
Real-Time 3D Reconstruction Based on Single-Photon LiDAR for
Underwater Environments
Yifei Chen
Department of Mechanical Engineering, Tsinghua University, Beijing, 100084, China
Keywords: Real-Time 3D Reconstruction, LiDAR, RT3D.
Abstract: This paper compares three real-time 3D reconstruction methods based on single-photon LiDAR technology
in underwater environments. Methods include the traditional cross-correlation method, the RT3D method
combining highly scalable computational techniques from the computer graphics field with statistical models,
and the ensemble method which combines surface detection and distance estimation are all explored. The
target was placed around three meters away from the transceiver system, and both were submerged in a 1.8-
meter-deep water tank as part of the experimental setup. The transceiver used a picosecond pulse laser source
that emitted light at a frequency of 20 MHz with a center wavelength of 532 nm. The results indicate that in
static scenarios, as the turbidity of the medium increases, the cross-correlation method exhibited the most
significant increase in noise and loss of surface detail; the RT3D method showed less noise increase but more
pronounced surface loss; the Ensemble Method overall performed the best. The cross-correlation approach
was found to be much faster than the other two ways in dynamic scenes, with the Ensemble approach being
marginally slower than the RT3D method, all three methods' processing times reduced as the attenuation
length rose. When the attenuation length exceeded 5.5AL, none of the methods could perform 3D
reconstruction, but both RT3D and Ensemble Methods could still produce clusters of points.
1 INTRODUCTION
Real-time 3D reconstruction is a popular area of study
within the domains computer vision that is used in
robot and other automated equipments. 3D
reconstruction is known as the process of recreating
different aspects of the natural world we are living in
into a virtual environment (Ingale 2021). Essentially,
it involves capturing the three-dimensional spatial
coordinates of every point on the surfaces of objects
in real-world scenes. These captured points,
embedded with spatial coordinate information, are
then depicted within a unified 3D coordinate system
using computer simulation software. This process
accurately restores the surface contours of all objects
within the target environment. When we raise our
requirements for 3D reconstruction to achieve real-
time processing, it allows users to interact in real-time
within the 3D scene, which opens up possibilities for
various real-time applications such as real-time
medical imaging, critical parameter measurement of
high-temperature metal components, AR real-time
interaction and mobile robot mapping and navigation
(Wollborn et al 2023, Wen et al 2021 & Wang et al
2023). Depending on the method of depth
information acquisition, real-time 3D reconstruction
techniques could be categorized into the following
main types: the active reconstruction and the passive
reconstruction. Active 3D reconstruction uses LiDAR
such as TOF depth cameras or structured light
methods like Microsoft's Kinect camera which sends
a predefined signal to the target object and then
receives and processes the returned signal to obtain
the object's depth information. Passive real-time 3D
reconstruction typically requires multiple image
captures using cameras. The images are then
processed to extract object feature information, which
is used to compute the object's three-dimensional
coordinates.
In the process of exploration and utilization of
marine resources, real-time 3D reconstruction offers
profound insights into comprehending and
capitalizing in underwater environment. Underwater
3D maps can help monitor coral reefs, record the
shapes of Cenotes, and support underwater rescue
operations (Williams and Mahon 2004 & Gary et al
2008). However, while real-time 3D reconstruction
technology is rapidly advancing due to the influence
184
Chen, Y.
Real-Time 3D Reconstruction Based on Single-Photon LiDAR for Underwater Environments.
DOI: 10.5220/0012816800003885
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Analysis and Machine Learning (DAML 2023), pages 184-191
ISBN: 978-989-758-705-4
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

of autonomous driving and mobile robot research,
underwater 3D reconstruction remains a challenging
research problem. This is because water, unlike air,
has high electrical conductivity and dielectric
constants. Thus, it is not easy to receive GPS signals
underwater. Additionally, the scattering and
absorption properties of light in water differ from
those in air. The presence of suspended particles in
water, originating from human or natural phenomena,
further attenuates light. (Menna et al 2018).
