
Trajectory Augmentation for Robust Neural Locomotion Controllers
Dhruv Agrawal
1,2 a
, Mathias K
¨
onig
1 b
, Jakob Buhmann
2 c
, Robert Sumner
1,2 d
and Martin Guay
2 e
1
Department Informatik, ETH Z
¨
urich, Zurich, Switzerland
2
DisneyResearch|Studios, Zurich, Switzerland
Keywords:
Nearest Neighbor Search, Data Augmentation, Neural Networks, Motion Generation.
Abstract:
Neural Locomotion Controllers are promising real-time character controllers that can learn directly from mo-
tion data. However, the current state of the art models suffer from artifacts such as Pose Blocking and Foot
Skating caused by poor generalization to real world control signals. We show that this is due to training on
unbalanced biased datasets with poor representation for many important gaits and transitions. To solve this
poor data problem, we introduce Trajectory Augmentation (TrajAug), a fully automatic data augmentation
technique that generates synthetic motion data by using motion matching to stitch sequences from the original
dataset to follow random trajectories. By uniformly sampling these trajectories, we can rebalance the dataset
and introduce sharper turns that are commonly used in-game but are hard to capture. TrajAug can be eas-
ily integrated into the training of existing neural locomotion controllers without the need for adaptation. We
show that TrajAug produces better results than training on only the original dataset or a manually augmented
dataset.
1 INTRODUCTION
Neural Locomotion Controllers aim to replace the
complex animation blend trees that are currently used
by most game titles. In place of defining rules and
state transitions between different animation clips
when using blend trees, Neural Locomotion Con-
trollers can directly generate motion given user in-
put. While we have witnessed several Neural Loco-
motion Controllers such as (Zhang et al., 2018; Hen-
ter et al., 2020; Holden et al., 2020) emerge in re-
cent years, their performance gets limited by the lack
of the complete motion capture dataset. For exam-
ple, using the public LaFan1 dataset (Harvey et al.,
2020), and training the public Mode-adaptive Neural
Network (MANN) architecture, results in foot skat-
ing and blocking artifacts, as shown in our video.
Recording a high quality motion capture dataset re-
quires large amounts of planning and it is easy to
overlook certain transitions and gait types, while si-
multaneously oversampling others. This often results
a
https://orcid.org/0009-0005-0442-9781
b
https://orcid.org/0009-0002-4674-100X
c
https://orcid.org/0009-0008-3038-4881
d
https://orcid.org/0000-0002-1909-8082
e
https://orcid.org/0009-0002-7496-6185
in multiple visits to the motion capture studio, further
adding to costs.
Even with a well captured dataset, human-
recorded motion is often not as responsive as what
games require. In video games (e.g. using motion
matching), exaggerated character motions are synthe-
sized on the fly by blending motion clips in order to
provide a responsive experience to the user. Training
only on human motion does not cover this space of
faster-than-real turns.
Data Augmentation has been widely embraced in
machine learning. While affine transforms and color
shifts for images in Computer Vision are well known
examples, other sub-fields such as Natural Language
Processing and Computational Biology also rely on
data augmentation to improve generalization for tasks
with limited data. These include machine translation
and sampling pretrained large language models for
text samples (Li et al., 2022) and even using GANs to
generate synthetic medical data (Chin-Cheong et al.,
2019). However, for training Neural Locomotion
Controllers, data augmentation has been limited to
only mirroring the original motion capture.
In this paper, we introduce a fully automatic data
augmentation technique we call Trajectory Augmen-
tation (TrajAug). From a source locomotion dataset,
Agrawal, D., König, M., Buhmann, J., Sumner, R. and Guay, M.
Trajectory Augmentation for Robust Neural Locomotion Controllers.
DOI: 10.5220/0012273300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 25-33
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
25

Figure 1: Trajectory Driven Augmentation takes a source mocap dataset and simulates user controls to synthesize a new
dataset using motion matching. The augmented data is then used to train a neural controller with fewer artifacts (see our
video) and is more responsive to real-time user directives.
we leverage motion matching to synthesize new mo-
tion clips in order to generate a balanced dataset that
also includes sharper turns. Our approach can be eas-
ily incorporated into existing neural controller train-
ing without any modification and results in neural
controllers with reduced artifacts, such as pose block-
ing and foot skating; and that is more responsive to
user directives at run-time.
