
Implementing an Efficient Speed Bump Detection System using
Adaptive Threshold Gaussian over Support Vector Machine for
Improved Detection
R. Priyanka
*
and W. Deva Priya
†
Department of Electronics and Communication Engineering, Saveetha School of Engineering,
Saveetha Institute of Medical and Technical Sciences, Saveetha University, Chennai, Tamil Nadu, 602105, India
Keywords: Adaptive Threshold, Support Vector Machine, Gaussian Thresholding, Intelligent Vehicle System, Roads,
Novel Speed Bump Detection.
Abstract: This research endeavours to identify speed bumps from provided images using Adaptive Thresholding for
enhanced detection. A total of 120 samples were divided equally into two groups. The first group, comprising
60 samples, underwent testing using the Support Vector Machine, while the second group was tested with the
Adaptive Threshold-Gaussian. Each group underwent 10 iterations. The dataset, comprising 6000 images
sourced from Kaggle.com, allocated 4800 images for training and the remaining for testing. With a G power
roughly at 80%, the Gaussian Adaptive Threshold yielded an accuracy of 85.60%, surpassing the Support
Vector Machine's 81.40%. A significance value of 0.002 (p<0.05) indicates that the results between the two
groups are statistically significant. The Gaussian Adaptive Threshold, therefore, stands out for its superior
accuracy.
1 INTRODUCTION
Adaptive thresholding is a type of image processing
method extensively employed in digital image
processing. In adaptive thresholding, image
segmentation is accomplished by setting the threshold
value equal to the sum of neighbouring values, where
weights are a Gaussian window (KuKuXia 2018).
Speed bumps are deemed a crucial component of the
road traffic control system. They are designed and
placed on roads to diminish vehicle speed and
enhance neighbourhood safety (Kosakowska 2022).
The project's most promising application is to offer
safer navigation for drivers, mitigating accidents
caused by overlooked speed bumps (Arunpriyan
2020). Moreover, human-caused abnormalities can
diminish when drivers are warned of approaching
speed bumps (Dewangan and Sahu 2021) (Palanivelu
et al. 2022).
A compilation of approximately 200 articles from
platforms such as Google Scholar, IEEE Xplore, and
Springer has been amassed over the past five years.
These articles propose distinct approaches to a
*
Research Scholar
†
Research Guide, Corresponding Author
specific issue. A notable strategy emphasised in the
literature involves a multivariate genetic algorithm, as
illustrated by Celaya-Padilla (2018). This algorithm
capitalises on data from IoT devices fitted with
accelerometers, GPS, and gyro sensors. Another
significant paper by Dewangan and Sahu (2021) uses
Raspberry Pi to detect speed bumps within an
Intelligent Vehicle System, achieving commendable
accuracy and precision (G. R et al. 2014).
In the quest to enhance the Advanced Driver
Assistance System, the identification of speed bumps
on well-marked roads is tackled by Devapriya, Babu,
and Srihari (2016) using Gaussian filtering, median
filtering, and connected component analysis.
Intriguingly, a more straightforward method for speed
bump detection and recognition using basic image
processing methods, which simultaneously triggers
driver alerts, is presented by Devapriya, Babu, and
Srihari (2015). Notably, an engaging paper that
utilises image processing techniques for speed bump
recognition, combined with gyro and sensor inputs, is
credited to Celaya-Padilla (2018). The research gap
for novel speed bump detection lies in the
inaccuracies when detecting a speed bump from an
Priyanka, R. and Priya, W.
Implementing an Efficient Speed Bump Detection System Using Adaptive Threshold Gaussian over Support Vector Machine for Improved Detection.
DOI: 10.5220/0012603100003739
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Artificial Intelligence for Internet of Things: Accelerating Innovation in Industry and Consumer Electronics (AI4IoT 2023), pages 527-532
ISBN: 978-989-758-661-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
527
image taken from a long distance, and occasionally,
there is false detection in the images. Existing
methods seem to possess lesser accuracy in
recognising speed bumps and require a significant
amount of time to alert the drivers. The primary aim
of this research is to achieve better accuracy by
comparing two algorithms: Adaptive Gaussian
Thresholding and Support Vector Machine for speed
bump detection.
