to enhance the sample efficiency of goal-conditioned imitation learning. Leveraging
the principles of causality, we harness structural causal models as a formalism to generate counterfactual data.
These counterfactual instances are used as additional training data, effectively improving the learning process.
By incorporating causal insights, our method demonstrates its ability to improve imitation learning efficiency
by capitalizing on generated counterfactual data. Through experiments on simulated robotic manipulation
tasks, such as pushing, moving, and sliding objects, we showcase how our approach allows for the learning of
better reward functions resulting in improved performance with a limited number of demonstrations, paving
the way for a more practical and effective implementation of imitation learning in real-world scenarios.
1 INTRODUCTION
The pursuit of training autonomous agents to per-
form tasks efficiently and effectively remains a fun-
damental challenge. While reinforcement learning
has made significant strides (Sutton and Barto, 2018),
it is often plagued by the reliance on reward engi-
neering, making it impractical for real-world applica-
tions. One promising alternative is imitation learning,
a paradigm that offers notable advantages over rein-
forcement learning, as it alleviates the arduous task of
reward engineering and improves data efficiency by
reducing the need for extensive trial and error.
Despite its promise, however, imitation learning is
not without limitations. Acquiring expert demonstra-
tions can be a prohibitively expensive and resource-
intensive process, cumbersome or even unfeasible. In
turn, the reliance on a limited number of demonstra-
tions often leads to suboptimal performance or results
in catastrophic failures when the training data is not
sufficiently representative of the task’s complexity.
In recent years, there has been a growing recog-
nition of the role of causality in improving learning-
based approaches (Sch
¨
olkopf, 2019) (Kaddour et al.,
2022). Causality, the study of cause-and-effect rela-
tionships, has emerged as a powerful tool for gaining
a deeper understanding of how agents interact with
their environments. It provides a framework for rea-
soning about the consequences of different actions
and interventions, which offers the potential to en-
hance the robustness and efficiency of learning.
This work presents a novel causal approach to im-
prove the learning of policies from limited demonstra-
tions in goal-conditioned settings, leveraging causal-
ity by learning Structural Causal Models (SCMs) that
represent the expert’s behavior within its environ-
ment. We harness the learned SCM to generate coun-
terfactual data that simulate what would have hap-
pened had the expert pursued different goals. The
counterfactual data serves as supplementary training
data for goal-conditioned imitation learning, allowing
agents to learn more effectively with less data.
The key contributions of this work include 1) for-
mulating a methodology to learn the SCM of high-
level expert-environment interactions (section 3.2.1),
2) using SCM to generate counterfactual data that
Jabri, M., Papadakis, P., Abbasnejad, E., Coppin, G. and Shi, J.
Improving Reward Estimation in Goal-Conditioned Imitation Learning with Counterfactual Data and Structural Causal Models.
DOI: 10.5220/0012268200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 2, pages 329-337
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
329

correspond to alternative goals and actions (section
3.2.2), and 3) demonstrating how the counterfactual
data could serve as additional training data to improve
learning (section 4.2). We evaluate our method in a
series of simulated robotic manipulation tasks con-
sisting of pushing, moving and sliding objects with
a 7-DoF robotic arm. Experiments demonstrate that
our method is able to improve goal-conditioned, gen-
erative adversarial imitation learning, especially when
few demonstrations are available. The obtained re-
sults shed light on the potential of causality to ad-
dress fundamental challenges in imitation learning
and to advance the capabilities of autonomous agents
in learning complex tasks.
2 BACKGROUND
2.1 Imitation Learning
Imitation learning enables agents to acquire skills by
imitating expert behavior rather than relying on trial
and error. Several key approaches have emerged in
imitation learning. Behavior cloning involves learn-
ing a policy that mimics the actions of an expert
based on observed state-action pairs (Bain and Sam-
mut, 1999). Inverse reinforcement learning (Russell,
1998) (Mnih et al., 2013) (Silver et al., 2016) aims to
recover the underlying reward function from expert
demonstrations, allowing agents to generalize beyond
specific trajectories. Generative Adversarial Imitation
Learning (GAIL) (Ho and Ermon, 2016) bypasses this
intermediate step and directly learns the policy from
demonstrations by formulating imitation learning as
a two-player minimax game between a discriminator
D and the policy π. The discriminator aims to distin-
guish between expert trajectories and agent-generated
trajectories, while the policy generator seeks to pro-
duce trajectories that are indistinguishable from ex-
pert data.
Goal-Conditioned Imitation Learning. In goal-
conditioned imitation learning (Liu et al., 2022), each
task or trajectory is uniquely characterized by a dis-
tinct goal state. Thus, the policy is conditioned
on both the observed states and designated goals,
namely, as π : S × G → A.
One common challenge in goal-conditioned set-
tings is sparse rewards (Hare, 2019), typically taking
on a binary form that denotes goal attainment. This
poses a substantial challenge for traditional reinforce-
ment learning (RL) methods due to the absence of in-
formative reward signals in unsuccessful trajectories.
Hindsight Experience Replay (HER) (Andrychowicz
et al., 2017) offers a remedy to this problem by intro-
ducing a relabeling trick that reinterprets unsuccessful
trajectories as valuable learning experience. By treat-
ing these trajectories as successful ones with different
goal states, i.e. states that were actually achieved, the
policy is able to learn from its failures which drasti-
cally improves sample efficiency in RL.
GoalGAIL (Ding et al., 2019) combines GAIL
with HER relabeling strategy, which yields notable
improvements in learning efficiency and makes it a
compelling approach for goal-conditioned imitation
learning. Our proposed approach extends GoalGAIL
by leveraging counterfactual data to improve reward
learning efficiency.
