
The Analysis of Image Inpainting Based on Pix2Pix Model and Mix
Loss
Xu Yan
School of Statistic and Data Science, Nankai University, Tianjin, China
Keywords: Image Translation, Pix2Pix, Loss Function.
Abstract: This paper investigates the application of image translation as an important use case for generative adversarial
networks (GAN), which has received widespread attention from scholars in recent years. This study builds an
Image-to-image translation (Pix2Pix) model with a U-net as the generator and PatchGAN as the discriminator
and observes the performance by adjusting the loss function of the generator. First experiment is modifying
the scale factors for GAN Loss and Mean Absolute Error loss (L1 Loss), and the second is exchanging L1
Loss with square loss function (L2 Loss). After comparing the image authenticity and detail processing of
different results, it is noticed that an overall better translation is achieved when the scale factor is set to 1:100.
If finer detail handling is required, lowering the scale factor to 1:10 can be beneficial. However, it's also found
that including L2 Loss in the generator loss function do not yield favorable results. It provides guidance for
future choices of hyperparameters for the pix2pix model and lays the foundation for further research into loss
functions.
1 INTRODUCTION
Image processing is a technique that can repair
damaged portions of target images, reconstructing
them to generate high-quality, deeply semantically
approximated original images. In recent years, with
the advancement of computer computational
capabilities and rapid development of machine
learning, achievements in computer vision have
greatly enhanced scientific technology and human
quality of life. Deep learning-based image processing
techniques play a crucial role in many practical
applications, such as object removal in image editing,
restoration of old photos, repair of occluded portions
of specific objects, facial restoration, and more (Lecun
1998). Currently, it is one of the main focal points of
research in the field of computer vision.
The inception of Convolutional Neural Networks
(CNN) enabled to extracting image semantics and
features, making it one of the earliest neural network
models employed in image processing. Moreover, due
to its capability to extract image features, CNNs can
also be utilized in tasks like texture synthesis and
image style transfer (Gatys et al 2015 & GatyS et al
2016). The introduction and widespread application of
Generative Adversarial Networks (GAN) have further
enhanced the visual outcomes of image inpainting
(Goodfellow et al 2014). In the realm of image
processing using GANs. Yu et al. introduced the
concept of gated convolutions, which elevated the
effectiveness of image restoration (Yu et al 2019).
However, due to the larger model size and a high
number of parameters, training costs are significantly
increased. Also, because of the uncertainty in filling
the missing regions of damaged images using regular
GAN methods, it is challenging to determine the
inpainting area, which can even lead to severe
restoration errors. A two-stage visual consistency
network was proposed, consisting of a mask
prediction module and a robust restoration module
(Wang et al 2020). This approach significantly
improved the model's generalization ability. By
incorporating image semantic understanding by
introducing an attention mechanism, the precision of
the restored images can be further enhanced (Yu et al
2018). While the former often leads to image
discontinuity issues, Liu et al. introduced a coherence
semantic attention mechanism, as mentioned in
reference, which focuses on the interrelation of deep
features in the area to be restored (Liu et al 2019). This
effectively resolves color discontinuities and
boundary distortions. Image-to-image translation with
Conditional Adversarial Networks (Pix2Pix) is an
438
Yan, X.
The Analysis of Image Inpainting Based on Pix2Pix Model and Mix Loss.
