
Multi-Objective Optimization for Cost and Latency in Computing
Force Network
Shizhan Lan
1,2
, Siyuan Song
2
, Zhenyu Wang
2
and Yuxuan Long
2,*
1
China Mobile Guangxi Branch Co., Ltd, Nanning, China
2
South China University of Technology, Guangzhou, China
Keywords: Computing Force Network, Workflow Scheduling, Price-Sensitive.
Abstract: Computing Force Network (CFN) is a new infrastructure based on cloud, edge and end three-layer network
architecture. In CFN, tasks exist in the form of micro-services, so how to reduce the cost of user micro-
services and ensure the quality of service is a challenging problem. In order to solve the above problems,
firstly, we established the hierarchical model, resource limitation model, price model and time delay model
of micro-service workflow. Secondly, we modeled the micro-service scheduling problem under the computing
network into a multi-objective optimization problem with resource limitation as constraint and micro-service
cost and overall time delay as targets. Thirdly, we propose a multi-objective optimization algorithm based on
NSGA-II to solve the above problems. The experimental results show that the multi-objective optimization
model established in this paper is effective, and the multi-objective optimization algorithm proposed in this
paper is superior to the existing algorithms, which can effectively reduce the micro-service delay and cost.
1 INTRODUCTION
In recent years, with the development of technologies
such as 5G and the Internet of Things, the amount of
data in the global network has grown exponentially,
and the constantly surging amount of data has brought
huge challenges to cloud computing data centers.
Edge computing is an emerging distributed
computing paradigm. By extending the computing
capacity of cloud data centers to the edge of networks,
part of the data in the network can be processed by
the edge, relieving the pressure on cloud data centers
to some extent (J. Zhang, 2018). For example, from
large cloud data centers to scattered Mobile Edge
Computing (MEC) servers to mobile smart devices,
the traditional network architecture has gradually
evolved into cloud, edge, and end three-layer network
architecture. In order to make better use of
heterogeneous resources distributed in different
places and realize accurate matching between user
resource demand and heterogeneous resource supply,
Computing Force Network is proposed.
In CFN, tasks submitted by users are usually
divided into multiple micro-services and assigned to
different compute nodes for processing. The compute
nodes communicate and exchange data through
network connections to achieve collaborative
calculation and result summary (Islam A, 2021). In
order to ensure the QoS of user tasks, the following
aspects need to be considered.
Firstly, Cost is the key constraint. Due to the
heterogeneity of the underlying hardware of the
server and the interference of various factors, the
rental price and cost of different servers vary greatly.
However, users always hope that the rental cost will
not exceed the cost budget when renting servers to
deploy micro-services. Especially for high-
performance computing micro-services, AI
accelerator is expensive, and reasonable scheduling
of micro-services can save costs for enterprises.
Therefore, how to schedule micro service under strict
price cost budget is the primary consideration (Tang
X, 2022).
Secondly, Resource requirements are
heterogeneous. Micro-services in computing
networks have heterogeneous resource requirements.
In addition to general resource requirements such as
CPU and memory, many micro-services also require
more dimensions of resource allocation according to
specific business requirements. Therefore, the
heterogeneity of micro-service resource requirements
increases the complexity of micro-service scheduling.
Thirdly, the network becomes the bottleneck of
application QoS. The scheduling problem of micro-
services can be regarded as the scheduling of
Lan, S., Song, S., Wang, Z. and Long, Y.
Multi-Objective Optimization for Cost and Latency in Computing Force Network.
DOI: 10.5220/0012281700003807
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Seminar on Artificial Intelligence, Networking and Information Technology (ANIT 2023), pages 291-300
ISBN: 978-989-758-677-4
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
291

workflow with dependency relationship. There is a
sequence of execution among micro-services, and
there is a relationship of data transmission between
different micro-services. In the computing power
network, computing resources are connected through
the network. Optimizing the communication delay of
micro-service is of great significance to reduce
network congestion and ensure the application of
QoS.
Our contributions are multifold and can be
summarized as follows:
Firstly, considering the cost of micro-service
scheduling, we set up a cost model from the
perspective of user micro-service scheduling cost.
Secondly, we take into account the resource
constraint of micro-service scheduling. Nodes that do
not meet the resource constraint are not allowed to
serve as scheduling nodes, so as to ensure the service
quality of micro-service, which is different from
previous workflow scheduling studies.
Then, we set up a multi-objective optimization
model with resource constraints and cost and time
delay as optimization objectives.
Finally, we propose a target capture optimization
model based on NSGA-II to solve the above
problems.
2 RELATED WORK
Many scholars have carried out in-depth research on
the optimization of pricing cost and delay of micro-
service scheduling.
According to the number of scheduling objectives,
the current micro-service scheduling can be divided
into single-objective optimization micro-service
scheduling and multi-objective optimization micro-
service scheduling. In the single-objective
optimization micro-service scheduling, only one
index is optimized, so the scheduling result is too
limited. In the micro-service scheduling with multi-
objective optimization, considering multiple
constraints and optimization objectives, the
scheduling results are more applicable. According to
the types of micro-service scheduling, micro-service
scheduling can be divided into mutually independent
micro-service scheduling and workflow scheduling.
The mutually independent micro-service scheduling
does not consider the dependency between micro-
services, while workflow scheduling considers the
execution sequence of micro-services, and its
scheduling implementation is more complex. Micro-
service scheduling algorithm can be divided into
heuristic scheduling algorithm and meta-heuristic
scheduling algorithm.