2 MATERIALS AND METHODS
The research for this project took place within the
Compiler Design Laboratory at the Saveetha School
of Engineering, part of the Saveetha Institute of
Medical and Technical Sciences. This study
comprises two distinct research groups: Adaptive
Gaussian Thresholding and Support Vector Machine,
with differentiation based on their ability to detect
speed bumps in images. Of the 120 samples used, 60
samples each are assigned to these groups, as detailed
by Arunpriyan (2020). Both groups undergo 10
iterative processes, ensuring reliable results. The
dataset, sourced from Kaggle.com, contains 6000
images; 4800 for training and the rest for testing. The
sample size was influenced by previous research,
particularly that of Devapriya, Babu, and Srihari
(2016). The study employs a 95% confidence interval
and maintains a pretest power of 80% for robust
statistical outcomes.
The research framework demands 4GB of RAM
for prompt program processing. An Intel(R) CPU @
1.10GHz or its superior version is recommended. The
study used Windows 11 as its operating system. A
storage space of 30GB is essential to house the
collected dataset images, store the code, and
accommodate necessary plugins. The Jupyter
Notebook is utilised to operate the framework and test
the program on images featuring speed bumps.
Adaptive Threshold- Gaussian
Adaptive thresholding, a facet of Image Binarisation,
encompasses two primary methods: Adaptive
Threshold Mean and Adaptive Threshold Gaussian.
The following table 1 consists of accuracies of a
sample size of 10 for both the Adaptive Threshold
Gaussian (ATG) algorithm and the Support Vector
Machine (SVM) algorithm.
Table 1.
S.No ATG SVM
1 83 84
2 84 81
3 89 83
4 87 80
5 85 79
6 87 85
7 84 78
8 89 80
9 80 83
10 88 81
The table below presents comprehensive statistics for
two distinct groups, each comprising a sample size of
N=10. The mean percentage accuracy achieved by the
Adaptive Gaussian Thresholding method is
documented at 85.60%, while the accuracy
percentage attributed to the Support Vector Machine
algorithm registers at 81.40%.
Table 2.
Groups
N
Mean
Std.
Deviation
Std. Error
Rate
Accuracy
ATG 10 85.602.91357 0.92135
SVM 10 81.40 2.270580.71802
This technique separates the desired object from
the background based on the varying pixel intensities
throughout the image. Instead of a manually specified
threshold or fixed constraints, adaptive thresholding
automatically determines the threshold value in
relation to the image pixels, converting them into
grayscale or a binary format. This method enables an
automatic selection of the threshold value to
differentiate the main subject from its backdrop,
especially beneficial in scenarios with fluctuating
lighting, colour, or contrast in the image.
AI4IoT 2023 - First International Conference on Artificial Intelligence for Internet of things (AI4IOT): Accelerating Innovation in Industry
and Consumer Electronics
528
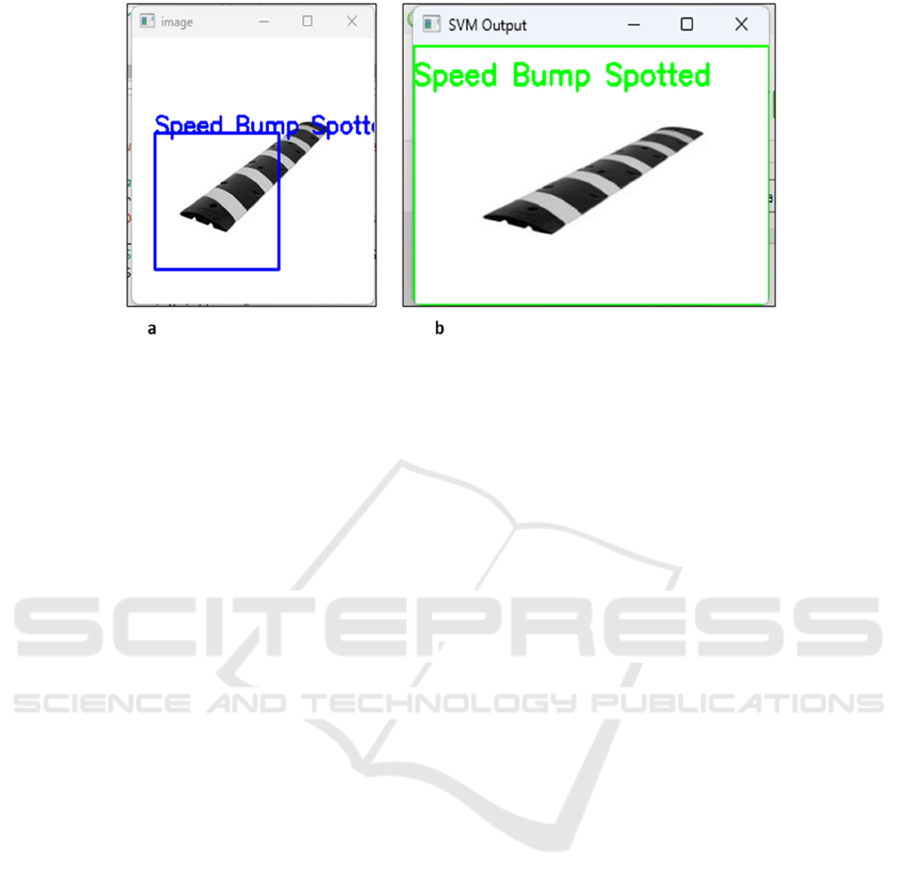
Figure 1: (a) The output of Adaptive Gaussian Threshold and (b) The output of Support Vector Machine.
Here's the Adaptive Threshold-Gaussian algorithm
