
Analysis of Reduced Performance of 7.5 kW Hydraulic Pump Motor
on Telescopic Spreader Quayside Container Crane (QCC)
Erman Suherman
a
and Ahmad Rofii
b
Department of Electrical Engineering, Universitas 17 Agustus 1945 Jakarta, Jl. Sunter Permai Raya, Sunter Agung,
Tanjung Priok, Jakarta Utara, Indonesia
Keywords: Hydraulic Motor, Telescopic Spreader, Varnishing.
Abstract: Quayside Container Crane (QCC) is one of the heavy equipment used by the Nusantara Port Handal company.
The Telescopic Spreader is one of the equipment found on the Quayside Container Crane (QCC). The
mechanical power for the QCC work process comes from an induction motor or asynchronous motor. In
operation, lifting power often weakens, causing business processes to idle. QCC mechanical resources come
from induction motors or asynchronous motors, of course the work process depends on the reliability of the
motor. Based on monitoring and recording, the induction motor used by QCC with a capacity of 7.5 kW often
experiences a weakening of rotational power during busy work activities. After measuring the temperature
when the induction motor was loaded, the temperature reached 44
0
C and after measuring the motor stator
resistance value, it was 1200MΩ. Based on the analysis, the increase in motor temperature caused a decrease
in lifting power due to a decrease in the Insulator Resistance value which caused voltage leakage between the
armature windings. Motor resistance decreases due to the reduced ability of the stator insulator due to
increased heat, with a decrease in lifting capacity based on measurement results causing the vibration value
to increase from the threshold, thereby disrupting the construction of the stator armature. To overcome this,
re-varnishing of the insulator has been carried out which results in an increase in the resistance value of the
stator insulator.
1 INTRODUCTION
Indonesia is the largest archipelagic country in the
world. For this reason, Indonesia needs to manage
and develop a well-managed and developed port
industry (Setiono, 2010).
Handling of loading and unloading goods must be
in accordance with the provisions that have been set.
With these provisions, it is hoped that all stevedoring
companies can implement these provisions in order to
create a smooth flow of goods and harmony in work.
But in practice the handling of loading and unloading
is not always carried out smoothly and correctly, but
few of them ignore it. Most of these stevedoring
companies are only concerned with profits without
paying attention and thinking about the impacts that
will arise if the handling of loading and unloading is
carried out unsafely and incorrectly or not in
accordance with the provisions (Triatmodjo, 2006).
a
https://orcid.org/0009-0001-9164-1641
b
https://orcid.org/0009-0006-0677-9846
Quayside Container Crane (QCC) is one of the
heavy equipment used by Nusantara Pelabuhan
Handal. This tool stands and runs on rails on the edge
of the dock with a power source from a power plant
on land or with the power plant's own diesel engine.
The working principle is simple, the container from
the ship's hold is lifted up by a telescopic spreader
using a hoist system, then with horizontal movement
is carried using a trolley system towards the dock and
stops between the two crane legs (legs) to lower the
container until it is right above the truck chassis body.
The next movement is to return the empty telesopic
spreader from its position on the dock to the ship's
hold, and land the telescopic spreader on top of the
container to be unloaded next. (Lasse, 2012).
Container loading and unloading activities on
ships often occur system failures in the telescopic
spreader area. Especially often trips occur on spreader
pumps, telescopic positions from 20 feet to 40 feet
Suherman, E. and Rofii, A.
Analysis of Reduced Performance of 7.5 kW Hydraulic Pump Motor on Telescopic Spreader Quayside Container Crane (QCC).
DOI: 10.5220/0012584600003821
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 4th International Seminar and Call for Paper (ISCP UTA ’45 JAKARTA 2023), pages 449-457
ISBN: 978-989-758-691-0; ISSN: 2828-853X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
449

often cannot or jam, twistlocks that cannot rotate from
the unlock position to the lock position even until the
replacement of the spreader pump motor because its
performance has dropped.
2 LITERATURE REVIEW
2.1 Telescopic Spreader
Telescopic Spreader is one of the equipment
contained in Quayside Container Crane (QCC).
Telescopic Spreader is made of steel structure
consisting of 4 twistlocks on the head block, 4
twistlocks for locking corner containers, 4 flippers
installed in each corner of the spreader connected to
a gearbox and actuator that functions as a guide,
telescopic device and hydraulic system, with
automatic opening and locking based on several
proximity sensors.
Telescopic mechanism with an expansion range
of 20 feet to 45 feet, controlled by the Siemens 7 PLC
system integrated with all other devices.
Figure 1: Telescopic Spreader.