Therefore, it is challenging for cameras to extract
sufficient information for subsequent feature point
detection, matching, camera motion recovery, and
depth and disparity estimation of the 3D scene. The
unique physical properties of water also limit the use
of light detection and ranging system (LiDAR), a fast
and reliable 3D reconstruction method on land,
significantly reducing the effective detection range of
targets. In order to minimize the interference of the
underwater environment, to enhance the real-time
accuracy and robustness of underwater 3D
reconstruction, more effective sensors and data
processing methods are required.
In order to perform 3D reconstruction in water and
other complex media, researchers have developed
single-photon LiDAR imaging sensors in recent
years. Single-photon LiDAR imaging sensor has high
surface delineation capabilities and optical
sensitivity. The systems are typically based on the
Time-of-Flight (ToF) method and Time-Correlated
Single Photon Counting (TCSPC) technology.
Single-photon LiDAR utilizes short pulse widths and
high repetition rate lasers, combined with highly
sensitive detectors, to detect and count returned single
photons. Using TCSPC technology, single-photon
LiDAR is capable of high-resolution 3D single-
photon imaging in scattering underwater
environments (Maccarone et al 2015). Although there
are many advantages using single-photon LiDAR
imaging, capturing enough photon events to establish
accurate parameter estimates may require a long
acquisition time. To further increase the speed of
acquiring scene depth data and simplify the optical
configuration, researchers have developed the Single-
photon avalanche diode (SPAD) for active imaging.
A study by A. Maccarone et al. utilized a
Complementary Metal Oxide Semiconductor
(CMOS) SPAD detector array combined with TCSPC
timing electronic components, reaching visualization
frame rates of 10Hz in scattering environments with
distances up to 6.7AL between the moving target and
the systems (Maccarone et al 2019). However, these
studies did not achieve real-time imaging systems.
One of the main limitations comes from the data
processing segment. The SPAD array's high data rate
had a significant impact on data processing since
larger data volumes require longer processing times
to estimate the intensity and distance data distribution
of targets, which reduces the potential for real-time
reconstruction.
To further enhance the real-time capabilities of
single-photon 3D reconstruction technology,
researchers have developed custom computational
models implemented on Graphics Processing Units
(GPUs). J. Tachella et al. introduced a Real-time 3D
algorithm (RT3D) that uses point cloud denoising
tools presented priviously in a plug-and-play
framework. The RT3D method build fast and robust
distance estimation for single-photon LiDAR
(Tachella et al 2019). RT3D achieved video rates of
50 Hz with processing times as low as 20 ms. K.
Drummond et al. studied the joint surface detection
problem of single-photon LiDAR data, with the and
depth estimation problem, proposing a 3D
reconstruction algorithm based on combined surface
detection and distance estimation (Drummond et al
2021). S. Plosz et al. introduced a highly robust, fast
single-photon LiDAR 3D reconstruction algorithm
and applied it to a pre-collected underwater dataset,
and in the environment up to 4.6AL, they achieved 10
milliseconds processing times (Plosz et al 2023).
However, these studies did not produce a combined
acquisition device and GPU into a comprehensive
underwater 3D reconstruction imaging system.
This paper presents the comprehensive
underwater 3D reconstruction system proposed by A.
Maccarone et al., which is based on the Si-CMOS
SPAD detector array and incorporates real-time
imaging capabilities with a workstation that is GPU-
equipped (Maccarone et al 2023). The discourse
further contrasts the performance of the RT3D
algorithm with the traditional cross-correlation
method and a recently developed method that
amalgamates surface detection and distance
estimation by Drummond et al. within this
experimental framework.
2 METHODS
This section elucidates the fundamental principles of
single-photon LiDAR, accompanied by a concise
overview of traditional cross-correlation method, the
RT3D algorithm and the recently developed
algorithms that amalgamate surface detection with
distance estimation (Ensemble Method). The RT3D
method is restricted to reconstructing one surface per
pixel at most to ensure fairness in comparison. This
Real-Time 3D Reconstruction Based on Single-Photon LiDAR for Underwater Environments
185

section will first introduce fundamental principles of
single-photon LiDAR, then observation model for the
three methods, finally principles of each method.
2.1 Fundamental Principles of
Single-Photon Lidar
The detection of a single photon by a single-photon
detector is not a deterministic event, but rather a
probabilistic one. This probabilistic event is termed
PDE, defined as the likelihood of triggering the
detector once a photon enters it. In practical
engineering applications, for photons of a fixed
wavelength, PDE is commonly denoted as
.