steps, rephrased in British English:
Step 1: Images are imported from the dataset for
preprocessing, ensuring they're appropriately
formatted for computational processing.
Step 2: During preprocessing, each image is resized
to a standard dimension of 200x350, which trims
unnecessary parts of the images.
Step 3: Once resized, RGB colour images are
transformed into grayscale using the luminosity
method. This colour conversion simplifies the
computational demands.
Step 4: The Adaptive Threshold Gaussian algorithm
is then applied to the grayscale images, turning them
into binary images.
Step 5: A state-of-the-art speed bump detection
system is then utilised, employing the Haar Cascade
classifier, which has been trained on various speed
bump images.
Step 6: Successfully identified speed bumps are
emphasised with bounding boxes, signalling their
detection.
Support Vector Machine
The Support Vector Machine (SVM) is pivotal in the
suite of supervised learning algorithms, being
especially prominent in both classification and
regression tasks. Specifically, when diving into object
recognition, which includes detecting speed bumps,
SVM's expertise falls under the classification sphere.
At its core, SVM focuses on pinpointing and
earmarking the key vectors and boundary points in
data distributions. These elements are critical in
setting the hyperplane that segregates distinct classes
in the data realm. As the name suggests, support
vectors are these integral data points underpinning the
SVM approach.
Steps for the Support Vector Machine algorithm:
Step 1: Employing deep learning techniques such as
HOG, the dataset images are ingested and key
features extracted.
Step 2: Resizing images enhances detection precision.
Subsequently, the dataset is partitioned into training
and testing subsets.
Step 3: With the data prepped, an SVM classifier is
formulated using sklearn, and it's trained using the
provided dataset.
Step 4: Object localisation is undertaken in two
phases: initially via sliding windows and then through
heatmapping. The sliding window outlines the
potential detection area with a bounding box.
Step 5: Bounding boxes in static regions signal false
detections, whilst those in recognised regions denote
true detections.
Step 6: As mentioned, object localisation follows a
dual process: firstly through sliding windows, and
then supplemented by a heatmap to reaffirm bounding
box demarcations.
Step 7: Depending on detection outcomes, a
confusion matrix is developed. This matrix
subsequently facilitates the calculation of system
accuracy.
Statistical Analysis
For the statistical analysis of the results, IBM SPSS
version 29 was utilised. The mean accuracies were
compared using an independent sample t-test, with the
confidence level set at 95% and the standard deviation
error fixed at +/-2SD (Elliott and Woodward 2020).
The research's independent variables encompass
accuracy and the quantity of input images, whilst there
isn't a dependent variable identified. The research
utilised a sample size of (N=10), and the observed
significance value stands at 0.002.