2.2 Structural Causal Models (SCMs)
Structural Causal Models (SCMs) (Pearl et al., 2000)
offer a formal framework for modeling causal re-
lationships in a system. At the core of SCMs lie
two fundamental types of variables: endogenous
and exogenous. Exogenous variables represent un-
controllable external factors and serve as indepen-
dent sources of variation. Endogenous variables, on
the other hand, represent outcomes influenced by
other variables within the model through structural
equations, capturing the system’s internal dynamics.
These equations usually take the following form:
X
i
= f
i
(Parents(X
i
),U
i
) (1)
where X
i
and U
i
denote endogenous and exogenous
variables respectively, f
i
is a deterministic function
specifying the causal dependencies between the vari-
ables, and Parents(X) denotes the variables that have
a direct causal effect on X. An SCM is typically as-
sociated with a Directed Acyclic Graph (DAG) as a
graphical representation of the causal system, where
the nodes correspond to variables, and the directed
edges indicate causal dependencies.
2.3 Counterfactual Reasoning with
SCMs
Structural Causal Models (SCMs) offer a formal
framework for conducting counterfactual reasoning
(Pearl, 2013). The process of counterfactual reason-
ing with SCMs involves three essential steps.
• Abduction: This step consists in recovering the
values of exogenous variables within the SCM
based on the observed evidence.
• Intervention: Once exogenous variables are in-
ferred, we modify the SCM by intervening on one
or more variables of interest. This represents a
LICARSA 2023 - Special Session on Learning in Control and Robotic Systems Applications
330

hypothetical change to the system, allowing to ex-
plore ”what if” scenarios.
• Prediction: We can predict the counterfactual
outcome of interest using the updated structural
equations within the modified SCM.
3 CAUSAL MECHANISM AND
COUNTERFACTUAL
REASONING
3.1 Problem Formulation
In this work, we consider a goal-conditioned
Markov Decision Process (MDP) defined by a tuple
(S, G, A, P, R, γ), where S denotes the state space, A
the action space, G ⊂ S the goal space, P(s
t+1
|s
t
, a
t
)
the transition dynamics, R(s
t
, a
t
, g
t
) the true reward
function indicating whether the goal was achieved and
0 < γ < 1 the discount factor.
Given a set of N expert trajectories D
E
=
{(s
i
t
, a
i
t
, g
i
), 0 ⩽ t ⩽ T }
1⩽i⩽N
, our goal is to learn a
policy π that matches the distribution of the trajecto-
ries in the demonstrations by optimizing the following
objective:
min
D
max
π
E
π
[logD(s, g, a)] + E
π
E
[log(1 − D(s, g, a))]
(2)
where π
E
denotes the expert policy and D a discrimi-
nator that outputs a score for each tuple (s, g, a).
In goal-conditioned settings, the policy is typi-
cally conditioned on the current state and the goal. In
this work, we make the choice of introducing a latent
variable denoted m
t
, which we refer to as the moti-
vator. m
t
is causally affected by both s
t
and g and
represents the intermediate relative goal at state s
t
in
relation to achieving the absolute goal g.
From a causal perspective, the concept of interme-
diate relative goal is more informative to the agent.
The policy is therefore conditioned on m
t
instead of
(s
t
, g
t
). One could argue that m would naturally corre-
spond to the intermediate features learned by a neural
policy. However, this is not the case in our formu-
lation. To understand this, let us start by depicting
the SCM that we assume and its corresponding causal
graph.
We assume that our SCM satisfies the following
structural equation, as shown in the causal graph in
Figure 1:
m
t
= f
m
(s
t
, g, u
t
) (3)
where u
t
denotes the exogenous variable capturing the
external factors affecting the system as explained in
section 2.2.
For simplicity, we omit time indexes for all vari-
ables in the remainder of this work, which should
not introduce any ambiguity. Our goal is to learn
the causal mechanism governing the generation of
m, which corresponds to the above equation. Subse-
quently, we want to learn a policy conditioned on the
motivator m. Details on how to learn the SCM and
generate counterfactual data are provided in section
3.2 (section 4 describes how we leverage the learned
SCM and the counterfactual data to learn the policy).
We therefore separate the processes of learning the
structural equation of m and the policy π. Learning
the former can be thought of as learning a high-level
causal policy whose role is to generate abstract rel-
ative subgoals. The reason we choose to learn the
causal model for a high-level policy is that it is sim-
pler and easier than learning fine-grained causal rela-
tionships directly linking the state and goal pairs to
actions, given a limited amount of expert data. To
make an analogy, this can be thought of as learning
the overall directions in a robot navigation problem
instead of learning specific fine-grained actions such
as controlling the forces applied by the robot actua-
tors.
This results in two benefits. First, once the SCM is
learned, one can reason counterfactually about what
would have happened had the goal been different.
This allows us to generate high-level counterfactual
policy demonstrations in the form of (s, g, m). By
conditioning the policy on counterfactual motivators,
one can indirectly obtain counterfactual actions un-
der a given policy. Second, by conditioning on m,
we are separating policy training from the process of
identifying relevant causal features. Neural networks
are known for their tendency to learn spurious corre-
lations rather than task-relevant features (Shah et al.,
2020). By learning the causal mechanism of m and
conditioning the policy on it, we are limiting the ex-
posure of the policy to spurious features, as these will
rather be captured by the exogenous variable u.