2.2 Asynchronous Motor
Induction motors are the most widely used alternating
current (AC) motors. Its naming comes from the fact
that the rotor current of this motor is not obtained
from a specific source, but is an induced current.
As a result of the relative difference between the
rotation of the rotor and the rotating magnetic field
generated by the stator current. Induction motors are
the most commonly used motors in various industrial
equipment. Its popularity is due to the design it gets,
and it can be directly connected to an AC power
source.
Figure 2: Three Phase Induction Motor on hydraulic pump
Telescopic Spreader.
2.3 Stator
In the stator section there are several slots that are
where the wire (conductor) of three coils each
different phase and receive current from each phase
called the stator coil. The stator consists of iron plates
arranged as large as the rotor and on the inside has
many grooves that are given coils of insulated copper
wire.
Figure 3: Stator.
If the stator coil gets a three-phase current supply,
the coil will generate a rotary magnetic flux. Due to
the rotating magnetic flux in the stator coil, it causes
the rotor to rotate due to magnetic induction with the
rotational speed of the syncon rotor with the
rotational speed of the stator.
Where:
ns = Synchronous speed (rpm)
ƒ = Magnitude of frequency (Hz)
P = Number of poles
The construction of the induction motor stator itself
consists of several parts:
1. Motor body (axle)
2. Magnetic polar core and magnetic amplifier
circumference
3. Slip ring
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
450
2.4 Rotor
Based on Faraday's law of magnetic impact, the
rotating field, which is relatively a magnetic field
moving against the rotor conductor, will wave the
electromotive force (ggl). The frequency of this
impact emf is the same as the frequency of the mesh.
The magnitude of this impact is directly
proportional to the relative speed between the rotating
field and the rotor conductor. Conductor - a conductor
in the rotor that forms a closed circuit, is a driving
circuit for rotor current and is in line with the
applicable law, particulary the law of lenz.
The direction is against the impacting fluctuation,
in this case the rotor current is caused by the
difference in speed between the fluctuation or
rotational field of the stator and the conductor at rest.
The rotor will rotate in the same direction as the
direction of the stator rotation field, to reduce the
speed difference above. If the rotor is loaded, then the
rotation of the rotor will drop so that there is a
difference in rotation speed between the rotor and
stator, this difference in rotation speed is called slip.
Figure 4: Rotor.
2.5 Working Principle of Induction
Motor
The induction motor works on the basis of
electromagnetic induction from the stator coil to its
rotor coil. When the stator coil of a 3-Phase induction
motor is connected to a 3-Phase voltage source, the
stator coil will produce a rotating magnetic field. Flux
force lines The data induced from the stator coil will
cut the rotor coil so that emf (ggl) or induced voltage
arises. Because the conductor (coil) of the rotor is a
closed circuit, current will flow on the rotor coil. The
conductor (coil) of the rotor that is supplied by this
current is in the line of flux force coming from the
stator coil so that the rotor coil will experience
Lorentz force which causes torque that tends to move
the rotor according to the direction of movement of
the stator induction field.
2.6 Calculation Procedure
In the research analysis of the performance of the 3
Phase induction motor on the loading of telescopic
spreader pressure, data will be taken based on current
and voltage variations, specifically minutes to 09.00,
minutes to 11.00, minutes to 14.00, and minutes to
16.00, This data collection aims to obtain the value of
losses on the motor based on pressure variations,
determine efficiency based on pressure variations,
and to obtain Power factor (PF) = 95%. So data
collection is carried out including:
1. Find the input power based on the formula
below. In this case, measurements are made
directly on the motor. To find out the input
power value, calculations are carried out with
the equationv(Rofii, A. 2018):
Pin =
(2)
Information:
P in = Input power (Watts)
V = Voltage (Volt)
I = Current (Ampere)
= power factor
2. Determine the value of losses in a 3 Phase
induction motor as a telescopic spreader
drive. Calculation of losses on the motor
using the equation:
P loses = mechanical (3)
Electricity loses (Stator winding) =
(4)
Electrical loses (Rotor winding) =P
Nominal losses
3. Finding the output power of a 3 phase motor
P Out = P in – P loses (5)
Information:
P in = Daya input (watt)
P Out = Daya output (watt)
P loses = total loses (watt)
4. Determine the efficiency value of motor
performance degradation based on the input
and output power of the motor.