According to the research on laser echo
characteristics by Goodman et al., from the
perspective of regular distribution, for specular
targets, the number of echo photons reflected by the
laser pulse statistically follows a Poisson distribution
(Goodman 1965). For rough targets, however, the
echo photon events statistically adhere to a negative
binomial distribution. That is, for specular targets,
within the sampling time,
, (1)
where represents the energy carried by the echo
light signal reflected from the specular target, k
denotes the number of timing events triggered when
the external signal is input to TCSPC, and signifies
the probability density function of the detector
receiving the energy of the echo light signal, is the
frequency of the echo light signal, and is the Planck
constant.
For rough targets, within the sampling time,
, (2)
where represents the conditional probability of
generating timing events, is the gamma function,
denotes the degrees of freedom of speckle
presented in the echo light signal space, signifies
the average number of photoelectrons within the
sampling time. For photon counting lidar employing
TCSPC counting, , the expression for non-
specular targets will also converge to the form of a
Poisson distribution.
In summary, the Poisson response model of the
single-photon detector to photons within the time
interval
is
, (3)
, (4)
where
represents the energy of the echo signal,
denotes a single photon’s energy.
2.2 Observation Model
This paper establishes the observation model which is
based on the research of Legros et al. Think of a series
of temporal frames with pixels each, with the
data linked to every pixel in a frame made up of a
collection of reflected photon arrival timings (ToF).
It is assumed that in each frame things happen in static
scene, and the detection events caused by dark counts
and other sources are uniformly distributed. For a
known pixel, within a temporal window of width ,
the photon ToFs are
, where
.
At this point, the probability density can be written
down function as
(5)
where is the separation between the surface being
viewed and the reconstruction imaging system,
represents the median of the speed of light, denotes
the likelihood that the photons that were released
from the laser source, reflected off the target, and then
returned to the photon detector are related to the
recorded ToF values. It can alternatively be
understood as the pixel's signal-to-background ratio
(SBR), which is influenced by the background level
and target reflectance.
is the normalized
instrumental response function (IRF). The
background distribution is noted as
. The joint
probability distribution would be
(6)
2.3 Cross-Correlation
Cross-correlation is a common method used in
LIDAR ranging. The normalized waveform template
is denoted as
, and the measured waveform
signal is
. The cross-correlation value of
and
at the time slot k is
.
Initially, the shorter sequence
is zero-padded
on the left starting point to make the new sequence
have the same length as BB. The expression
for cross-correlation then becomes
, (7)
where represents the number of time slots
occupied by the measured waveform signal
.
DAML 2023 - International Conference on Data Analysis and Machine Learning
186

The time slot position corresponding to the
maximum value of the cross-correlation
is
the approximate location
of the target flight time ,
(8)
To obtain a more refined distance , this paper
calculates the difference between the centroid
of
the waveform
in the interval
and the centroid
of the normalized pulse
template
in the interval
for
the flight time values,
(9)
where
is the Full Width at Half Maximum
(FWHM) pulse width of the echo pulse.
The final distance estimation for the target,
denoted as , can be given by:
, (10)
where represents the speed of light.
3 RT3D
J. Tachella et al. introduced a computational
framework, referred to as the RT3D algorithm, which
is accomplished by combining highly scalable
computational techniques from the computer
graphics field with statistical models. The algorithm
uses photoactivated localization microscopy (PALM)
as the general structure while calculating steps for the
proximal gradient on background variables , blocks
of depth variables , and intensity variables . Every
update starts with a gradient step that looks like
equation (6) and is based on the log-likelihood term
. After that, there is a denoising step.
Precisely, using spheres as local primitives, the
algebraic point set surfaces (APSS) algorithm fits a
smooth continuous surface to the point set described
by the depth variable t in real-world coordinates. The
intensity variable in real-world coordinates uses a
manifold metric defined by the point cloud. All points
are processed in parallel, considering local
correlations only, and removing points with
intensities below a given threshold after the denoising
step. The proximal operator for the background
variable is replaced by a denoising technique based
on the fast Fourier transform.