3.2 SCM Learning and Counterfactuals
Generation
Given the SCM in equation (3), one could reason
counterfactually for what would have been the action
taken by the agent had its motivator been different. At
a given timestep t, given an observed triplet (s, g, a),
we want to predict the counterfactual motivator for an
alternative goal g′ and infer the agent action given that
motivator under the current policy.
Recall the three steps involved in the counterfac-
tual reasoning process (see section 2.3). The first
step consists of recovering the noise variable from
Improving Reward Estimation in Goal-Conditioned Imitation Learning with Counterfactual Data and Structural Causal Models
331
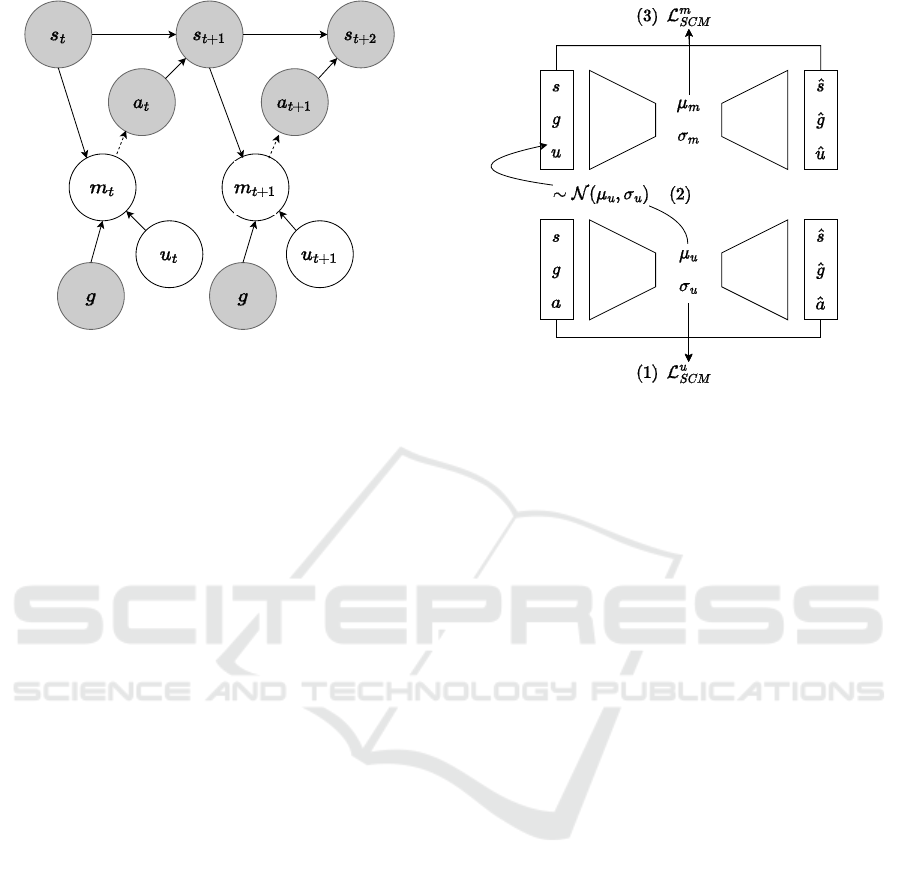
Figure 1: The causal graph describing the expert trajec-
tories’ generation process between t and t + 2. Solid and
dashed lines denote causal and conditional dependence, re-
spectively. Shaded nodes are observed variables.
the observed evidence, which corresponds in our case
to (s,g, a). Thus, we need to learn an inverse map-
ping from these observed variables to the indepen-
dent noise term u which we assume follows a standard
normal distribution. Similarly, to be able to perform
the second and third steps, it is necessary to approx-
imate the structural function f
m
in equation (3). To
capture the causal relationship between the variables,
both functions need to be learned simultaneously so
as to capture the joint distribution p(m,u|s, g, a).
3.2.1 Learning the SCM
We cast the learning of both functions in a dou-
ble Variational Autoencoder (VAE) (Kingma and
Welling, 2013) setting, allowing us to approximate
the two functions concurrently.
The encoders of the VAEs parameterize the
mean and log-variance of two Gaussian distribu-
tions: q
m
(m|s, g, u) = N (µ
m
(s, g, u), σ
2
m
(s, g, u)) and
q
u
(u|s, g, a) = N (µ
u
(s, g, a), σ
2
u
(s, g, a)). The corre-
sponding decoders are defined as d
m
(m) = (ˆs, ˆg, ˆu)
and d
u
(u) = ( ˆs, ˆg, ˆa). Let D
SCM
be a set of trajecto-
ries used to learn the SCM (we discuss in section 4.1
the choice of the training trajectories for the SCM).
To learn the SCM from the observed trajectories in
D
SCM
, we alternate between optimizing the following
two losses:
L
u
SCM
= E
u∼q
u
(u|s,g,a),s,g,a∼D
SCM
||(d
u
(u)−(s, g, a))||
2
+
KL(q
u
(u|s, g, a)∥N (0, 1)) (4)
Figure 2: The three steps of the SCM learning loop: (1)
Update u’s VAE. (2) Sample u batch from the updated dis-
tribution. (3) Update m’s VAE.
L
m
SCM
= E
m∼q
m
(m|s,g,u),u∼q
u
(u|s,g,a),s,g,a∼D
SCM
||(d
m
(m) − (s, g, u))||
2
+
KL(q
m
(m|s, g, u)∥N (0, 1)) (5)
In each iteration, we sample a u batch from the
updated distribution q
u
(s, g, a) to use as input to the
VAE corresponding to m. This is essential to learn
the dependencies between the exogenous variable m
and the motivator m. Figure 2 summarizes the SCM
learning steps.
