
Finding and Navigating to Humans in Complex Environments for
Assistive Tasks
Asfand Yaar
1 a
, Antonino Furnari
1 b
, Marco Rosano
1 c
, Aki H
¨
arm
¨
a
2 d
and Giovanni Maria Farinella
1 e
1
Department of Mathematics and Computer Science, University of Catania, Italy
2
Department of Advanced Computing Sciences, Maastricht University, The Netherlands
{antonino.furnari, marco.rosano, giovanni.farinella}@unict.it
Keywords:
Assistive AI, Autonomous Exploration, Human-Robot Interaction, Embodied Navigation, Habitat Simulator.
Abstract:
Finding and reaching humans in unseen environments is a major challenge for intelligent agents and social
robots. Effective exploration and navigation strategies are necessary to locate the human performing various
activities. In this paper, we propose a problem formulation in which the robot is required to locate and reach
humans in unseen environments. To tackle this task, we design an approach that makes use of state-of-the-art
components to allow the agent to explore the environment, identify the human’s location on the map, and
approach them while maintaining a safe distance. To include human models, we utilized Blender to modify
the scenes of the Gibson dataset. We conducted experiments using the Habitat simulator, where the proposed
approach achieves promising results. The success of our approach is measured by the distance and orientation
difference between the robot and the human at the end of the episode. We will release the source code and 3D
human models for researchers to benchmark their assistive systems.
1 INTRODUCTION
Autonomous robots able to navigate and interact with
humans could be helpful in many assistive scenarios.
Consider for instance a robot assisting an elderly in
their home to carry out daily activities. The robot
could provide instructions on how to successfully pre-
pare a recipe, remind them to take the medicines at a
given hour or recommend not to sit too much in front
of the TV and go out for a walk once in a while. In
order to achieve such a varied range of assistive tasks
in the home, and in particular to initiate any form
of visual or vocal interaction with the human, robots
should be able to locate the human and reach them
appropriately. For example, in a scenario where a hu-
man instructs a robot, come to me as shown in Fig 2.
The robot needs to explore the environment and
locate the human while keeping track of its progress
to avoid redundant searches. Once the robot has
a
https://orcid.org/0009-0006-6329-3500
b
https://orcid.org/0000-0001-6911-0302
c
https://orcid.org/0009-0003-8680-1246
d
https://orcid.org/0000-0002-2966-3305
e
https://orcid.org/0000-0002-6034-0432
reached the area in which the human is located, it
can calculate the human’s position on the map and ap-
proach them from the right angle to initiate a conver-
sation. This task requires complex exploration strate-
gies, including a combination of implicit objectives
such as exploration, efficient navigation, and interac-
tion. While the ability to locate humans and navigate
to them is a fundamental building block for assistive
robotic applications, there is still a need for a more
systematic investigation of the ability of current algo-
rithms to tackle this task in different environments.
To fill this gap, in this paper, we focus on evalu-
ating robot performance in locating and navigating to
Figure 1: 3D models of humans involved in different ac-
tivities such as watching TV, eating, being on a call, and
cooking used in our experiments.
Yaar, A., Furnari, A., Rosano, M., Härmä, A. and Farinella, G.
Finding and Navigating to Humans in Complex Environments for Assistive Tasks.
DOI: 10.5220/0012271700003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
245-252
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
245

Figure 2: (Left) Robot responding to a human call by exploring the environment with the help of multiple global goals (1-6)
to locate and reach the human. (center) Robot’s observations upon reaching each global goal (1-6) during its exploration of
the environment. (right) Robot’s final observation upon successfully reaching the human at an appropriate angle, depending
on the human’s activity, to initiate a conversation.
the human engaged in various activities such as cook-
ing, eating, talking, watching TV, etc. To complete
this task, the robot explores the environment to lo-
cate and reach the human at a safe distance. We pro-
vide a problem formulation and design a set of base-
lines based on human detection and point-goal navi-
gation to tackle the task. We validate the feasibility of
the task and the effectiveness of the considered base-
lines using the Habitat simulator (Savva et al., 2019)
and the Gibson (Xia et al., 2018) validation dataset
which consists of five complex 3D environments. As
this dataset lacks human models, we used Blender
1
to create four human models, in poses coherent with
the execution of four different activities (eating, cook-
ing, watching TV, and on a call) as illustrated in Fig.