For the delay problem of microservice scheduling,
H. Topcuoglu proposed a Heterogeneous earliest-
finisher (HEFT) algorithm and a Critical-Path-on-a-
Processor, heterogeneous earlier-finisher (HEFT)
algorithm (Topcuoglu H, 2002). In the CPOP
algorithm, HEFT selects the task with the highest
ascending rank value in each step and assigns the
selected task to the processor, which minimizes its
earliest completion time using the insertion-based
method. In the CPOP algorithm, the priority of each
task is calculated by comprehensively considering the
ascending and descending sort. Since the above two
algorithms were proposed, many scholars have
proposed many improved algorithms based on the
ideas of the above two algorithms according to
different problem scenarios. Xiumin Zhou et al.
proposed a heterogeneous earliest completion time
(FDHEFT) algorithm based on fuzzy dominance
sorting, which closely combines the fuzzy dominance
sorting mechanism with the list scheduling heuristic
HEFT, while optimizing the scheduling cost and
delay (Zhou X, 2019). Faragardi et al. proposed a new
resource supply mechanism and workflow scheduling
algorithm GRP-HEFT, which is used to minimize the
maximum completion time of a given workflow, so
as to meet the budget constraints of the pay-as-the-
volume cost model in modern IaaS cloud (Faragardi
H R, 2020). In view of workflow scheduling
problems, the above algorithms optimize the delay of
workflow scheduling under the condition of
satisfying workflow cost constraints. However, the
above algorithms schedule with virtual machine as
granularity, resulting in a large amount of resource
waste. Moreover, the above algorithms do not
consider the critical path of tasks as a whole, so it is
easy to fall into local optimal. In order to implement
global scheduling of micro-service, some scholars
propose to use heuristic algorithm to solve micro-
service scheduling problem. Lin et al. proposed an ant
colony algorithm for solving scheduling problems,
which not only considered the calculation of physical
nodes and the utilization rate of storage resources, but
also the number of micro-service requests and failure
rate of physical nodes. Experimental results showed
that the algorithm achieved better results in
optimizing cluster business reliability, cluster load
balancing and network transmission overhead(Lin M,
2019). Aiming at minimizing the cost of micro-
service scheduling, Hussain et al proposed a hybrid
cuckoo search and genetic algorithm HFSGA
algorithm to realize micro-service scheduling
(Hussain S M, 2022). But their approach is also
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
292
virtual machine granularity, resulting in a waste of
resources. Liang et al. proposed an heuristic micro-
service scheduling algorithm based on container to
solve the scheduling problem of application
workflow based on micro-service with minimum end-
to-end delay under user-specified budget constraints
(Bao L, 2019). This algorithm optimizes the delay of
micro-service scheduling. His method takes container
as unit for scheduling, which improves resource
utilization in the scheduling process. However, it
ignores the resource limitation of nodes. Once the
resource allocation of containers exceeds the resource
capacity of nodes, QoS applied by users will be
seriously affected、. To sum up, the existing methods
have some problems, such as too large granularity of
micro-service scheduling, ignoring resource
constraints and price and cost factors, which cannot
meet the micro-service scheduling requirements
under the computing power network.
3 SOLUTIONS
In the following, we first model the micro-service
scheduling problem under the computing network,
and then propose a heuristic algorithm based on
NSGA-II to solve the above problem model.
3.1 Subsection System Model
This scenario consists of multiple physical server
servers in geographically remote locations. The nodes
are connected over the core network. Each node has
heterogeneous resources, such as CPU, memory,
bandwidth, and GPU. User tasks are broken down
into multiple micro-services with dependencies.
Micro-services exist in the form of containers. When
users use node resources, they are rented as VMS.
Users need to pay the VM rental fee. The fee is
determined by the VM rental price per unit time and
the VM rental duration. The execution of micro-
services and data transmission between micro-
services will result in a certain delay, and the overall
delay of micro-services will affect the QoS of
applications. When the micro-service is scheduled to
a node, the amount of micro-service resources
requested cannot exceed the remaining resources of
the node. Before dispatching the service, the user will
inform the cloud manufacturer of the price
expectation and hope to obtain the highest QoS within
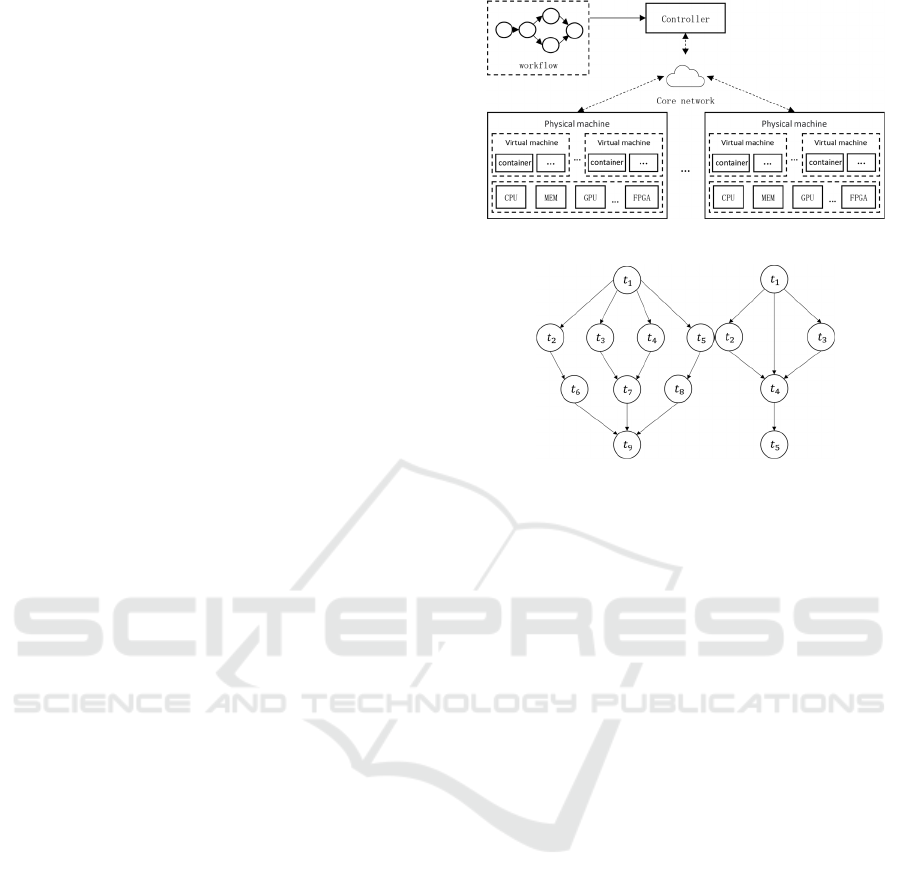
the price expectation. The system model is shown in
figure 1.