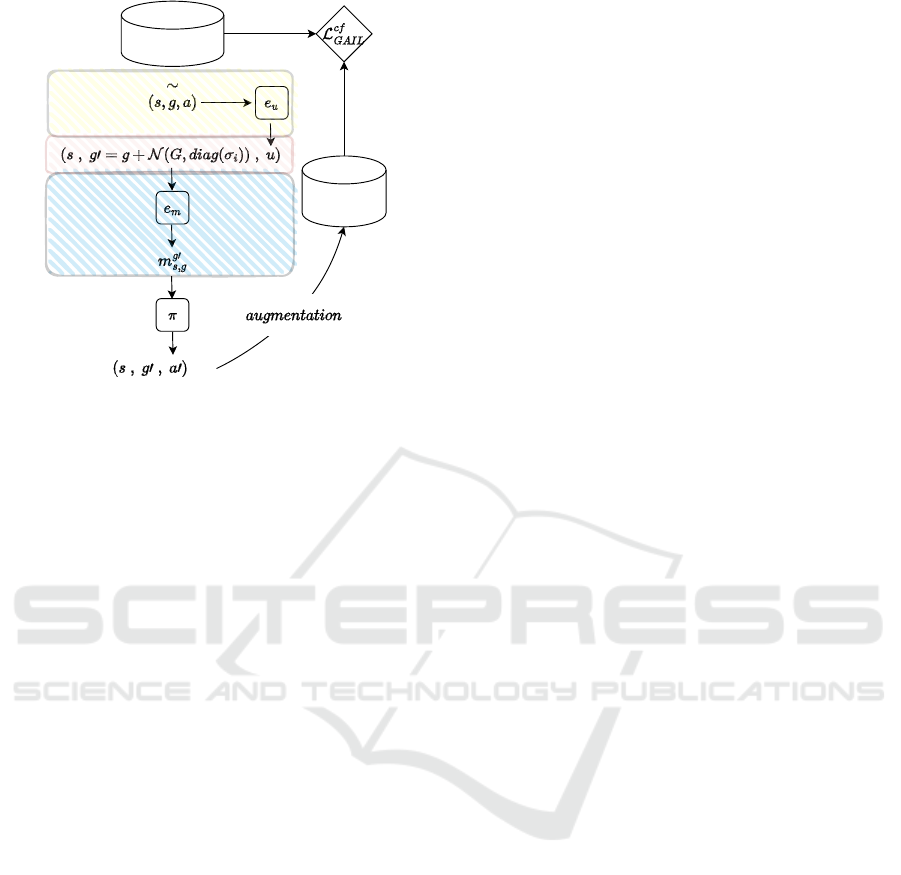
3.2.2 Generating Counterfactual Data
Once we have approximated the SCM, we can gen-
erate counterfactual data points following the steps
in section 2.3. Let e
m
and e
u
denote the func-
tions giving the deterministic VAEs’ outputs, i.e. the
learned distributions’ means: e
m
(s, g, u) = µ
m
(s, g, u)
and e
u
(s, g, a) = µ
u
(s, g, a). For a given triplet (s, g, a),
we denote the corresponding motivator as m
s,g
=
e
m
(s, g, e
u
(s, g, a)). Given an alternative goal g
′
, we
denote the corresponding counterfactual motivator as
m
g
′
s,g
. To predict m
g
′
s,g
, we use e
u
to recover the noise
term from the observed evidence (s, g, a) and we in-
ject it in the structural equation (3) where we also set
the goal to g′. The predicted counterfactual motivator
can then be written as:
m
g
′
s,g
= e
m
(s, g
′
, e
u
(s, g, a)) (6)
Figure 3 summarizes the counterfactual data genera-
tion steps.
LICARSA 2023 - Special Session on Learning in Control and Robotic Systems Applications
332
demonstrations
policy
trajectories
Figure 3: Counterfactual data generation: The yellow, red
and blue boxes denote the abduction, intervention and pre-
diction steps respectively.
4 POLICY LEARNING WITH
CAUSAL REASONING
We base our approach on GoalGAIL. GoalGAIL op-
timizes equation (2) by alternating between two steps:
learning the reward function and optimizing the pol-
icy. In the first step, the discriminator is trained to
minimize the GAIL loss:
L
GAIL
= E
s,g,a∼D
π
[logD(s, g, a)] +
E
s,g,a∼D
E
[log(1 − D(s, g, a))] (7)
where D
π
denotes the trajectories generated by the
current version of the policy, i.e. the on-policy data.
For the second step, the policy is optimized using any
RL algorithm, with respect to the following reward
r = D(s, g, a).
In our approach, we start by pretraining the SCM
from expert demonstrations. Then, as we learn the
policy and the reward, we keep finetuning the learned
SCM. The learned SCM is used at each step to gener-
ate counterfactual data for reward learning. For pol-
icy learning, the only difference is that it is no longer
conditioned on the state-goal pairs but rather on the
causal motivator learned by the SCM. In the follow-
ing, we detail each of these three steps.
4.1 Pretraining and Finetuning the
SCM
At the beginning of the learning process, we want
to capture all the causal information in the available
demonstrations. We fit the two VAEs discussed in
3.2 on the expert demonstrations. In this step, D
SCM
in equations (4) and (5) is set to D
E
. However, the
available demonstrations are usually limited and in-
sufficient to learn complex patterns of the SCM. To
alleviate this problem, at each iteration, we finetune
the VAEs on data from both the expert demonstrations
and the trajectories generated by the current policy.
