
Graph Convolutional Networks for Image Classification: Comparing
Approaches for Building Graphs from Images
J
´
ulia Pelayo Rodrigues
a
and Joel Lu
´
ıs Carbonera
b
Institute of Informatics, Federal University of Rio Grande do Sul, Porto Alegre, Brazil
Keywords:
Graph Neural Networks, Image Classification, Superpixels, Graph Convolutional Networks.
Abstract:
Graph Neural Networks (GNNs) is an approach that allows applying deep learning techniques to non-euclidean
data such as graphs and manifolds. Over the past few years, graph convolutional networks (GCNs), a specific
kind of GNN, have been applied to image classification problems. In order to apply this approach to image
classification tasks, images should be represented as graphs. This process usually involves over-segmenting
images in non-regular regions called superpixels. Thus, superpixels are mapped to graph nodes that are char-
acterized by features representing the superpixel information and are connected to other nodes. However,
there are many ways of transforming images into graphs. This paper focuses on the use of graph convolutional
networks in image classification problems for images over-segmented into superpixels. We systematically
evaluate the impact of different approaches for representing images as graphs in the performance achieved by
a GCN model. Namely, we analyze the degree of segmentation, the set of features chosen to represent each su-
perpixel as a node, and the method for building the edges between nodes. We concluded that the performance
is positively impacted when increasing the number of nodes, considering rich sets of features, and considering
only connections between similar regions in the resulting graph.
1 INTRODUCTION
Graph Neural Networks (GNNs) (Scarselli et al.,
2009)) is an approach that generalizes neural net-
works, allowing them to deal with non-euclidean data
such as graphs. This capability of dealing with graphs
as inputs makes it possible to apply deep learning ap-
proaches to a vast set of problems whose data can
be modeled as graphs. Since they were proposed,
GNNs have been applied in different areas (Wu et al.,
2020), such as Bioinformatics (Zhang et al., 2021),
Particle Physics (Shlomi et al., 2020), Neuroscience
(Bessadok et al., 2022), natural language processing
(Wu et al., 2023), material science and Chemistry
(Reiser et al., 2022), Computer vision (Chen et al.,
2022; Todescato et al., 2024), etc.
In the last few years, several studies have inves-
tigated how to apply GNNs for image classification
(Hong et al., 2020; Chen et al., 2020; Zhang et al.,
2023; Du et al., 2023; Tang et al., 2022). Most of
these studies are based on a specific type of GNN
called graph convolutional network (GCN) (Kipf and
Welling, 2017), which can be understood as a gener-
a
https://orcid.org/0009-0003-0821-4281
b
https://orcid.org/0000-0002-4499-3601
alization of convolutional neural networks to graph-
structured data.
In order to apply GNNs for classifying images,
it is necessary to represent the image information as
a graph. Typically, these approaches involve over-
segmenting images into non-regular regions called su-
perpixels (Defferrard et al., 2016; Monti et al., 2016)
that are mapped to nodes in a graph. However, in
this approach, there are different ways of building the
resulting graph, depending on choices made by the
designer on different aspects. For example, the im-
ages can be segmented in different degrees, resulting
in different numbers of nodes in the graph and in dif-
ferent densities of pixels per node. Besides that, there
are different approaches for defining the edges among
the nodes that represent superpixels, such as adopt-
ing fully connected graphs (Monti et al., 2016), K-
Nearest Neighbors, region adjacency graphs (Avelar
et al., 2020a), dynamic approaches (Linh and Youn,
2021), etc. Furthermore, there are different ways of
assigning features to nodes in order to represent the
superpixels’ features in the original image.
However, as far as we are aware, the literature
does not provide any systematic comparison of how
different ways of building graphs impact the per-
Rodrigues, J. and Carbonera, J.
Graph Convolutional Networks for Image Classification: Comparing Approaches for Building Graphs from Images.
DOI: 10.5220/0012263200003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 437-446
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
437

formance achieved by GCNs in image classification
tasks. Such systematic evaluation would be a valuable
reference for supporting the most effective choices
when designing models in this context.
In this paper, we focus on using Graph Convo-
lutional Networks (Kipf and Welling, 2017) (GCNs)
for the classification of superpixel segmented images
using the SLIC (Achanta et al., 2012) method in its
adaptive (SLICO) variant. Our objective is to system-
atically evaluate the impact of the following graph-
building choices on the performance of a simple GCN
model: (I) the degree of segmentation (that defines the
number of nodes in the resulting graph); (II) the selec-
tion of features for characterizing each node, and rep-
resenting the superpixels’ information; and (III) the
method for defining edges between node pairs in the
resulting graph.
We have found that the performance achievable by
the GCN model is positively impacted by choosing
rich representative feature sets, increasing the num-
ber of superpixels per image – although the positive
impact grows smaller as the number of pixels per su-
perpixel approaches one –, and by building neighbor-
hoods between nodes that encompass only similar re-
gions (that is, considering descriptive features in the
calculation of the distance between nodes and limit-
ing the maximum degree).
The remainder of this paper is structured as fol-
lows. In Section 2 we discuss the related work. In
Section 3 we present our experiments and discuss our
results. Finally, Section 4 presents the conclusions.
2 RELATED WORKS
Errica et al. (Errica et al., 2022) have compared dif-
ferent GNN architectures’ (including GCNs) perfor-
mance in the task of graph classification, drawing
attention to the reproducibility problems present in
the literature. They propose a rigorous method for
model evaluation and comparison – highlighting the
importance of using the same features and number of
nodes – and a standardized and reproducible experi-
mental setting. They are also able to establish, using a
structure-agnostic baseline model, that not always are
GNNs able to take advantage of the structural infor-
mation in graphs.
Shchur et al. (Shchur et al., 2019) also point
out limitations in the empirical evaluation process of
GNN models, focusing on node classification tasks.
They discuss the effects of train/test/validation dataset
splits on performance, finding that with the same hy-
perparameter selection and training procedures sim-
ple GCNs may be able to outperform more sophisti-
cated models.
Xu et al. (Xu et al., 2019) provide a theoretical
analysis of the representative power of different GNN
models – in addition to proposing their own model,
the Graph Isomorphism Network (GIN) – and exper-
imentally compare them using different graph classi-
fication datasets, showing that, in most cases, more
representative power implies greater accuracy.
Monti et al. (Monti et al., 2016) introduced the
MoNet framework for generalizing CNN architec-
tures to graphs and manifolds. They also proposed a
model that was applied to, among other tasks, image
classification, using both uniform grids and SLIC su-
perpixels as segmentation methods. In the superpixel
approach the graphs were fully connected, while in
the grid approach, each node was connected to its im-
mediate and diagonal neighbors, with grids yielding
better results. No references are made regarding the
method used for building node features.