We show results of Trajectory Augmentation ap-
plied to the Mode-adaptive Neural Network (MANN)
(Zhang et al., 2018) controller, as well as to the
Learned Motion Matching (LMM) (Holden et al.,
2020) controller, both trained on the LaFan1 dataset
(Harvey et al., 2020). We evaluate these controllers
for foot skating and responsiveness, and conclude that
both qualitatively and quantitatively, Trajectory Aug-
mentation improves the quality of neural controllers.
2 RELATED WORK
In practice, many interactive character controllers are
based on blend trees that blend between motion clips
(e.g. walking forward, left, right), and transition be-
tween different states such as walking, jumping, and
idling. These controllers are very responsive due to
the blending, but their authoring becomes increas-
ingly complex with the number of actions and states
the character can perform. Motion Matching (Clavet
and B
¨
uttner, 2015) is a popular approach that oper-
ates on raw mocap data and uses nearest neighbor
search, together with motion blending to synthesize
movements on-the-fly corresponding to the user in-
put. It has been used in popular video game titles such
as Fifa and Madden to synthesize locomotion and
character-scene interactions in real-time (Harrower,
2018; Allen, 2021). While motion matching is pop-
ular in practice due to the quality of movements and
responsiveness, it keeps the dataset in memory which
neural controllers—being compact learned models
(Holden et al., 2017; Starke et al., 2020; Zhang et al.,
2018; Starke et al., 2019; Ling et al., 2020; Holden
et al., 2020; Lee et al., 2018)—promise to alleviate.
Neural Controllers. The first phase-functioned neu-
ral network (PFNN) (Holden et al., 2017) blends be-
tween four networks using a cycle phase parameter.
MANN (Zhang et al., 2018) introduced a learned mix-
ture of experts model, that predicts different blending
weights of the motion prediction networks, based on
phase parameters. Having a single global phase for
the full body can lead to averaging problems for dif-
ferent actions for the lower and upper bodies. Local
phases were introduced to address this issue (Starke
et al., 2020). However, these methods require datasets
labeled with phases. The work on deep phases (Starke
et al., 2022) is an unsupervised approach to predicting
phase parameters for an unstructured motion dataset.
These phase parameters can then be used to train a
MANN architecture motion controller.
Learned motion matching (Holden et al., 2020)
was introduced to reduce the memory footprint of mo-
tion matching by replacing certain components with
learned alternatives. They first train a pair of neural
networks, called Compressor and Decompressor, to
learn a mapping from a learned encoding and feature
vector to the full pose. Next, they learn the Projec-
tor and Stepper networks to convert the full pose to
the feature code and to step forward in time. Using
the Decompressor, Projector, and Stepper networks,
they can perform motion matching with large datasets
without increasing time or space requirements. While
achieving compression, they do not systematically re-
move the bias of the original.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
26

Our approach is model and task agnostic and com-
patible with both architectures. It is a utility that
acts on the input dataset to improve the quality of the
trained models.
Another type of controller is based on a pre-
trained motion Variational Auto Encoder (VAE)
model (Ling et al., 2020) followed by a controller
sampling points in the VAE latent space—trained us-
ing reinforcement learning. This approach is limited
by the dataset bias the motion VAE was trained on and
we suspect our approach would improve their results
due to a more balanced dataset and sharper turns. Hu-
mor (Rempe et al., 2021) additionally learned a con-
ditional motion prior based on the previous state.
Motion Inbetweening. A similar task tackled with
deep learning is motion inbetweening (Tang et al.,
2022; J Qin, 2022; Tang et al., 2023), where mod-
els are trained to generate a pose given keyframes and
timing. We believe our approach could be applied to
the dataset these models are trained on and could im-
prove the performance for transitions less present in
the original dataset.
Physics-Based Deep Reinforcement Learning. An-
other line of work uses the laws of physics to gener-
ate motions while using example motion clips to imi-
tate in the reinforcement learning process (Bergamin
et al., 2019; Yao et al., 2022; Peng et al., 2022). Us-
ing motion matching to generate movements match-
ing target trajectories, (Bergamin et al., 2019) then
makes physics-based corrections to clean the motions
such as interaction with the ground. We believe this
approach could be used instead of the original motion
matching algorithm we use to create cleaner data for
training neural controllers.
On a more global note, neural controllers have
limited data to train with in terms of ground or ter-
rain shapes, as well as actor sizes. Deep RL and
physics could be an interesting way of taking a finite
motion set and generating additional movements that
conform to more terrains and re-targeted to different
character sizes.