Figure 1. System model.
Figure 2. Workflow model.
3.2 Microservice Workflow Model
The workflow between microservices can be
represented by a directed acyclic graph. Figure 2
describes the workflow structure of two
microservices with dependencies.
For any microservice workflow, it can be
expressed by 𝐺
𝑇,𝐸
, where 𝑇𝑡
,𝑡
,…,𝑡
represents a set of microservices that are dependent
on each other, 𝐸𝑒
,
|𝑡
,𝑡
∈𝑇 represents a direct
dependency between microservices, If the
microservice𝑡
depends on the microservice 𝑡
, 𝑒
,
is
1, otherwise 𝑒
,
is 0. Set 𝑝𝑟𝑒𝑡
represent all
precursor nodes of microservice 𝑡
, 𝑓𝑟𝑜𝑛𝑡𝑡
represents the direct precursor of microservice 𝑡
, and
use 𝑎𝑓𝑡𝑒𝑟𝑡
to represent the direct successor of
microservice 𝑡
.
In this paper, the hierarchical workflow model
mentioned in literature(
Rizvi N, 2020
) is used to
process the above workflows. The specific process is
to divide the DAG graph into multiple microservice
chains. The entry microservice of each microservice
chain has no precursor node, and the exit
microservice has no successor node. According to the
split microservice chain, the tasks are divided into
different levels, and each level contains a set of
independent microservices. For example, workflow 1
in Figure 4 can be divided into four microservice
chains: 𝑡
-𝑡
-𝑡
-𝑡
、𝑡
-𝑡
-𝑡
-𝑡
、𝑡
-𝑡
-𝑡
-𝑡
、𝑡
-𝑡
-
𝑡
-𝑡
. In each microservice chain, microservice levels
are divided. For example, in the 𝑡
-𝑡
-𝑡
-𝑡
chain, if
Multi-Objective Optimization for Cost and Latency in Computing Force Network
293

𝑡
is the entry node, 𝑡
is the first layer, and
accordingly 𝑡
、 𝑡
、 𝑡
are the second, third, and
fourth layers respectively. Finally, for any
microservice 𝑡
, if 𝑡
is in multiple microservice
chains, the levels of 𝑡
in each microservice chain
are𝑟𝑎𝑛𝑘
、𝑟𝑎𝑛𝑘
、…、 𝑟𝑎𝑛𝑘
, the final 𝑡
level is
the highest of the preceding levels. For example, in
workflow 2 in Figure 4, 𝑡
is in the microservice
chain 𝑡
-𝑡
-𝑡
-𝑡
、 𝑡
-𝑡
-𝑡
and 𝑡
-𝑡
-𝑡
-𝑡
. The
corresponding levels of 𝑡
in each chain are 2, 1, and
2 respectively, so the final level of 𝑡
is 2.
3.3 Resource Constraint Mode
Each VM has a certain amount of heterogeneous
resources. When microservices are scheduled to
VMS, they must meet the resource restrictions of VM
nodes. Use 𝑉𝑣
,𝑣
,…,𝑣
to represent the set of
all virtual machine nodes. For any virtual machine
node v_j, there is a certain amount of heterogeneous
resources. This paper considers four heterogeneous
resources, namely CPU, memory, bandwidth, and
GPU. 𝑅
、 𝑅
、 𝑅
、 𝑅
are used to
represent the remaining amount of four
heterogeneous resources on the node at time t,
respectively. The application amount of
heterogeneous resources applied by microservice 𝑡
is expressed by 𝑟
、 𝑟
、 𝑟
、 𝑟
respectively. The 0-1 variable 𝑧
,
indicates whether
the microservice 𝑡
is scheduled to node 𝑣
. When
𝑧
,
is 1, it indicates that the microservice 𝑡
is
scheduled to 𝑣
. When 𝑧
,
is 0, it indicates that the
microservice 𝑡
is not scheduled to 𝑣
. The resource
cannot be preempted. The requested resource is
released after the microservice is executed. The
following constraints must be met during
microservice scheduling
𝑧
,
∈,
1 1
𝑟
𝑧
,
∀
∈
𝑅
2
𝑟
𝑧
,
∀
∈
𝑅
3
𝑟
𝑧
,
∀
∈
𝑅
4
𝑟
𝑧
,
∀
∈
𝑅
5
Formula (1) indicates that all microservices must
be scheduled and can only be scheduled to one node
at a time. Formulas (2) to (5) indicate that when
microservices are scheduled to any node, the number
of heterogeneous resources applied for microservices
must be less than or equal to the remaining resources
on the node.