Avelar et al. (Avelar et al., 2020b) used Graph At-
tention Network (GAT) for superpixel image classifi-
cation. Their method consists of segmenting the input
image into superpixels using the SLIC method, ex-
tracting features (namely average color and centroid,
although other options are also suggested) from them,
and building region adjacency graphs. The resulting
graph is then fed into the GAT. They concluded that
GAT networks are not able to achieve the same per-
formance achieved by more sophisticated models.
Long et al (Long et al., 2021) proposed the Hi-
erarchical GNN (HGNN) with multiple GAT layers,
aggregating each layer’s output. The method was ap-
plied to superpixel image classification. The graph
was built with SLIC superpixels as nodes, with aver-
age color and centroid as features. The edges were
built with a K-Nearest Neighbors approach, using as
the distance metric the average distance of each color
channel and spatial dimension.
Linh et al. (Linh and Youn, 2021) proposed
the Dynamic Superpixel Cloud GCN (DISCO-GCN)
model, using GCN layers with edges generated dy-
namically before each layer. They also use SLIC su-
perpixel segmentation, building features using only
color information, although they also suggest the pos-
sibility of spatial features (such as the centroid).
As far as we are aware, the literature does not
provide any systematic comparison of how differ-
ent ways of building graphs impact the performance
achieved by GCNs in image classification tasks.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
438

3 EXPERIMENTS
In this Section, we systematically analyze the impacts
on the performance of an image-classification GCN
model of different methods for building
1
graphs that
represent images. We evaluated three dimensions of
the graph-building process: node features, number of
nodes, and edge-building method.
In each experiment, the following datasets were
used: MNIST (Lecun et al., 1998), Fashion-MNIST
(Xiao et al., 2017), CIFAR-10 (Krizhevsky, ), CIFAR-
100 (Krizhevsky, ), and STL-10 (Coates et al., ). All
datasets are balanced (with the same number of im-
ages for each class). In each dataset, all images have
a homogeneous size. Other characteristics of the se-
lected datasets are described in table 1.
For extracting superpixels from images, we
adopted the SLIC method (Achanta et al., 2012) in its
adaptive (SLICO
2
) variant. The difference between
SLIC and SLICO is in the input parameters: SLIC re-
quires the user to input both the approximate number
of superpixels to create and the compactness factor,
and SLICO only needs the number of superpixels. In
this context, compactness is a measure of shape cal-
culated as a ratio of the perimeter to the area. Thus,
SLICO adaptively changes the compactness factor
depending on the texture of the region, resulting in
regularly shaped superpixels regardless of the tex-
ture (Yassine et al., 2018). Several other approaches
for extracting superpixels are also available, such as
SEEDS (Van den Bergh et al., 2015), SNIC (Achanta
and Susstrunk, 2017) and ETPS (Yao et al., 2015).
However, SLIC is preferred among most other state-
of-the-art methods (Stutz et al., 2018) and is readily
available in both of its considered variants. Besides
requiring just a single parameter, SLICO also tends
to produce more stable segmentation results, with re-
spect to the effective number of pixels compared to
n. It is important to note that the implementation of
the SLICO method adopted in this work only admits
superpixels composed of a minimum of 2 pixels, lim-
iting thus the number of nodes that can be generated.
It is also noteworthy that, given the n parameter that
defines the desired number of superpixels to be ex-
tracted from the image, it is not guaranteed that the
SLICO method will produce exactly n superpixels.
For training the GCN model, the Adam optimizer
was used, with a fixed learning rate of 0.0001, and
1
The source code developed for building graphs from
images, can be found in https://github.com/BDI-UFRGS/
superpixel-graphs
2
We adopted the OpenCV implementation of SLICO,
whose documentation can be found in https://docs.opencv.
org/3.4/df/d6c/group ximgproc superpixel.html
cross entropy loss. We adopted a stratified 5-fold
cross-validation procedure, and every result reported
henceforth is the average of the five folds. In each
fold, one-fifth of the dataset is used as test data, and,
of the remaining 80%, 10% is used for validation
and 90% training, respecting class distributions. We
adopted accuracy and macro f1-measure as perfor-
mance metrics. There are 100 training epochs, and
the final model is the one with the greatest validation
f1-measure.
In the following sections, we present the GCN
model used in our experiments and, after, we describe
each experiment and its results.
3.1 The Model
The model used in the following experiments con-
sists of a group of sequential GCN layers, each fol-
lowed by a ReLU activation layer. This sequence of
layers is followed by a global mean pooling and a
global max pooling operation, both resulting in vec-
tors r ∈ R
|F|
, where |F| is the number of features that
characterize each node. The global max pooling op-
eration computes the feature-wise maximum values
across the nodes of the graph, and the global mean
pooling computes the feature-wise mean. The two
vectors resulting from these operations are concate-
nated and passed through a fully connected layer with
linear activation, with the output given by the follow-
ing softmax module. The model is illustrated in Fig.
1.
To determine the number of GCN layers for the
model used in our experiments, we evaluated the
impact that different quantities have on the model’s
performance considering a fixed graph generation
method. For each dataset, we considered models with
1, 2, 3, and 4 GCN layers. We used region adjacency
graphs (where nodes are connected considering all the
adjacent neighbors of each superpixel in the original
image) with approximately 75 nodes and average and
standard deviation of color, geometric centroid, and
standard deviation from centroid as features.
As can be seen in Figure 2, except for MNIST –
the simplest dataset in the selection – raising the num-
ber of layers to four, at best, has little effect on the
performance when compared with the three-layered
model and, at worst, decreases the performance (as
is the case of CIFAR-10 and STL-10). However, in
most datasets, raising the number of layers from two
to three results in performance gains. Based on these
results, we used three sequential GCN layers for the
experiments described in the following sections.