DOI: 10.5220/0012804900003885
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Analysis and Machine Learning (DAML 2023), pages 438-443
ISBN: 978-989-758-705-4
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
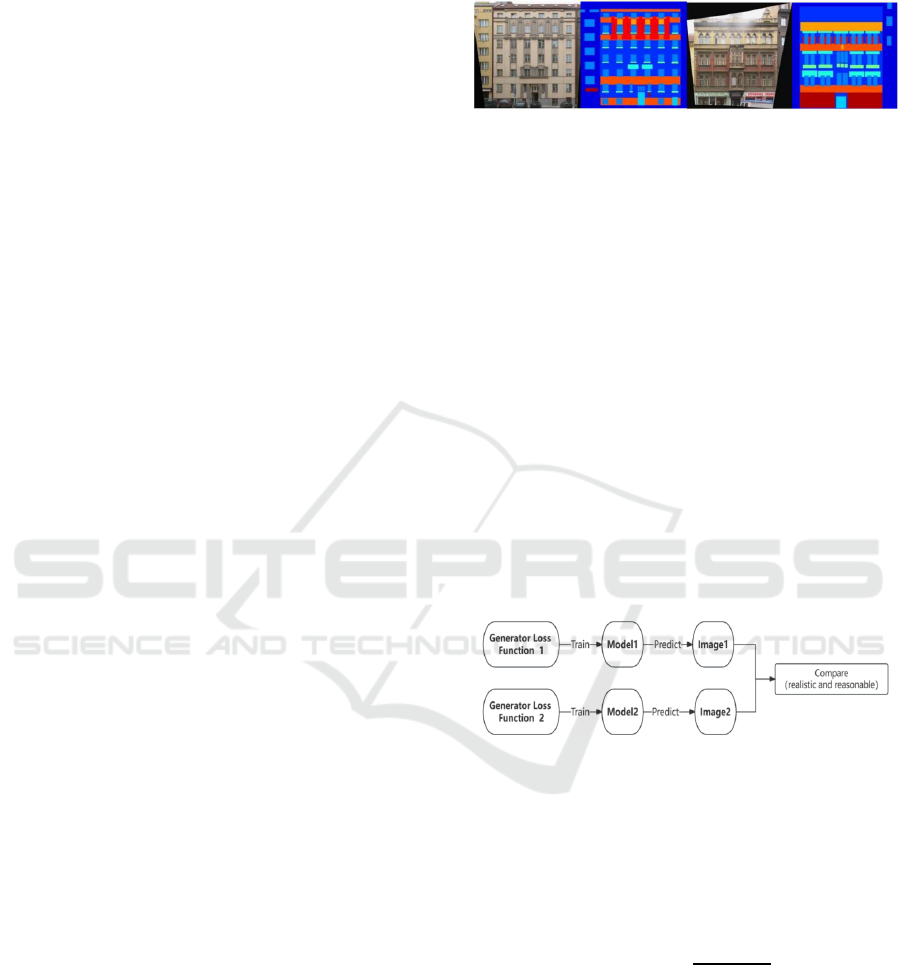
image translation technique based on GAN. It is used
to transform images from one type to another type.
The same model architecture exhibits varying
gradients under different loss functions, thereby
affecting training efficiency and outcomes. Indeed, by
modifying the loss function expression, you can
enhance the clarity and coherence of generated images.
The main objective of this study is to modify the
loss function formula of the generator to observe the
effects of different loss functions on image translation
results. The pix2pix model employs Mix Loss, a
combination of GAN loss and Mean Absolute Error
loss (L1 loss), to define the generator's loss function.
This article aims to explore the advantages and
limitations of this defined approach. First, the
differences are observed in training effects between
adding L1 loss to the generator's loss function and not
having L1 loss. Second, it conducting multiple
experiments by adjusting the ratio of L1 loss to GAN
loss in the generator of the pix2pix model. The
prediction results are obtained for the same input data
from different models trained for the same number of
iterations. Third, the training results of the model at
the same epoch under different coefficient ratios are
observed and compared. In addition, this paper
employs No-Reference Blind Video Quality
Assessment (NR-BVQA) in combination with human
subjective perception to assess the coherence and
authenticity of generated images. The experimental
results demonstrate that using only the GAN loss can
lead to gradient explosion, and if the L1 loss ratio is
too small, it can result in severe image distortion,
while if the L1 loss ratio is too large, it can cause the
image to become overly blurry. In particular, if L1 loss
is replaced with square loss function (L2 loss),
although it can accelerate convergence, the final
results may become excessively smooth and lose
image details.