1. Subsequently, we modified the Gibson environ-
ments in Blender to incorporate these human models
at multiple locations, such as the kitchen, TV lounge,
bedroom, and other relevant areas. Results show that
considered baselines achieve promising performance
in locating and reaching the human in an unseen en-
vironment. However, further research is still needed
in this area, and we believe that our proposed ap-
proach can serve as a starting point for future works
on how assistive robots can be used to provide sup-
port to users. The main contributions of this work are
listed below:
• We propose a novel pipeline for efficiently lo-
cating and reaching humans in complex environ-
ments, with a focus on assistive tasks and human-
robot interaction.
• Our approach utilizes global and local goal poli-
cies to generate objectives and precisely reach the
human.
• We made modifications to the Gibson environ-
ments by integrating 3D human models into var-
ious locations, aligning their poses with different
1
https://www.blender.org/
activities in areas such as the kitchen, TV lounge,
and other relevant areas that were previously ab-
sent in the original dataset.
• We show that considered baselines achieve
promising performance in locating and reaching
human in complex 3D environments.
2 RELATED WORK
Our work is related to previous research on embodied
navigation and environment exploration. The embod-
ied visual navigation problem involves an agent using
visual sensing to navigate an environment avoiding
obstacles to reach a given destination (Anderson et al.,
2018a; Anderson et al., 2018b; Batra et al., 2020;
Savva et al., 2019). Over the last decade, the field
has made substantial progress due to the availabil-
ity of large photorealistic 3D scene datasets (Chang
et al., 2017; Ramakrishnan et al., 2021; Xia et al.,
2018) and fast navigation simulators (Savva et al.,
2019; Xia et al., 2018; Kolve et al., 2017). Current
literature on embodied visual navigation can be di-
vided into classic navigation, approaches based on re-
inforcement learning, and exploration.
Classic Navigation. Traditional navigation ap-
proaches involve building a map of the environment,
localizing the agent in the map, and planning paths
to guide the agent to desired locations. Mapping, lo-
calization, and path-planning have been extensively
studied in this context (Hartley and Zisserman, 2003;
Thrun, 2002; LaValle, 2006). However, most of this
research relies on human-operated traversal of the en-
vironment and is classified as passive SLAM. Active
SLAM, which focuses on automatically navigating a
new environment to build spatial representations, has
received less attention. We refer the reader to (Ca-
dena et al., 2016) for a comprehensive review of ac-
tive SLAM literature.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
246

Semantic Mapper
Sensor Pose
Reading (x
t
)
Global Goal Policy Local Policy
action(a
t
)
Observation (RGBD)
long term goal
map (m
t
)
Figure 3: The Semantic Mapper leverages RGB-D and sensor pose reading x
t
to construct a map of the environment (m
t
). The
Global Goal Policy utilizes this map to generate a long-term goal on the map. Finally, the Local Policy generates low-level
actions a
t
to guide the agent toward this long-term goal.
Reinforcement Learning. Different previous works
have formulated navigation as a reinforcement learn-
ing problem (Zhu et al., 2017; Gupta et al., 2017;
Mirowski et al., 2016; Savinov et al., 2018) in which
the robot is an agent interacting with a simulated en-
vironment in order to learn how to navigate it. By
training in several environments, the agents eventu-
ally learn how to extract semantic cues from the in-
put images and generalize them to unseen spaces.
Past works have investigated methods including feed-
forward networks (Zhu et al., 2017), vanilla neu-
ral network memory (Mirowski et al., 2016), spatial
memory and planning modules (Gupta et al., 2017),
semi-parametric topological memory (Savinov et al.,
2018), and imitation learning from an optimal expert
(Gupta et al., 2017). In addition, learning-based ap-
proaches have been used to develop low-level colli-
sion avoidance policies (Dhiraj et al., 2017; Sadeghi
and Levine, 2016). However, these approaches do not
consider task context and only focus on moving to-
ward open space. Other works (Zhang et al., 2017)
use a differentiable map structure to mimic SLAM
techniques.