Graph Convolutional Networks for Image Classification: Comparing Approaches for Building Graphs from Images
439
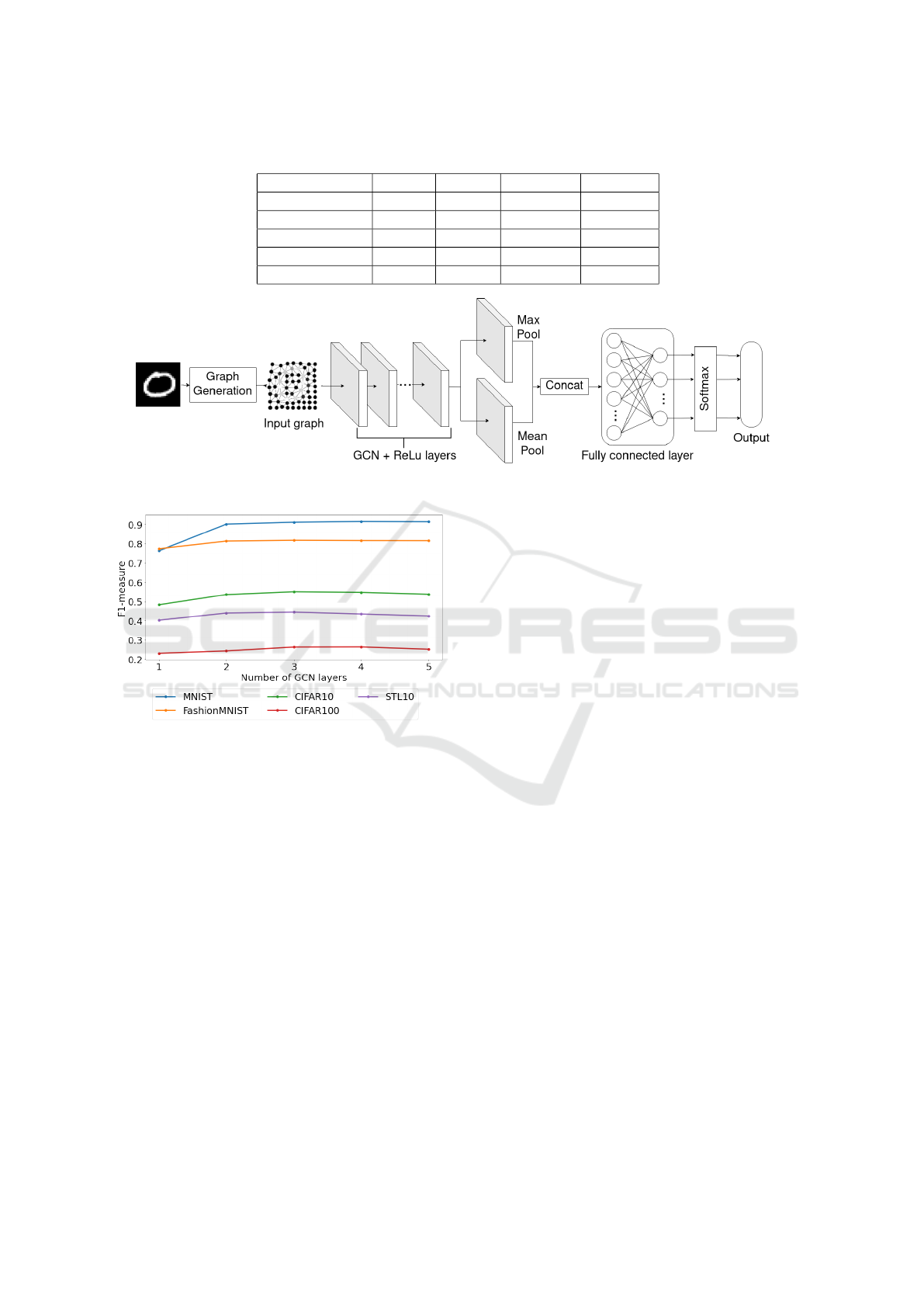
Table 1: Dataset characteristics.
Dataset Images Classes Color Area (px)
MNIST 70000 10 Greyscale 28x28
FashionMNIST 70000 10 Greyscale 28x28
CIFAR10 60000 10 Color 32x32
CIFAR100 60000 100 Color 32x32
STL10 13000 10 Color 96x96
Figure 1: Diagram representing the model’s architecture.
Figure 2: Test F1-measure with macro average w.r.t. the
number of GCN layers.
3.2 Evaluating Node Features
In our first experiment, we evaluated how node-
feature selection impacts model performance. In or-
der to do that, we considered the following possible
features, all extracted from spatial and color (RGB or
greyscale, depending on the particular dataset’s char-
acteristics) information of the pixels that compose
each superpixel extracted from the original image by
the SLICO method:
• Geometric centroid: average 2D pixel position in
the original image;
• Standard deviation of pixel positions from the
centroid;
• Number of pixels: total number of pixels, or pixel
density, in the superpixel;
• Average RGB color: average R, G, and B values
in colorful datasets or average greyscale value in
greyscale datasets;
• Standard deviation from average color: standard
deviation of R, G, and B mean values in color
datasets or of greyscale mean value in greyscale
datasets;
• Average HSV color: only used in color datasets
(i.e. CIFAR-10, CIFAR-100, and STL-10), aver-
age values in HSV color space;
• Standard deviation from average HSV color: only
used in colorful datasets, the standard deviation of
values in HSV color space.
Our method consisted of selecting an initial base-
line feature vector containing only one feature and
then progressively expanding the baseline by adding
new features, analyzing how each increment impacted
the model’s performance. We selected as the baseline
feature the average color (RGB in colorful datasets,
greyscale otherwise), which is the feature most com-
monly used in the literature, to the best of our knowl-
edge. That is a one-dimensional feature vector in
greyscale datasets and a three-dimensional vector in
colorful datasets. The order in which the remaining
features were added was, from first to last: geometric
centroid, standard deviation of color, standard devia-
tion of centroid, and number of pixels. For colorful
datasets were also added, in that order: average HSV
color, and standard deviation of HSV color.
In this experiment, we used the SLICO algorithm
for segmentation, with parameter n, the desired num-
ber of superpixels, fixed at 75. For defining the edges
of the resulting graph, we adopted region adjacency
graphs.