2 METHODOLOGY
2.1 Dataset Description and
Preprocessing
The dataset used in this study called “facade” is
sourced from Kaggle's pix2pix dataset (Dataset). This
dataset consists of paired images, with each pair
containing a photograph of a building and its
corresponding sketch at the same resolution. In this
dataset, the network is trained to translate hand-
drawn sketches of buildings. The entire dataset
comprises 400 pairs of training data and 106 pairs of
test data. Figure 1 shows an example of the training
data.
Figure 1: Images from the facade dataset (Original).
2.2 Proposed Approach
Under the same model, different choices of loss
functions can impact the convergence of the loss
function, the model's learning rate, and the accuracy
of predictions, significantly influencing the model's
performance. This paper places a strong emphasis on
analyzing the performance of the pix2pix model under
different generator loss functions. This analysis
includes modifying the hyperparameters of the loss
function and changing the composition structure of the
generator loss. By observing the prediction results of
the same sketch under different loss functions, it seeks
to explore the strengths and weaknesses of the loss
function choices as discussed in the original paper
(Isola et al 2017). In the end, the paper aims to provide
insights into selecting the most suitable loss function
for different tasks. The experimental workflow is
illustrated in Figure 2.
Figure 2: The pipeline of the study (Original).
2.2.1 L1 Loss
The L1 Loss is calculated by adding the absolute
differences between each predicted value and its
corresponding target value, and then taking the
average. The mathematical expression for L1 Loss is:
(1)
where the
represent the prediction of y and
represent the true value of y. One characteristic of L1
Loss is that it's insensitive to outliers because it
employs absolute differences. This property makes it
perform well on datasets with a considerable amount
of noise. L1 Loss can be used to measure the absolute
difference between generated images and target
images. This helps improve the stability of the
The Analysis of Image Inpainting Based on Pix2Pix Model and Mix Loss
439
generator, making the generated images closer to the
target images. During training, L1 Loss serves as an
important feedback signal, assisting the generator in
gradually producing more realistic images.
2.2.2 L2 Loss
L2 Loss, also known as Mean Squared Error, is
indeed a loss function commonly used for regression
problems. The mathematical expression for L2 Loss
is as follows:
(2)
The advantage of L2 loss is that it is a smooth,
continuously differentiable function, which makes it
easy to handle in optimization algorithms like
gradient descent. Additionally, it is typically a convex
function, implying it has a global minimum.
However, L2 loss calculates errors using squared
terms, which means it is more sensitive to large errors
because squaring amplifies the impact of these errors.
2.2.3 GAN Loss
Adversarial Loss as one of the primary
implementations of Generator Loss, is typically
represented in the specific form of Binary Cross-
Entropy Loss. It pushes the model's training by
having the generator and discriminator engage in
mutual competition. The generator aims to create
more realistic data, while the discriminator strives to
differentiate between real and generated data. This
adversarial training approach leads to continuous
improvement in the generator's ability to produce
more authentic data. However, GAN loss training is
often less stable compared to traditional supervised
learning because the competition between the
generator and discriminator can result in oscillations
during the training process. Therefore, it's crucial to
carefully select hyperparameters and employ various
techniques to stabilize the training. Additionally,
during the experiments, we also attempted to replace
L1 Loss with L2 Loss and observed the training
results.