Exploration. Navigation algorithms are generally
shaped around two main objectives: point-goal nav-
igation and environment exploration. The first class
of methods aims to navigate in order to reach a given
destination provided to the agent in the form of co-
ordinates relative to the current location. Exploration
approaches aim instead to navigate the unknown en-
vironment without an explicit target location in mind
but with the goal to “uncover” all the available space,
which can be useful for mapping the environment or
searching for specific objects. Environment explo-
ration as an Active Neural SLAM (ANS) to gather
information for downstream tasks has been a popu-
lar topic in the past, with many works investigating
it in the context of reinforcement learning (Schmid-
huber, 1991; Stadie et al., 2015; Pathak et al., 2017;
Fu et al., 2017; Lopes et al., 2012; Chentanez et al.,
2004). These works design intrinsic reward functions
that capture the novelty of states or state-action tran-
sitions, which are then used to optimize exploration
policies using reinforcement learning.
Other related works have proposed alternative ex-
ploration methods, such as generating smooth move-
ment paths for high-quality camera scans (Xu et al.,
2017), information-theoretic exploration method us-
ing Gaussian Process regression (Bai et al., 2016), or
assuming access to the ground-truth map at training
time to learn an optimized trajectory that maximizes
the accuracy of the SLAM-derived map (Kollar and
Roy, 2008). Recently, (Chen et al., 2019) used human
navigation trajectories to learn task-independent ex-
ploration through imitation learning. To improve ex-
ploration specifically in object goal navigation tasks,
SemExp (Chaplot et al., 2020b) made use of a mod-
ular policy for semantic mapping and path planning
that directly predicts which action the agent should
take next and estimates the map on the fly.
Overall, there has been a growing interest in de-
veloping robots that can perform diverse tasks in a va-
riety of environments (Lim et al., 2021). Exploration
and navigation are critical components of such sys-
tems, and recent work has made significant progress
in learning exploration policies and developing mod-
ular architectures for navigation. Our work is akin to
these methods, but we investigate the navigation prob-
lem in an assisting care robot scenario by proposing a
method that relies on Habitat simulator and compar-
ing different baselines. The four activities we selected
come from that use case.
Finding and Navigating to Humans in Complex Environments for Assistive Tasks
247

3 PROBLEM DEFINITION
We aim to assess the performance of a robot in lo-
cating and navigating to a human involved in various
activities. We perform our evaluation in an episode-
based fashion, following works on navigation with re-
inforcement learning (Chaplot et al., 2020b; Chaplot
et al., 2020a; Ramakrishnan et al., 2022). At the be-
ginning of an episode, the agent is initialized at a ran-
dom location in the environment and receives a visual
observation o (an RGB-D image) and sensor position
reading x
t
(i.e. x and y coordinates of the agent and its
orientation at time t). The agent then takes a naviga-
tion action a
t
following a learned policy to achieve the
goal of locating and navigating to the human. At each
time step, the robot can choose among the following
actions: move forward, turn right, turn left, and stop.
To successfully complete the task, the stop action
should be called when the agent is confident that the
human has been reached. An episode ends when the
agent calls the stop action or when it reaches the limit
of 500 steps. Note that, since the human may not be
visible from the initial location, the agent should first
explore the environment, then navigate to the human
when they are detected from the visual observation.
This makes this task different from classic point goal
navigation (Anderson et al., 2018a) or environment
exploration works (Zhang et al., 2017; Chaplot et al.,
2020a), effectively requiring a mix of both objectives.
We consider two versions of this problem:
• V1: The first version considers an episode suc-
cessful if the robot reaches the human at a safe
distance (1m) at the end of the episode.