D
SCM
is then set to D
E
∪D
π
. As we update the policy,
the quality of its trajectories improves, which benefits
the SCM. Policy trajectories prevent the SCM from
overfitting to the limited demonstration data without
decreasing the performance.
4.2 Learning the Reward with
Counterfactual Demonstrations
In GoalGAIL, the discriminator is optimized to learn
to distinguish expert trajectories from those generated
by the policy. While adversarial imitation learning
provides a direct way to learn from demonstrations
and bypass the intermediate step in IRL, they inher-
ently suffer from the instability of the learning pro-
cess as in GANs (Arjovsky and Bottou, 2017). Such
a problem is even more severe in adversarial imitation
learning because 1) expert data is very limited and 2)
the generator, i.e. the policy, is trained by policy gra-
dient (Sutton et al., 1999) and not by simple gradient
descent as in GANs. Adversarial training of GANs
is unstable because it requires a balance between the
discriminator and the policy, which is hard to achieve,
especially at the beginning of the learning. In early it-
erations, the trajectories generated by the policy are
random, which makes them easily distinguishable by
the discriminator. This leads to having a too-powerful
discriminator, making its feedback uninformative for
the policy. Another problem is that of mode collapse.
Mode collapse occurs when the generator, i.e. the pol-
icy, outputs a narrow set of trajectories instead of ex-
ploring the whole policy space. This problem is more
likely to occur when the training data is limited.
We show that counterfactual examples can help
mitigate the problems mentioned above. Since the
SCM learns the expert behavior, it is natural to gener-
ate counterfactuals from expert demonstrations rather
than policy rollouts. An intuitive way to use these
counterfactual examples is to add them as supplemen-
tary demonstrations. However, it is more efficient to
use such counterfactual demonstrations to augment
policy data. In fact, given the low quality of coun-
terfactuals compared to real expert demonstrations,
adding them to the demonstrations may in fact de-
crease the performance. However, these counterfac-
tuals could serve well as policy data.
Improving Reward Estimation in Goal-Conditioned Imitation Learning with Counterfactual Data and Structural Causal Models
333

To understand the intuition behind such a claim,
we should recall that the counterfactual data is more
difficult to classify for the discriminator because it
resembles the expert demonstrations at the motivator
level. This can mitigate the first problem mentioned
above by preventing the discriminator from being too
powerful in classifying trajectories. This is in line
with work in supervised learning showing that learn-
ing from difficult examples is more efficient (Robin-
son et al., 2021). Furthermore, by adding counterfac-
tuals, the policy data becomes more diverse, which
helps prevent mode collapse. It is also worth not-
ing that as the policy improves, the quality of coun-
terfactuals improves, and classifying them becomes
even more difficult. The discriminator output then be-
comes more and more informative for the policy. We
show in the experiments that this allows learning bet-
ter reward functions.
The modified GAIL loss then becomes:
L
c f
GAIL
= E
s,g,a∼D
π
∪D
cf
π
logD(s, g, a)+
E
s,g,a∼D
expert
log(1 − D(s, a, g)) (8)
where D
cf
π
denotes the counterfactual policy data.
This corresponds to D
π
with every data point rela-
beled counterfactually as explained in 3.2 using alter-
native goals sampled by adding Gaussian noise with
variance σ
2
to the original ones: D
cf
π
= {(s, g′, a′ =
π(s, m
g′
s,g
), g′ ∼ N (g, diag(σ)), (s, g) ∼ D
π
}
4.3 Learning the Policy
The policy is optimized using an RL algorithm with
respect to the reward output by the discriminator. To
benefit from HER, we use an off-policy algorithm,
namely DDPG (Lillicrap et al., 2015), as in the origi-
nal GoalGAIL work. In our setting, the policy input is
no longer the state and goal pairs, but rather the mo-
tivator m inferred from (s, g, u). When learning the
SCM, u is sampled from the distribution output by
the u’s VAE encoder for a given (s, g, a) triple. How-
ever, when learning the policy or interacting with the
environment, we only have access to (s, g). We over-
come this problem by using the average mean output
by u’s VAE encoder across all the trajectories gener-
ated by both the policy and the expert. We denote this
inference noise term as µ
∗
u
. The predicted actions then
become a = π(e
m
(s, g, µ
∗
u
)). Consequently, DDPG’s
Q-function becomes:
L
Q
= E
(s,g,a,s
′
)∼R
[(Q(s, g, a)−
(D(s, g, a) + γQ(s
′
, π(s
′
, g, π(s
′
, g, µ
∗
u
))))
2
] (9)
where s
′
denotes the next state reached after taking
action a in state s and R denotes the policy replay
buffer containing all the trajectories generated by the
policy since the beginning of the learning. Similarly,
DDPG’s policy objective becomes:
J
π
= E
s∼π
[Q(s, π(s, g, µ
∗
m
))] (10)
Algorithm 1 summarizes the entire approach.
Input: Random π, Demonstrations set D
E
,
Empty buffers R , D
SCM
and D
π
// SCM pretraining
D
SCM
← D
E
for k=1 to n do
Update SCM using eq. (4) and (5)
end
// Policy Learning Loop
for k=1 to m do
// Interaction with the
Environment
D
π
← {(s, g, a) ∼ π}
R ← R ∪ D
π
// SCM Finetuning
D
SCM
← D
E
∪ D
π
Update SCM using eq. (4) and (5)
// Counterfactuals Generation
D
cf
π
← {(s, g′, a′ = π(s, m
g′
s,g
), g′ ∼
N (g, diag(σ)), (s, g) ∼ D
π
}
// Reward Update
Minimize L
c f
GAIL
in eq. (8)
// Policy Update
Update Q-function using eq. (9)
Update π using eq. (10)
end
Algorithm 1: Overview of the proposed approach.