Figure 3 shows the evolution of the macro f1-
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
440
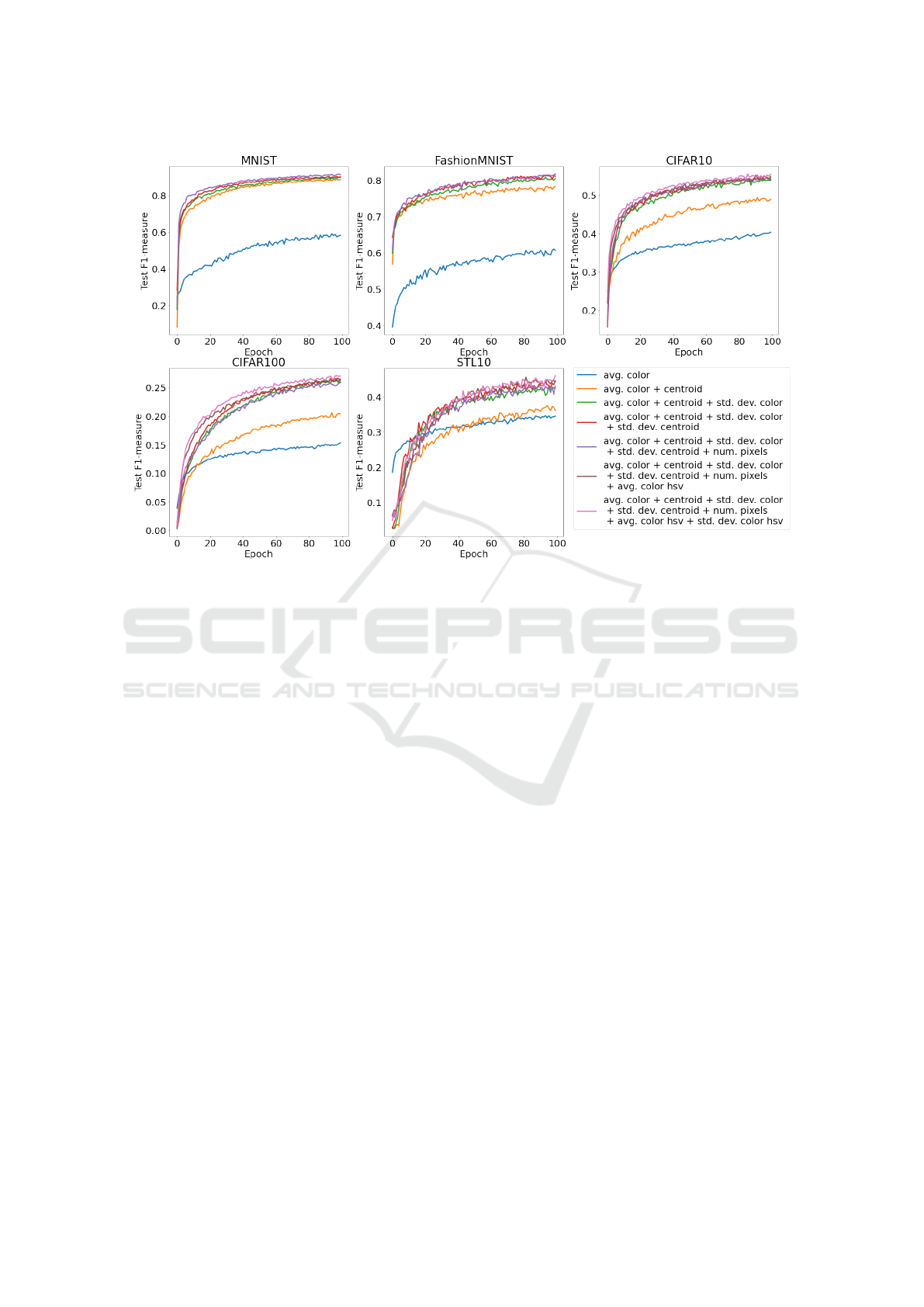
Figure 3: Test F1-measure with macro average along training process for each dataset in the experiment.
measure of the test set over the 100 epochs and Ta-
ble 2 presents the final accuracy and f1-measure on
the test set achieved by the model for each dataset
and feature added to the progressively built baseline
feature vector. Our results suggest that the most sig-
nificant performance gain is obtained when adding
to the baseline RGB/greyscale color information the
spatial information from the centroid. But, also, a
consistent improvement is seen when adding the stan-
dard deviation of RGB/greyscale color. The inclusion
of the standard deviation from the centroid resulted
in performance improvements, especially in MNIST,
FashionMNIST, and STL-10 datasets. Our results
also suggest that the performance can be improved by
adding average color and standard deviation values in
different color spaces to compensate for the loss of in-
formation that comes with the segmentation process.
3.3 Evaluating the Number of Nodes
Another important choice when building the image
graph is determining the number of nodes, which, in
this case, and in most superpixel approaches, is di-
rectly related to the number of superpixels generated
in the segmentation process. That corresponds to, in
this particular work, choosing the value of the de-
sired number of superpixels parameter – henceforth
referred to as n – in the SLIC algorithm variations.
Here, once more, region adjacency graphs were
used and the node features selected, as described in
the previous subsection, were: average color, geo-
metric centroid, standard deviation of RGB/greyscale
color, and standard deviation of centroid (the best-
performing features that are also applicable to all
datasets).
Our method consisted of training and testing the
model with the graphs generated for each of the fol-
lowing values for n: 10, 20, 50, 100, 200, and 400.
This process was applied for each considered dataset.
Figure 5 shows examples of graphs generated using
each of the n valuations.
We note that the performance gain as a function
of the average number of nodes observed in the ex-
periments, as shown in Fig. 4, tends to follow a log-
arithmic curve, increasing less as the number of su-
perpixels approaches the total number of pixels in the
image. Meanwhile, the number of edges that are gen-
erated for each graph, as well as the total number of
features stored, grows linearly with respect to the total
number of nodes, affecting thus the memory require-
ments of the model and its training time.
3.4 Evaluating Edge Building Methods
In this experiment, we analyze different approaches
for building the graph’s edges and their impact on
the model’s performance. Three different methods –
the most common in the literature, to the best of our
Graph Convolutional Networks for Image Classification: Comparing Approaches for Building Graphs from Images
441
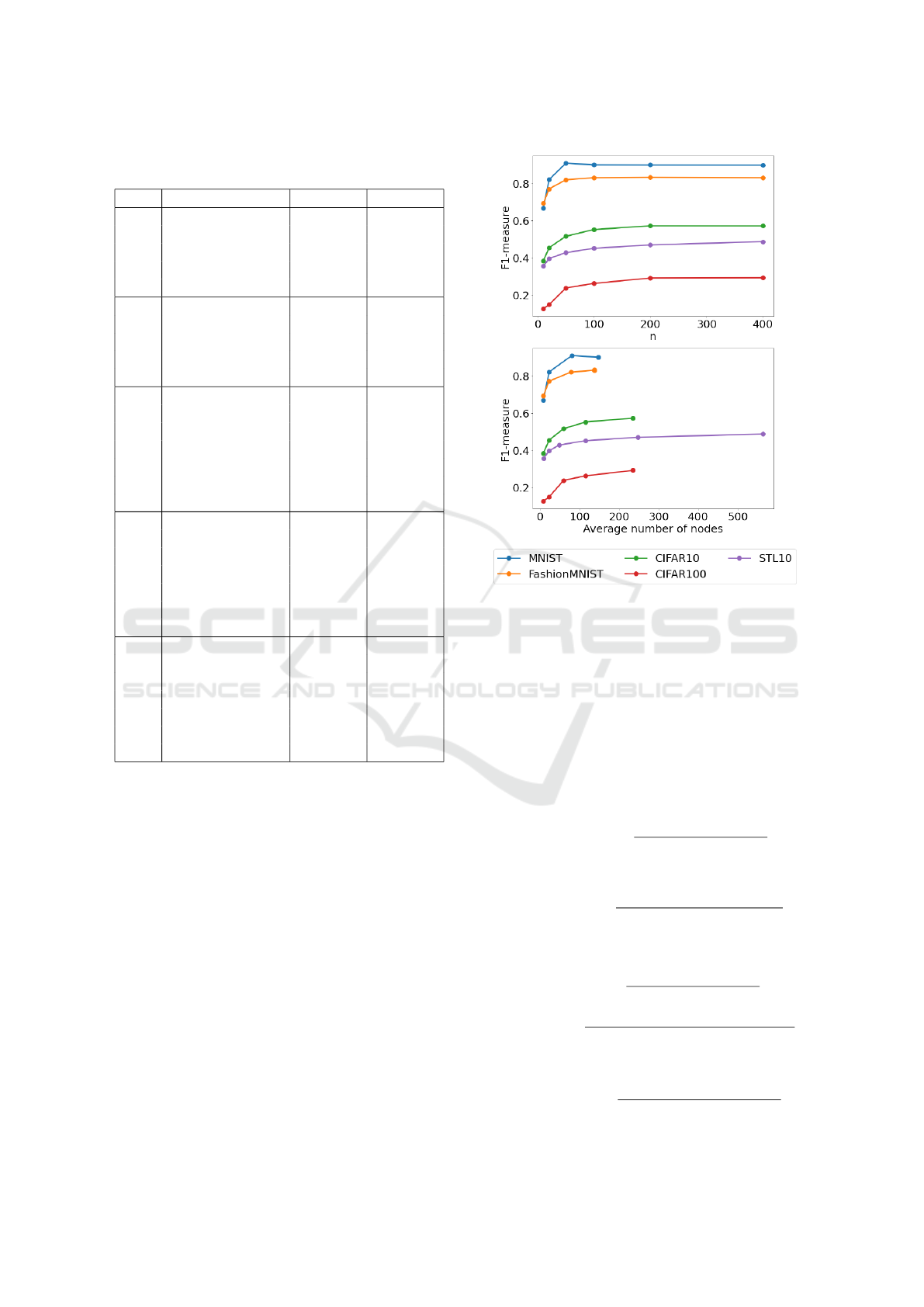
Table 2: Test accuracy and macro F1-measure in % for each
feature-set and dataset.
