
Vehicle and Parking Space Detection for Smart Parking Systems
Using the YOLOv5 Method
Aditya Eka Saputra
a
, Bernat Kristian S. Giawa
b
and Rajes Khana
c
Department of Electrical Engineering, Universitas 17 Agustus 1945 Jakarta, Jl. Sunter Permai Raya,
Sunter Agung, Tanjung Priok, Jakarta Utara, Indonesia
Informatics Department, Faculty of Engineering and Informatics, Universitas 17 Agustus 1945, Jakarta, Indonesia
,
Keywords: Vehicle Detection, Parking Lot, YOLOv5 Method, Parking Efficiency, Smart Parking System.
Abstract: The YOLOv5 network architecture has the advantage of fast and accurate object detection speed and has high
real-time object detection capabilities. This research utilizes the YOLOv5 (You Only Look Once version 5)
method to detect vehicles and parking spaces in a smart parking system. The main aim of this research is to
increase the efficiency of parking space use. The research involved collecting and processing image data from
a variety of different parking locations, which was used to train the YOLOv5 model. The proposed network
is trained and evaluated on the Parking Lot dataset. The results of the YOLOv5s_Ghost experiment with a car
vehicle detection confidence value of 93.0% and available space detection confidence of 94.0%. Using the
best weights from YOLOv5s_Ghost increases the mean Average Precision (mAP) value to 94.9%, slightly
above YOLOv5s which reaches 94.7%. The YOLOv5s_Ghost architecture shows a high level of accuracy in
vehicle and parking space detection, even in various lighting conditions from morning to evening in the smart
parking system. YOLOv5s_Ghost uses the GhostNet module, can be transferred to other classic models with
comparable performance while reducing the number of parameters, optimizing computing resources, and
increasing mAP and reducing loss.
1 INTRODUCTION
In this modern era, with population growth and an
increase in the number of cars, the number of parking
spaces is also increasing in all big cities in the world.
In most parking locations, ground sensors are used to
monitor the condition of the various parking spaces.
Traditional methods for detecting parking spaces
involve ultrasonic technology (Shao et al., 2018),
geomagnetics (Zhou & Li, 2014), and infrared ray (H.
C. Chen et al., 2017; Li & Lin, 2019). This requires
the installation and maintenance of sensors in each
parking area, especially in parking lots with a large
number of spaces, which may result in high costs.
Although this method can produce a higher level of
accuracy, it is relatively expensive.
To overcome these challenges, intelligent parking
space detection technology has emerged as an
innovative solution. One of the methods proposed in
a
https://orcid.org/0009-0009-2430-9030
b
https://orcid.org/0009-0001-5897-4102
c
https://orcid.org/0000-0001-6062-6492
this paper uses deep learning-based object
recognition technology, specifically the You Only
Look Once (YOLO) model version 5. This model is
very efficient in detecting objects in images and
videos in real-time.
This research focuses on implementing the
YOLOv5 method for detecting available parking
spaces and cars in the parking area. Using this
technology, it can accurately identify empty parking
spaces and parked vehicles, providing real-time
information to parking users. This research seeks to
increase the efficiency of parking space use and
reduce losses due to time wasted looking for a
suitable parking space.
2 RELATED WORK
Object detection is a technique in image or video
458
Saputra, A., Giawa, B. and Khana, R.
Vehicle and Parking Space Detection for Smart Parking Systems Using the YOLOv5 Method.
DOI: 10.5220/0012584700003821
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 4th International Seminar and Call for Paper (ISCP UTA ’45 JAKARTA 2023), pages 458-466
ISBN: 978-989-758-691-0; ISSN: 2828-853X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

processing that allows the recognition and
determination of the location of objects in an image
or video. Essentially, the concept of object detection
involves scanning the entire image area to identify
parts that contain objects and parts that are the
background (Salim, 2020).
In recent years, deep learning-based object
detection methods have become increasingly
significant. K.Simonyan and A.Zisserman (Chung et
al., 2018) developed a very deep CNN convolutional
network, known as VGG, for object classification.
Research shows that VGG models can generalize well
across a wide range of tasks and datasets, matching or
outperforming more complex recognition pipelines
built on less deep image representations. These
results emphasize the importance of depth in visual
representation.
RCNN (Girshick et al., 2014) (Region Proposal-
Convolutional Neural Network) is an object detection
method that combines Region Proposal with
Convolutional Networks. This is the first time that
deep learning has been used in a conventional object
detection task. The best performing systems are
complex ensembles that combine multiple low-level
image features with high-level context from object
detectors and scene classifiers. This research presents
a simple and scalable object detection algorithm that
provides a relative improvement of 30% compared to
the previous best results in PASCAL VOC 2012. This
research achieves performance through two insights.
The first is to apply a high-capacity convolutional
neural network to bottom-up region proposals to
localize and segment objects. The second is a
paradigm for training large CNNs when labeled
training data is scarce. This research shows that it is
very effective to first train a network with supervision
for an additional task with a lot of data (image
classification) and then fine-tune the network for a
target task where data is scarce (detection). It then
conjectured that the “supervised pre-
training/domain-specific refinement” paradigm
would be highly effective for a variety of data-
deficient vision problems.
S. Ren et al (Ren et al., 2017) introduced a faster
R- CNN, which is more efficient compared to RCNN.