3.1 Ensemble Method
The Ensemble Method, as described by Drummond et
al., is a Bayesian approach that allows for
simultaneous relative distance measurement and
surface recognition, quickly delivering conservative
prior uncertainty. The method depends on the
discretization of , which has a limited capacity to
accept values. It is possible to reframe the surface
detection problem, thanks to this discretization, as a
hypothesis testing problem. At the same time, the
method redefines the distance estimate problem as a
set estimation problem. As a result, this approach is
called the Ensemble Method. This approach yields
not only a 3D map and a detection map that shows the
presence or absence of a surface, but also an
uncertainty map that offers confidence indications for
the accuracy of the estimated distance, intensity, and
background profiles. Here, this paper uses the
algorithm with default parameters, such as a value of
for and an existence measurement
probability of
.
4 RESULTS
The detection objects used for the experiment are
illustrated in the figures. Figure 1(a) displays a brass
tube connector, while Fig. 1(b) and (c) showcase 3D
printed cylindrical objects mounted on a black
anodized aluminum breadboard, utilized for the three-
dimensional reconstruction experiments of stationary
targets (Maccarone et al 2023). The brass connector
has an inner diameter of 15mm and exhibits intricate
three-dimensional features. In contrast, the 3D-
printed rectangular objects have heights of 10mm,
20mm, and 30mm, respectively, and possess simpler
three-dimensional characteristics. Figure 1(d) and (e)
depict objects used for the three-dimensional
reconstruction experiments of moving targets. This
object is attached to a 2-meter-long rail via a
connector, enabling it to move within a three-
dimensional space. The experiment involved
submerging the transceiver system and the target
object in a 1.8-meter-deep water tank. The target was
placed at a distance of about 3 meters. In the
experiment, picosecond pulse laser source was used.
The central wavelength of the laser source is 532 nm,
great and the operating frequency is 20 MHz. The
measurements were conducted using the same
average optical power as specified in Table 1
(Maccarone et al 2023).
Real-Time 3D Reconstruction Based on Single-Photon LiDAR for Underwater Environments
187

Figure 1: Detection objects.
Table 1: Average optical power.
Attenuation lengths
Concentration of scattering agent
Average optical power
7.5 ± 0.4
0.0046%
52mW
7.1 ± 0.4
0.004%
47mW
5.5 ± 0.4
0.003%
32mW
3.6 ± 0.4
0.002%
22mW
<0.5
0%
0.96 mW
4.1 Static Scenes
Three-dimensional reconstruction of the brass pipe
connector was conducted in a static scene. When
employing the Ensemble Method, the threshold for
the surface detection existence probability is set at
. Points that have a probability of
posterior existence less than 0.5 are excluded, with
discarded points being treated as black pixels, setting
the pixel value to 0. As illustrated in Fig. 2, during the
three-dimensional reconstruction process
(Maccarone et al 2023), we aggregated 5000 binary
frames. All three 3D reconstruction methods
performed well when the attenuation length was less
than 0.5AL. However, as the attenuation length
increased, images obtained from all three methods
exhibited increased noise and surface loss. Among
them, the RT3D method showed less noise increment
but had more pronounced surface loss. This might be
attributed to the smoothing applied to the depth
variable and intensity variable during point cloud
denoising in the RT3D method. The Ensemble
Method exhibited a more significant increase in noise
compared to RT3D, as there is no denoising step in
the Ensemble Method. Overall, the Ensemble Method
showed fewer point losses at an attenuation length of
5.5AL and still maintained some denoising effect at
7.1AL. Hence, in static scenes, the Ensemble Method
offers superior overall performance in three-
dimensional reconstruction.
The Ensemble Method is also employed to
perform three-dimensional reconstruction on
cylindrical 3D printed objects. Histograms were gated
in time, focusing the target within a time window of
400 bins. The finished picture had a gate set between
0 and 50 mm. There are differences in how many
binary frames are used to aggregate the histograms.
The reconstruction results are shown in Fig. 3
(Maccarone et al 2023). Along the axis, the color
represents how far away it is from the transceiver. An
arbitrary origin close to the reference target position
was used. From the reconstruction results, it is
evident that when using the Ensemble Method, the
three-dimensional reconstruction's visual quality
declines with increasing attenuation length or
decreasing aggregated binary frame count, making
the identification of target features more challenging.