DS Feature Acc. F1
MNIST
Avg. color 60.8±1.4 59.5±1.5
Centroid 89.2±0.4 89.1±0.4
Std. dev. color 90.3±0.3 90.2±0.3
Std. dev. centroid 91.2±0.3 91.2±0.3
Num. of pixels 91.0±0.6 90.9±0.6
Fashion-
MNIST
Avg. color 61.4±1.0 61.2±1.4
Centroid 78.9±0.5 78.6±0.6
Std. dev. color 80.9±0.3 80.6±0.3
Std. dev. centroid 81.7±0.4 81.4±0.4
Num. of pixels 81.9±0.4 81.8±0.4
CIFAR10
Avg. color 41.2±0.9 40.7±0.8
Centroid 50.0±0.6 49.5±0.5
Std. dev. color 54.9±0.2 54.5±0.3
Std. dev. centroid 55.0±0.6 54.6±0.6
Num. of pixels 55.6±0.3 55.2±0.4
Avg. HSV 55.4±0.4 55.0±0.6
Std. dev. HSV 55.4±0.5 54.9±0.5
CIFAR100
Avg. color 16.9±0.4 15.1±0.5
Centroid 22.1±0.5 20.6±0.6
Std. dev. color 27.7±0.6 26.3±0.8
Std. dev. centroid 27.7±1.1 26.4±1.3
Num. of pixels 27.7±1.1 26.4±1.3
Avg. HSV 28.1±0.9 26.8±1.0
Std. dev. HSV 28.2±1.2 27.2±1.1
STL10
Avg. color 35.6±0.3 34.6±0.5
Centroid 38.6±0.5 37.4±0.3
Std. dev. color 43.5±2.0 42.9±1.6
Std. dev. centroid 44.4±0.6 43.5±0.8
Num. of pixels 44.7±1.0 44.0±1.0
Avg. HSV 46.8±0.5 46.5±0.3
Std. dev. HSV 47.1±0.7 46.4±0.8
knowledge – were chosen for this experiment:
• Region adjacency graphs (RAGs);
• K-Nearest Neighbors with spatial distance (KNN-
Spatial);
• K-Nearest Neighbors with combined spatial and
color distances (KNN-Combined).
In the region adjacency graphs, there is an edge
between two nodes if they correspond to directly ad-
jacent superpixels. That is, there is at least one pair
of pixels i and j, with coordinates (x
i
, y
i
) and (x
j
, y
j
),
each one belonging to each superpixel, that satisfy the
following condition:
|x
i
− x
j
| + |y
i
− y
j
| = 1 (1)
The KNN-Spatial and KNN-Combined methods
attribute edges between each node and its k nearest
neighbors, not including the node itself. The differ-
ence between the two lies in the distance function:
Figure 4: Test F1-measure with macro average for, from
top to bottom, the value given as the desired number of
superpixels n, and the actual average number of superpix-
els/nodes produced by the SLICO algorithm.
KNN-Spatial compares two superpixels’ geometric
centroids while KNN-Combined combines the spatial
distance with the distance between average color val-
ues.
For two superpixels s
i
and s
j
, with geometric cen-
troids (x
i
, y
i
) and (x
j
, y
j
), and average color values
(r
i
, g
i
, b
i
) and (r
j
, g
j
, b
j
) for RGB color datasets and
l
i
and l
j
for greyscale datasets, the spatial distance be-
tween s
i
and s
j
is given by:
d
spatial
(s
i
, s
j
) =
q
(x
i
− x
j
)
2
+ (y
i
− y
j
)
2
(2)
The combined color and spatial distance is defined
as, for color datasets:
d
combined
(s
i
, s
j
) =
q
d
′
spatial
(s
i
, s
j
) + d
′
color
(s
i
, s
j
) (3)
Where d
′
spatial
(s
i
, s
j
) and d
′
color
(s
i
, s
j
) are:
d
′
spatial
(s
i
, s
j
) =
(x
i
− x
j
)
2
+ (y
i
− y
j
)
2
2
(4)
d
′
color
(s
i
, s
j
) =
(r
i
− r
j
)
2
+ (g
i
− g
j
)
2
+ (b
i
− b
j
)
2
3
(5)
As for greyscale datasets, the combined color and spa-
tial distance is given by:
d
combined
(s
i
, s
j
) =
q
d
′
spatial
(s
i
, s
j
) + d
′
grey
(s
i
, s
j
) (6)
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
442
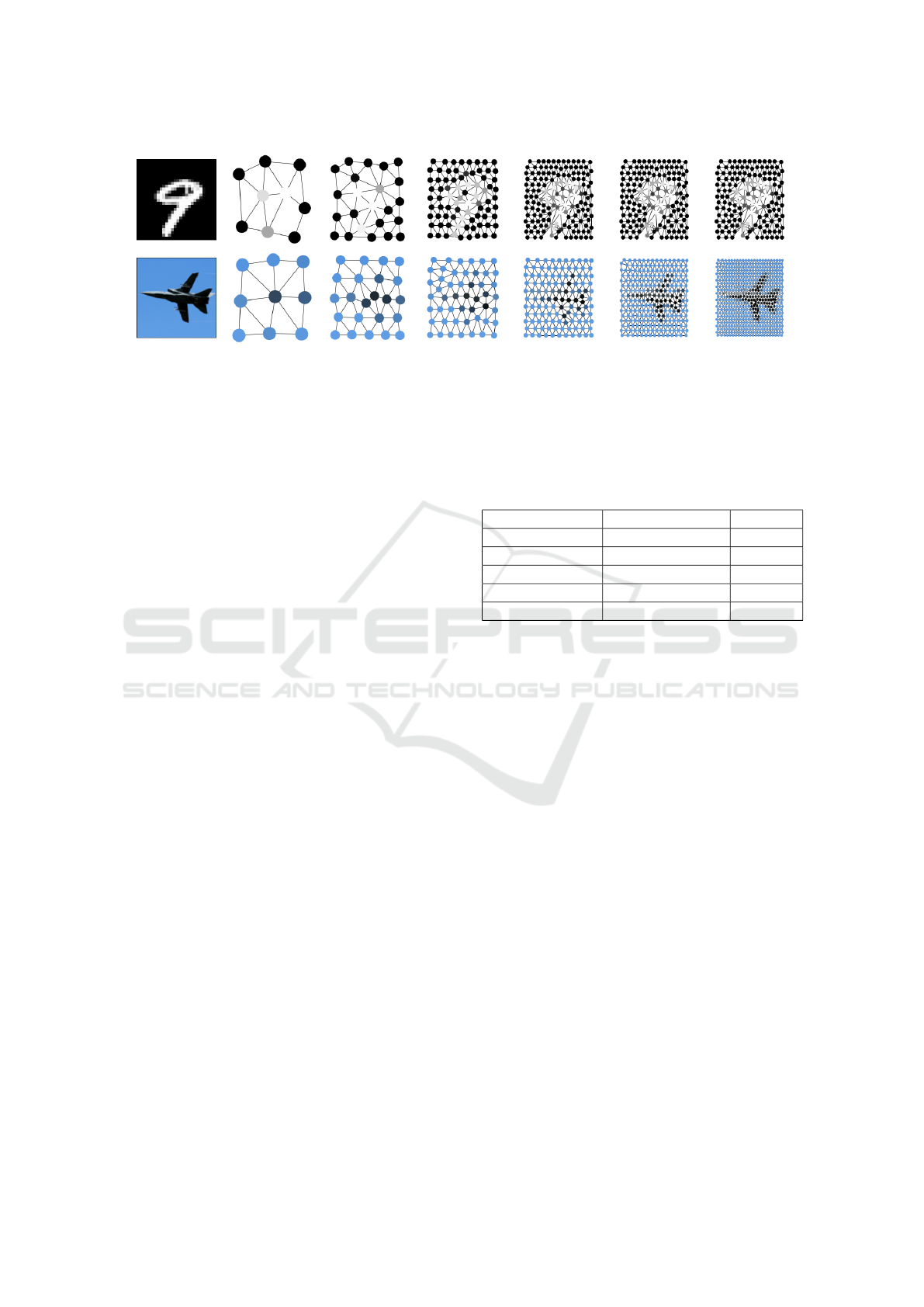
Figure 5: Examples of an original image and the RAGs generated for, from top to bottom, MNIST and STL-10 datasets. The
graphs were built using SLICO and n set to, from left to right, 10, 20, 50, 100, 200, and 400.
With d
′