3.4 Price-Cost Model
When a user rents a VM, the cloud vendor charges the
user a fee based on whether the user rents the VM and
the VM usage time, regardless of how many
microservice containers the user schedules on the
VM. The total price that the user needs to pay is
represented by Cost, and the calculation formula of
Cost is shown in formula (6).
𝐶𝑜𝑠𝑡 𝑝
𝑡
6
𝑡_𝑣
indicates the total duration of VM 𝑣
rental,
and 𝑝
indicates the unit price of VM 𝑣
rental. The
user will submit a price budget before microservice
scheduling, so the overall price cost should be lower
than the budget after the final microservice execution
is completed, otherwise the scheduling will fail. This
paper deals with the budget by first optimizing the
microservice delay and cost at the same time, finally
getting the Pareto frontier, and then calculating the
scheduling scheme with the lowest delay within the
budget according to the price budget. Therefore, the
final cost will be as close to the budget as possible, so
as to obtain the best QoS within the budget. The price
of a VM is related to the computing power of the VM
per unit computing resource. Generally, the higher the
price of a VM, the greater the computing power of the
VM per unit computing resource, and the shorter the
execution time of microservices.
3.5 Delay Model
In this paper, the time delay from the start of the first
microservice to the end of the last microservice will
be referred to as makespan, makespan is calculated as
𝑚𝑎𝑘𝑒𝑠𝑝𝑎𝑛max
∀
∈
𝐹𝑇
𝑡
7
Where 𝐹𝑇
𝑡
represents the total time taken from
the start of scheduling the first microservice to the
completion of the microservice 𝑡
, and formulas (7)
calculate the total time taken for all microservices to
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
294

be completed. For any microservice 𝑡
, 𝐹𝑇
𝑡
consists of two parts: 𝑊𝑇
𝑡
, the waiting time
required for task execution, and its own execution
time 𝑒𝑥𝑐
,
, where 𝑊𝑇
𝑡
and 𝐹𝑇
𝑡
are calculated
respectively.
𝑊𝑇
𝑡
max
∀
∈
𝐹𝑇𝑡
𝑡𝑟𝑎𝑛𝑠𝑡
,𝑡
8
𝐹𝑇
𝑡
𝑊𝑇
𝑡
𝑒𝑥𝑐
,
9
In the above formula, assuming that the
microservice 𝑡
is at layer n, 𝑊𝑇
𝑡
represents the
total time taken for the first layer N-1 microservices
to complete. 𝑡𝑟𝑎𝑛𝑠𝑡
,𝑡
indicates the data
transmission delay of the precursor node 𝑡
of
microservice 𝑡
. If the containers of microservice 𝑡
and microservice 𝑡
are scheduled to the same VM,
the delay is ignored. Otherwise, the delay is the ratio
of the size of the data transfer between the two
microservices to the average bandwidth allocated by
the container in which the two microservices reside.
Assuming that the amount of data transfer between
microservice 𝑡
and microservice 𝑡
is 𝑙𝑒𝑛𝑔𝑡ℎ
,
, the
formula for calculating 𝑡𝑟𝑎𝑛𝑠𝑡
,𝑡
is:
𝑡𝑟𝑎𝑛𝑠𝑡
,𝑡
0
𝑙𝑒𝑛𝑔𝑡ℎ
,
𝑟
𝑟
/2
10
𝑒𝑥𝑐
,
indicates the execution delay required to
schedule microservice 𝑡
to node 𝑣
. The delay is
negatively correlated with the computing power per
unit computing resource of the VM. This paper
assumes that the delay is known.
3.6 Overall Model Design
Generally, the price of a virtual machine is related to
the computing power per unit of computing resource
of a virtual machine. The higher the price of a virtual
machine, the greater the computing power per unit of
computing resource of a virtual machine, and the
shorter the execution time of a microservice.
However, the size of virtual machine computing
power and the price of virtual machine is not a
constant proportion, under normal circumstances, the
price of virtual machine is far more than doubled
when the virtual machine computing power is
doubled. Therefore, excessive pursuit of delay
reduction will make the final price exceed the user's
cost budget. Similarly, if only lower cost is required,
the delay of the entire application will increase,
affecting the QoS of the application. Therefore, the
optimization direction of price cost and delay is not
consistent, so that both objectives can be optimized,
so that a relatively optimal scheduling scheme can be
obtained under each price budget. Combined with the
above problem description and the general model
formula of multi-objective optimization introduced in
Section 4.2, the above problem is modeled into a
multi-objective optimization model in this paper, as
shown below.