Faster R-CNN eliminates the selective search step of
RCNN by introducing RPN networks. RPN allows
region proposal, classification, and regression to
share common convolutional features, thus speeding
up the detection process. Nevertheless, Faster R-
CNN still involves two stages: first, determining the
presence of targets within the frame area, then
identifying those targets. This research has presented
RPN for making efficient and accurate regional
proposals. By sharing convolutional features with
downstream detection networks, the region proposal
step is almost cost-free. This method allows a unified
deep learning-based object detection system to run at
5-17 fps. The learned RPN also improves the quality
of region proposals and overall object detection
accuracy.
YOLO (Redmon et al., 2016) combines object
discrimination and object recognition into one step,
which improves the detection speed. YOLOv5 (You
Only Look Once version 5) is a real-time object
recognition algorithm based on deep learning. The
YOLOv5 algorithm has advantages in terms of speed
and accuracy in object detection. YOLOv5 hasfast
performance in detecting objects. This means it is
capable of real-time detection, even on devices with
limited resources. Even though it is fast, YOLOv5
also maintains a good level of accuracy in detecting
objects (Iskandar Mulyana & Rofik, 2022).
In managing parking lots, identifying whether a
parking space is empty or not is an additional
challenge besides detecting vehicles. A number of
studies have been carried out to overcome this
problem. M.Ahrnbom et al. (Ahrnbom et al., 2016)
took features such as color and gradient size in LUV
space, then trained an SVM-based classifier to
classify the status of parking lots, whether they are
empty or occupied. Giuseppe Amato et al. (Amato et
al., 2016) used a CNN (convolutional neural network)
to train a detector capable of detecting parking lots
and their status based on LBP features. Tom Thomas
et al. (Thomas & Bhatt, 2018) developed a binary
classifier convolutional neural network to determine
whether a parking space is occupied or not.
Meanwhile, Cheng-Fang Peng (Peng et al., 2018)
takes three new features from each parking space,
namely vehicle color characteristics, local gray scale
variation features, and corner features, to assess
occupancy status. They trained a deep neural network
to determine the occupancy status of each parking
space based on these three features. Another system
(Amato et al., 2016) periodically captures images of
several parking lots, and for each parking lot, the
occupancy status is determined using a pre-trained
CNN. However, in this method, the image captured
by the camera must be filtered through a mask that
identifies different parking spots. However, making
these masks must be done manually by humans,
which means it is necessary to make manual masks
for each parking space at different parking locations.
Vehicle and Parking Space Detection for Smart Parking Systems Using the YOLOv5 Method
459

3 MODEL METHOD
3.1 YOLO v5 Algorithm
The YOLO object detection algorithm is a one- stage
object detection algorithm first proposed by Redmon
J. This algorithm eliminates the candidate box
extraction step present in the two- stage algorithm,
and combines bounding boxes and classification into
a single regression problem. The process of the
YOLO algorithm is as follows: first, the image is
divided into an S×S grid. Each grid is responsible for
predicting the presence of targets and determining
where the actual center point is within the grid. From
each of these grids, several bounding boxes S × S × B
are generated. Each bounding box has five
parameters: the coordinates of the target center point,
the dimensions of the width and height of the target
(x, y, w, h), and the confidence whether the target is
there or not. Each S × S grid also predicts the
probability of the possible target categories within it.
The confidence of the predicted bounding boxes and
the category probabilities are then multiplied to
obtain a category score for each predicted box. These
prediction boxes are then filtered using the non-
maximum suppression (NMS) method to obtain the
final prediction results. The YOLO series algorithm
has experienced rapid development in recent years. In
2020, two versions of YOLO appeared successively,
namely YOLO v4 and YOLO v5. YOLO v5
successfully achieves a precision accuracy of nearly
50 mAP in the COCO dataset (Lin et al., n.d.) while
maintaining operating speed. In the context of vehicle
detection in a highway monitoring environment, this
chapter selects a small version of YOLO v5 as the
reference network model, with the aim of improving
the accuracy of the detection algorithm.
YOLO v5 is the most advanced version of the
YOLO object detection algorithm. Based on the
YOLO v3 and YOLO v4 algorithms, there is
innovation in set arithmetic to increase detection
speed. YOLO v5 adopts the anchor box concept to
improve the efficiency of the R-CNN algorithm, and
the manual selection approach of anchor boxes is
abandoned. K-means clustering is carried out on the
bounding box dimensions to obtain more optimal
prior values. In 2020, Glenn Jocher introduced YOLO
v5. This network structure consists of input,
backbone, neck, and prediction, as seen in Figure 1.
1) The input is the vehicle image input link, which is
divided into three parts: Data enhancement (De,
n.d.), image size processing (Shorten
& Khoshgoftaar, 2019), and anchor frame auto-
Figure 1: YOLO v5 network structure.
matic adaptation (Devkota et al., 2022). In
traditional YOLO v5, mosaic data enhancement
technique is used to combine inputs by randomly
zooming, cropping, arranging and merging
images, with the aim of improving small target
detection capabilities. When training a dataset, the
size of the input images is adjusted to a uniform
size and then fed into the model for analysis. The
initial size of the dataset is set to 460 × 460 × 30.
The initial anchor frames for YOLO v5 are (116,
90, 156, 198, 373, 326).