grey
(s
i
, s
j
) defined as:
d
′
grey
= (l
i
− l
j
)
2
(7)
In this experiment, we used the following values
for the parameter k – that determines the node degree
– in the KNN-Spatial and KNN-Combined methods:
1, 2, 4, 8, and 16. It is important to note that self-
loops are always added in the training process and
that the node itself is not considered when comput-
ing its distances from the nodes in the graph. Figure
7 shows examples of graphs produced with the differ-
ent methods and parameter valuations, omitting said
self-loops.
We used as node features average color, centroid,
standard deviation of color, and standard deviation of
centroid. The segmentation method used was SLICO
with a fixed desired number of nodes of 75.
Our results, as seen in Fig. 6, notably show
that performance tends to decrease as we increase
k, with most datasets. In general, the best perfor-
mance is achieved when k = 1, for both KNN-Spatial
and KNN-Combined. An exception to this pattern
is the MNIST dataset, whose best performance was
achieved when k = 2 for KNN-Combined, and when
k = 4 for KNN-Spatial. That suggests that the GCN
layers in the selected model are most helpful when the
information only flows through uniform regions. As
we can see in Fig. 7, in the STL-10 1NN-Combined
graph, most of the airplane in the original image is
connected, while also being almost completely dis-
connected from the background sky.
That suggestion is corroborated by the tendency
of the KNN-Combined method to outperform both
KNN-Spatial and RAG (again, with the exception of
MNIST, in which the best results are achieved with
RAGs and then KNN-Spatial). As can be seen in Fig.
7, the KNN-Combined method tends to be more suc-
cessful in discriminating similar regions.
Since in RAGs, each node can have a variable
number of neighbors, in Table 3 we present the av-
erage degree of each node and the standard deviation
for RAGs generated for representing images in each
dataset. In general, the average degree is close to 5 in
all datasets.
Table 3: RAG’s average node degree and standard deviation
of node degree for each dataset.
Dataset Avg. node degree Std. dev.
MNIST 5.0 0.079
Fashion-MNIST 5.0 0.087
CIFAR-10 5.3 0.016
CIFAR-100 5.3 0.02
STL-10 5.1 0.062
3.5 Evaluating the Combination of Best
Parameters
In the previous experiments, we evaluated how the
different choices involved in the graph-building pro-
cess impact the performance of our GCN model re-
garding three dimensions: node features, number of
nodes, and method for building edges. However, in
each experiment, we tested different alternatives for
a given dimension and kept the other two dimensions
fixed. In this experiment, for each dataset, we identi-
fied the choice that resulted in the best performance
for each of the 3 dimensions. After that, we built
graphs for representing images in each dataset, by
combining the best choices identified in the previ-
ous experiments. Table 4 presents the best choices
for each dimension and each dataset, along with the
performances achieved by the model taking as input
graphs built by combining such choices. In Table 4,
F1 corresponds to the feature-set {average color, stan-
dard deviation of color, centroid, standard deviation
from centroids, number of pixels} and F2 corresponds
to F1 ∪ {average HSV color, standard deviation of
HSV color}.