• V2: The second version considers an episode suc-
cessful if the robot reaches the human at a safe
distance (1m) and the difference in orientation be-
tween the robot and the human θ is below a given
threshold.
Evaluations are performed by computing the Suc-
cess weighted by Path Length (SPL) and the Success
Rate (SR) for both versions.
4 PROPOSED METHOD
The proposed approach relies on three key compo-
nents: a Semantic Mapper, a Global Goal Policy, and
a Local Policy. Fig. 3 illustrates the proposed ap-
proach.
Semantic Mapper. The Semantic Mapper is respon-
sible for creating an allocentric semantic map m
t
of
the world by aggregating semantic information ob-
tained from individual RGB-D observations acquired
from time 0 to t. This is done using a state-of-the-art
semantic exploration method (Chaplot et al., 2020b),
which creates a point cloud from depth observations.
Each point in the point cloud is then classified as ei-
ther a person or a background class using the seman-
tic segmentation model. The point cloud is then pro-
jected into the top-down map space using differen-
tiable geometric operations (Henriques and Vedaldi,
2018), resulting in the 3×M×M semantic map m
t
,
with channels 1 and 2 representing obstacles and ex-
plored areas, and the last channel representing the
person class. In our setup, we considered M = 240,
while each element of m
t
corresponds to a 25 cm
2
(5cm×5cm) cell in the physical world and indicates
whether the location contains an obstacle, has been
explored, or contains a person. The spatial map is ini-
tialized to all zeros at the beginning of an episode and
refined during the navigation process.
Global Goal Policy. The Global Goal Policy network
consists of 5 convolutional layers followed by 3 fully
connected layers. It is responsible for determining the
long-term goal in order to reach the human by using
the current map m
t
. If the human is not detected, the
global goal policy aims to explore the environment
and hence predicts a long-term goal using the map
and the agent’s current and previous positions. To re-
duce the exploration complexity, the long-term goal is
predicted once every 25 steps as described in (Chap-
lot et al., 2020a). If the human is detected, the global
goal policy selects a point close to the human as a
long-term goal. It is worth mentioning that both ver-
sions of the task, i.e. V1 and V2, employ the same
global goal policy, with the only distinction being the
evaluation procedure when the robot reaches the hu-
man.
Local Policy. The Local Policy is used to navigate
continuously to the long-term goal defined by the
Global Goal Policy by calculating the shortest path
from the current position to the target one using the
Fast Marching Method (Sethian, 1999). The obstacle
channel from the semantic map is used to determine
the optimal path while avoiding obstacles. The local
policy then uses deterministic actions to navigate the
agent along this shortest path. At each time step, the
map is updated and the path to the long-term goal is
re-computed.
5 EXPERIMENTS AND RESULTS
Gibson (Xia et al., 2018) and Matterport3D (MP3D)
datasets (Chang et al., 2017) were employed in the
Habitat simulator (Savva et al., 2019) for training pur-
poses. These datasets contain 3D reconstructions of
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
248

(b)
(a)
Figure 4: (a) Final observation of robot while successfully locating and reaching a human engaged in various activities, on
call, cooking, eating, and watching TV respectively. (b) Some examples where the robot was unable to locate the human
within 500 steps.
real-world environments. The training set includes
a total of 86 scenes, consisting of 25 scenes from
the Gibson tiny set and 61 scenes from the MP3D
dataset. Since the human models are not included in
these datasets, we employed Blender to create multi-
ple human models. These models were posed to align
with the execution of various activities, such as eating,
cooking, watching TV, and being on a call (see Fig
1), etc. We then edited the Gibson environments us-
ing Blender to integrate these human models at multi-
ple locations, including the kitchen, TV lounge, bed-
room, and other relevant areas. Note that, due to
the computation-intensive nature of the manual inte-
gration process, our current implementation includes
four human models.