To get the efficiency value of the
performance of the induction motor on the
telescopic spreader, calculations are carried out
using the equation:
Efficiency =
(6)
Information:
: daya output (Watt)
: input power (Watts)
Analysis of Reduced Performance of 7.5 kW Hydraulic Pump Motor on Telescopic Spreader Quayside Container Crane (QCC)
451
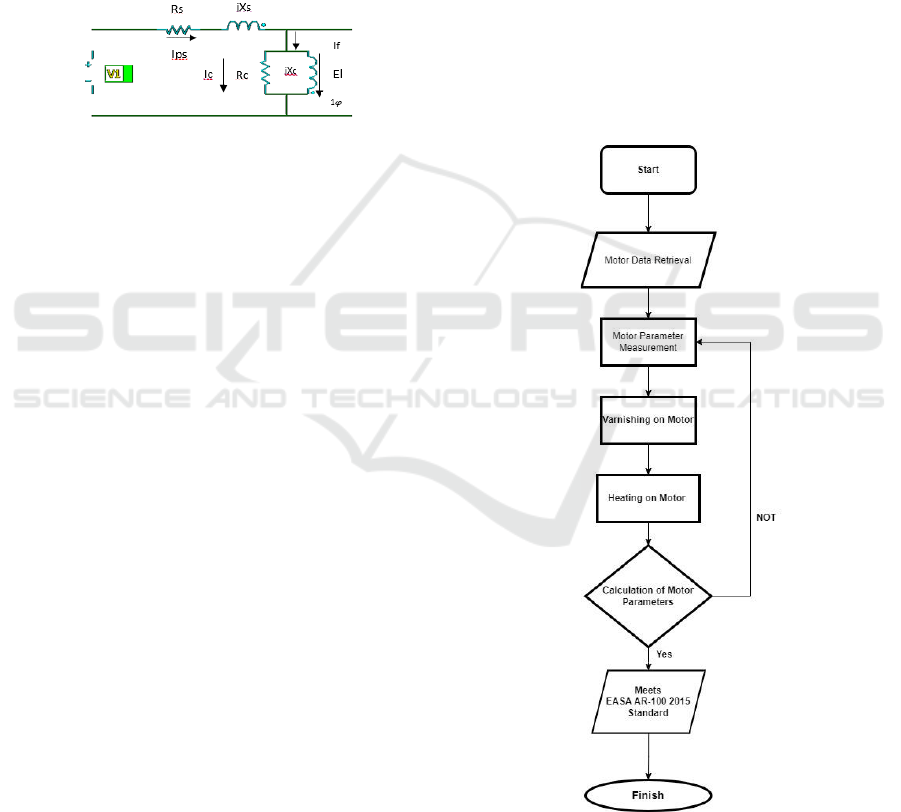
2.7 Equivalent Circuit of Three-Phase
Induction Motor
The equivalent circuit of a three-Phase induction
motor is expressed in a one-Phase circuit, consisting
of:
A. Stator Equivalent Circuit
If the resistance of the stator winding per phase is Rs,
and the reactance is Xs, while the core losses are
expressed in parallel to a resistance Rc and reactance
Xc, then the equivalent circuit of the stator can be
illustrated in Figure 5 below.
Figure 5: Stator Equivalent Circuit.
The impact voltage on the stator is:
(7)
Where:
Kw1 = Stator winding factor
F = Stator Voltage Frequency
φm = Maximum Fluctuation in the Stator Gap
N1 = Number of Stator Windings
In Figure 5, V1 is the voltage source per Phase on
the stator of the induction motor and E1 is the impact
voltage on the stator then:
(8)
3 RESEARCH METHODS
3.1 Place and Time of Research
This research was conducted at PT. Parvi Indah
Persada NPH Building Jl. Kebon Bawang 1 No.45,
Kebon Bawang Tanjung Priok, North Jakarta, 14320.
The time used by the researcher for this research is
carried out from the date of issuance of the research
permit within a period of approximately 2 (two)
months.
3.2 Research Tools and Materials
Telescopic spreader hydraulic pump motor as
material / object of research, Megger to measure
insulation resistance (Insulation Resistance),
Multitester to measure resistance value (resistance),
Temperature Gun to measure motor temperature and
Vibartion Meter to measure motor vibration.
3.3 Research Variables
a. Phase to phase isolation resistance
b. Isolation Resistance with phase to ground
c. Source voltage (droop or stable)
d. Motor temperature
3.4 Data Collection Techniques
In terms of collecting this data, the author plunges
directly into the object of research to get valid data,
then the researcher uses direct observation methods
and documentation observation. The following are
the steps to obtain data by taking direct prisoner
measurements.
Figure 6: Research Flowchart.
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
452
3.5 Discussion Method
Based on the availability of calculated data,
measuring data and standard data, discussions are
carried out:
1. The effect of decreasing insulation resistance
on the rotating power of the motor
2. Effects of temperature rise on insulation
resistance
3. The effect of vibration on the rotating power of
the motor
Then analysis can be done from these three
influences, which one has the most potential to cause
a decrease in the performance of the hydraulic pump
motor on the telescopic spreader.