From the results in Table 4 we can notice that the
best combination achieved the best performance in
Graph Convolutional Networks for Image Classification: Comparing Approaches for Building Graphs from Images
443
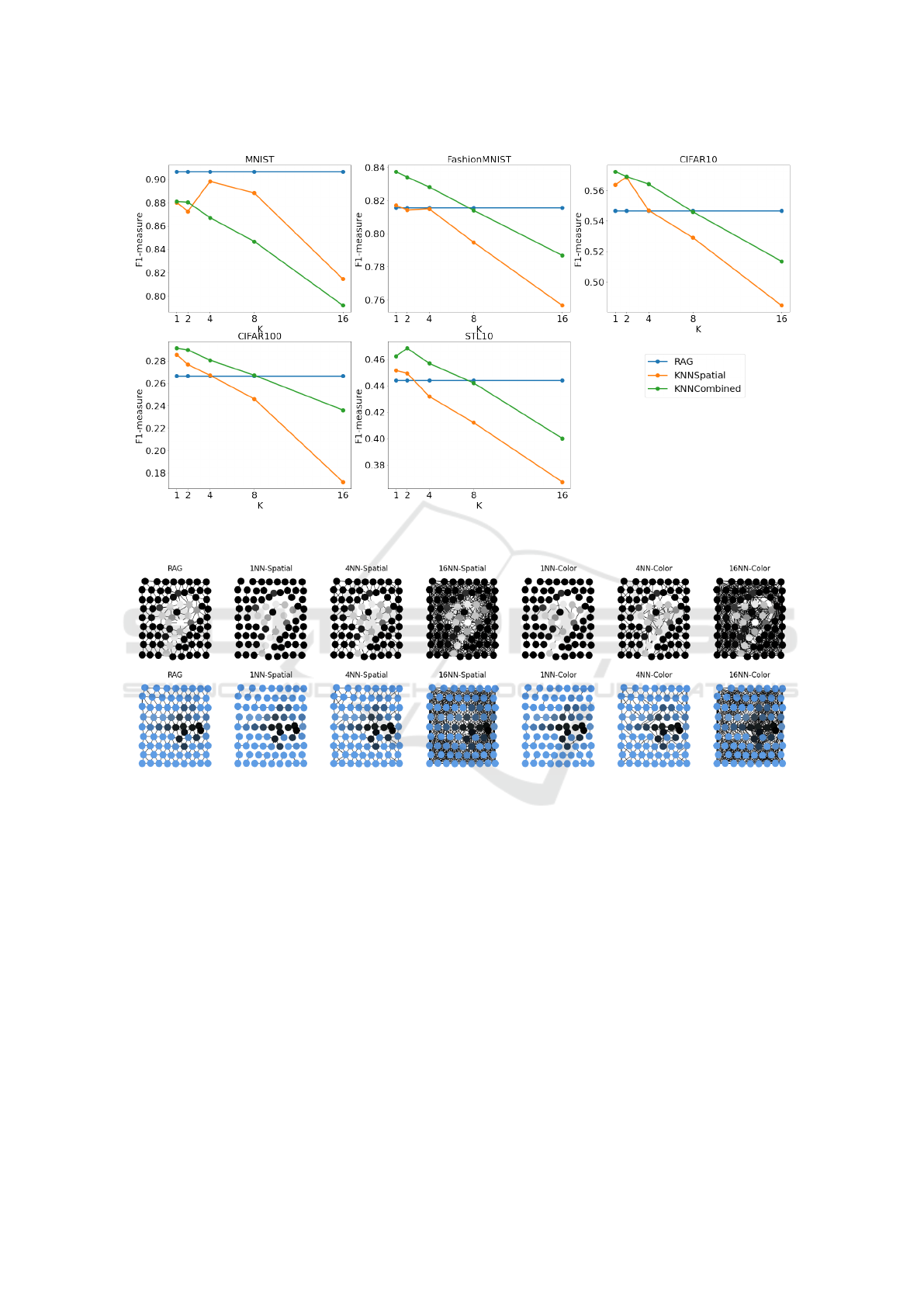
Figure 6: Macro F1-measure in the test set for each dataset with respect to the k parameter of KNN-Spatial and KNN-
Combined methods, with RAG’s performance shown fixed for visualization.
Figure 7: Examples of selected graphs produced in the experiment from the same original images shown in Fig. 5 for MNIST
and STL-10 datasets, each with approximately 75 nodes.
comparison with the best results achieved in the previ-
ous experiments. The exception is MNIST, for which
the best result was achieved with the same feature-set
and edge-building method but with 75 nodes in the
feature-ser assessment experiment with 91.7±0.2 F1-
measure and 91.8±0.2 accuracy.
4 CONCLUSIONS
In this paper, we have systematically analyzed the im-
pacts on the performance of a GCN model for image
classification depending on how we build graphs for
representing images. We evaluated three dimensions
of the graph-building process: node feature selection,
degree of segmentation (number of nodes), and the
approaches for building edges.
We have found that, for the selected datasets, in-
creasing the degree of segmentation and, therefore,
the number of nodes in the graph has a positive im-
pact on the model’s performance. This is expected,
since, as the number of nodes increases, more details
of the original image are represented. However, the
gain in performance follows approximately a loga-
rithmic curve, decreasing as the number of nodes ap-
proaches the total number of pixels. Thus, it is im-
portant to consider this information when using such
approaches, since the memory requirements for stor-
ing graph information grow linearly with the number
of nodes.
The selection of more descriptive features tends to
have a positive effect, compensating for the loss of in-
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
444
Table 4: For each dataset and graph-building choice, test F1-measure with macro average and accuracy for the combination
of the best-performing choices.
Dataset Features Nodes Graph type F1-measure Accuracy
MNIST F1 50 RAG 91.2±0.4 91.3±0.4
Fashion-MNIST F1 200 1NN-Combined 84.0±0.4 84.2±0.4
CIFAR-10 F2 400 1NN-Combined 58.3±0.7 58.5±0.6
CIFAR-100 F2 200 1NN-Combined 30.9±1.1 32.2±0.8
STL-10 F2 400 2NN-Combined 51.8±0.6 52.1±0.4
formation in the segmentation process. The most sig-
nificant increase in performance is seen when adding
spatial information (i.e.: each superpixel’s geomet-
ric centroid) to the color information. However, we
note that the often-suggested pixel-density feature has
been detrimental to the performance in some of the
selected datasets.
By comparing the approaches for building edges,
we have found that, in most cases, increasing the size
of each node’s neighborhood results in a decrease in
performance. The best results were achieved when
neighborhoods were restricted to similar regions.
Grounds for future work include expanding the
analysis to other GNN architectures such as Graph
Attention Networks ((Veli
ˇ
ckovi
´
c et al., 2018)), ex-
ploring the effects of the levels of irregularity of the
image segments (as parameterized by the smoothness
factor in the basic SLIC algorithm), as well as explor-
ing the effects of other methods of image segmenta-
tion.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
S
¨
usstrunk, S. (2012). SLIC Superpixels Compared to
State-of-the-Art Superpixel Methods. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
34(11):2274–2282. Conference Name: IEEE Trans-
actions on Pattern Analysis and Machine Intelligence.
Achanta, R. and Susstrunk, S. (2017). Superpixels
and Polygons Using Simple Non-Iterative Clustering.
pages 4651–4660.
Avelar, P. H. C., Tavares, A. R., da Silveira, T. L. T., Jung,
C. R., and Lamb, L. C. (2020a). Superpixel Im-
age Classification with Graph Attention Networks. In
2020 33rd SIBGRAPI Conference on Graphics, Pat-
terns and Images (SIBGRAPI), pages 203–209. ISSN:
2377-5416.
Avelar, P. H. C., Tavares, A. R., da Silveira, T. L. T., Jung,
C. R., and Lamb, L. C. (2020b). Superpixel Im-
age Classification with Graph Attention Networks. In
2020 33rd SIBGRAPI Conference on Graphics, Pat-
terns and Images (SIBGRAPI), pages 203–209, Re-
cife/Porto de Galinhas, Brazil. IEEE.