Implementing an Efficient Speed Bump Detection System Using Adaptive Threshold Gaussian over Support Vector Machine for Improved
Detection
529
3 RESULTS
Both the Adaptive Threshold Gaussian and Support
Vector Machine algorithms were executed multiple
times using the Jupyter notebook platform. The
results showed that Group1, employing the Adaptive
Threshold Gaussian algorithm, achieved an accuracy
of 85.60%. In contrast, Group 2, utilising the Support
Vector Machine algorithm, registered an accuracy of
81.40%. This indicates that the Adaptive Threshold
Gaussian algorithm outperforms the Support Vector
Machine algorithm in terms of accuracy.
Table 1 enumerates the accuracy values derived
from both the Adaptive Threshold Gaussian and
Support Vector Machine algorithms. Table 2
delineates the mean accuracy values and standard
deviation calculations for both algorithms.
Meanwhile, Table 3 lists samples from the
independent t-tests comparing the two algorithms. A
graphical representation showcasing these values for
both algorithms is provided.
Figure 1 showcases the outputs of both the
Support Vector Machine and the Adaptive Gaussian
Thresholding. While the Support Vector Machine
detects the entire background along with the speed
bump, the Adaptive Gaussian Thresholding zeroes in
on a specific section of the speed bump.
Figure 2 visually contrasts the mean accuracies of
the Adaptive Threshold Gaussian and Support Vector
Machine algorithms. The concluding data infers that
the Support Vector Machine is less effective than the
Adaptive Threshold Gaussian algorithm, with the
mean accuracy detection positioned at +/-2SD.
4 DISCUSSION
From the research results presented, it is
unequivocally clear that the Adaptive Gaussian
threshold algorithm outperforms the Support Vector
Machine algorithm, thus validating the hypothesis.
The accuracy percentage gleaned for the Adaptive
Gaussian threshold algorithm stands at 85%, whereas
the Support Vector Machine algorithm achieved an
accuracy of 81%. The Adaptive threshold algorithm
finds precedent in various related research pursuits,
such as face detection, motion detection, and content
recognition (Devapriya 2015). While the Support
Vector Machine is renowned for its robustness as a
classification and regression algorithm across myriad
application fields (Cervantes 2020), the Adaptive
Gaussian Threshold emerges as particularly suited for
speed bump detection. This is attributable to its
proficiency in converting RGB images into grayscale,
enhancing the accuracy of detection (Celaya-Padilli
2018). Though sophisticated hardware like the
NVIDIA GPU and Stereolabs ZED Stereo camera can
facilitate the recognition and detection of speed
bumps (Varma 2018), they invariably demand
specific prerequisites and considerable investments.
The approach of stereo vision, applied to local binary
pattern images, presents a unique technique for
detecting delineated speed bumps (Ballinas-
Hernández, Olmos-Pineda, and Olvera-López 2022).
However, the accuracy of such detection can
sometimes leave room for improvement. Various
machine learning algorithms, including Naive Bayes,
Multi-Layer Perceptron, and Random Forest, have
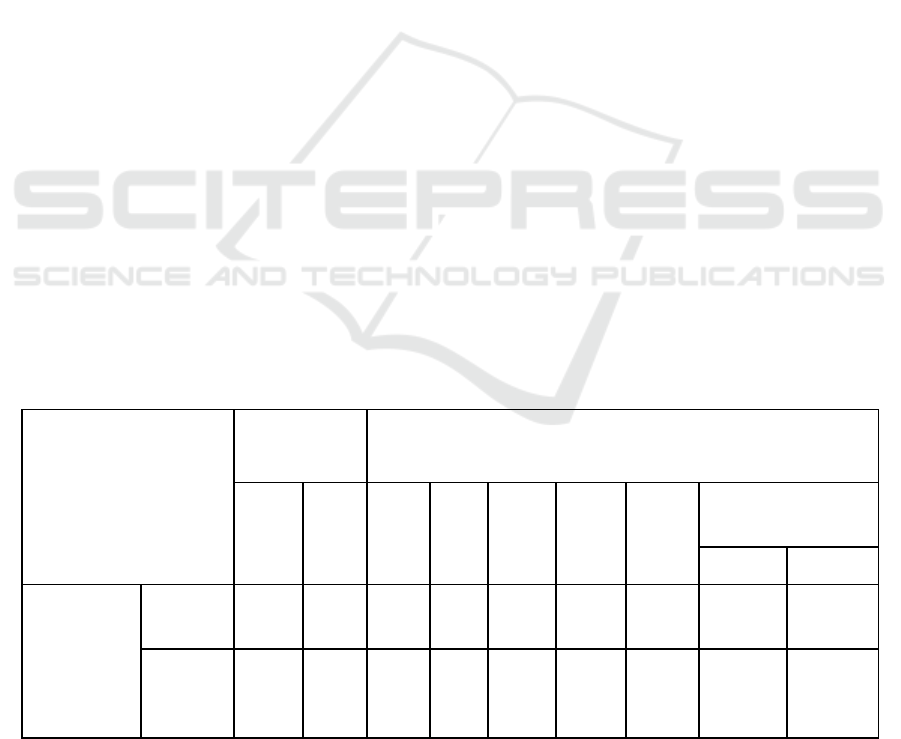
Table 3: Independent Sample t-Test for Accuracy Comparison with 95% Confidence Interval and Equal Variance Assumption.