5 EXPERIMENTAL RESULTS
We conduct experiments in a simulated environment
featuring a 7-DoF Fetch Mobile Manipulator arm
with a two-fingered parallel gripper (Plappert et al.,
2018). We tackle three diverse manipulation tasks.
1) Push: The agent’s mission is to move a box by
pushing it along a table, guiding it to reach a prede-
termined goal position. 2) Pick and Place: The agent
has to grasp a box from a table using its gripper and
then move it to a designated goal position. 3) Push:
The agent’s task is to hit a puck resting on a table in
such a way that it slides and comes to a halt at the
specific goal position.
Our experiments aim to address three key ques-
tions. 1) Does our method improve the agent’s per-
formance compared to the baseline (GoalGAIL)? 2)
What impact does the incorporation of counterfactual
data have on the learned reward function? 3) Can
LICARSA 2023 - Special Session on Learning in Control and Robotic Systems Applications
334

our method perform efficiently with fewer demonstra-
tions?
5.1 Sample Efficiency
To assess the effectiveness of our approach, we
present in Figure 4 the learning curves for each of the
three tasks with 10 expert demonstrations. The curves
illustrate the success rate achieved by both GoalGAIL
and our method over the course of the training. The
success rate is computed over 10 test episodes, and the
curves show the mean and standard deviation of the
results averaged over 5 independent random seeds.
The obtained learning curves show that our
method consistently outperforms GoalGAIL in terms
of both final success rate and convergence speed
across all three tasks. This suggests that the perfor-
mance gain can be attributed to our method’s abil-
ity to leverage counterfactual data. To gain deeper
insights into how the counterfactual data affects the
learning process, we examine the difference between
the reward functions learned by our method and the
baseline.
5.2 Learned Rewards with
Counterfactuals
In this section, we focus our analysis on the Pick and
Place task with 10 expert demonstrations. We dissect
the influence of counterfactual data on the learned re-
ward function.
Figure 5 presents the evolving reward distribu-
tions learned by the discriminator in both our method
and the baseline for expert demonstrations and trajec-
tories generated by the policy. The plotted reward
distributions unveil several noteworthy observations.
Firstly, our method exhibits a reward distribution that
is notably flatter and less skewed compared to the
baseline. Furthermore, our approach tends to out-
put rewards that are generally less optimistic over-
all. This is evident when examining the distribu-
tion centroids at convergence for expert demonstra-
tions, where our method’s reward distribution cen-
ters around approximately 0.6 (Figure 5c), in contrast
to the baseline’s which centers around approximately
0.9 (Figure 5a). Similarly, for policy-generated trajec-
tories, our method’s rewards span the whole reward
space (Figure 5d) while the baseline’s rewards are
predominantly concentrated above 0.5 (Figure 5b).
These observations suggest that counterfactual
data acts as a regularizer preventing the overestima-
tion of the reward. Due to the way we generate coun-
terfactual data using the learned SCM, its quality re-
sembles that of the expert demonstrations, preventing
the discriminator from confidently distinguishing be-
tween the two. This in turn curbs the discriminator’s
tendency to assign overly optimistic rewards as we
can observe with the baseline. The resulting reward
distribution makes the discriminator’s feedback more
informative to the policy which explains the improved
performance and expedited convergence observed in
our approach.
We further examine the reward dynamics across
various trajectory types: expert demonstrations, suc-
cessful policy trajectories, and failed policy trajecto-
ries. We randomly select one representative trajectory
from each category and plot the reward predictions
generated by both GoalGAIL and our method at each
timestep along these trajectories. The obtained results
shown in Figure 6 are in line with the earlier observa-
tions regarding the more conservative nature of the
reward in our method compared to the baseline. Ad-
ditionally, our approach maintains a higher degree of
reward consistency throughout the trajectory, in con-
trast to the baseline’s oscillatory reward predictions.
5.3 Low Data Regime
In this section, we conduct experiments to assess the
robustness of our method in the face of a reduced
number of demonstrations. In Figure 7, we present
the success rate achieved at convergence for the Pick
and Place task, averaged across 5 independent runs,
as we vary the number of expert demonstrations given
to the agent. The results show that our method con-
sistently outperforms the baseline. More importantly,
our method exhibits a milder decline in performance
as the number of demonstrations decreases when con-
trasted with the baseline.