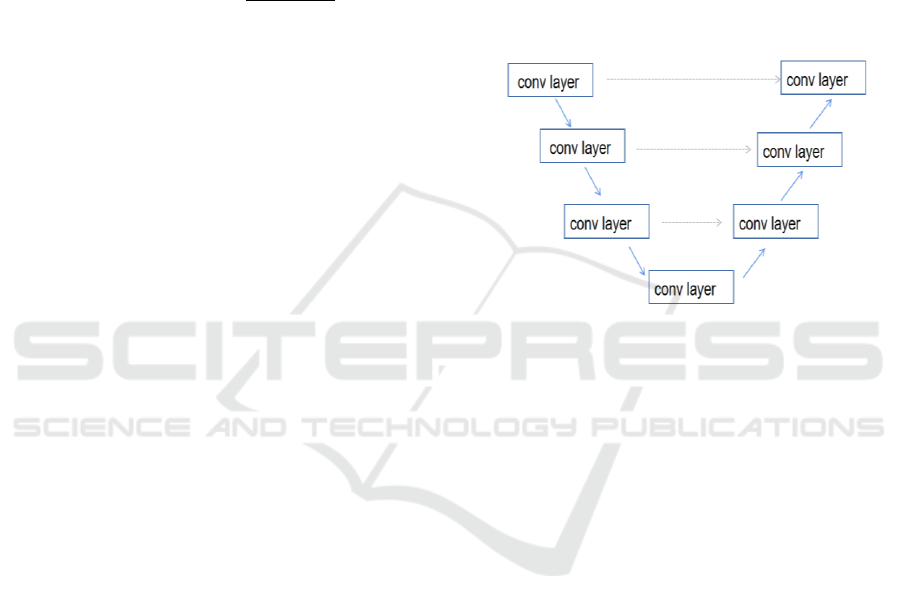
2.2.4 Unet
The generator in the pix2pix model uses a U-net
network architecture. It is a deep learning
convolutional neural network architecture consisting
of an encoder and a decoder. The first half is used for
feature extraction, while the second half is used for
upsampling. Its specific network architecture is
shown in Figure 3. In this architecture, the down-
sampling path consists of convolutional layers and
pooling layers, which are used to reduce image
resolution, decrease the spatial size of the image, and
simultaneously extract image features. In contrast, the
up-sampling path serves the opposite purpose and has
a complementary architecture compared to the down-
sampling path. U-Net also employs skip connections
to connect feature maps of different depths between
the encoder and decoder. This helps in transmitting
both low-level and high-level features, addressing the
common issue of information loss. The U-net
network's five pooling layers enable it to achieve
multi-scale feature recognition in images, making it
highly effective for semantic image segmentation.
Figure 3: Unet architecture (Original).
2.3 Implementation Details
In this experiment, the choice of using the Adam
optimizer is justified. Adam has relatively low
demands on storage and computational resources,
making it advantageous for deep neural networks
dealing with large-scale data and parameters.
Additionally, Adam's ability to adaptively adjust the
learning rate can accelerate the model's training
process. Simultaneously, we trained each model for a
total of 20 epochs to ensure that we could observe
variations in training results among different models
and also assess differences in training efficiency. In
the selection of hyperparameters, the experiments
conduct four different ratios of GAN Loss to L1 Loss,
namely 1:100, 1:200, 1:10, and 1:1, and observe the
impact of GAN Loss and L1 Loss on the training
results under these various ratio combinations.
3 RESULTS AND DISCUSSION
In the results section, the paper showcases and
discussed the image translation outcomes under
various loss functions. Keeping the training dataset
consistent with the pix2pix dataset and maintaining all
DAML 2023 - International Conference on Data Analysis and Machine Learning
440
training parameters except the loss functions
unchanged, different models will attempt to translate
the same test image at the same number of training
iterations and then compare the translated images to
evaluate the differences between different models.
This chapter will consist of two parts: Scale Factor
Selection and Choice of L1 and L2.