The observation space consists of RGBD images
with a size of 4×640×480, while the action space
includes four possible actions: move forward (0.25
cm), turn right (10 degrees), turn left (10 degrees),
and stop. The success threshold is set to 1m. For
person detection and segmentation, we use a Mask-
RCNN semantic segmentation model (He et al., 2017)
with a ResNet50 (He et al., 2016) backbone, pre-
trained on MS-COCO (Lin et al., 2014). We use Suc-
cess weighted by Path Length (SPL) and Ratio of suc-
cessful episodes (SR) to measure the efficiency of lo-
cating and reaching the human. We evaluate the pro-
posed approach on the 20 modified environments of
the Gibson dataset that were not seen during the train-
ing of the different components of our approach. This
allowed us to examine how well the learned policies
generalize to previously unseen environments.
We run 2000 evaluation episodes, with each scene
containing 100 episodes. We consider the two vari-
ants of the task: V1 aims to reach the human from
any angle, whereas in V2 episode success depends on
the orientation difference between the robot and the
human at the end of the episode. Table 1 provides
quantitative results for V1, where the SPL and SR
values for each activity in different environments are
presented separately. The performance of the robot
is observed to vary across environments, with larger
Finding and Navigating to Humans in Complex Environments for Assistive Tasks
249
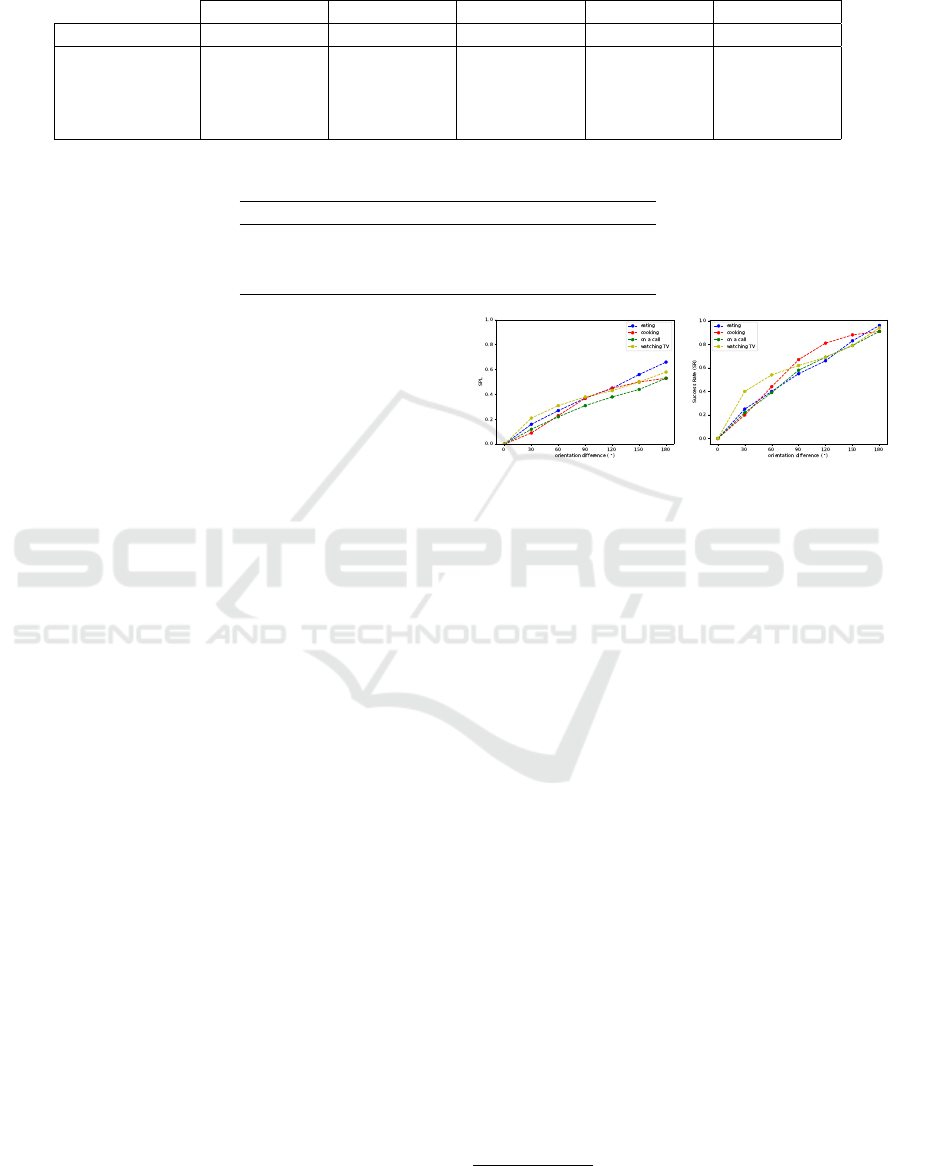
Table 1: SPL and SR for the V1 task on the Gibson validation dataset for each activity.