Figure 2: 3D profiles at different attenuation lengths using
different methods.
DAML 2023 - International Conference on Data Analysis and Machine Learning
188
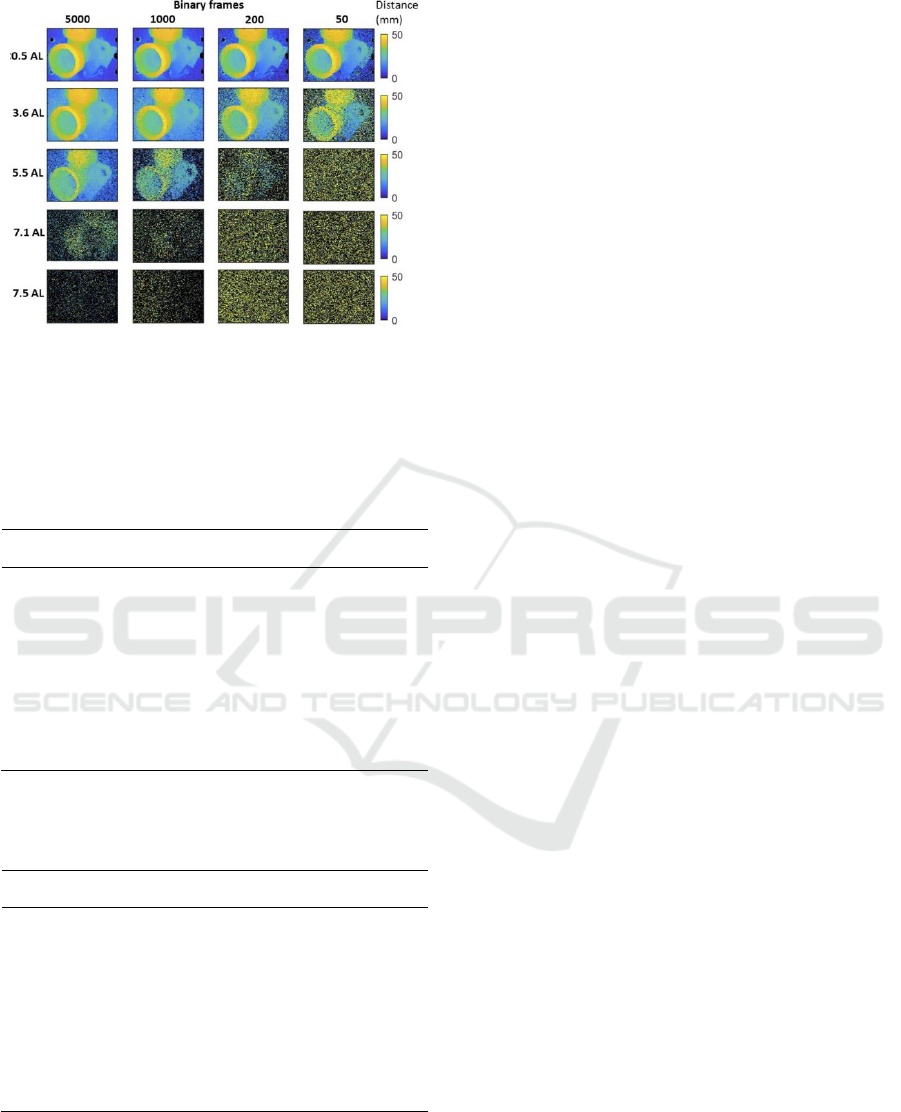
Figure 3: Brass pipe connector 3D profiles with different
numbers of binary frames using the ensemble method.
4.2 Dynamic Scenes
Table 2: Parallel orientation’s average processing time to
obtain a single image frame (ms) and standard deviation (in
brackets).