4 DISCUSSION
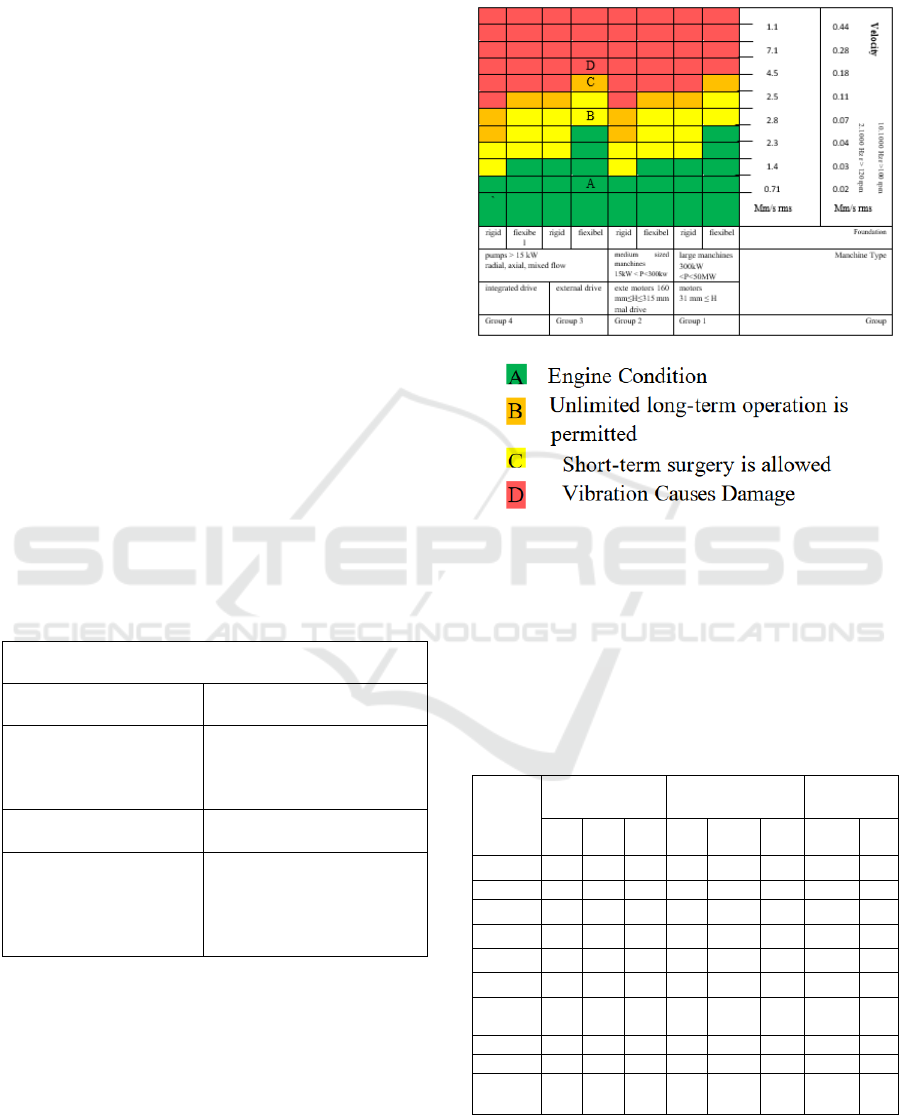
4.1 Data Standard Insulation
Resistance
The following is a list of the use of Insulation
resistance Test direct voltage against each winding
rated voltage based on EASA (Electrical Apparatus
Service Association) AR100-2015 Standard
Insulation.
Table 1: Standard Insulation Resistance at PT. Parvi Indah.
Recommended Minimum Insulation Resistance Values at
400C
Minimum Insulation
Resistance After 1 min
Test Specimen
IR 1 min = kV + 1
Mega Ohm Unit
Most windings were made
before about 1970, all terrain
windings and others are not
described below
IR = 100 M
Most AC rolls were built after
about 1970 (coil roll form)
IR = 5 M
As a large machine with
random winding stator coil,
forming a coil roll with a
voltage below 1 kV DC
armature
4.2 Vibration Standards
Table 2: Vibration Standards at PT. Parvi Indah Persada.
In the table above where the green color has good
engine condition and dark yellow color has
unlimited long-term operation allowed while light
yellow has short-term operation allowed and pink
has vibration causing damage.
A. Vibration Motor Pump Spreader Telescopic
Table 3: Vibration Tests on No-Load Telescopic Spreader
Pump Motors.