Gibson Environments
Collierville Corozal Darden Markleeville Wiconisco
Activity SPL SR SPL SR SPL SR SPL SR SPL SR
1. Eating 0.80 0.99 0.62 0.99 0.68 0.96 0.63 0.94 0.57 0.96
2. Cooking 0.59 0.95 0.41 0.89 0.54 0.88 0.69 0.97 0.41 0.85
3. Watching TV 0.70 0.99 0.31 0.77 0.40 0.94 0.55 0.90 0.69 0.99
4. On a call 0.74 0.99 0.67 0.96 0.56 0.98 0.53 0.93 0.40 0.84
Table 2: Average SPL and SR on the Gibson validation dataset.
Task SPL (↑) SR (↑)
V1 (any angle) 0.57 0.93
V2 (θ ≤ 60
◦
) 0.25 0.44
V2 (θ ≤ 30
◦
) 0.14 0.26
environments posing greater challenges for the robot.
Notably, the robot has a limit of 500 steps to locate
the human, and as a result, there are instances where
the robot fails to locate the human within the specified
time frame. Fig 4b provides visual examples of such
instances of failure. Our proposed approach achieves
a 93% SR and a 57% SPL under V 1. However, in
V 2(θ = 30
◦
), our approach only achieved a 26% SR
and a 14% SPL. This suggests that V2 of the task
is much more challenging and more research is still
needed.
To illustrate the effect of evaluating models with
different orientation thresholds, we plot the SPL and
SR for multiple variants of V 2 approach with varying
orientation thresholds (0
◦
− 180
◦
) in Fig 5. The plot
shows that the SPL and SR increase as we raise the
orientation tolerance threshold. Interestingly, even
when setting a threshold of 90
◦
, results are not sat-
isfactory, with a SPL of about 0.35 and a SR of about
0.6. This suggests that the considered task is chal-
lenging and there is a lot of space for improvement.
Fig. 4 finally shows some success (a) and failure (b)
qualitative navigation episodes along with the final vi-
sual observation of the agent. As can be seen, the ap-
proach can reach the human from the right angle in
some of the cases. Table 2 presents the overall results
of the proposed approach.
6 CONCLUSION
In this paper, we proposed a navigation problem for-
mulation as a first essential step towards building au-
tonomous task-oriented assistive robots for home use
cases. In the considered setup, an agent has to find
humans and reach them at a safe distance, in order
to provide assistance. The experiments performed
Figure 5: SPL (left) and Success Rate (right) of the naviga-
tion tasks, considering different thresholds on the angle be-
tween the robot and the human. The episode is considered
successful if the robot reaches the human at a safe distance
and with a robot-human orientation difference lower than
the given threshold.
on the Gibson dataset comprising 3D human models
show that this is a promising direction for the devel-
opment of a flexible framework for assistive robots.
In future research, we plan to extend the proposed
framework with more intelligent task-oriented robot
behaviors sensitive to the situational and social con-
ventions of natural home environments.
ACKNOWLEDGEMENT
This research has been supported by the PhilHumans
project
2
supported by Marie Skłodowska-Curie Inno-
vative Training Networks - European Industrial Doc-
torates under grant agreement No. 812882.