2) The backbone network consists of two structures,
namely the Focus structure (Yang et al., 2018) and
the CSP structure (Guo et al., 2022). The Focus
structure is tasked with cropping the image before
it enters the main part of the network. As shown
in Figure 10, the original image with size 608 ×
608 × 3 is divided into small chunks. With this, a
feature map of size 304 × 304 × 12 is generated,
and then through a convolution operation with
kernel 32, a new feature map is formed. The Focus
operation can reduce the dimensions of the input
sample without using additional parameters,
making it possible to retain as much information
as possible from the original image. The CSP
structure, on the other hand, imposes transitions
on the input features by using two 1*1
convolutions. This approach helps improve the
learning capabilities of CNNs (Y. Chen & Yuan,
2020), overcome computational bottlenecks, and
reduce the required memory load.
3) The Neck is a network layer that integrates image
features and passes them to the prediction layer.
In YOLO v5, the Neck uses the FPN+PAN
structure. FPN takes high-level feature
information and combines it from top to bottom to
form a feature map that is used in the prediction
process. Meanwhile, PAN is a basic pyramid that
transmits position characteristics strongly from
bottom to top (Dong &
Xing, 2018). Thus, this structure allows efficient
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
460
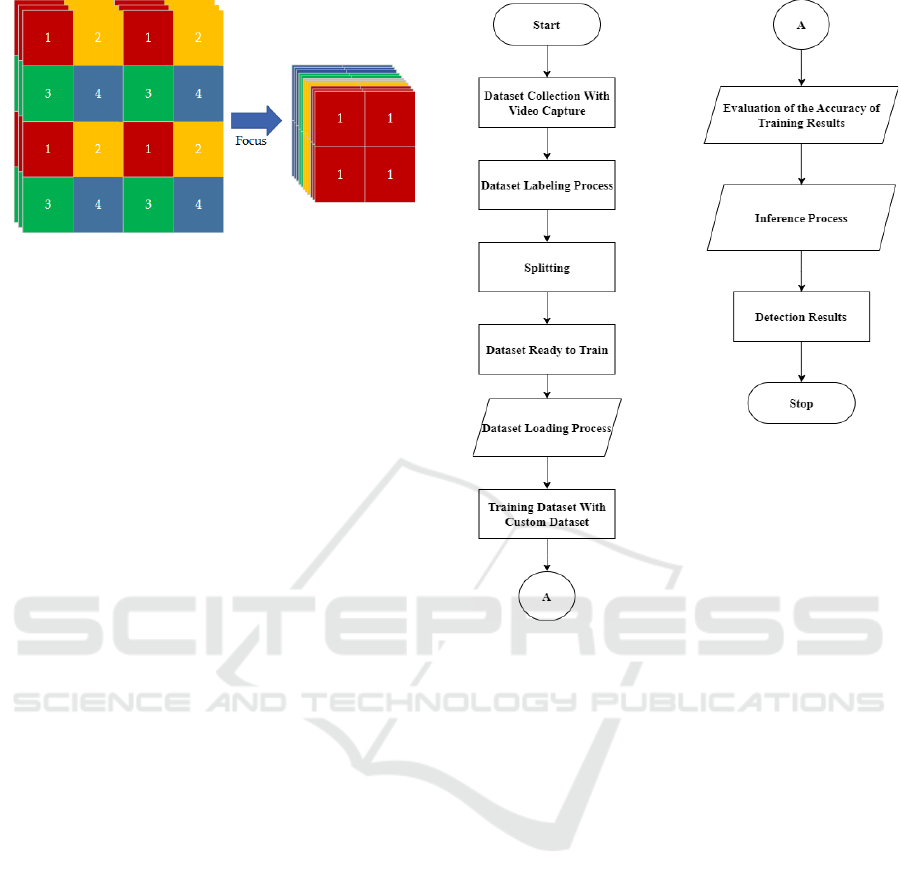
Figure 2: Processing flow of Focus module.
communication and integration of feature
information in order to prepare predictions.
4) The prediction layer is tasked with processing
image features and generating bounding boxes to
predict categories. In YOLO v5, GIOU_Loss is
used as the loss function to determine the box
boundaries. In overlapping object detection
situations, GIOU_NMS is more efficient
compared with traditional non- maximum
suppression (NMS) methods.
3.2 Research Flowchart
Researchers used Google Colab to implement
YOLOV5, which is the latest development of the
YOLO network designed to detect objects in images
(Tan et al., 2021). In essence, the aim of object
detection is to identify the location of objects in the
image and classify their type. In other words, the
process involves using images as input, followed by
creating bounding box vectors and predicting object
classes in the output (Wei et al., 2020).