3 TRAJECTORY
AUGMENTATION
The importance of data augmentation has been widely
accepted for machine learning. However, for full
body motion data, augmentation techniques beyond
trivial mirroring have not been explored.
Our approach takes a finite locomotion dataset as
input and creates a larger dataset by simulating the
user controls over time and leveraging motion match-
ing (Clavet and B
¨
uttner, 2015) to synthesize full-body
skeletal motion that conforms to the control direc-
tives. The architecture of our method can be seen in
Figure 1. As user control is randomly simulated, we
can increase the total dataset size by multiple folds.
3.1 Motion Matching
Motion matching can be viewed as a temporal blend-
ing between a current motion clip and the next desired
motion, resulting from a nearest neighbor search.
For locomotion, the nearest neighbor search op-
erates on a feature space comprised of current pose
descriptors and samples of the immediate future mo-
tion path. The pose descriptors contain the current 3d
feet positions and velocities, as well as 3d hip veloci-
ties. The motion path is made up of 2d root velocities,
positions, and directions at 20, 40, and 60 frames into
the future. This corresponds to the immediate future
motion path projected to the ground. After searching
the dataset, a clip is recovered and blended with the
current motion over a time window. For a detailed de-
scription, we defer to (Clavet and B
¨
uttner, 2015) and
(Holden et al., 2020).
Upon closer inspection of the LaFan1 dataset,
we see that while it contained backward motions, it
lacked numerous important gait and directional tran-
sitions involving backwards motion. This represents
a class of trajectories that can be generated using Mo-
tion matching but lie out-of-distribution of our orig-
inal dataset. Using motion matching, we introduce
some of these transitions into the data.
In the following section, we describe automati-
cally recovering these transitions without any expert
cataloguing.
3.2 Generating Control Trajectories
For a robust neural locomotion controller, we need to
represent a wide variety of motions. These include
idling at zero velocity, walking, running, and straf-
ing while turning at different frequencies (changing
direction quickly or smoothly).
Our approach takes as input a single scale param-
eter w and we break down the synthesis into three
parts: first, we create an overall shape of the trajec-
tories by creating splines (Figure 2a). In a second
step, we stitch them together into a long continuous
path (Figure 2b). This path captures the shape of the
control signals, but not the gait type, nor the velocity,
such as zero velocity for idling, and higher velocities
for quick changes in directions. Hence in the last part
(Figure 2c), we re-parameterize the path into a uni-
form distribution of control signals. These include at
Trajectory Augmentation for Robust Neural Locomotion Controllers
27

(a) Control Segments (b) Control Path (c) Control Trajectory
Figure 2: The Control Trajectory Generation consists of three steps. First individual smaller control segments are created
randomly around the zero point seen in (a). (b) shows the resulting control path after all control segments have been stitched
together and in (c) we can see the joystick signal of the extracted control trajectory that is provided to the motion matching
algorithm.
times zero velocities for idling, as well as different
turning frequencies (by sampling at higher speeds),
together with gait parameters for idling, walking, run-
ning, and strafing. This gives us added control on pro-
portion of each gait type and facing direction.
Control Segments Using Splines
One of the hardest tasks for a neural locomotion con-
troller is reliably generating sharp turns. Due to poor
representation in the training data and averaging ar-
tifacts, neural controllers lose the high frequency de-
tails in such motion. Wander and Seek (Ravel, 2021)
are two steering algorithms that are commonly used
controlling background crowd characters in games.
Both algorithms modify the current velocity by an ex-
ternal force. The Wander algorithm uniformly sam-
ples a direction and a magnitude for the force. In
contrast, the Seek algorithm adds a force in the direc-
tion of another object being “seeked” with maximum
magnitude. Both these algorithms perform well for
background characters that are required to move pre-
dictably and not be distracting. However, the protago-
nist, i.e. the user controlled character, does not move
similar to these background characters and needs to
make sharp turns regularly. Creating sharp turns with
these algorithms would require adding a large acceler-
ations in the opposite direction to the current velocity.
This requires careful calibration of the force sampling
to get a good balance between moving straight, slow
turns and sharp turns.
We instead use cubic splines with control points
lying on concentric circles to generate the trajecto-
ries.
For each curve, we use three points x
1
, x
2
, x
3
∈ R
2
.
