
The Exploration of Small Sample-Oriented Object Detection
Technology in the Field of Electric Power
Yanjun Dong
1
, Shigeng Wang
2
, Xiaoyu Yin
1
, Xi Chen
1
and Jiao Peng
1
1
State Grid Hebei Electric Power Company Co., Ltd Information & Telecommunication Branch, Shijiazhuang, China
2
Beijing University of Posts and Telecommunications, Beijing, China
Keywords: Power Technology, Small Sample, Target Detection.
Abstract: In view of the difficulties, low efficiency and large amount of data in current grid patrol inspection, this
project plans to study a small sample patrol inspection method based on dual-core. Firstly, based on the
object recognition method of FASTERRCNN, a two-person network model of image and query image is
constructed. Then, the improved regional proposal network (RPN) module is used to generate a higher
quality proposal; finally, the regional boundary of the supporting image and the query image is matched to a
new regional boundary. The experiments show that the method can detect the“Bird's nest” and“Insulator” in
the power network with only 10 support maps in the EPD database established by ourselves, its detection
index mAP value can reach 18.92% . Compared with other algorithms, the detection model of small sample
based on binary star network proposed in this project has better performance and greater lightweight
advantage under the condition of small sample, it can provide reference for the research of new power
detection methods.
1
INTRODUCTION
Power Transmission Equipment in outdoor operation,
the long-term operation of the stability of higher
requirements, its outdoor operation will be affected
by many uncertain factors, or even damage it. The
failure of power grid, such as insulator damage,
voltage balance ring damage and fall off, bird
invasion and shock hammer damage, has brought
huge security hidden trouble to power grid operation
and security operation of power grid. With the rapid
development of UAV technology, UAV detection is
gradually replacing manual detection. The
unmanned aerial vehicle (UAV) has the advantages
of convenient carrying, quick response, easy
operation and large amount of image data collection.
With the development of electric power industry to
smart grid, the traditional mathematical model has
been difficult to adapt to the new requirements of
grid operation and maintenance. The introduction of
deep learning technology in power industry can
effectively solve this problem. In-depth learning
extracts Galway's failure features from low-level
data layer by layer, which can effectively
circumvent the artificial features' selective
preference for data information (Shenzhen., 2021).
Aiming at the fault diagnosis of synchronous motor,
a ReLU-DBN oil sample analysis method based on
the volatile gas in transformer oil sample is proposed
in this paper (Wen Haorapido, 2022), and the
method is improved. For transmission line fault,
double Softmax classifier is used in reference (Xu
Weili, 2022), and a method of fault identification
and phase selection for transmission line is proposed
based on CNN, thus the problem of non-independent
classification of internal and external fault
judgement and phase selection is solved.
2
TWINNED NETWORK MODEL
ALGORITHM FLOW
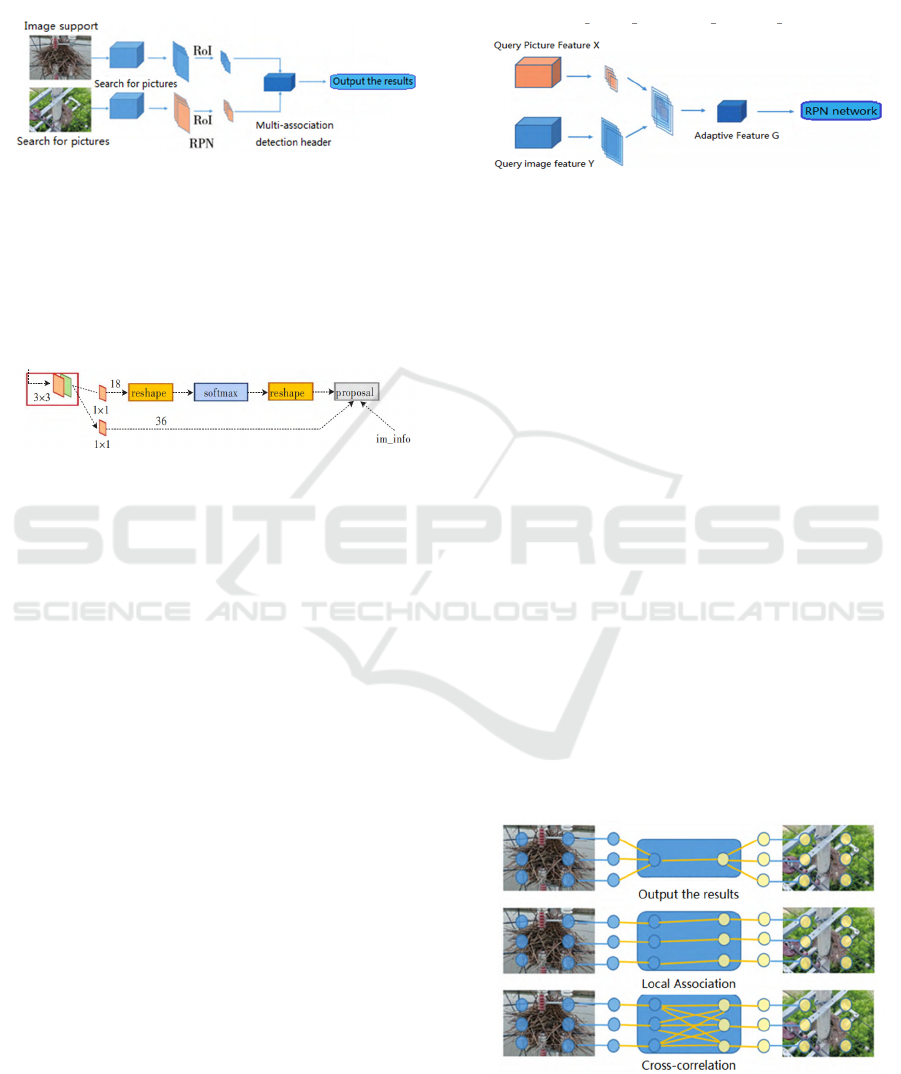
The entire process of the model is shown in Figure 1.