Levene’s test for
equality of
variances
T-test for equality of means
F
Sig.
t
df
Sig. (2-
tailed)
Mean
difference
Std.
Error
difference
95% confidence
Interval of the
difference
Lower Upper
Accuracy
Equal
Variance
assume
d
0.815 0.037 3.596 18 0.002 0.053 4.20 1.74 6.65
Equal
variance
Not
assumed
3.596 16.9 0.002 0.053 4.20 1.73 6.66
AI4IoT 2023 - First International Conference on Artificial Intelligence for Internet of things (AI4IOT): Accelerating Innovation in Industry
and Consumer Electronics
530
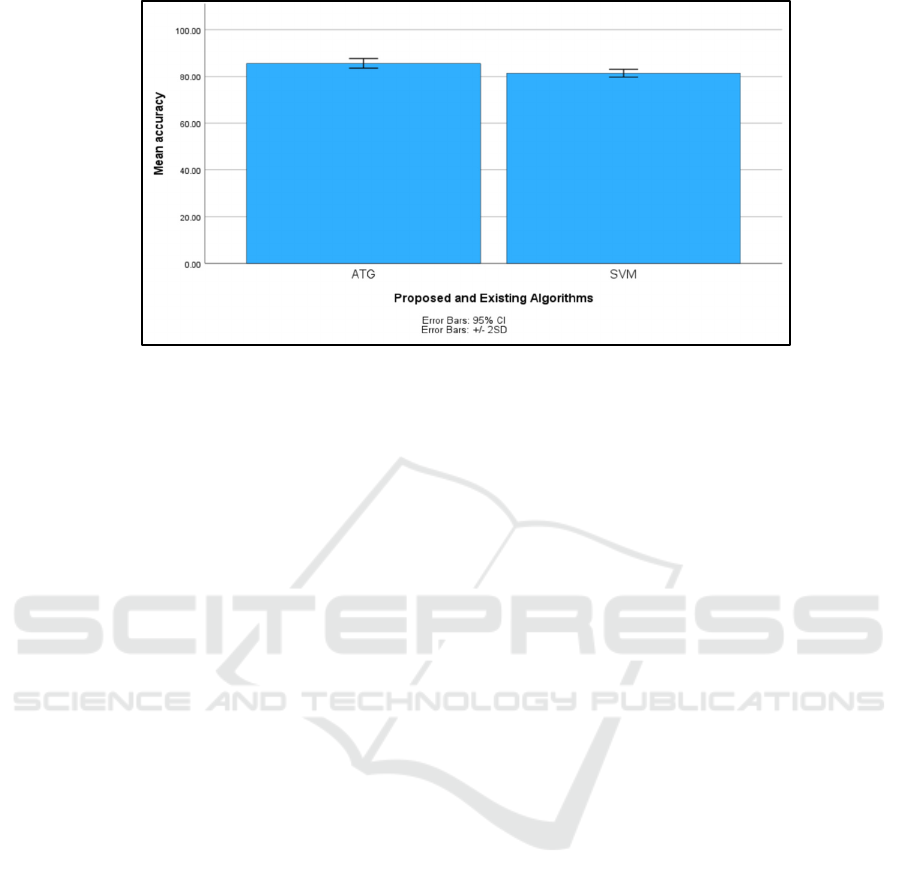
Figure 2: Comparison of Mean Accuracies between Existing and Proposed Algorithms. This bar chart illustrates a comparison
of mean accuracies, with the Y-axis representing accuracy values and the X-axis denoting the proposed and existing
algorithms. The mean accuracy for the Adaptive Gaussian Thresholding is recorded at 85%, while the Support Vector
Machine algorithm achieves an accuracy of 81%.
been trialled for detecting speed bumps using datasets
sourced from GoPro cameras (Marques 2021).