Figure 3 explains the flow of the research stages
as follows:
a. Dataset Collection
In this research, researchers used a custom dataset
that was collected personally. Dataset collection is the
process of collecting images in the form of pictures or
images obtained from video recordings taken in
UTA’45 Jakarta car parks. The video recording
results were then extracted using Roboflow software.
b. Dataset Labeling Process
The labeling process is the stage where all images in
the dataset are labeled so they can contain the image
name. Labeling is done by creating a bounding box
for the object you want to mark in the image. Make
sure the bounding box surrounds the object correctly
Figure 3: Research Flowchart.
and precisely so that it covers all the objects in
question. After adding a bounding box to the object,
add a class name or label that corresponds to the
marked object. These could be labels like “car” and
“space available.” After adding the bounding box and
giving the object a class name, make sure to save the
annotation or label. Roboflow will store information
about the locations, object types, and labels that you
have added to the dataset. After labeling the entire
dataset, make sure to save the labeled dataset with
appropriate annotations.
c. Splitting
The Data Splitting process is the process of dividing
a dataset into different subsets for use in certain stages
in machine learning or model evaluation. This
division is generally carried out for the purposes of
testing, validation and model training. A common
split is 70-80% for training datasets, 10-15% for
validation, and 10-15% for test, but these proportions
can vary depending on the size of the dataset and
project needs. The dataset used in this research has a
total of 650 images. To be adaptive to the training
process, this work reduces the image size to 640 × 640
Vehicle and Parking Space Detection for Smart Parking Systems Using the YOLOv5 Method
461
pixels and converts the standard dataset format to
YOLOv5 format. Based on the 650 image dataset, it
is divided into 3 parts, namely Train, Val and Test.
The distribution of the dataset can be seen in the table
1 below:
Table 1: Dataset Splitting.
Distribution
Percentage
Total Image
Train
70%
454 images
Val
20%
132 images
Test
10%
64 images
d. Dataset Ready to Train
A dataset that is ready for training is a collection of
images data that has gone through a previous process
where each image has been given an annotation or
label that explains what objects are in it. This
annotation usually takes the form of a bounding box
that marks the location of the object, as well as a class
or label that identifies the type of object.
This dataset has been prepared to be used on
computing platforms such as Google Colab, which is
a development environment that can be accessed
online. Apart from that, this dataset will be utilized by
applying the YOLOV5 method. YOLOV5 is an
approach or technique in developing object detection
models that makes it possible to detect objects
quickly and accurately in images.
e. Dataset Loading Process
The dataset input stage is the step where the collection
of available car and space datasets that have gone
through the roboflow process are uploaded to Google
Colab. This process has great importance because the
quality of the dataset must be prepared as best as
possible to ensure object detection has stability and a
high level of accuracy. The dataset used is a
collection of images of cars and available spaces in
parking lots which have been annotated with labels
on each image.
f. Training Dataset with Custom Dataset
After the dataset created for training is fulfilled. The
next step is to train the data using the Google Colab
system. In YOLOv5 training involves cloning data
from the YOLOv5 ultralytic GitHub repository and
using the YOLOv5s and YOLOv5s_Ghost models.
YOLOv5 is characterized by 213 layers containing a
total of 7,225,885 parameters. Batch size can be
adjusted to a range of 16, 24, and 40, and training can
last for 100, 300, or 500 epochs. The YOLOv5
algorithm uses technologies known as IOU
(Intersection Over Union) and Non-max Suppression.
This technology is used to measure the ratio between
the bounding boxes of predicted objects and the base
annotation, where IOU > 0.5-0.9 is considered
acceptable. In this context, if the object's confidence
value is more than 0.5, a bounding box will be
assigned to the object. However, if the object's
confidence value is less than 0.5, the object is
considered as background or an area that has no
detected objects.
We use a dataset of cars and available spaces in
parking lots that we have created ourselves using
roboflow to pre-train the network, we use this dataset
to fine-tune the network to detect vehicles and
available spaces in parking locations. The network
parameters are refined by using the training set
images in the collection on the smart parking dataset,
so that the detection effect of the entire network is
optimized. Several experimental parameters were set
as shown in Table 2.
Table 2: Description of network parameters.
Parameter Name
Parameter Value
Learning Rate
0.005
Epoch
2000
Batch Size
16
Img Size
640
Momentum
0.937
Weight Decay
0.0005
g. Evaluation of the Accuracy of Training Results
The accuracy evaluation process is a step to assess the
level of accuracy of model training on the dataset.
This stage has an important role in object detection
because detection stability requires a high level of
accuracy. Therefore, assessing the accuracy value in
object detection is very important to make object
detection more stable in its accuracy value in images
or videos. Several metrics have been used to assess
the performance of deep learning detection models.
Precision (P) is the proportion of True Positives
among all detected Positives (Padilla Carrasco et al.,
2023):
𝑇𝑟𝑢𝑒 𝑃𝑜𝑠𝑖𝑡𝑖𝑣𝑒 (𝑇𝑃)
𝑃𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 =
𝑇𝑟𝑢𝑒 𝑃𝑜𝑠𝑖𝑡𝑖𝑣𝑒 (𝑇𝑃) + 𝐹𝑎𝑙𝑠𝑒 𝑃𝑜𝑠𝑖𝑡𝑖𝑣𝑒 (𝐹𝑃)
True Positive (TP) is a result obtained from a machine
prediction which states that this is the correct answer
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
462

(true). Meanwhile, False Positive (FP) is the result of
an answer obtained from a machine prediction which
states it is correct but is a wrong answer. Recall is a
matrix used to measure how good the model that has
been created is. The Recall matrix equation can be
written as follows:
𝑇𝑟𝑢𝑒 𝑃𝑜𝑠𝑖𝑡𝑖𝑣𝑒 (𝑇𝑃)
𝑅𝑒𝑐𝑎𝑙𝑙 =
𝑇𝑟𝑢𝑒 𝑃𝑜𝑠𝑖𝑡𝑖𝑣𝑒 (𝑇𝑃) + 𝐹𝑎𝑙𝑠𝑒 𝑁𝑒𝑔𝑎𝑡𝑖𝑣𝑒 (𝐹𝑁)
False Negatives (FN) describes the number of
positive objects that are present in the dataset, but the
model incorrectly detects them as negatives or fails to
recognize them. The recall matrix is a marker of how
well the model performs when the data categories are
imbalanced. Therefore, in calculating False
Negatives (FN) for recalls, FN is part of the
denominator used to calculate the proportion of
positive objects that failed to be detected by the
model. In other words, False Negatives reflect model
errors in identifying existing positive objects. This is
a common standard practice in object detection
applications (Redmon et al., 2016).