The image input is from the support image and the
query image input at the same time, they enter a
binary network with the same weight. The RPN
algorithm sifts for possible objects in the retrieval
image based on the relevant information of the
supporting image contained in the image (Yang
Xuejie, 2022), and then classifies and regresses the
position by the final detection head. Due to the
simplicity of the image, only 1 branch of the binary
network supporting the image is drawn. In practical
220
Dong, Y., Wang, S., Yin, X., Chen, X. and Peng, J.
The Exploration of Small Sample-Oriented Object Detection Technology in the Field of Electric Power.
DOI: 10.5220/0012278100003807
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Seminar on Artificial Intelligence, Networking and Information Technology (ANIT 2023), pages 220-223
ISBN: 978-989-758-677-4
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
application, for N categories, each category has its
own branch, and the RPN in this branch is used to
screen the potential priority of the corresponding
classification.
Figure 1: Overall structure of
twinned
network model.
The input of the improved proposal generation
policy RPN is the output of the background, and the
output of the background is a set of predicted values,
each set of predicted values represents a set of
predicted values. Figure 2 shows the overall
structure of an RPN.
Figure 2: The Overall Structure of The RPN.
In theory, the function of RPN in object detection is
to generate a potential precursor for subsequent
classification and regression work. Ideally, when an
RPN generates a candidate object, it will be
measured by its support for the object contained in
the image, rather than simply pre-and post-binary
classification (that is, binary classification).
However, the current RPN used by FASTERRCNN
can only search blindly on the image and the feature
layer of the image, resulting in the image containing
objects that do not belong to the supporting set
image, which leads to the existence of a large
number of redundant objects in the image, thus,
more work is added to the following classification
and regression calculation. At the same time,
because the number of target classes in the support
set is much smaller than that in the actual scene, the
effective prefix takes up a smaller proportion in the
prefix generated by RPN, and the quality of the
result is poor, may have a greater impact on the
subsequent classification work. This is mainly due to
the RPN algorithm in the process of proposal
generation, did not make full use of the
characteristics of supporting the centralized image,
resulting in the generation of a large number of
unrelated proposals. On this basis, an RPN model
based on adaptive target classification is proposed.
In the pre-processing, the model focuses on the
target classification related to the support set, and
eliminates the irrelevant classes, thus, the number of
pre-processing is reduced and the workload of
subsequent processing is reduced. Figure 3
illustrates the principle of adaptive improvement.
Figure 3: Principle of adaptive improvement in RPN.
Detection head classification and localization
after RPN generation of a proposal, the probe is
generally required to perform a target class score on
the proposal and then classify it. This is the most
important step in a dual-core network. A good model
requires a single detector to distinguish between
different types of data in a small sample (Zhang
Ziqian, 2022). In the binocular network, the
supporting image and the queried image are input
into the feature extraction network. After generating
the image, the feature association and matching are
completed on the probe head. The multiple
correlation probes used are shown in Figure 4.
The algorithm includes three modules: global
correlation, local correlation and cross correlation.
Among them, the global association represents the
global feature matching of the support set and the
query set on the scene scale, and the local
association represents the one-to-one feature
matching of the support set and the query set on the
pixel level and the channel The cross-correlation
represents a one-to-many pixel-level matching
between the support and query scenarios, and is used
to solve the spatial mismatch between the support
and query scenarios.
Figure 4: Multi-association detection header.
The Exploration of Small Sample-Oriented Object Detection Technology in the Field of Electric Power
221

Loss function and model training process this
paper uses a dual-card
NVIDIAGEFORCERTX3060TIGPU hardware
environment, using Python 3.7, Pytorch1.9.0,
Torchvision0.10.0, CUDA11.1, Cudnn8.0.5.
The loss function differs from the image
classification of machine vision in that object
detection requires not only the classification of
objects, but also the regression of coordinates of
objects in rectangular position boxes. On this basis,
two parallel output layers are used to implement the
corresponding output variables. The output of the
first output layer is a discrete category possibility
confidence, where p=(p0,p1,…, pK) , corresponding
to the K categories, there are (K+1 ) outputs,
which include the confidence of the K categories
and the confidence that the proposal belongs to the
background. In this case, confidence p is the(K+1)
FC layer output of the (K+1) FC layer obtained by
the software maximum, which is the offset of the
destination position boundary box. For class K
targets, the deviation is t
=t
,t
,t
,t
, where t
does not refer to the absolute position coordinates of
the regression target boundary box, but to the
corresponding position coordinates generated by
RPN.