Attenuation
lengths
Cross-
Correlation
RT3D
Ensemble
Method
<0.5
1.15(0.11)
34.53(1.25)
32.76(1.21)
0.6
1.42(0.16)
35.34(1.20)
35.78(2.37)
1.4
1.27(0.19)
32.95(1.53)
33.72(1.92)
2.5
1.49(0.24)
34.53(1.38)
37.08(2.58)
3.6
1.20(0.20)
31.34(1.39)
33.05(1.77)
4.8
0.97(0.18)
28.95(1.18)
29.51(1.32)
5.5
0.97(0.13)
29.53(1.38)
30.92(0.91)
6.0
0.93(0.12)
28.54(2.28)
30.12(0.88)
6.6
0.93(0.12)
28.14(1.44)
29.47(0.81)
Table 3: Perpendicular orientation’s average processing
time to obtain a single image frame (ms) and standard
deviation (in brackets).
Attenuation
lengths
Cross-
Correlation
RT3D
Ensemble
Method
<0.5
1.27(0.19)
34.67(1.98)
35.23(2.44)
0.6
1.54(0.19)
36.17(2.80)
37.19(3.11)
1.4
1.35(0.20)
34.83(1.23)
34.51(3.15)
2.5
1.65(0.27)
34.86(1.39)
38.56(2.98)
3.6
1.30(0.15)
32.36(1.74)
34.22(2.28)
4.8
1.02(0.11)
30.74(1.28)
30.07(1.19)
5.5
0.96(0.09)
29.55(1.12)
30.7(0.98)
6.0
0.94(0.09)
28.30(2.77)
20.54(0.9)
6.6
0.91(0.09)
29.46(4.34)
29.7(0.9)
To investigate the characteristics of real-time online
three-dimensional reconstruction in dynamic scenes,
The T-shaped metal connection made of aluminum is
depicted in Fig. 1(d)(e), and it is chosen as the subject
of study. The term "parallel direction" refers to the
axial direction of the connector's connection hole,
which is parallel to the line of sight of the system.
Displaying the connector's entire length when
oriented perpendicular to the parallel direction, which
is called the vertical direction. In the dynamic scene,
the experiment aggregated 50 binary frames to
generate histograms. Gates were used to control the
histograms, focusing the target within a time window
of 400 bins. Each pixel was processed in parallel
using a GPU to ensure the real-time nature of the 3D
reconstruction.
Experiments were conducted using the Cross-
Correlation, Ensemble Method, and RT3D methods,
with the results presented in Tables 2 and 3
(Maccarone et al 2023). When employing the
Ensemble Method, a discrete set of w values, ,
was chosen. The code was constructed in a modular
fashion and delegated to three separate GPU cores for
processing. The first step involved obtaining the
posterior probability distribution values, followed by
normalization, and finally, the results were derived.
The processing time average for a single image
frame obtained in the parallel orientation is shown in
Table 2, and the processing time average for a single
image frame obtained in the vertical orientation is
shown in Table 3. The standard deviations for
different attenuation lengths are provided in
parentheses. As evident from the tables, the
processing time for each method decreases with the
increase in attenuation length. The cross-correlation
method has a significantly greater processing speed
than the other two methods. The ensemble method's
processing time is slightly slower than that of the
RT3D method. Thus, when the attenuation length
grows, photons are scattered more widely, which
leads to a decrease in the number of returned photons.
Consequently, the generated histograms are sparser,
leading to reduced processing times.
The results of three-dimensional reconstruction in
clear water and target systems with different
attenuation lengths are presented in Fig. 4
(Maccarone et al 2023). When the attenuation length
exceeds 5.5AL, the target becomes unrecognizable,
but clusters of points can still be obtained. This
indicates that these methods cannot perform three-
dimensional reconstruction in environments with
high scattering levels, but they can still track targets.
On the other hand, as is shown in Fig. 5 (Maccarone
et al 2023), the Cross-Correlation method can be used
in low-scattering environments, but it is unable to
recognize or detect targets in high-scattering
environments.