Nonetheless, the research indicates that deep learning
algorithms consistently deliver the most accurate and
superior performance.
This research is not without its limitations. In
scenarios where images are captured under deficient
lighting conditions, the speed bump detection
deteriorates, leading to compromised accuracy. The
research's overarching objective is multifaceted: it
aims to detect speed bumps from various perspectives
and discern unmarked speed bumps. However,
challenges arise when an unmarked speed bump is
used as input, resulting in a substantial drop in
detection accuracy. One key feature that sets a speed
bump apart from a crosswalk is its elevation. Yet, in
certain images, this elevation isn't distinctly outlined,
making detection arduous. Looking ahead, the future
of novel speed bump detection holds promise in real-
time video detection of both marked and unmarked
speed bumps. As techniques evolve, advanced DNN
methodologies could provide an avenue for even
more precise speed bump detection on roads.
5 CONCLUSION
The conducted research clearly delineated the
comparative efficiencies of the Adaptive Gaussian
Threshold algorithm and the Support Vector Machine
algorithm in the realm of speed bump detection. With
the former securing an accuracy of 85.60% and the
latter managing 81.40%, the Adaptive Gaussian
Threshold algorithm unequivocally outshone its
counterpart. This outcome was not merely a casual
observation; it held statistical weight, given the
achieved significance value of 0.002. This value,
being less than the conventional threshold of 0.05,
reinforced that the performance discrepancy between
the two algorithms was not due to random chance but
was indeed statistically significant. In essence, for
those seeking to deploy an algorithm for detecting
speed bumps with optimal accuracy, the Adaptive
Gaussian Threshold algorithm emerges as the more
promising choice over the Support Vector Machine
algorithm, as corroborated by the empirical evidence
presented in this study.
REFERENCES
Arunpriyan, J., V. V. Sajith Variyar, K. P. Soman, and S.
Adarsh. 2020. “Real-Time Speed Bump Detection
Using Image Segmentation for Autonomous Vehicles.”
In Advances in Intelligent Systems and Computing,
308–15. Advances in Intelligent Systems and
Computing. Cham: Springer International Publishing.
Ballinas-Hernández, Ana Luisa, Ivan Olmos-Pineda, and
José Arturo Olvera-López. 2022. “Marked and
Unmarked Speed Bump Detection for Autonomous
Vehicles Using Stereo Vision.” Journal of Intelligent &
Fuzzy Systems 42 (5): 4685–97.
Celaya-Padilla, Jose M., Carlos E. Galván-Tejada, F. E.
López-Monteagudo, O. Alonso-González, Arturo
Moreno-Báez, Antonio Martínez-Torteya, Jorge I.
Galván-Tejada, Jose G. Arceo-Olague, Huizilopoztli
Luna-García, and Hamurabi Gamboa-Rosales. 2018.
“Speed Bump Detection Using Accelerometric
Features, Gaussian Thresholding: A Genetic Algorithm
Implementing an Efficient Speed Bump Detection System Using Adaptive Threshold Gaussian over Support Vector Machine for Improved
Detection
531

Approach.” Sensors 18 (2).
https://doi.org/10.3390/s18020443.
Cervantes, Jair, Farid Garcia-Lamont, Lisbeth Rodríguez-
Mazahua, and Asdrubal Lopez. 2020. “A
Comprehensive Survey on Support Vector Machine
Classification: Applications, Challenges and Trends.”
Neurocomputing 408 (September): 189–215.
Devapriya, W., C. Nelson Kennedy Babu, and T. Srihari.
2015. “Advance Driver Assistance System (ADAS) -
Speed Bump Detection.” In 2015 IEEE International
Conference on Computational Intelligence and
Computing Research (ICCIC), 1–6.