The starting point, x
1
, always lies at the center of two
concentric circles. The second and third points are
sampled uniformly on the two circles of different
sizes:
θ
i
∼ U[0, 2π),
r
i
∼ U[r
i
min
, r
i
max
],
x
2
= cos(θ
1
)r
1
, sin(θ
1
)r
1
,
x
3
= cos(θ
2
)r
2
, sin(θ
2
)r
2
(1)
Consider the two line segments, x
1
− x
2
and x
2
−
x
3
. If the angle between the two line segments is large,
then the cubic spline fitted to these three points will
have large straight sections and a slow turn. But if
the angle between the line segments is very acute, i.e.
the three points are close to co-linear, then the fitted
spline with produce a sharp turn close to x2. Since the
three points are uniformly sampled, the angle between
the line segments also varies randomly. Giving us a
good mix of turns at different speeds.
We found the following parameters of the radii to
give a good balance between the different types of
turns:
r
1
min
= 1.0w,
r
1
max
= 3.0w,
r
2
min
= 0.2w,
r
2
max
= 5.0w
(2)
Note in Figure 2a, how x
2
and x
3
can lie on an
inner and outer circle interchangeably as the radii
ranges overlap for x
2
and x
3
in Equation (2). Sam-
pling curves as such enables us to generate a wider
variety of curvatures and directions.
Control Path
We fit a cubic spline to the three points of the segment
and repeat the process K times. Then stitching the
segments together by integrating the last position into
the next spline positions and aligning the respective
end and start rotations, resulting in a long continuous
control path x(s) as shown in Figure 2b.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
28

Figure 3: An example of a control trajectory holding a wide
variety of both smooth and sharp turns, as well as different
actions such as idling (blue), walking (green), and running
(red), together with transitions between them.
Control Trajectories
Using our control path x(s) that holds the shape of
joystick trajectories, we create a discrete sampling of
the path s
i
that we call Control Trajectories, com-
prised of a joystick direction d
i
, and action state c
i
.
We start at time s
0
= 0 and sample a time
window of length N ∼ (120, 1200) frames. Each
frame s
i
in the window will have one gait parame-
ter that we sample from a uniform distribution c
i
∼
U({idling, walking, running} × {forward, strafing})
(using one-hot encoding) and we will advance from
one frame to another using a velocity sampled from a
uniform distribution as detailed below.
For idling, we need to emulate a control signal that
is not moving, and thus set the idling velocity distri-
bution to zero:
v
idle
∼ (0, 0) (3)
For the locomotion gaits (walking and running),
we want a variety of high and low-frequency changes
in directions, and thus sample uniformly between low
and high values of velocities:
v
locomotion
∼ (1.5w, 4.0w) (4)
To emulate how the joystick is smoothly moving
and not discretely jumping from one velocity to an-
other, we blend the velocities over each window using
a simple spring-based interpolation. Figure 2c shows
the joystick direction and magnitude over the gener-
ated control path.
Using our velocity v
i
, we advance in parameter
space s
i+1
= s
i
+v
i
. We then compute our control sig-
nals (joystick states) as the difference between con-
secutive points d
i
= x(s
i+1
) − x (s
i
) and bundle it to-
gether with the gait type c
i
. We then use this simu-
lated gamepad data and feed it into the motion match-
ing algorithm to generate human motions correspond-
ing to the control signal.
4 EXPERIMENTS
To evaluate our approach, we look at trajectory cover-
age (balance), foot skating, and responsiveness sim-
ilar to (Lee et al., 2021). To this end we take the
LaFan1 (Harvey et al., 2020) dataset and augment it
with our TrajAug approach , as well as with a man-
ually created dataset(Manual), where we record user
input when controlling a gamepad. For each evalua-
tion, we train two different neural controllers MANN
(Zhang et al., 2018) and LMM (Holden et al., 2020),
on the three datasets: source, Manual, and our Trajec-
tory Augmentation (TrajAug). Note that to evaluate
foot skating on a common basis, we did not utilize
post-process inverse kinematics in any part of our ex-
periments.
4.1 Source Dataset
The LaFan1 (Harvey et al., 2020) dataset contains
high-quality motion clips for a number of scenarios
from 5 different actors. In our implementation, we
use the clips from Actor 5 relating to walking and run-
ning. The complete dataset contains about 496672
motion frames at 30fps (∼4.6 hours). However, we
use the same small subset as (Holden et al., 2020) of
14975 motion frames (∼8.3 mins) , entailing a fair
comparison to their pre-trained model.