a
Real-Time 3D Reconstruction Based on Single-Photon LiDAR for Underwater Environments
189
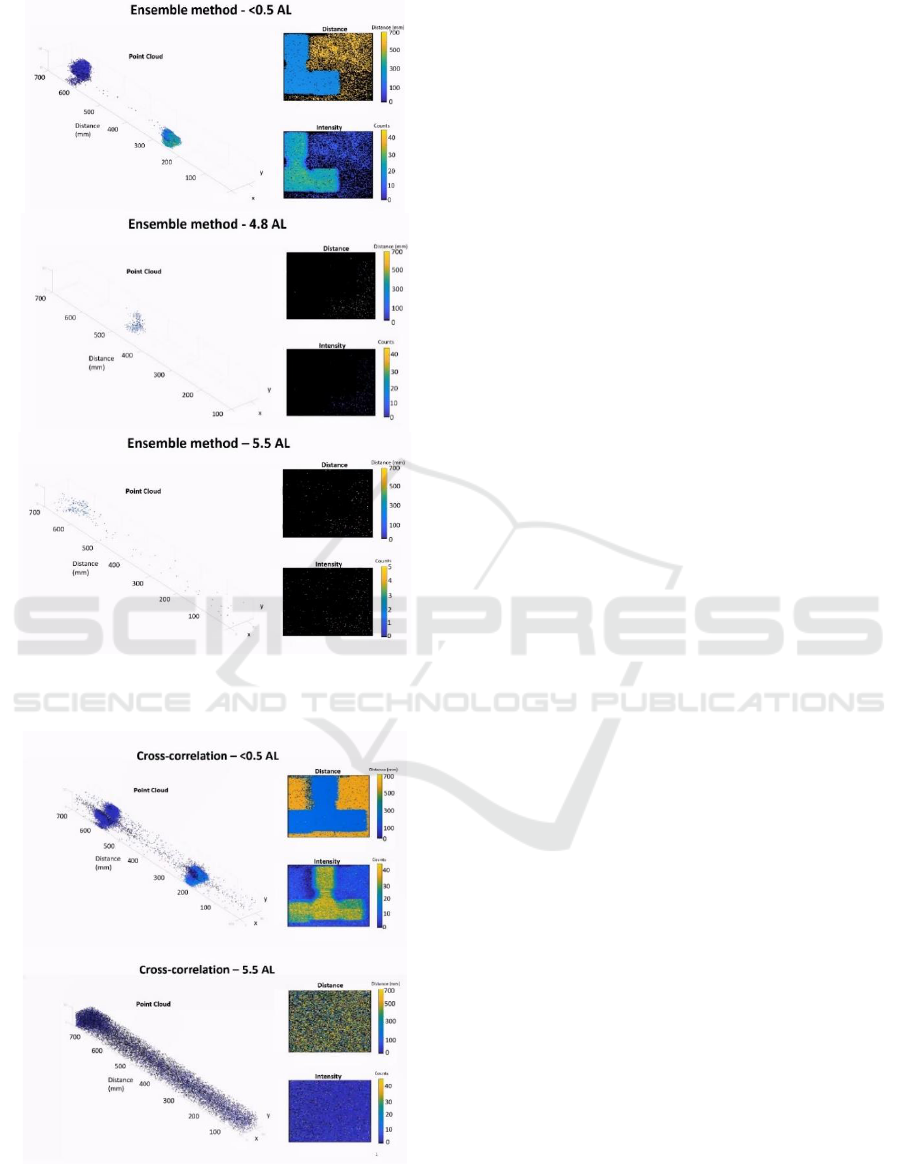
Figure 4: 3D real-time profiles at different attenuation
lengths using ensemble method.
Figure 5: 3D real-time profiles at different attenuation
lengths using cross-correlation method.
5 CONCLUSION
The article presents real-time 3D reconstruction
technology underwater based on single-photon
LiDAR, comparing the performance of the Ensemble
Method, RT3D, and the traditional cross-correlation
method in waters of varying turbidity, as proposed by
A. Maccarone et al. The experimental results show
that in static scenes, all three 3D reconstruction
methods perform well in water with low attenuation
lengths, but as attenuation increases, they all exhibit
more noise and surface loss. Among them, the cross-
correlation method performs the worst; the RT3D
method has less noise increase but more obvious
surface loss; the Ensemble Method loses fewer points
at 5.5AL and still has some noise reduction effect at
7.1AL, making it the best performer among the three
methods. The cross-correlation approach was found
to be much faster than the other two ways in dynamic
circumstances, with the Ensemble approach being
marginally slower than the RT3D method. All three
methods' processing times reduced as the attenuation
length rose. When the attenuation length exceeds
5.5AL, none of the methods can perform 3D
reconstruction, but the RT3D method and the
Ensemble Method can still obtain clusters of points.