———. 2016. “Real Time Speed Bump Detection Using
Gaussian Filtering and Connected Component
Approach.” In 2016 World Conference on Futuristic
Trends in Research and Innovation for Social Welfare
(Startup Conclave), 1–5.
Dewangan, Deepak Kumar, and Satya Prakash Sahu. 2021.
“Deep Learning-Based Speed Bump Detection Model
for Intelligent Vehicle System Using Raspberry Pi.”
IEEE Sensors Journal 21 (3): 3570–78.
Elliott, Alan C., and Wayne A. Woodward. 2020. “Quick
Guide to IBM® SPSS®: Statistical Analysis With Step-
by-Step Examples.”
https://doi.org/10.4135/9781071909638.
G. Ramkumar and M. Manikandan, "Uncompressed digital
video watermarking using stationary wavelet
transform," 2014 IEEE International Conference on
Advanced Communications, Control and Computing
Technologies, Ramanathapuram, India, 2014, pp.
Kosakowska, Katarzyna. 2022. “Evaluation of the Impact
of Speed Bumps on the Safety of Residents - Selected
Aspects.” Transportation Research Procedia 60
(January): 418–23.
Kishore Kumar, M. Aeri, A. Grover, J. Agarwal, P. Kumar,
and T. Raghu, “Secured supply chain management
system for fisheries through IoT,” Meas. Sensors, vol.
25, no. August 2022, p. 100632, 2023, doi:
10.1016/j.measen.2022.100632.
KuKuXia. . 13_Adaptive_thresholding.py at Master ·
KuKuXia/OpenCV_for_Beginners. Github. Accessed
December 27, 2022.
https://github.com/KuKuXia/OpenCV_for_Beginners.
Marques, Johny, Raulcezar Alves, Henrique C. Oliveira,
Marco MendonÇa, and Jefferson R. Souza. 2021. “An
Evaluation of Machine Learning Methods for Speed-
Bump Detection on a GoPro Dataset.” Anais Da
Academia Brasileira de Ciencias 93 (1): e20190734.
Varma, V. S. K. P., S. Adarsh, K. I. Ramachandran, and
Binoy B. Nair. 2018. “Real Time Detection of Speed
Hump/Bump and Distance Estimation with Deep
Learning Using GPU and ZED Stereo Camera.”
Procedia Computer Science 143 (January): 988–97.
Marques, Johny, Raulcezar Alves, Henrique C. Oliveira,
Marco MendonÇa, and Jefferson R. Souza. 2021. “An
Evaluation of Machine Learning Methods for Speed-
Bump Detection on a GoPro Dataset in driver assistance
system.” Anais Da Academia Brasileira de Ciencias 93
(1): e20190734.
Palanivelu, J., Thanigaivel, S., Vickram, S., Dey, N.,
Mihaylova, D., & Desseva, I. (2022). Probiotics in
functional foods: survival assessment and approaches
for improved viability. Applied Sciences, 12(1), 455.
Rokhim, Abdul, Hanendyo Putro, and Dani F. Brilianti.
2022. “Automatic Speed Bump (ASeB) to Reduce the
Rate of Traffic Accident in image processing” RSF
Conference Series: Engineering and Technology 2 (2):
79–87.
Varma, V. S. K. P., S. Adarsh, K. I. Ramachandran, and
Binoy B. Nair. 2018. “Real Time Detection of Speed
Hump/Bump and Distance Estimation with Deep
Learning Using GPU and ZED Stereo Camera.”
Procedia Computer Science 143 (January): 988–97.
V. P. Parandhaman, "An Automated Efficient and Robust
Scheme in Payment Protocol Using the Internet of
Things," 2023 Eighth International Conference on
Science Technology Engineering and Mathematics
(ICONSTEM), Chennai, India, 2023, pp. 1-5, doi:
10.1109/ICONSTEM56934.2023.10142797.
Zheng, Zengwei, Mingxuan Zhou, Yuanyi Chen, Meimei
Huo, and Dan Chen. 2019. “Enabling Real-Time Roads
Anomaly Detection via Mobile Edge Computing.”
International Journal of Distributed Sensor Networks
15 (11): 1550147719891319.
AI4IoT 2023 - First International Conference on Artificial Intelligence for Internet of things (AI4IOT): Accelerating Innovation in Industry
and Consumer Electronics
532