Each trained RoI (area boundary) has a true
classification marker u and a true locator box
regression vector g. For the object detection task
described above, we use the multi-task loss function,
with RoI as the unit, to train the classification marks
and the border regression:
L=L
+L
1
L
𝑚, 𝑢, 𝑝
, 𝑔
=L
𝑚, 𝑢
+ λ
u ≥ 1
L
p
,g
2
L
𝑚, 𝑢
= −log 𝑚
is the log loss for the
category label u.
For the regression loss of the boundary box, it
was defined as: the truth variable g=(g
x
, g
y
, g
w
, g
h
)
defining the target category U boundary box and the
predicted boundary box location variable p
=
(p
,p
,p
,p
)
𝑢≥1
=
1, 𝑢≥1
0, 𝑜𝑡ℎ𝑒𝑟𝑖𝑠𝑒
(
3
)
Where u is the result of the goal category
prediction, and U = 0 is the goal framed by the
proposal in the training sample that does not support
the goal category in the set, but rather the
background, that is, a deviation has occurred in the
first classification task, so the regression error here
is meaningless.
2.2 in the process of model training, the
commonly used indexes to measure the training
effect include Precision, Recall, AP and mAP. TP
was defined as a positive sample for correct
prediction, FN as a negative sample for false
prediction, FP as a positive sample for false
prediction, and the above assessment measures were
defined as:
Prcesion =
𝑇𝑃
𝑇𝑃 + 𝐹𝑃
#
(
4
)
Recall =
𝑇𝑃
𝑇𝑃 + 𝐹𝑁
#
(
5
)
AP =
∑
𝑝𝑖
𝑛
(
6
)
mAP =
∑
𝐴𝑃
𝑘
(
7
)
3
CONCLUSION
The learning process of twin networks is divided
into two stages. In the pre-training phase, we will
improve the model's ability of multi-class image
recognition by repeated training based on the
existing standard large sample. In this paper, it is
evaluated by using the existing mAP evaluation
criteria, and it is pre-trained to reach 24.0 in the
COCO data set. In the second step, the parameters of
neural network are adjusted according to EDP data.
The basic structure of ResNet is composed of four
layers. In the retraining stage, the weights of the first
two layers of ResNet are frozen, and the information
of EDP data set is utilized, the latter two layers and
the full-connection classification layer are adjusted
to migrate the dataset.
The improved RPN algorithm is used to
recognize the small sample of twin networks. In this
method, the features of the supporting image set are
extracted by dual-core network, and the object-
related features are generated. There is still a big gap
between the twin-sub-network small sample model
proposed in this project and the existing large data
object detection technology. In the future, we will
further explore how to eliminate the interference of
complex environment, explore new model
evaluation methods, and how to make up the
difference between training samples and test
samples.
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
222

ACKNOWLEDGEMENTS
This work was supported by the National Key
Research and Development Program of China under
Grant 2020AAA0107500.
REFERENCES
Shenzhen. Research on power inspection based on small
sample machine learning [J]. Microcontroller and
embedded system applications, 2021, 21(8) : 4.
Wen Hao, Zhang Guozhi, Xiao Li, etc. Study on
transformer PD planar localization based on small
sample UHF signal [J]. Transformers, 2022, 59(4) : 6.
Xu Weili, Yuan Hegang and Kai Dong Yue, Mai Xiaoqing.
Small sample generation based on antagonism neural
network [J]. Electronic testing, 2022, 36(18) : 64-65.
Yang Xuejie, Song Kai, Cao Fuyong, etc. . Research on
the application of front-end target detection technology
in electric power patrol inspection [J]. Shandong
Electric Power Technology, 2022, 49(1) : 6.
Zhang Ziqian, Xiong Zaili, Zhang Biao, etc. Small target
detection in remote sensing image based on super-
resolution reconstruction technology[J]. Journal of
Northeast Electric Power University, 2022(002): 042.
Qinzhen Hu, Hongtao Su, Shenghua Zhou, Ziwei Liu,
Yang Yang, Jun Liu. Two-stage constant false alarm
rate detection for distributed multiple-input–multiple-
output radar[J]. IET Radar, Sonar & Navigation. 2016,
10(2), pp 264-271
Bing Wang,Guolong Cui,Wei Yi, Lingjiang Kong,Xiaobo
Yang. Constant false alarm rate performance prediction
for non-independent and non-identically distributed
gamma fluctuating targets[J]. IET Radar, Sonar &
Navigation. 2016, 10(5), pp 992-1000
Wenjing Zhao,Deyue Zou,Wenlong Liu, Minglu Jin. New
matrix constant false alarm rate detectors for radar
target detection[J]. The Journal of Engineering. 2019,
2019(19), pp 5597-5601
The Exploration of Small Sample-Oriented Object Detection Technology in the Field of Electric Power
223