In this context, mAP.5 and mAP.95 reflect the
average Average Precision of all detections with an
Intersect of Union (IoU) of 50% and 95%,
respectively. IoU is the result of the intersection of
two bounding boxes, namely those detected by the
model and the ground truth, which are then
normalized by the combination of the two. Average
precision (AP) is calculated for each class-specific
detection with an IoU greater than 50% or 95%.
Finally, Average Average Precision (mAP) is
calculated using the average of all classes.
Additionally, in the validation process, different
types of errors related to bounding boxes (Box),
(Obj), and (Cls) are calculated, as seen in Table 2.
Box Error is measured using the Index of Similarity
(IoU), which is the result of from the intersection of
model predictions and ground truth, which is then
normalized by the combined area of both. Obj error
refers to the objectivity score, which is used to
estimate the probability that a bounding box is an
actual object. Meanwhile, the Cls error is related to
the multi- classification score. Obj and Cls error
calculations use the Focal Loss function, which is an
extension of the cross-entropy loss function. Focal
Loss is used to reduce the impact of easy examples
and redirect training to more difficult negative cases.
There are also other metrics that assess model
efficiency, such as inference speed which is often
measured in frames per second (FPS), and the number
of parameters which generally indicate good model
complexity.
h. Inference Process
The next step in entering images or videos is the
process where the images or videos that will be tested
for object detection are entered into the Google Colab
system. The images used in this step involve various
cars and available spaces in the parking lot and videos
taken in the parking lot environment.
i. Detection Results
The detection results stage is the result of applying
object detection to an image or video using the
YOLOV5 method. These results show the car objects
and available space that were successfully detected in
the image or video, along with the detection accuracy
value.
4 EXPERIMENT RESULTS
YOLOv5 is the latest version of the superior YOLO
object detection algorithm with high detection
capability, fast accuracy and good real- time
performance. YOLOv5 presents five different
models, namely YOLOv5n, YOLOv5s, YOLOv5m,
YOLOv5l, and YOLOv5x, where YOLOv5s has the
smallest model size (Tian & Liao, 2021). This
research uses 2 YOLOv5 architectures, namely
YOLOv5s and YOLOv5s_Ghost. The comparison
results of car object detection and available space of
both models (YOLOv5s model and YOLOv5s_Ghost
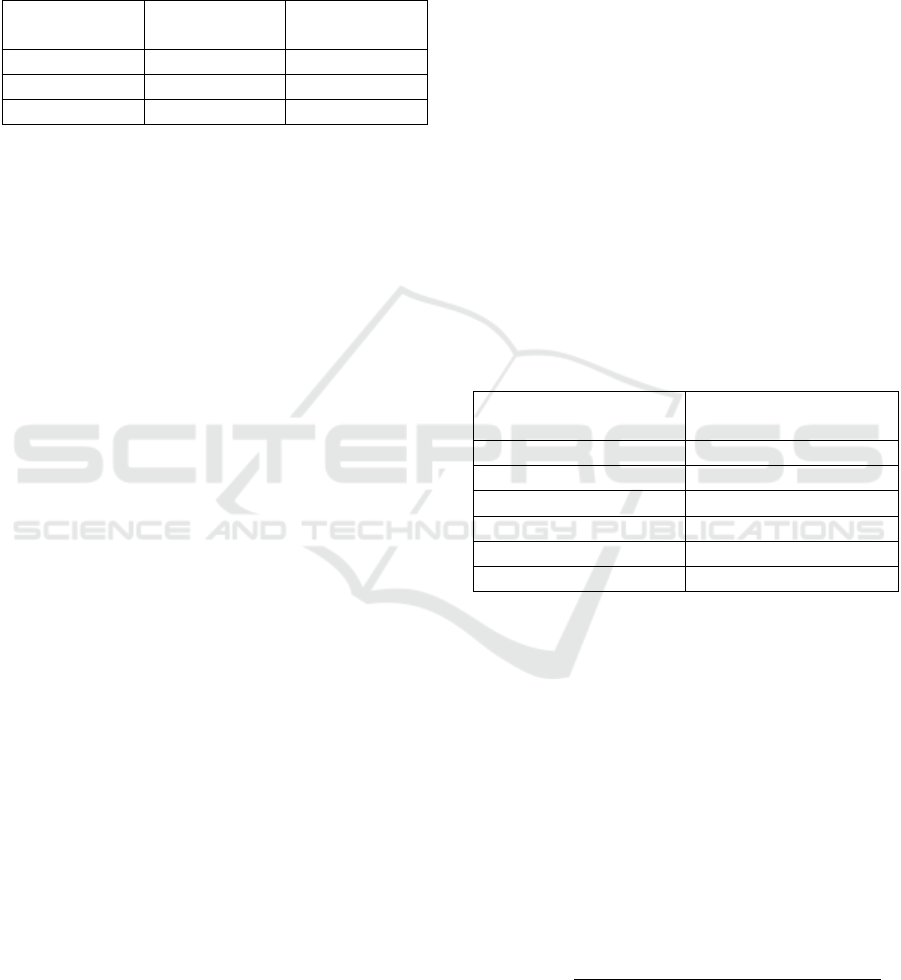
model) are shown in Table 3 and Figure 4. In addition,
this table shows the Precision, Recall, F-1 score, and
mAP of the YOLOv5s and YOLOv5s_Ghost
architectural models. We compare based on the value
of the best 2000 epoch results. To evaluate the model
performance objectively, the mAP (Mean average
precision) values were compared. The mAP value of
the YOLOv5s model is 94.7%, and that of
YOLOv5s_Ghost is 94.9%. Overall, it can be seen
that the YOLOv5s_Ghost model has advantages over
the YOLOv5s model.