REFERENCES
Anderson, P., Chang, A., Chaplot, D. S., Dosovitskiy, A.,
Gupta, S., Koltun, V., Kosecka, J., Malik, J., Mot-
taghi, R., Savva, M., et al. (2018a). On evalua-
tion of embodied navigation agents. arXiv preprint
arXiv:1807.06757.
2
https://www.philhumans.eu/
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
250

Anderson, P., Wu, Q., Teney, D., Bruce, J., Johnson, M.,
S
¨
underhauf, N., Reid, I., Gould, S., and Van Den Hen-
gel, A. (2018b). Vision-and-language navigation: In-
terpreting visually-grounded navigation instructions
in real environments. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3674–3683.
Bai, S., Wang, J., Chen, F., and Englot, B. (2016).
Information-theoretic exploration with bayesian op-
timization. In 2016 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
1816–1822. IEEE.
Batra, D., Gokaslan, A., Kembhavi, A., Maksymets, O.,
Mottaghi, R., Savva, M., Toshev, A., and Wijmans,
E. (2020). Objectnav revisited: On evaluation of em-
bodied agents navigating to objects. arXiv preprint
arXiv:2006.13171.
Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza,
D., Neira, J., Reid, I., and Leonard, J. J. (2016). Past,
present, and future of simultaneous localization and
mapping: Toward the robust-perception age. IEEE
Transactions on robotics, 32(6):1309–1332.
Chang, A., Dai, A., Funkhouser, T., Halber, M., Niessner,
M., Savva, M., Song, S., Zeng, A., and Zhang, Y.
(2017). Matterport3d: Learning from rgb-d data in in-
door environments. arXiv preprint arXiv:1709.06158.
Chaplot, D. S., Gandhi, D., Gupta, S., Gupta, A., and
Salakhutdinov, R. (2020a). Learning to explore using
active neural slam. arXiv preprint arXiv:2004.05155.
Chaplot, D. S., Gandhi, D. P., Gupta, A., and Salakhut-
dinov, R. R. (2020b). Object goal navigation using
goal-oriented semantic exploration. Advances in Neu-
ral Information Processing Systems, 33:4247–4258.
Chen, T., Gupta, S., and Gupta, A. (2019). Learning
exploration policies for navigation. arXiv preprint
arXiv:1903.01959.
Chentanez, N., Barto, A., and Singh, S. (2004). Intrinsically
motivated reinforcement learning. Advances in neural
information processing systems, 17.
Dhiraj, G., Pinto, L., and Gupta, A. (2017). Learning to fly
by crashing. In IROS.
Fu, J., Co-Reyes, J., and Levine, S. (2017). Ex2: Explo-
ration with exemplar models for deep reinforcement
learning. Advances in neural information processing
systems, 30.
Gupta, S., Davidson, J., Levine, S., Sukthankar, R., and Ma-
lik, J. (2017). Cognitive mapping and planning for
visual navigation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2616–2625.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. Cambridge university press.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Henriques, J. F. and Vedaldi, A. (2018). Mapnet: An al-
locentric spatial memory for mapping environments.
In proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 8476–8484.
Kollar, T. and Roy, N. (2008). Trajectory optimization using
reinforcement learning for map exploration. The In-
ternational Journal of Robotics Research, 27(2):175–
196.
Kolve, E., Mottaghi, R., Han, W., VanderBilt, E., Weihs, L.,
Herrasti, A., Deitke, M., Ehsani, K., Gordon, D., Zhu,
Y., et al. (2017). Ai2-thor: An interactive 3d environ-
ment for visual ai. arXiv preprint arXiv:1712.05474.
LaValle, S. M. (2006). Planning algorithms. Cambridge
university press.
Lim, V., Rooksby, M., and Cross, E. S. (2021). Social robots
on a global stage: establishing a role for culture dur-
ing human–robot interaction. International Journal of
Social Robotics, 13(6):1307–1333.