Time
Drive End
(DE)mm/s
Non Drive End
(NDE)mm/s
Temperature
(
0C)
Horiz
ontal
Verti
cal
Axial
Horiz
ontal
Vertica
l
Axial
OF
ND
08.00
0.9
0.7
0.6
0.7
0.9
0.7
37
37
09.00
0.9
0.7
0.6
0.7
0.9
0.7
36
37
10.00
0.9
0.8
0.7
0.8
0.9
0.7
37
37
11.00
0.9
0.8
0.8
0.8
0.9
0.7
37
38
11.45
0.9
0.8
0.8
0.9
0.9
0.7
38
39
13.15
0.9
0.8
0.8
0.9
0.9
0.7
39
40
14.00
0.9
0.8
0.8
0.9
0.9
0.8
40
41
15.00
0.9
0.8
0.8
0.9
0.9
0.8
40
41
16.00
0.9
0.8
0.8
0.9
0.9
0.8
41
41
17.00
0.9
0.9
0.8
0.9
0.9
0.8
43
42
Analysis of Reduced Performance of 7.5 kW Hydraulic Pump Motor on Telescopic Spreader Quayside Container Crane (QCC)
453
4.3 Motor Vibration Measurement
Measurement of the vibration of the telescopic
spreader hydraulic pump motor using a vibration
meter at several points on the motor body with the
position of the tip of the tool placed horizontally,
vertically and axial.
The increase in temperature of the telescopic
spreader hydraulic pump motor when without load in
the table above is caused by an increase in vibration.
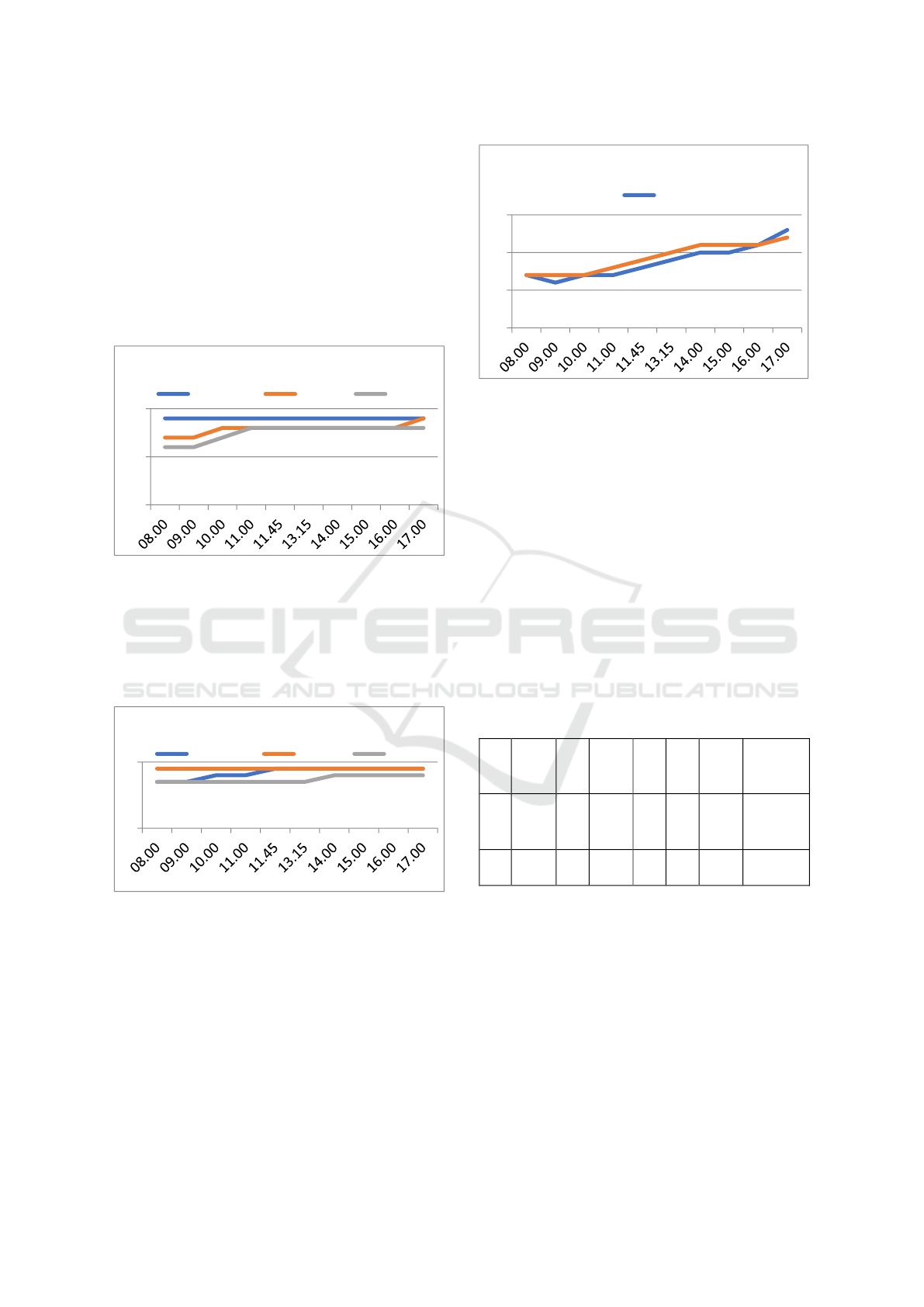
Figure 7: Telescopic Spreader Motor DE Vibration Graph.