Table 3: Comparison table of best performance by models.
Model
Precision
Recall
F-1
Score
mAP
(0.5)
YOLOv5s
98.3
96.0
93.0
94.7
YOLOv5s-
Ghost
98.9
96.0
93.0
94.9
Vehicle and Parking Space Detection for Smart Parking Systems Using the YOLOv5 Method
463
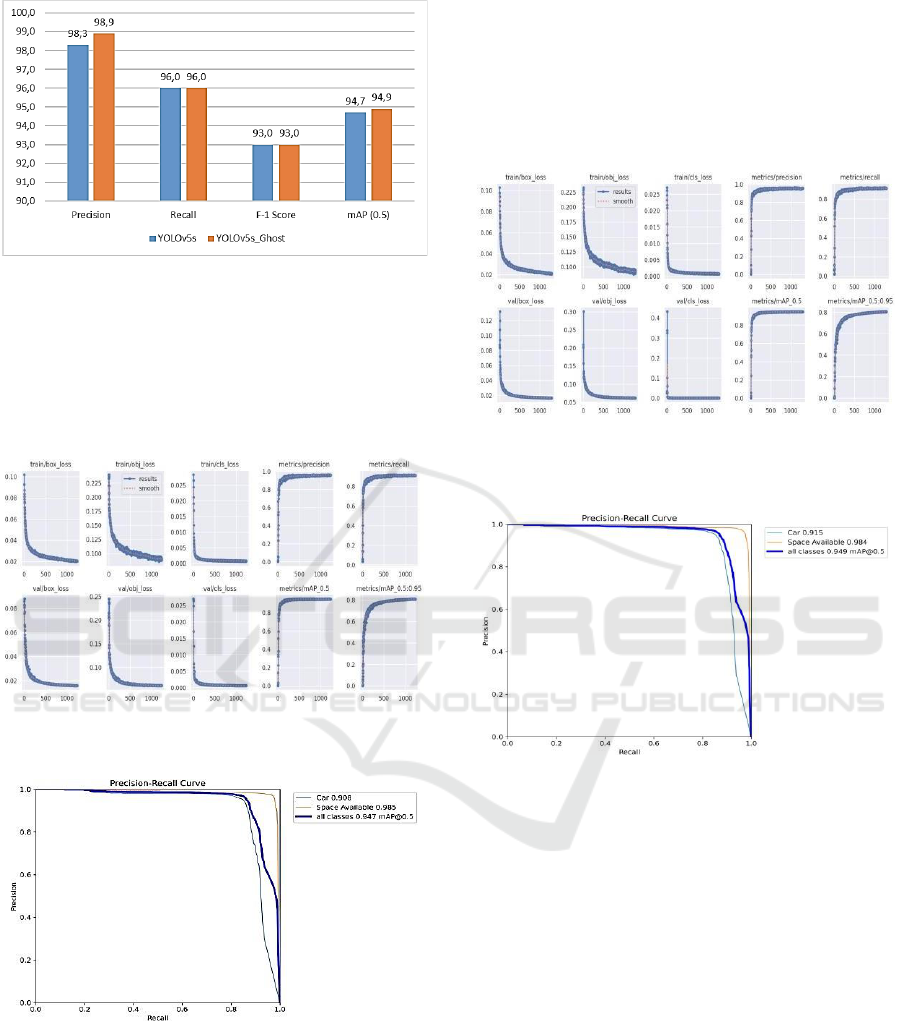
Figure 4: Comparison graph of result values for Original
YOLOv5s and YOLOv5s_Ghost model.
Part of Figure 5 shows a graph of the metrics curve as
training progresses. After evaluation, the YOLOv5s
model has a validation precision score of 98.3%, a
recall score of 96.0%, an F1 score of 93.0%, and a
mAP score of 94.7%.
Figure 5: Graph of result values changes in key indicators
according to the epochs of training for YOLOv5s model.
Figure 6: Graph of result values Precision–Recall curve for
YOLOv5s model.
As a result of the training and validation process, we
found that the YOLOv5s_Ghost model was the best.