Lin, T., Maire, M., Belongie, S. J., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft COCO: common objects in context. In
Fleet, D. J., Pajdla, T., Schiele, B., and Tuytelaars,
T., editors, Computer Vision - ECCV 2014 - 13th
European Conference, Zurich, Switzerland, Septem-
ber 6-12, 2014, Proceedings, Part V, volume 8693 of
Lecture Notes in Computer Science, pages 740–755.
Springer.
Lopes, M., Lang, T., Toussaint, M., and Oudeyer, P.-Y.
(2012). Exploration in model-based reinforcement
learning by empirically estimating learning progress.
Advances in neural information processing systems,
25.
Mirowski, P., Pascanu, R., Viola, F., Soyer, H., Ballard,
A. J., Banino, A., Denil, M., Goroshin, R., Sifre,
L., Kavukcuoglu, K., et al. (2016). Learning to
navigate in complex environments. arXiv preprint
arXiv:1611.03673.
Pathak, D., Agrawal, P., Efros, A. A., and Darrell, T. (2017).
Curiosity-driven exploration by self-supervised pre-
diction. In International conference on machine learn-
ing, pages 2778–2787. PMLR.
Ramakrishnan, S. K., Chaplot, D. S., Al-Halah, Z., Malik,
J., and Grauman, K. (2022). Poni: Potential func-
tions for objectgoal navigation with interaction-free
learning. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
18890–18900.
Ramakrishnan, S. K., Gokaslan, A., Wijmans, E.,
Maksymets, O., Clegg, A., Turner, J., Undersander,
E., Galuba, W., Westbury, A., Chang, A. X., et al.
(2021). Habitat-matterport 3d dataset (hm3d): 1000
large-scale 3d environments for embodied ai. arXiv
preprint arXiv:2109.08238.
Sadeghi, F. and Levine, S. (2016). Cad2rl: Real single-
image flight without a single real image. arXiv
preprint arXiv:1611.04201.
Savinov, N., Dosovitskiy, A., and Koltun, V. (2018). Semi-
parametric topological memory for navigation. arXiv
preprint arXiv:1803.00653.
Finding and Navigating to Humans in Complex Environments for Assistive Tasks
251

Savva, M., Kadian, A., Maksymets, O., Zhao, Y., Wijmans,
E., Jain, B., Straub, J., Liu, J., Koltun, V., Malik, J.,
et al. (2019). Habitat: A platform for embodied ai re-
search. In Proceedings of the IEEE/CVF international
conference on computer vision, pages 9339–9347.
Schmidhuber, J. (1991). A possibility for implementing
curiosity and boredom in model-building neural con-
trollers. In Proc. of the international conference on
simulation of adaptive behavior: From animals to an-
imats, pages 222–227.
Sethian, J. A. (1999). Fast marching methods. SIAM review,
41(2):199–235.
Stadie, B. C., Levine, S., and Abbeel, P. (2015). Incentiviz-
ing exploration in reinforcement learning with deep
predictive models. arXiv preprint arXiv:1507.00814.
Thrun, S. (2002). Probabilistic robotics. Communications
of the ACM, 45(3):52–57.
Xia, F., Zamir, A. R., He, Z., Sax, A., Malik, J., and
Savarese, S. (2018). Gibson env: Real-world percep-
tion for embodied agents. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 9068–9079.
Xu, K., Zheng, L., Yan, Z., Yan, G., Zhang, E., Niess-
ner, M., Deussen, O., Cohen-Or, D., and Huang,
H. (2017). Autonomous reconstruction of unknown
indoor scenes guided by time-varying tensor fields.
ACM Transactions on Graphics (TOG), 36(6):1–15.
Zhang, J., Tai, L., Liu, M., Boedecker, J., and Burgard, W.
(2017). Neural slam: Learning to explore with exter-
nal memory. arXiv preprint arXiv:1706.09520.
Zhu, Y., Mottaghi, R., Kolve, E., Lim, J. J., Gupta, A., Fei-
Fei, L., and Farhadi, A. (2017). Target-driven visual
navigation in indoor scenes using deep reinforcement
learning. In 2017 IEEE international conference on
robotics and automation (ICRA), pages 3357–3364.
IEEE.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
252