In the chart above for the horizontal is the same
amount of 0.9 while the smallest vertical is 0.7 at time
08.00 and 09.00 and the greatest is 0.9 at time 17.00
for axial is the smallest 0.6 at time 08.00 and 09.00
and the greatest is 0.8 at time 11.00 to 17.00.
Figure 8: Telescopic Spreader Motor NDE Vibration
Graph.
In the chart above for the smallest horizontal is 0.7
at time 08.00 and 09.00 and the largest is 0.9 at time
11.45 to 17.00 while the vertical is the same
magnitude is 0.9 for axial, the smallest is 0.7 at time
08.00 to 13.15 and the greatest is 0.8 at time 14.00 to
17.00.
Figure 9: Telescopic Spreader Motor Temperature.
In the chart above, the smallest DE is 36 at 09.00
and the largest is 43 at 17.00, while the smallest NDE
is 37 at 08.00 to 10.00 and the largest is 42 at 17.00.
4.4 Isolation Resistance
Measurement of insulation resistance of the
telescopic spreader hydraulic pump motor using a
device, a megger, by disconnecting all cable
connections at the terminals. Select the selector on the
megger according to the voltage of the motor object.
Then check the connection between phase and phase
of each phase, and finally check the connection
between phase and ground of each phase.
Table 4: Insulation Resistance in Telescopic Spreader
Motors Before and After Varnishing &; Heating.
Test
Point
U-
Ground
V-
Groun
d
W-
Ground
U-V
V-W
W-U
Information
Main
Stator
1300
MΩ
1300
MΩ
1200
MΩ
1000
M
1000
M
1000 M
Before
Main
Stator
2000 MΩ
2000
MΩ
2000 MΩ
2000
MΩ
2000
MΩ
2000 MΩ
After
The increase in the value of insulation resistance
on the telescopic spreader motor due to the
varnishing process is carried out after which the
heating process is carried out for 48 hours with a
temperature of 110
0
C.
0
0,5
1
Drive End (DE)
Horizontal Vertikal Axial
0
1
Non Drive End (NDE)
Horizontal Vertikal Axial
30
35
40
45
TEMPERATURE
DE
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
454
4.5 No-Load Motor Current and
Voltage Measurement
The second step in decreasing the performance of the
telescopic spreader pump motor is to test the motor so
that it can operate every hour.
Table 5: No-load Motor Voltage and Current Measurement
Results.
Time
Voltase
Ampere
R-S
S-T
R-T
R
S
T
09.00
381 V
380 V
380 V
8,1 A
8,2 A
8,2 A
11.00
381 V
381 V
381 V
8,3 A
8,3 A
8,1 A
14.00
382 V
381 V
380 V
8,4 A
8,3 A
8,2 A
16.00
381 V
381 V
381 V
8,3 A
8,3 A
8,2 A
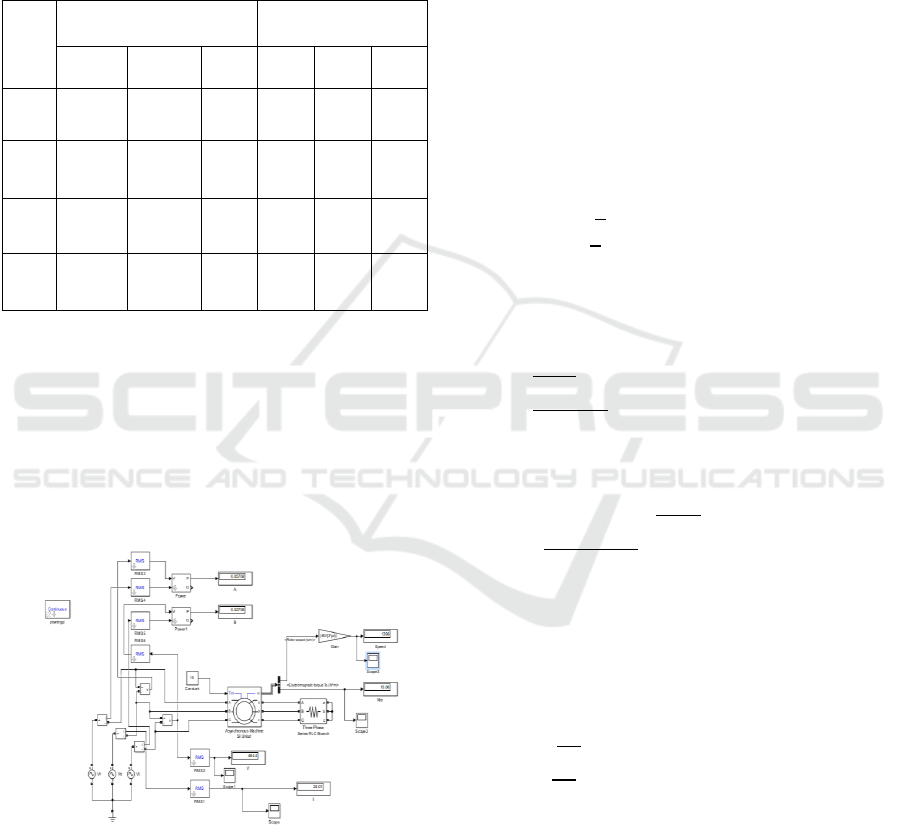
4.6 Hydraulic Motor Simulation Using
Simulink
Changes in load that occur during the operation of
Quayside Container Crane result in trips on the
hydraulic pump motor of the telescopic spreader. The
effect of the load change can be seen from the matlab
simulation as follows:
Figure 10: Hydraulic Motor Circuit.
In figure 10 the following components are used as
follows:
• Power Gui
• RMS (6)
• Power (2)
• Gain
• Display (6)
• Scope (4)
• Asynchonous Manchine
• Three-Phase series RLC Branch
• Constant
• Bus selector
• Ground
• Voltase Measurement (3)
• Current Measurement (3)
• Ac Voltase Source (3)
4.7 Calculation of 3 Phase Induction
Motor Efficiency
• Motor Efficiency Measurement Calculation
The calculation of the output power value is based
on Table 5 as follows:
P in Calculation :
P =
P =
(9)
P = 4.560 Watt
• Insulation resistance calculation formula with
3 phase motor performance
Slip i Calculation:
S =
S =
(10)
S = 3.6%
• Mechanical Loss Calculation:
P loses = T
=
=
= 151.24 rad/s (11)
P loses = 0.12 151.24
= 18.14 Watt
• Winding Loses :
P
Scl
= 3 . I
2
. R1
= 3 8.1
2
65.44 (12)
= 1.288 Watt
P
Rcl
=
P
Loses
nominal
=
62.94 (13)
= 13.217 Watt
• P
total loses
= P
m
+ P
Sc
l + P
Rcl
= 18.14 + 1.288 + 13.217 (14)
= 44.23 Watt
• P Out Calculation:
P
Out
= P
in
– P
loses
= 4.650 – 44.23 (15)
= 4.605 Watt
• Efficiency Calculation:
Analysis of Reduced Performance of 7.5 kW Hydraulic Pump Motor on Telescopic Spreader Quayside Container Crane (QCC)
455

Efficiency =
=
(16)
= 90%
• Formula between resistance and temperature
The calculation of resistance and temperature
based on tables 3 and 4 is as follows:
Find the resistance value in DE with a temperature
of 0
0
C First:
=
/ (1 + )
= / (1 + (0.0043 x 36)
= / (1 + 0.154) (17)
= / 1.154
= Ω
Find the resistance value in DE with a temperature
of 43
0
C First
=
(1 +
)
= x (1 + (0.0043 x 43)
Because
= x (1 + 0.184)
= x 1. 184
= Ω
• Find the resistance value in an NDE with a
temperature of 0
0
C First
=
/ (1 +
)
= / (1 + (0.0043 x 37)
= / (1 + 0.159)
= / 1, 159
= Ω
• Find the resistance value in an NDE with a
temperature of 42
0
C First
=
(1 +
)
= x (1 + (0.0043 x 42)
Because
= x (1 + 0.180)
= x 1,180
= Ω
• Insulation Resistance Formula
Calculation of Isolation Resistance based on table
5:
IR =
IR =
4.8 Research Analysis
The increase in temperature in the telescopic spreader
hydraulic pump motor can be seen from table 4 so that
this means that the motor insulation material will
inhibit the electric current more when the higher
temperature will cause the insulation of the stator
winding to be damaged. Based on table 5, changes in
insulation resistance have increased due to the
varnishing process and heating process with a
working temperature of 1100C for 48 hours. If the
temperature setting is too low, then the insulation
resistance can be reduced. If the temperature setting
is too hot, there is a risk of insulation becoming less
effective because it experiences thermal degradation
or can even melt.