Thus, the final prediction is made based on the
weights obtained from the trained YOLOv5s_Ghost
model, which is considered to have the best
performance. Part of Figure 7 shows a graph of the
metrics curve as training progresses. After evaluation,
the YOLOv5s_Ghost model has a validation
precision score of 98.9%, a recall score of 96.0%, an
F1 score of 93.0%, and an mAP score of 94.9%.
These results confirm the effectiveness of our
approach in correctly predicting experiments
conducted in multiple environments.
Figure 7: Graph of result values changes in key indicators
according to the epochs of training for YOLOv5s_Ghost
model.
Figure 8: Graph of result values Precision–Recall curve for
YOLOv5s_Ghost model.
The Precision–Recall curve is a method of
evaluating the performance of an object detector due
to changes in the confidence level threshold value.
The confidence level is a value that tells the user how
confident the algorithm is about the detection. In
other words, the closer the number is to 1, the more
confident the model is in detecting the target object.
Part of Figure 8 is a graph of the Precision–Recall
curve of the YOLOv5s_Ghost model. It can be seen
that the space available value is 98.4% which is quite
high.
The object detection results of the
YOLOv5s_Ghost model can be seen in Table 4.
Among the detected objects, available space with a
confidence of 94.0%. Available space detection is
calculated as 96.6% for Precision, 97.0% for Recall,
96.8% for F1-Score, and finally 98.4% for mAP. This
means that the available space detection rate is quite
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
464

high. Meanwhile, the car detection value has a
confidence of 93.0%. Car detection is calculated as
95.0% for Precision, 85.2% for Recall, 89.8% for F1-
Score, and finally 91.5% for mAP value.
(a)
(b)
(c)
Figure 9: (a,b and c) Detection results of car and space
available using YOLOv5s_Ghost model.
Table 4: Key indicators of YOLOv5s_Ghost model.
Parameter
Car
Space
Available
Total
Precision / %
95.0
96.6
95.8
Recall / %
85.2
97.0
91.1
F1-Score / %
89.8
96.8
93.3
mAP (0.5) / %
91.5
98.4
94.9
5 CONCLUSIONS
This paper proposes a car and parking space detection
method based on the YOLOv5 algorithm. In this
research, we successfully detected car and available
space using two models and carried out a comparison
between the YOLOv5s and YOLOv5s_Ghost
models, and through training, the model was selected
for the YOLOv5s_Ghost model with good
performance. Then the best weights obtained through
validation are applied to the YOLOv5s_Ghost model
and tested. As a result, we find that the mAP has
increased to 94.9% compared to the YOLOv5s model
with an mAP value of 94.7% and the difference in the
increase of the YOLOv5s_Ghost model is slight. In
the car and available space detection test, the highest
confidence value was obtained, namely the car was
93.0% and the available space confidence value was
94.0%. In YOLOv5s_Ghost there is a GhostNet
module, which is a plug-and-play module that is easy
to transfer to other classic models while maintaining
comparable performance. Adding the GhostNet
module by reducing the number of parameters in the
model, so it requires less computing resources and
adding only the head is enough for the detection task
on the embedding device to produce higher mAp and
lower loss. If there is enough memory to embed the
device, it is still necessary to consider accuracy and
parameters. However, during the test there were
several cars and the available space was not detected
because the dataset used in this research was 650
images. The author suggests increasing the dataset
size and variation, as well as conducting more
experiments at the training stage in order to achieve
more optimal model results and a higher level of
accuracy. Furthermore, the authors suggest using the
YOLOv8 model architecture for further research.
REFERENCES
Ahrnbom, M., Astrom, K., & Nilsson, M. (2016). Fast
Classification of Empty and Occupied Parking Spaces
Using Integral Channel Features. IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition Workshops, 1609–1615. https://doi.org/
10.1109/CVPRW.2016.200
Amato, G., Carrara, F., Falchi, F., Gennaro, C., & Vairo, C.
(2016). Car parking occupancy detection using smart
camera networks and Deep Learning. Proceedings -
IEEE Symposium on Computers and Communications,
2016- Augus (Dl), 1212–1217.
https://doi.org/10.1109/ISCC.2016.7543901
Chen, H. C., Huang, C. J., & Lu, K. H. (2017). Design of a
non-processor OBU device for parking system based on
Vehicle and Parking Space Detection for Smart Parking Systems Using the YOLOv5 Method
465

infrared communication. 2017 IEEE International
Conference on Consumer Electronics - Taiwan, ICCE-
TW 2017, 297–298. https://doi.org/10.1109/ICCE-
China.2017.7991113
Chen, Y., & Yuan, L. (2020). Dynamic Convolution :
Attention over Convolution Kernels. 11027– 11036.
https://doi.org/10.1109/CVPR42600.2020.0110 4
Chung, C., Patel, S., Lee, R., Fu, L., Reilly, S., Ho, T.,
Lionetti, J., George, M. D., & Taylor, P. (2018).
Published as a conference paper at ICLR 2015 Very
Deep Convolutional Networks For Large-Scale Image
Recognition
Karen. American Journal of Health-System Pharmacy,
75(6), 398–406.
De, E. (n.d.). Deep-Learning-Based Image Reconstruction
and Enhancement in Optical Microscopy. 1–21.
https://doi.org/10.1109/JPROC.2019.2949575
Devkota, P., Manda, P., Devkota, P., Mohanty, S. D., &
Manda, P. (2022). Deep learning architectures for
recognizing ontology concepts from scienti c literature
Deep learning architectures for recognizing ontology
concepts from scientific literature.