6 CONCLUSION
In this paper, we have presented a novel approach to
enhance the efficiency and effectiveness of genera-
tive adversarial imitation learning in goal-conditioned
tasks. Our method leverages the power of Structural
Causal Models to improve the learning process. By
learning the causal mechanism governing a high-level
behavior policy of the demonstrator, we are able to
generate counterfactual data that we use as additional
training data for the reward function. Our experi-
ments show that the incorporation of counterfactual
data mitigates reward overestimation and improves
its informativeness for policy learning. This results
in superior performance and faster convergence com-
pared to the baseline. Moreover, our methods perform
well in scenarios with limited expert demonstrations
Improving Reward Estimation in Goal-Conditioned Imitation Learning with Counterfactual Data and Structural Causal Models
335
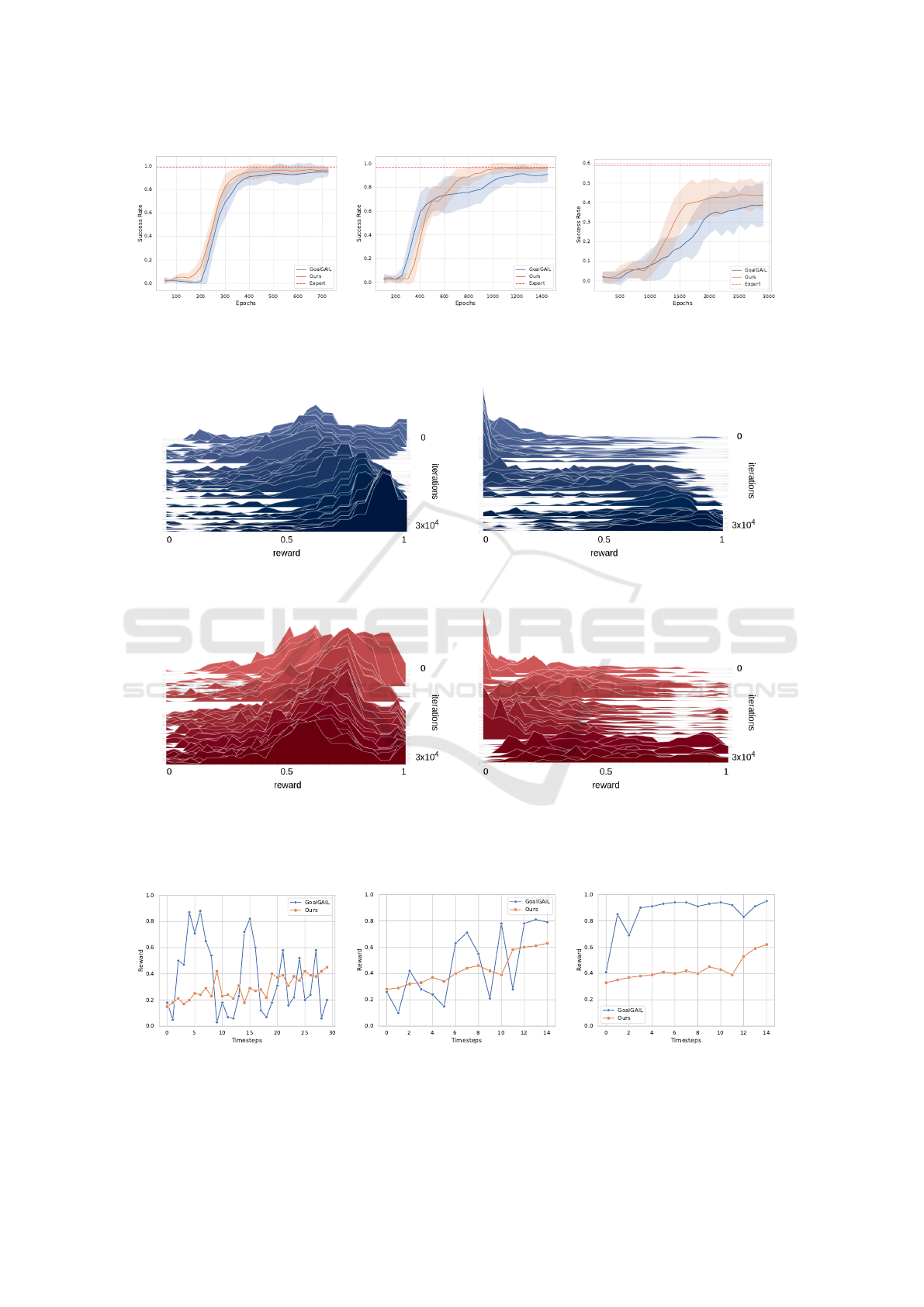
(a) Push. (b) Pick and Place. (c) Slide.
Figure 4: Learning curves of our approach and the baseline for different tasks: Our approach boosts the final performance of
GoalGAIL and accelerates convergence across all three tasks.
(a) GoalGAIL reward distribution
for expert demonstrations.
(b) GoalGAIL reward distribution
for policy trajectories.
(c) Our approach’s reward distribution
for expert demonstrations.
(d) Our approach’s reward distribution
for policy trajectories.
Figure 5: The distribution of the rewards learned by our approach and the baseline: Our method mitigates reward overestima-
tion and demonstrates flatter, less skewed reward distributions for both expert demonstrations and policy trajectories.
(a) Failed trajectory. (b) Successful trajectory. (c) Expert demonstration.
Figure 6: Reward predictions by our approach and the baseline for different types of trajectories: The reward output from our
method exhibits greater consistency throughout trajectory execution.