The objective function is:
𝐶𝑜𝑠𝑡𝑀𝑖𝑛 𝑝
𝑡
11
𝑚𝑎𝑘𝑒𝑠𝑝𝑎𝑛𝑀𝑖𝑛 max
∀
∈
𝐹𝑇
𝑡
The relevant constraints are:
𝑧
,
∀
∈,
1
𝑟
𝑧
,
∀
∈
𝑅
𝑟
𝑧
,
∀
∈
𝑅
𝑟
𝑧
,
∀
∈
𝑅
𝑟
𝑧
,
∀
∈
𝑅
In this paper, the process of solving the final
scheduling scheme is divided into two steps: the first
step is to obtain a set of uniformly distributed feasible
solutions by solving the above multi-objective
optimization model, that is, Pareto optimal front; The
second step is to solve the optimal scheduling scheme
according to the price budget set by the user.
3.7 Muti-Objective Optimization
Algorithm Based on NSGA-II
Figure 3 shows the flow chart of the algorithm. The
input of the algorithm is microservice set, virtual
machine node set, and user price expectation, and the
output of the algorithm is Pareto optimal frontier.
In NSGA-II algorithm, the common encoding
methods include binary encoding, symbol encoding
and real encoding. The traditional binary coding and
decoding process is more troublesome, but the real
coding reduces the complexity of calculation and
improves the efficiency of operation. The goal of this
paper is to schedule m microservice containers to be
scheduled on n virtual machine nodes. Based on the
characteristics of the problems studied in this paper,
the real coding mode is selected, as shown in Figure
4. The numbers 1-9 represent the microservice to be
scheduled, Node1 to Node5 represent the number of
the VM node that can be scheduled, and the number
corresponding to the server node number indicates
Multi-Objective Optimization for Cost and Latency in Computing Force Network
295

that the microservice is scheduled to the
corresponding VM node. For example,
((1,4),(6,7),(2,3,9),(5,8)) indicates a possible initial
solution. Resource constraints must be satisfied when
generating the initial feasible solution. In order to
generate the initial population, this paper randomly
generates x initial solutions and the initial population
𝑃𝑆
,𝑆
,...,𝑆
.
Figure 3. NSGA-II Algorithm Flowchart.
Figure 4. Coding Scheme.
The initial population was sorted according to the
fitness function. The input of fast non-dominated
sequencing was the original population P and the
output was the stratified population 𝑃
.
For the parent population 𝑃𝑆
,𝑆
,...,𝑆
. For
any individual 𝑆
, calculate the values of objective
function 1 and objective function 2 of S_i. If for any
other individual 𝑆
in the population, 𝑆
does not have
a pareto dominance over 𝑆
then divide 𝑆
into the
first non-dominated layer and traverse the population
successively to find all the individuals meeting the
above conditions. Divide all of the above individuals
into the current tier and delete all of the above
individuals into the current tier from the original
population.
The number of non-dominant layers of the
population is increased by one each time, and the
above steps are repeated until there are no individuals
in the original population, and finally the stratified
population 𝑃
𝑆
,𝑆
,...,𝑆
.The number of
non-dominated levels of an individual represents the
quality of the solution, and the smaller the number of
non-dominated levels, the better the performance of
the individual and the closer to the optimization goal.
The crowding degree 𝑖
of each individual in each
layer of the stratified population 𝑃
was calculated in
turn. The degree of crowding represents the density
of individuals around an individual in the population,
and the value is equal to the circumference of the
rectangle with the vertex near the point. Let the
crowding degree of individuals 𝑂
and 𝐼
at the
boundary position be ∞, and the formula for
calculating the crowding degree of individuals at the
other positions be
𝑖
│𝑓
𝑓
│
│𝑓
𝑓
│
12
m is the number of fitness evaluation functions,
𝑓
and 𝑓
represent the function value of the JTH
objective of the i+1 individual and the I-1 individual,
respectively, 𝑓
and 𝑓
represent the maximum
and minimum objective function values of all
individuals in the current level for the objective j,
respectively.
The elite selection strategy is based on non-
dominant ordering and crowding distance to obtain
progeny populations. Suppose that for the stratified
population 𝑃
𝑆
,𝑆
,...,𝑆
, each layer is
sorted in ascending order by crowding distance, and
the steps selected by the elite are: All the individuals
from the first layer in 𝑃
were added to the new
population P, and then all the individuals from the
second layer were added to the new population P, and
so on, until the individuals from a certain layer could
not all be added to the new population P, and the
individuals from that layer were added to P in the
order of the crowding degree distance, until the
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
296
number of individuals in the new population P
reached x, as shown in Figure 5.