3.1 The Performance of Scale Factor
Selection
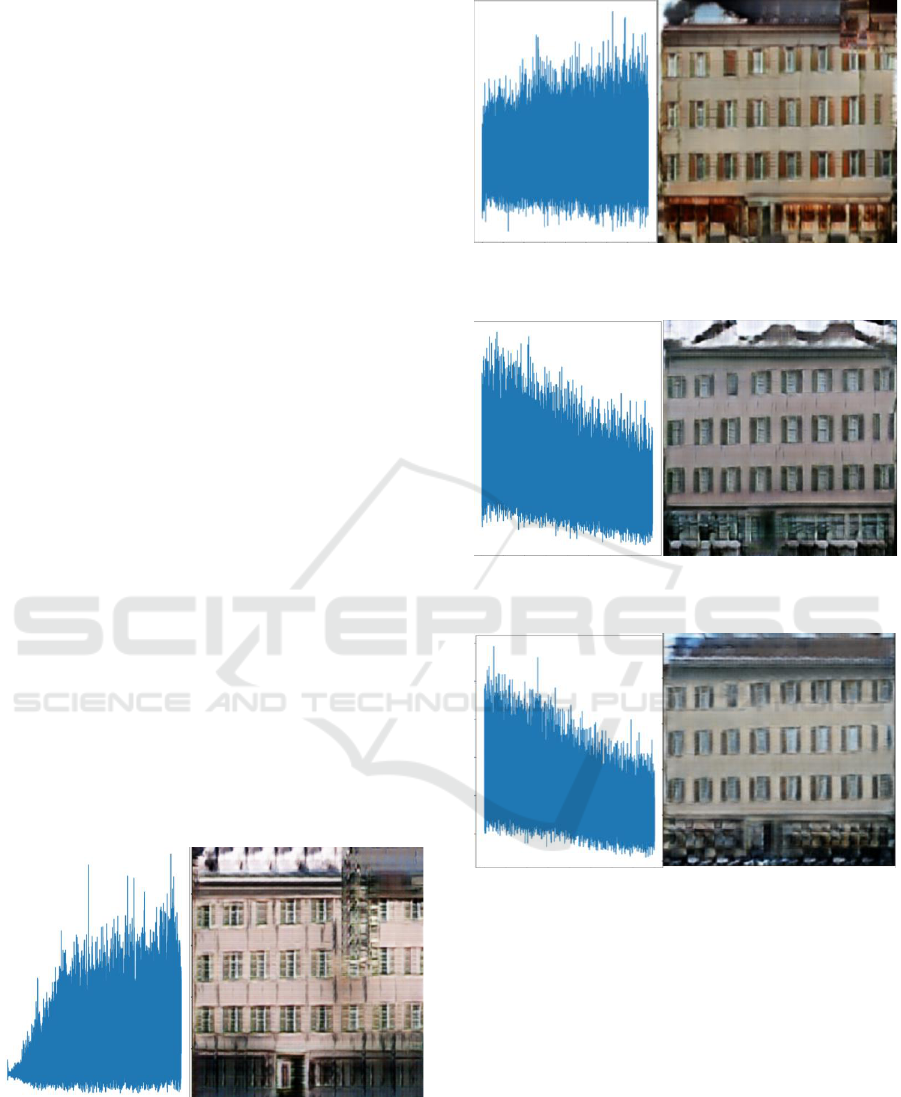
As can be seen from Figure 4-7, under 20 epochs, each
model has provided its respective training results.
From the loss function curves, it is evident that when
the L1 loss proportion is relatively higher, there is a
noticeable downward trend in the loss function. This
leads to good prediction performance even before
complete convergence is achieved. Conversely, when
the L1 loss proportion is too small, the loss function
exhibits strong oscillations, and there is no sign of
convergence even with increased training cycles. This
behavior is attributed to the nature of the GAN loss
itself, which struggles to converge without the
presence of pre-training data. From the translation of
the hand-draw images, it can be observed that the
translation results are better when the scale factor is
set at 1:10 and 1:100. In comparison, when the L1 loss
proportion is too small, although the image resolution
is higher, it leads to the generation of more
inconsistent regions. On the other hand, in cases where
the L1 loss proportion is higher, since the L1 loss
measures the absolute difference between the original
and predicted images, it results in both reduced image
resolution and enhanced image smoothness. Therefore,
adjusting the scale factor to balance resolution and
smoothness is a key aspect of the experiment.
Figure 4: Loss Function Curves and Results When
(Original).
Figure 5: Loss Function Curves and Results When
(Original).
Figure 6: Loss Function Curves and Results When
(Original).
Figure 7: Loss Function Curves and Results When
(Original).
3.2 The Performance of Choice of L1
and L2
As can be seen from Figure 8-11, L1 loss tends to
generate relatively smooth results but may result in the
loss of some details, whereas L2 loss tends to produce
more precise translated images but may also make the
generated images more susceptible to noise. As can be
seen from figure 8-11, when the scale factor is set to
1:100, it can be observed that L1 loss converges
significantly while L2 loss does not. This is because
L2 loss is more likely to get stuck in local minima and
may struggle to achieve a smaller loss, whereas L1
The Analysis of Image Inpainting Based on Pix2Pix Model and Mix Loss
441

loss, being a convex function, does not face this issue.