REFERENCES
K. Ingale, “Real-time 3D reconstruction techniques applied
in dynamic scenes: A systematic literature review,”
Computer Science Review 39, 100338 (2021).
J. Wollborn, A. Schule, R. D. Sheu, D. C. Shook and C. B.
Nyman, “Real-Time multiplanar reconstruction
imaging using 3-dimensional transesophageal
echocardiography in structural heart interventions,”
Journal of Cardiothoracic and Vascular Anesthesia,
37(4), 570-581 (2023).
X. Wen, J Wang, G. Zhang and L. Niu, “Three-dimensional
morphology and size measurement of high-
temperature metal components based on machine
vision technology: a review,” Sensors, 21(14), 4680
(2021).
W. Wang, B. Joshi, N. Burgdorfer, K. Batsos, A. Q. Li, P.
Mordohai and I. M. Rekleitis, “Real-Time Dense 3D
Mapping of Underwater Environments”, 2023 IEEE
International Conference on Robotics and
Automation, 5184-5191 (2023).
S. Williams and I. Mahon, “Simultaneous localisation and
mapping on the great barrier reef”, IEEE International
Conference on Robotics and Automation, 2, 1771-
1776 (2004).
M. Gary, N. Fairfield, W. C. Stone, D. Wettergreen, G,
Kantor and J. M. Sharp, “3D Mapping and
Characterization of Sistema Zacatón from DEPTHX
b
c
a
b
DAML 2023 - International Conference on Data Analysis and Machine Learning
190

(DE ep P hreatic TH ermal e X plorer),” Sinkholes
and the Engineering and Environmental Impacts of
Karst, 202-212 (2008).
F. Menna, P. Agrafiotis and A. Georgopoulos, “State of the
art and applications in archaeological underwater 3D
recording and mapping,” Journal of Cultural
Heritage, 33, 231-248 (2018).
Maccarone, A. McCarthy, X. Ren, R. E. Warbutrton, A. M.
Wallace, J. Moffat, Y, Petillot and G. S. Buller,
“Underwater depth imaging using time-correlated
single-photon counting, “ Optics express, 23(26),
33911-33926 (2015).
Maccarone, F. M. Della Rocca, A. McCarthy, A. McCarthy,
R. Henderson and G. S. Buller, “Three-dimensional
imaging of stationary and moving targets in turbid
underwater environments using a single-photon
detector array,” Optics express, 27(20), 28437-28456
(2019).
J. Tachella, Y. Altmann, N. Mellado, A. McCarthy, R.
Tobin, G. S. Buller, J. Y. Tourneret and S.
McLaughlin, “Real-time 3D reconstruction from
single-photon lidar data using plug-and-play point
cloud denoisers, “Nature communications, 10(1),
4984 (2019).
K. Drummond, S. McLaughlin, Y. Altmann, A.
Pawlikowska and R. Lamb, “Joint surface detection
and depth estimation from single-photon Lidar data
using ensemble estimators,” 2021 Sensor Signal
Processing for Defence Conference (SSPD), pp. 1-5
(2021).
S. Plosz, A. Maccarone, S. McLaughlin, G. S. Buller and
A. Halimi, “Real-Time Reconstruction of 3D Videos
From Single-Photon LiDaR Data in the Presence of
Obscurants,” IEEE Transactions on Computational
Imaging, vol. 9, pp. 106-119 (2023).
A. Maccarone, K. Drummond, A. McCarthy and U. K. S.
Teinlehner, “Submerged single-photon LiDAR
imaging sensor used for real-time 3D scene
reconstruction in scattering underwater
environments,” Optics Express, 31(10), 16690-16708
(2023).
J. W. Goodman, “Some effects of target-induced
scintillation on optical radar performance,”
Proceedings of the IEEE, 53(11), 1688-1700 (1965).
Q. Legros, J. Tachella, R. Tobin, A. McMarthy, S.
Meignen, G. S. Buller, Y. Altmann, S, McLayghlin
and M. E. Davies, “Robust 3d reconstruction of
dynamic scenes from single-photon lidar using beta-
divergences,” IEEE Transactions on Image
Processing, 30, 1716-1727 (2020).
Real-Time 3D Reconstruction Based on Single-Photon LiDAR for Underwater Environments
191