LICARSA 2023 - Special Session on Learning in Control and Robotic Systems Applications
336
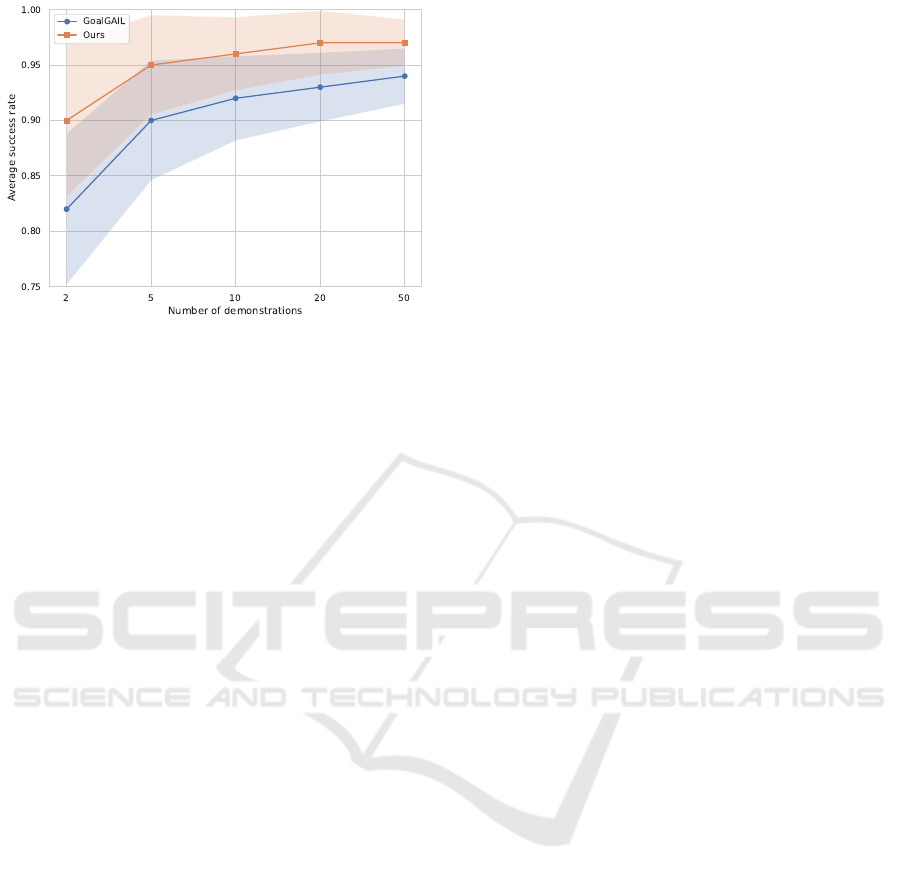
Figure 7: Average success rate for different numbers of
demonstrations: Our method is more resilient to the de-
crease of the number of demonstrations.
and make a step toward achieving more reliable imi-
tation learning using causality.
ACKNOWLEDGEMENTS
This work was funded in part by the region of Brittany
under the ROGAN project. We are grateful for their
support, which made this research possible.
REFERENCES
Andrychowicz, M., Wolski, F., Ray, A., Schneider, J., Fong,
R., Welinder, P., McGrew, B., Tobin, J., Pieter Abbeel,
O., and Zaremba, W. (2017). Hindsight experience re-
play. Advances in neural information processing sys-
tems, 30.
Arjovsky, M. and Bottou, L. (2017). Towards principled
methods for training generative adversarial networks.
arXiv preprint arXiv:1701.04862.
Bain, M. and Sammut, C. (1999). A framework for be-
havioural cloning. In Machine Intelligence 15, Intel-
ligent Agents [St. Catherine’s College, Oxford, July
1995], page 103–129, GBR. Oxford University.
Ding, Y., Florensa, C., Abbeel, P., and Phielipp, M. (2019).
Goal-conditioned imitation learning. Advances in
neural information processing systems, 32.
Hare, J. (2019). Dealing with sparse rewards in reinforce-
ment learning. arXiv preprint arXiv:1910.09281.
Ho, J. and Ermon, S. (2016). Generative adversarial imi-
tation learning. Advances in neural information pro-
cessing systems, 29.
Kaddour, J., Lynch, A., Liu, Q., Kusner, M. J., and Silva, R.
(2022). Causal machine learning: A survey and open
problems. arXiv preprint arXiv:2206.15475.
Kingma, D. P. and Welling, M. (2013). Auto-encoding vari-
ational bayes. arXiv preprint arXiv:1312.6114.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2015). Contin-
uous control with deep reinforcement learning. arXiv
preprint arXiv:1509.02971.
Liu, M., Zhu, M., and Zhang, W. (2022). Goal-
conditioned reinforcement learning: Problems and so-
lutions. arXiv preprint arXiv:2201.08299.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Pearl, J. (2013). Structural counterfactuals: A brief intro-
duction. Cognitive science, 37(6):977–985.
Pearl, J. et al. (2000). Models, reasoning and inference.
Cambridge, UK: CambridgeUniversityPress, 19(2):3.
Plappert, M., Andrychowicz, M., Ray, A., McGrew, B.,
Baker, B., Powell, G., Schneider, J., Tobin, J.,
Chociej, M., Welinder, P., Kumar, V., and Zaremba,
W. (2018). Multi-goal reinforcement learning: Chal-
lenging robotics environments and request for re-
search. CoRR, abs/1802.09464.
Robinson, J. D., Chuang, C.-Y., Sra, S., and Jegelka, S.
(2021). Contrastive learning with hard negative sam-
ples. In International Conference on Learning Repre-
sentations.
Russell, S. (1998). Learning agents for uncertain environ-
ments. In Proceedings of the eleventh annual confer-
ence on Computational learning theory, pages 101–
103.
Sch
¨
olkopf, B. (2019). Causality for machine learning.
CoRR, abs/1911.10500.
Shah, H., Tamuly, K., Raghunathan, A., Jain, P., and Netra-
palli, P. (2020). The pitfalls of simplicity bias in neural
networks. Advances in Neural Information Processing
Systems, 33:9573–9585.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the game of go with deep neural networks
and tree search. nature, 529(7587):484–489.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Sutton, R. S., McAllester, D., Singh, S., and Mansour, Y.
(1999). Policy gradient methods for reinforcement
learning with function approximation. Advances in
neural information processing systems, 12.
Improving Reward Estimation in Goal-Conditioned Imitation Learning with Counterfactual Data and Structural Causal Models
337