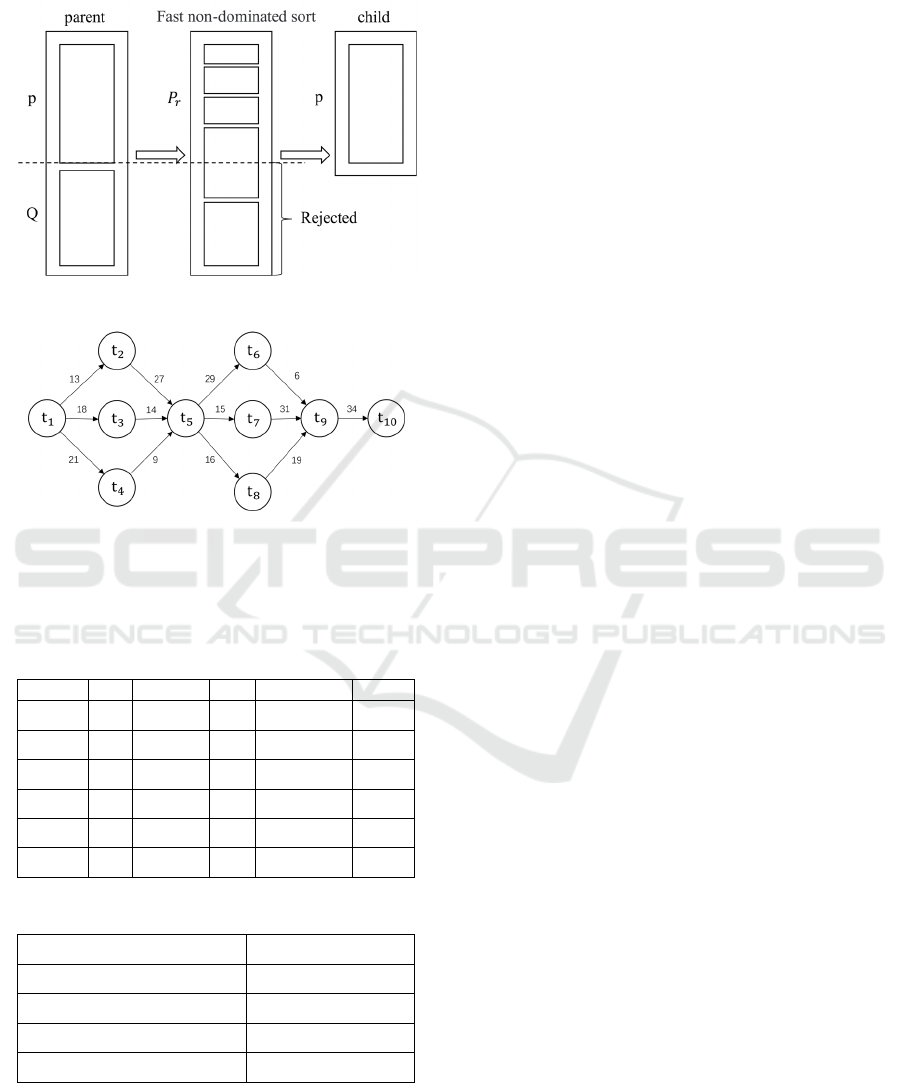
Figure 5. Fast non-dominated sorting algorithm
Figure 6. Workflow
4 EXPERIMENT
Table 1. Specifications and Prices of the Six VMS.
Instance CPU Memory GPU Bandwidth cost
𝑣
4 16 4 100 30.39
𝑣
4 16 8 100 60.94
𝑣
8 32 16 100 130.88
𝑣
6 32 24 100 150.09
𝑣
8 40 32 100 180.04
𝑣
16 40 32 100 190.10
Table 2. NSGA-II Parameter Setting.
Parameter number
Size 50
Number of iterations 50
Cross probability 1
Mutation probability 0.1
In this section, the NSGA-II-based microservice
scheduling algorithm is tested using the Cloudsim
simulation platform, which has the modeling and
simulation functions of physical machines and
containers. This paper first analyzes several common
workflow structures in Alibaba Cluster Trace
Program, and constructs DAG graphs with 5, 10, 15
and 20 microservices respectively by referring to
common workflow structures. Figure 6 shows the
DAG diagram when the number of microservices is
10, and the weights on the edges of the diagram
represent the size of the data transfer volume of the
microservices with dependencies.
The specifications and prices of the VMS used in
the experiment refer to the cloud vendor's charging by
volume rules. Table 1 lists the specifications and
prices of the six VMS used in this paper.
The parameter Settings of an algorithm largely
determine the performance of the algorithm. Table 2
lists the parameters of the algorithm in this paper.
Price and microservice delay are used as
evaluation indexes for microservice scheduling. The
calculation formulas for the above two are formula
(6) and formula (7) respectively. To verify the
performance of the scheduling algorithms in this
paper, the Spread, Binpack, and HEFT algorithms are
selected as benchmarks. Spread and Binpack
algorithms are common methods in container
scheduling. Spread tends to distribute containers to
each node to balance cluster load, while Binpack
tends to dispatch containers to one node to improve
resource utilization. HEFT algorithm is a classic
algorithm in workflow scheduling. Its idea is to
always schedule tasks to the node with the minimum
completion time. However, HEFT algorithm
schedules tasks based on virtual machines and does
not consider resource constraints during scheduling.
The HEFT is changed to a HEFT algorithm that
schedules by container and considers resource
constraints.
Figure 7 shows the scheduling success rates of the
four algorithms at different price expectation levels.
Subgraphs (a), (b), (c) and (d) respectively show the
scheduling success rates of four algorithms with DAG
sizes of 5, 10, 15 and 20. The higher the price
expectation level, the more adequate the price budget
given by the user. Because the Spread scheme tends
to schedule microservices to different nodes, a large
number of virtual machines are rented, and the data
transmission delay between microservices becomes
longer, which ultimately makes scheduling
impossible under the condition of meeting the price
constraint. The Binpack scheme tends to schedule
microservices to a node, so the number of leased
virtual machines is small and the communication
delay between microservices is reduced, which can
meet the price constraint to a certain extent, but it
Multi-Objective Optimization for Cost and Latency in Computing Force Network
297

(a) 5 microservices
(b) 10 microservices
(c) 15 microservices
(d) 20 microservices
Figure 7. Success Rate.
cannot take into account the global scheduling, so it
cannot meet the scheduling demand when the price
constraint level is high. The HEFT algorithm always
schedules microservices to the node with the shortest
completion time, without considering the global
scheduling and scheduling cost, so the scheduling
result is difficult to meet the cost expectation set by
users. The NSGA-II-based microservice scheduling
algorithm proposed in this paper also optimizes the
scheduling delay and cost of microservices, so the
scheduling success rate of the algorithm proposed in
this paper exceeds other algorithms.