Based on table 4, the performance of the telescopic
spreader hydraulic pump motor can be affected by
vibration enhancement. Over-vibration can cause
interference with the internal components of the motor
and cause faster wear. This can lead to a decrease in
motor efficiency and even complete failure.
So the factor that has a major influence on the
decrease in the performance of the telescopic spreader
hydraulic pump motor in this study is the decrease in
the insulation resistance value on the stator of the
spreader pump motor. The decrease in the insulation
resistance value of the spreader motor is caused by
the condition of the outside air which is quite dirty
and due to the leakage of hose hoses in the hydraulic
pump system that can penetrate the insulation of the
stator winding on the telescopic spreader motor.
5 CONCLUSION
The conclusions obtained from the study on the
analysis of the performance degradation of the 7.5
kW hydraulic pump motor on the Quayside Container
Crane telescopic spreader are as follows:
1. The results of the efficiency calculation in
chapter 4.5 of the telescopic spreader hydraulic
pump motor of 90% with different outputs of
4,605 Watts,
2. For simulated performance degradation analysis
of 7.5 kW hydraulic pump motor on Quayside
Container Crane telescopic spreader using
MATLAB R2016a,
3. The results of the data on isolation prisoners
obtained at PT. Parvi Indah Persada in table 5
(Before) in phase U - ground and phase V - ground
is the same at 1300 M, and W - ground is 1200 M,
while between phases U-V, V-W, W-V is the
same at 1000 M and Based on table 6 (After)
for solitary confinement in phases U, V, W-
Ground the isolation resistance is the same which
is 2000M there is also for isolation resistance
between phase U-V, V-W, W-U the solitary
confinement is the same i.e. 2000M. The
increase in insulation resistance value is quite
significant in the telescopic spreader hydraulic
pump motor because the Varnishing process is
carried out after which the Heating process is
carried out for 48 hours Advice.
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
456

5.1 Suggestion
The suggestions from this study are:
1. To make it easier to learn the analysis of
electrical machines, software should be used
that can present dynamic simulations.For
example matlab/simulink
2. Multiply references in research and analysis,
This study can be a reference to analyze the
efficiency of three-phase induction motors
with the compensated ampere ratio voltage
method.
REFERENCES
Andriyadi, A. (2020). Analysis of IDF K-84-002 CDU IV
Motor Isolation Resistance Reduction at PT. Pertamina
RU III Plaju (Doctoral dissertation, 021008 Universitas
Tridinanti Palembang).
Anthony, Z. (2020). Alternating Current Electric Machine:
Revised Edition. Andy Publishers.
Apriyadi, T. (2022). Insulation resistance testing on the
stator winding of a 500 kW induction motor. FTI.
EASA AR-100, Recommended Practice for The Repair of
Rotating Electrical Apparatus, St. Lois, MO: Electrical
Apparatus Service Association, inc., 2015
Kristanto, V. H. (2018). Research Methodology Guidelines
for Writing Scientific Papers: (KTI). Deepublish.
PT. Indonesia Power, Electric Motor Maintenance Manual
Level 1,2,3., Semarang: PT. Indonesia Power Unit
Generation Semarang, 2016.
Ramdhan, M. (2021). Research methods. Cipta Media
Nusantara.
Siyoto, S., &; Sodik, M. A. (2015). Basic research
methodology. media literacy publishing.
Sulastri, D., &; Darmawan, I. A. (2022). Electrical testing
of 3 phase induction motor rotor cage 75 kW at PT
MESINDO TEKNINESIA. TESLA: Journal of
Electrical Engineering, 24(1), 47-55.
Theodore Wildi. (2017). Three-Phase Induction Motor
Theory. Ministry of Education and Culture of the
Republic of Indonesia, 2(1), 7–37.
Wicaksana, A., &; Rachman, T. (2018). Angewandte
Chemie International Edition, 6(11), 951–952., 3(1),
10–27. https://medium.com/@arifwicaksanaa/
pengertian-use-case-a7e576e1b6bf 7
Rofii, A., &; Ferdinand, R. (2018). Analysis of the use of
capacitor banks in an effort to improve the power factor.
Journal of Electrical Engineering Studies, 3(1), 39–51.
Analysis of Reduced Performance of 7.5 kW Hydraulic Pump Motor on Telescopic Spreader Quayside Container Crane (QCC)
457