Bessadok, A., Mahjoub, M. A., and Rekik, I. (2022). Graph
neural networks in network neuroscience. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 45(5):5833–5848.
Chen, B., Li, J., Lu, G., Yu, H., and Zhang, D. (2020). Label
co-occurrence learning with graph convolutional net-
works for multi-label chest x-ray image classification.
IEEE journal of biomedical and health informatics,
24(8):2292–2302.
Chen, C., Wu, Y., Dai, Q., Zhou, H.-Y., Xu, M., Yang,
S., Han, X., and Yu, Y. (2022). A survey on graph
neural networks and graph transformers in computer
vision: A task-oriented perspective. arXiv preprint
arXiv:2209.13232.
Coates, A., Lee, H., and Ng, A. Y. An Analysis of Single-
Layer Networks in Unsupervised Feature Learning.
Defferrard, M., Bresson, X., and Vandergheynst, P. (2016).
Convolutional Neural Networks on Graphs with Fast
Localized Spectral Filtering. In Advances in Neural
Information Processing Systems, volume 29. Curran
Associates, Inc.
Du, H., Yao, M. M.-S., Liu, S., Chen, L., Chan, W. P., and
Feng, M. (2023). Automatic calcification morphology
and distribution classification for breast mammograms
with multi-task graph convolutional neural network.
IEEE Journal of Biomedical and Health Informatics.
Errica, F., Podda, M., Bacciu, D., and Micheli, A. (2022). A
Fair Comparison of Graph Neural Networks for Graph
Classification. arXiv:1912.09893 [cs, stat].
Hong, D., Gao, L., Yao, J., Zhang, B., Plaza, A., and
Chanussot, J. (2020). Graph convolutional net-
works for hyperspectral image classification. IEEE
Transactions on Geoscience and Remote Sensing,
59(7):5966–5978.
Kipf, T. N. and Welling, M. (2017). Semi-Supervised
Classification with Graph Convolutional Networks.
arXiv:1609.02907 [cs, stat].
Krizhevsky, A. Learning Multiple Layers of Features from
Tiny Images.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recog-
nition. Proceedings of the IEEE, 86(11):2278–2324.
Conference Name: Proceedings of the IEEE.
Linh, L. V. and Youn, C.-H. (2021). Dynamic Graph
Neural Network for Super-Pixel Image Classifica-
tion. In 2021 International Conference on Infor-
mation and Communication Technology Convergence
(ICTC), pages 1095–1099. ISSN: 2162-1233.
Long, J., yan, Z., and chen, H. (2021). A Graph Neural
Network for superpixel image classification. Journal
of Physics: Conference Series, 1871(1):012071.
Graph Convolutional Networks for Image Classification: Comparing Approaches for Building Graphs from Images
445

Monti, F., Boscaini, D., Masci, J., Rodol
`
a, E., Svoboda, J.,
and Bronstein, M. M. (2016). Geometric deep learn-
ing on graphs and manifolds using mixture model
CNNs. arXiv:1611.08402 [cs] version: 3.
Reiser, P., Neubert, M., Eberhard, A., Torresi, L., Zhou,
C., Shao, C., Metni, H., van Hoesel, C., Schopmans,
H., Sommer, T., et al. (2022). Graph neural networks
for materials science and chemistry. Communications
Materials, 3(1):93.
Scarselli, F., Gori, M., Tsoi, A. C., Hagenbuchner, M.,
and Monfardini, G. (2009). The Graph Neural Net-
work Model. IEEE Transactions on Neural Networks,
20(1):61–80. Conference Name: IEEE Transactions
on Neural Networks.
Shchur, O., Mumme, M., Bojchevski, A., and G
¨
unnemann,
S. (2019). Pitfalls of Graph Neural Network Evalua-
tion. arXiv:1811.05868 [cs, stat].
Shlomi, J., Battaglia, P., and Vlimant, J.-R. (2020). Graph
neural networks in particle physics. Machine Learn-
ing: Science and Technology, 2(2):021001.
Stutz, D., Hermans, A., and Leibe, B. (2018). Superpixels:
An evaluation of the state-of-the-art. Computer Vision
and Image Understanding, 166:1–27.
Tang, T., Chen, X., Wu, Y., Sun, S., and Yu, M. (2022). Im-
age classification based on deep graph convolutional
networks. In 2022 IEEE 9th International Conference
on Data Science and Advanced Analytics (DSAA),
pages 1–6. IEEE.
Todescato, M. V., Garcia, L. F., Balreira, D. G., and Car-
bonera, J. L. (2024). Multiscale patch-based feature
graphs for image classification. Expert Systems with
Applications, 235:121116.
Van den Bergh, M., Boix, X., Roig, G., and Van Gool, L.
(2015). SEEDS: Superpixels Extracted Via Energy-
Driven Sampling. International Journal of Computer
Vision, 111(3):298–314.
Veli
ˇ
ckovi
´
c, P., Cucurull, G., Casanova, A., Romero, A., Li
`
o,
P., and Bengio, Y. (2018). Graph Attention Networks.
arXiv:1710.10903 [cs, stat].
Wu, L., Chen, Y., Shen, K., Guo, X., Gao, H., Li, S., Pei,
J., Long, B., et al. (2023). Graph neural networks for
natural language processing: A survey. Foundations
and Trends® in Machine Learning, 16(2):119–328.
Wu, Z., Pan, S., Chen, F., Long, G., Zhang, C., and Philip,
S. Y. (2020). A comprehensive survey on graph neural
networks. IEEE transactions on neural networks and
learning systems, 32(1):4–24.
Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-
MNIST: a Novel Image Dataset for Benchmarking
Machine Learning Algorithms. arXiv:1708.07747 [cs,
stat].
Xu, K., Hu, W., Leskovec, J., and Jegelka, S.
(2019). How Powerful are Graph Neural Networks?
arXiv:1810.00826 [cs, stat].
Yao, J., Boben, M., Fidler, S., and Urtasun, R. (2015). Real-
Time Coarse-to-Fine Topologically Preserving Seg-
mentation. pages 2947–2955.
Yassine, B., Taylor, P., and Story, A. (2018). Fully auto-
mated lung segmentation from chest radiographs us-
ing slico superpixels. Analog Integrated Circuits and
Signal Processing, 95(3):423–428.
Zhang, W., Joseph, J., Yin, Y., Xie, L., Furuhata, T., Ya-
makawa, S., Shimada, K., and Kara, L. B. (2023).
Component segmentation of engineering drawings us-
ing graph convolutional networks. Computers in In-
dustry, 147:103885.
Zhang, X.-M., Liang, L., Liu, L., and Tang, M.-J. (2021).
Graph neural networks and their current applications
in bioinformatics. Frontiers in genetics, 12:690049.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
446