Figure 7 shows the scheduling delay of four
microservice algorithms under four microservice
scales and different price expectations. Subfigures
(a), (b), (c), and (d) show the experimental results
when DAG scales are 5, 10, 15, and 20 respectively.
It can be seen from the figure that with the increase of
price expectation, the delay of various algorithms
shows a non-increasing trend. Among them, the
algorithm proposed in this paper can obtain lower
microservice delay compared with other algorithms
under the same price expectation. When the price
expectation increases to a certain value, the delay will
no longer decrease, and higher QoS can no longer be
obtained when the price expectation is increased. The
above phenomenon is in line with normal logic,
because microservice execution and data
transmission will certainly cost a certain delay, and
the computing power of virtual machine nodes and
the transmission capacity of the network are limited,
so the delay can not be reduced. From the
experimental results, it can be seen that the algorithm
proposed in this paper can find the global relative
optimal scheduling scheme under the user-set price
expectation. For example, under 5 microservices,
when the user price expectation is 2, only the
algorithm in this paper and the Binpack algorithm can
give the scheduling scheme under the price
expectation, and the other two algorithms fail to
schedule. When the user's price expectation is 2.6, the
algorithm in this paper obtains a lower delay than
Binpack and Spread, so the user pays the same price,
and the algorithm in this paper can obtain higher QoS.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
1234
sucess rate
Price expectation level
NSGA-II HEFT Spread Binpack
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
1234
sucess rate
Price expectation level
NSGA-II HEFT Spread Binpack
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
1234
sucess rate
Price expectation level
NSGA-II HEFT Spread Binpack
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
1234
sucess rate
Price expectation level
NSGA-II HEFT Spread Binpack
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
298
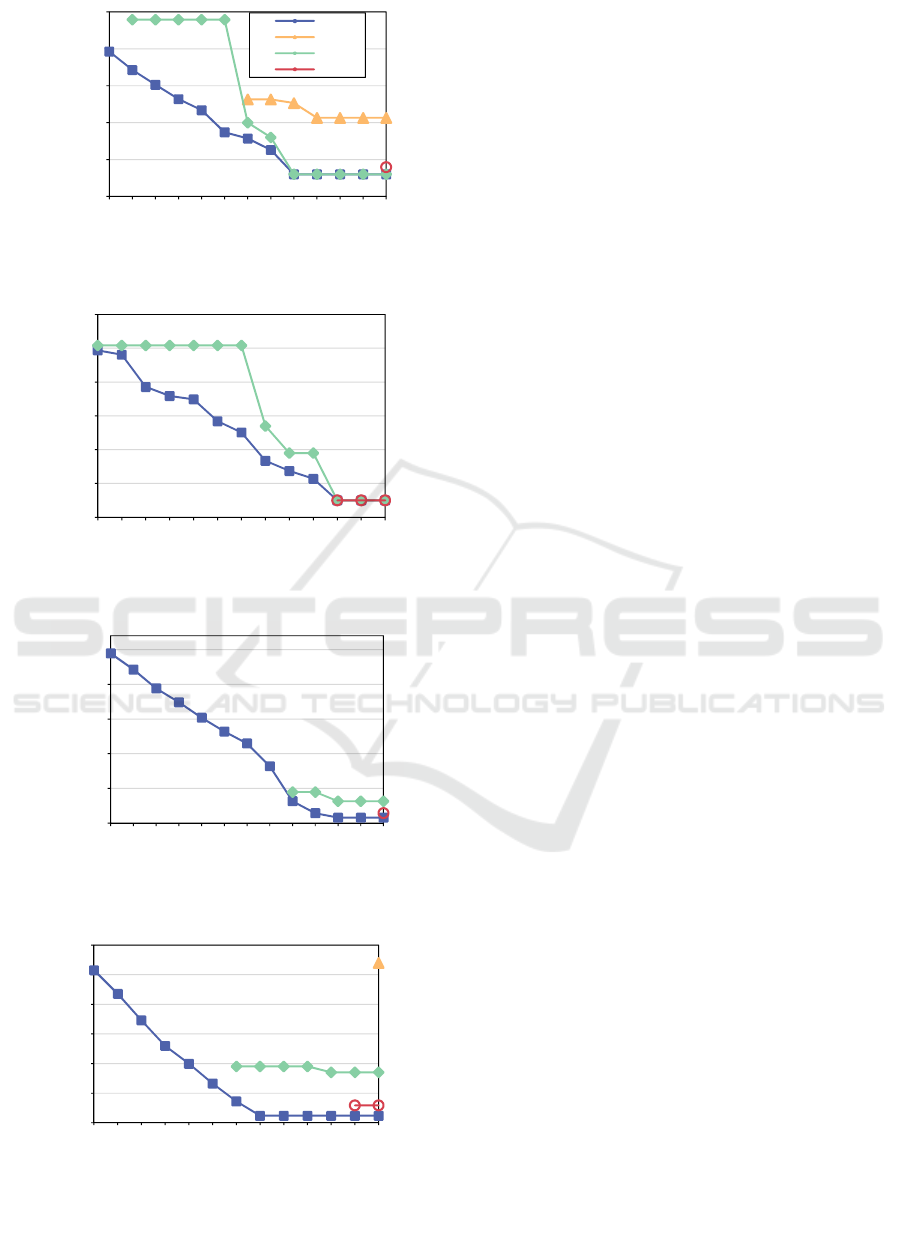
(a) 5 microservices
(b) 10 microservices
(c) 15 microservices
(d) 20 microservices
Figure 8. Scheduling delay in different DAGs.