At the same time, it can also be observed from the
results that when using L2 loss, the images are
noticeably blurrier, and artifacts are introduced. This
occurrence is because the square operation in L2 loss
penalizes large errors but is relatively insensitive to
small errors. As a result, it may not perform well in
terms of fine detail.
Figure 8: Loss Function Curves and Results When
(Original).
Figure 9: Loss Function Curves and Results When
(Original).
Figure 10: Loss Function Curves and Results When
(Original).
Figure 11: Loss Function Curves and Results When
(Original).
In summary, properly setting the ratio between
GAN Loss and L1 Loss can indeed contribute to the
training and translation performance of an image
translation network. Additionally, under specific
requirements, adjusting the values of these scale
factors can be used to control the model's translation
effect effectively.
4 CONCLUSION
This study presents the generation results of the
Pix2Pix model under different generator loss
functions. First, it constructs a Pix2Pix network with a
U-net as the generator and PatchGAN as the
discriminator. Second, it trains the model for image
translation ability using the Kaggle Pix2Pix dataset as
a training set. Then, it adjusts the scale factors for
GAN loss and L1 loss to observe overall better
translation results. The findings indicate that a higher
ratio of L1 loss results in lower resolution, while a
higher ratio of GAN loss leads to inconsistent regions
in the generated images. The study reveals that setting
the scale factor to 1:100 results in images that combine
realism and good resolution. On the other hand, a scale
factor of 1:10 can be employed to improve resolution,
particularly for finer details. Finally, the research
identifies that L2 loss does not promote model
convergence and is less suitable for handling details
compared to L1 loss. Therefore, it is not recommended
for use in this model. In the future, considering the
incorporation of other loss functions, such as SSIM
loss, into the generator loss function is a promising
avenue for enhancing image translation results.
DAML 2023 - International Conference on Data Analysis and Machine Learning
442

REFERENCES
Y. Lecun, L. Bottou, Y. Bengio, P. Haffner, “Gradient-
based Learning Applied to Document Recognition,”
Proceedings of the IEEE, vol. 86, 1998, pp. 2278-2324.
L. Gatys, A. S. Ecker, M. Bethge, “Texture synthesis using
convolutional neural networks, Advances in neural
information processing systems, 2015, p. 28
L. A. GatyS, A. S. Ecker, M. Bethge, “Image style transfer
using convolutional neural networks, Proceedings of
the IEEE conference on computer vision and pattern
recognition, 2016, pp. 2414-2423.
I. Goodfellow, J. Pouget-Abadie, M. Mirza, et al.
“Generative adversarial nets,” Advances in neural
information processing systems, 2014, p. 27.
J. Yu, Z. Lin, J. Yang, et al. “Free-form image inpainting
with gated convolution,” Proceedings of the IEEE/CVF
international conference on computer vision, 2019, pp.
4471-4480.
Y. Wang, Y. C. Chen, X. Tao, et al. “Vcnet: A robust
approach to blind image inpainting,” Computer Vision–
ECCV 2020: 16th European Conference, Glasgow,
2020, pp. 752-768.
J. Yu, Z. Lin, J. Yang, et al. “Generative image inpainting
with contextual attention,” Proceedings of the IEEE
conference on computer vision and pattern recognition,
2018, pp. 5505-5514.
H. Liu, B. Jiang, Y. Xiao, et al. “Coherent semantic
attention for image inpainting,” Proceedings of the
IEEE/CVF International Conference on Computer
Vision, 2019, pp. 4170-4179.
Dataset
https://www.kaggle.com/datasets/vikramtiwari/pix2pi
x-dataset
P. Isola, J. Y. Zhu, T. Zhou, et al. “Image-to-image
translation with conditional adversarial networks,”
Proceedings of the IEEE conference on computer vision
and pattern recognition, 2017, pp. 1125-1134.
The Analysis of Image Inpainting Based on Pix2Pix Model and Mix Loss
443