Dong, N., & Xing, E. P. (2018). Few-Shot Semantic
Segmentation with Prototype Learning. 1–13.
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. Proceedings of the IEEE
Computer Society Conference on Computer Vision and
Pattern Recognition, 580–587. https://doi.org/
10.1109/CVPR.2014.81
Guo, Y., Zeng, Y., Gao, F., Qiu, Y. I., Zhou, X., Zhong, L.,
& Zhan, C. (2022). Improved YOLOV4-CSP
Algorithm for Detection of Bamboo Surface Sliver
Defects With Extreme Aspect Ratio. IEEE Access, 10,
29810–29820. https://doi.org/10.1109/ACCESS.202
2.3152552
Iskandar Mulyana, D., & Rofik, M. A. (2022).
Implementasi Deteksi Real Time Klasifikasi Jenis
Kendaraan Di Indonesia Menggunakan Metode
YOLOV5. Jurnal Pendidikan Tambusai, 6(3), 13971–
13982. https://doi.org/10.31004/jptam.v6i3.4825
Li, Y., & Lin, G. (2019). Design of intelligent parking lot
based on Arduino. IOP Conference Series: Materials
Science and Engineering, 490(4), 3596–3601.
https://doi.org/10.1088/1757-899X/490/4/042010
Lin, T., Zitnick, C. L., & Doll, P. (n.d.). Microsoft COCO :
Common Objects in Context. 1–15.
Padilla Carrasco, D., Rashwan, H. A., Garcia, M. A., &
Puig, D. (2023). T-YOLO: Tiny Vehicle Detection
Based on YOLO and Multi-Scale Convolutional Neural
Networks. IEEE Access, 11(March), 22430–22440.
https://doi.org/10.1109/ACCESS.2021.3137638
Peng, C. F., Hsieh, J. W., Leu, S. W., & Chuang, C. H.
(2018). Drone-based vacant parking space detection.
Proceedings-32
nd
IEEE International Conference on
Advanced Information Networking and Applications
Workshops, WAINA 2018, 2018-Janua, 618–622.
https://doi.org/10.1109/WAINA.2018.00155
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You only look once: Unified, real-time object detection.
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2016-
Decem, 779–788. https://doi.org/
10.1109/CVPR.2016.91
Ren, S., He, K., Girshick, R., & Sun, J. (2017). Faster R-
CNN: Towards Real-Time Object Detection with
Region Proposal Networks. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 39(6),
1137–1149. https://doi.org/10.1109/TPAMI.2016.25
77031
Salim, A. (2020). Object Detection (Case: Plat Detection).
https://medium.com/bisa-ai/object-detection-case-plat-
detection-7cb5f53682ae
Shao, Y., Chen, P., & Cao, T. (2018). A grid projection
method based on ultrasonic sensor for parking space
detection. International Geoscience and Remote
Sensing Symposium (IGARSS), 2018-July, 3378–3381.
https://doi.org/10.1109/IGARSS.2018.8519022
Shorten, C., & Khoshgoftaar, T. M. (2019). A survey
on Image Data Augmentation for Deep Learning.
Journal of Big Data. https://doi.org/10.1186/s40537-
019-0197-0 Tan, S., Lu, G., Jiang, Z., & Huang, L.
(2021).
Improved YOLOv5 network model and application in
safety helmet detection. ISR 2021 - 2021 IEEE
International Conference on Intelligence and Safety for
Robotics, 330–333. https://doi.org/10.1109/
ISR50024.2021.941956 1
Thomas, T., & Bhatt, T. (2018). Smart Car Parking System
Using Convolutional Neural Network. Proceedings of
the International Conference on Inventive Research in
Computing Applications, ICIRCA 2018, Icirca, 172–
174. https://doi.org/10.11 09/ICIRCA.2018.8597227
Tian, M., & Liao, Z. (2021). Research on Flower Image
Classification Method Based on YOLOv5. Journal of
Physics: Conference Series, 2024(1), 012022.
https://doi.org/10.1088/1742- 6596/2024/1/012022
Wei, R., He, N., & Lu, K. (2020). YOLO-mini-tiger: Amur
tiger detection. ICMR 2020 - Proceedings of the 2020
International Conference on Multimedia Retrieval,
517–524. https://doi.org/10.1145/33722 78.3390710
Yang, S. J., Berndl, M., Ando, D. M., Barch, M.,
Narayanaswamy, A., Christiansen, E., Hoyer, S., Roat,
C., Hung, J., Rueden, C. T., Shankar, A., Finkbeiner, S.,
& Nelson, P. (2018). Assessing microscope image focus
quality with deep learning. 1–9.
Zhou, F., & Li, Q. (2014). Parking guidance system based
on zigbee and geomagnetic sensor technology.
Proceedings - 13th International Symposium on
Distributed Computing and Applications to Business,
Engineering and Science, DCABES 2014, 268–271.
https://doi.org/10.1109/DCABES.2014.58
ISCP UTA ’45 JAKARTA 2023 - THE INTERNATIONAL SEMINAR AND CALL FOR PAPER (ISCP) UTA ’45 JAKARTA
466