In summary, the multi-objective optimization
algorithm proposed in this paper can optimize both
delay and price, and can select the relatively optimal
scheduling scheme from the Pareto frontier solution
according to the price expectation set by users, which
improves the scheduling success rate and reduces the
microservice delay. The algorithm proposed in this
paper provides a solution for the price-sensitive
microservice scheduling under the computing power
network.
5 CONCLUSION
This paper first analyzes the microservice scheduling
problem under the CFN, then we introduce the
relevant theories and technologies of multi-objective
optimization, and models the scheduling problem of
microservice under the computing network into a
multi-objective optimization problem. Finally, a
multi-objective optimization algorithm based on
NSGA-II is proposed to solve the above problem
model. The experimental results show that the
proposed algorithm can optimize both the price cost
and the microservice delay, and finally give a
relatively optimal scheduling scheme according to the
price expectation set by the user.
The microservice scheduling model constructed
in this paper does not take into account the oversold
problem of resources, that is, the amount of resource
applications of containers on a virtual machine node
can be greater than the total amount of resources
owned by the virtual machine. Further research can
be carried out in the future.
REFERENCES
J. Zhang, B. Chen, Y. Zhao, X. Cheng and F. Hu, "Data
Security and Privacy-Preserving in Edge Computing
Paradigm: Survey and Open Issues," in IEEE Access,
vol. 6, pp. 18209-18237, 2018,
https://doi.org/10.1109/ACCESS.2018.2820162
Islam A, Debnath A, Ghose M, et al. A survey on task
offloading in multi-access edge computing (J). Journal
of Systems Architecture, 2021, 118: 102225.
https://doi.org/10.1016/j.sysarc.2021.102225
Tang X, Cao W, Tang H. Cost-Efficient Workflow
Scheduling Algorithm for Applications With Deadline
Constraint on Heterogeneous Clouds (J). IEEE
Transactions on Parallel and Distributed Systems,
2022, 33(9): 2079–2092.
https://doi.org/10.1109/TPDS.2021.3134247
Topcuoglu H, Hariri S, Society I C. Performance-effective
and low-complexity task scheduling for heterogeneous
50
60
70
80
90
100
1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3 3,2 3,4 3,6 3,8
delay/s
cost expectation
NSGA-II
Spread
Binpack
HEFT
80
90
100
110
120
130
140
2,4 2,6 2,8 3 3,2 3,4 3,6 4 4,2 4,4 4,6 4,8 5
delay/s
cost expectation
75
80
85
90
95
100
3,6 3,8 4 4,2 4,4 4,6 4,8 5 5,2 5,4 5,6 5,8 6
delay/s
cost expectation
120
130
140
150
160
170
180
6 6,4 6,8 7,2 7,6 8 8,4 8,8 9,2 9,6 10 10,4 10,8
delay/s
cost expectation
Multi-Objective Optimization for Cost and Latency in Computing Force Network
299

computing (J). IEEE Transactions on Parallel and
Distributed Systems, 2002, 13(3): 260–274.
https://doi.org/10.1109/71.993206
Zhou X, Zhang G, Sun J. Minimizing cost and makespan
for workflow scheduling in cloud using fuzzy
dominance sort based HEFT (J). Future Generation
Computer Systems, 2019, 93: 278–289.
https://doi.org/10.1016/j.future.2018.10.046
Faragardi H R, Reza M, Sedghpour S. GRP-HEFT : A
Budget-Constrained Resource Provisioning Scheme for
Workflow Scheduling in IaaS Clouds (J). IEEE
Transactions on Parallel and Distributed Systems,
2020, 31(6): 1239–1254.
https://doi.org/10.1109/TPDS.2019.2961098
Lin M, Xi J, Bai W. Ant Colony Algorithm for Multi-
Objective Optimization of Container-Based
Microservice Scheduling in Cloud (J). IEEE Access,
2019, 7: 83088–83100. https://doi.org/10.1109
/ACCESS.2019.2924414
Hussain S M, Begh G R. Hybrid heuristic algorithm for
cost-efficient QoS aware task scheduling in fog–cloud
environment (J). Journal of Computational Science,
Elsevier B.V., 2022, 64(January): 101828.
https://doi.org/10.1016/j.jocs.2022.101828
Bao L, Wu C, Bu X, et al. Performance Modeling and
Workflow Scheduling of Microservice-Based
Applications in Clouds(J). IEEE Transactions on
Parallel and Distributed Systems, IEEE, 2019, 30(9):
2101–2116.
https://doi.org/10.1109/TPDS.2019.2901467
Rizvi N, Ramesh D. HBDCWS: heuristic-based budget and
deadline constrained workflow scheduling approach for
heterogeneous clouds (J). Soft Computing, Springer
Berlin Heidelberg, 2020, 24(24): 18971–18990.
https://doi.org/10.1007/s00500-020-05127-9
ANIT 2023 - The International Seminar on Artificial Intelligence, Networking and Information Technology
300