4.2 Neural Controllers
We evaluate our data augmentation using two dif-
ferent types of neural controllers. One is a popu-
lar phased-based neural network, the MANN archi-
tecture (Zhang et al., 2018) using DeepPhase (Starke
et al., 2022) to label the data with locomotion phases.
The other neural controller is from the Learned Mo-
tion Matching paper (Holden et al., 2020). The fol-
lowing sections provide more implementation details
for these models.
4.2.1 Phase-Based Neural Controller
We implemented a phase-based neural controller us-
ing the previously mentioned models. This neural
controller takes as input the current trajectory, charac-
ter pose, and phases created using DeepPhase (Starke
et al., 2022). Both trajectories and pose are trans-
formed to root-local space. For the trajectory, we use
positions, velocities, and orientations for 6 timesteps
with stride 10 into the past and future. We use the
same amount of timesteps for the phases but use a
stride of 2. Additionally, our phase space has 5 chan-
nels. The mixture of experts network consists of two
Trajectory Augmentation for Robust Neural Locomotion Controllers
29

Figure 4: Here we see the difference in responsiveness between the phase-based neural controller trained on original dataset
(gray) versus our augmented dataset (blue) for frames 0, 8, 16, 24 and 32. Our model is able to react faster and finish the turn
before the other. The animation was recorded using the identical controller input for both models.
neural networks, the gating network and the motion
prediction network as detailed in (Zhang et al., 2018).
We use a size of 128 for the hidden layer in the gating
network as well as 8 experts. Furthermore, the motion
generation network consists of a size of 512 nodes for
each hidden layer. The input is first normalized be-
fore we forward it through the network. We apply
an L1 loss between the predicted output and ground
truth and train with AdamWR for 250 epochs. Addi-
tionally, we use a foot skating loss with a weight of
0.1 and a bone length loss with a weight of 0.001. We
train with a learning rate of 0.001 and batch size of 32
and apply a dropout of rate 0.3. We use ELU activa-
tion functions everywhere except for a Softmax in the
last layer of the gating network.
4.2.2 Learned Motion Matching
The second neural controller we used for testing
comes from the Learned Motion Matching (LMM)
paper (Holden et al., 2020). We used their implemen-
tation directly and retrained the network on our three
different datasets. For all neural networks, they use
a hidden layer size of 512. The Compressor network
has 5 layers while using ELU activation functions. All
other networks use ReLUs where the Decompressor
has 3 hidden layers, the Stepper 4, and the Projector 6
hidden layers. All networks are trained with RAdam
using 500 000 iterations using an initial learning rate
of 0.001 that decays by 0.99 every 1000 iterations.
5 EVALUATION AND ANALYSIS
We evaluate three aspects of our approach. First, the
dataset balance by measuring and visualizing the tra-
jectory coverage, second and third are the foot skat-
ing and responsiveness using metrics defined below
as well as animations shown in our video. We use two
prerecorded control trajectories to evaluate using the
metrics. Walk only entails forward motion and con-
sists of long smooth curves as well as multiple 180°
turns on the motion path in the shape of a star. The
Strafe dataset includes motion forward, sideways, and
backward both for walking and running with smooth
and tight turns. We additionally evaluated a third test
set for only forward running motion. But the results
are omitted here as they were virtually the same as
with the Walk dataset.
5.1 Trajectory Coverage
The first step to measure the diversity or bias of our
dataset is to look at the trajectory coverage. The
trajectory coverage looks at trajectory positions 30
frames into the future for every frame in the dataset.
We transform the trajectories to be in root-local co-
ordinate space such that for every trajectory the char-
acter stands at position (0, 0) and the root is oriented
towards the positive y-direction or up in 2d coordi-
nates. As we can see in Figure 5 the motion capture
taken from the original LaFan1 dataset has a large bias
towards the front of the character. The backward di-
rection is underrepresented. While the difference in
trajectory length is due to the forward walking and
running speeds being higher than the ones backward,
we see a clear bias in the density of forward trajecto-
ries compared to the rest. This also affected the qual-
ity of the backward motion significantly as the neural
controller showed most artifacts of foot skating in this
direction when using the original dataset.
To further evaluate our approach compared to
recording a user while using motion matching, we
have the user-recorded Manual dataset in Figure 5
showing more trajectories with immediate backward
direction. We posit that it is easier to oversee certain
parts of the motion space when doing the data aug-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
30
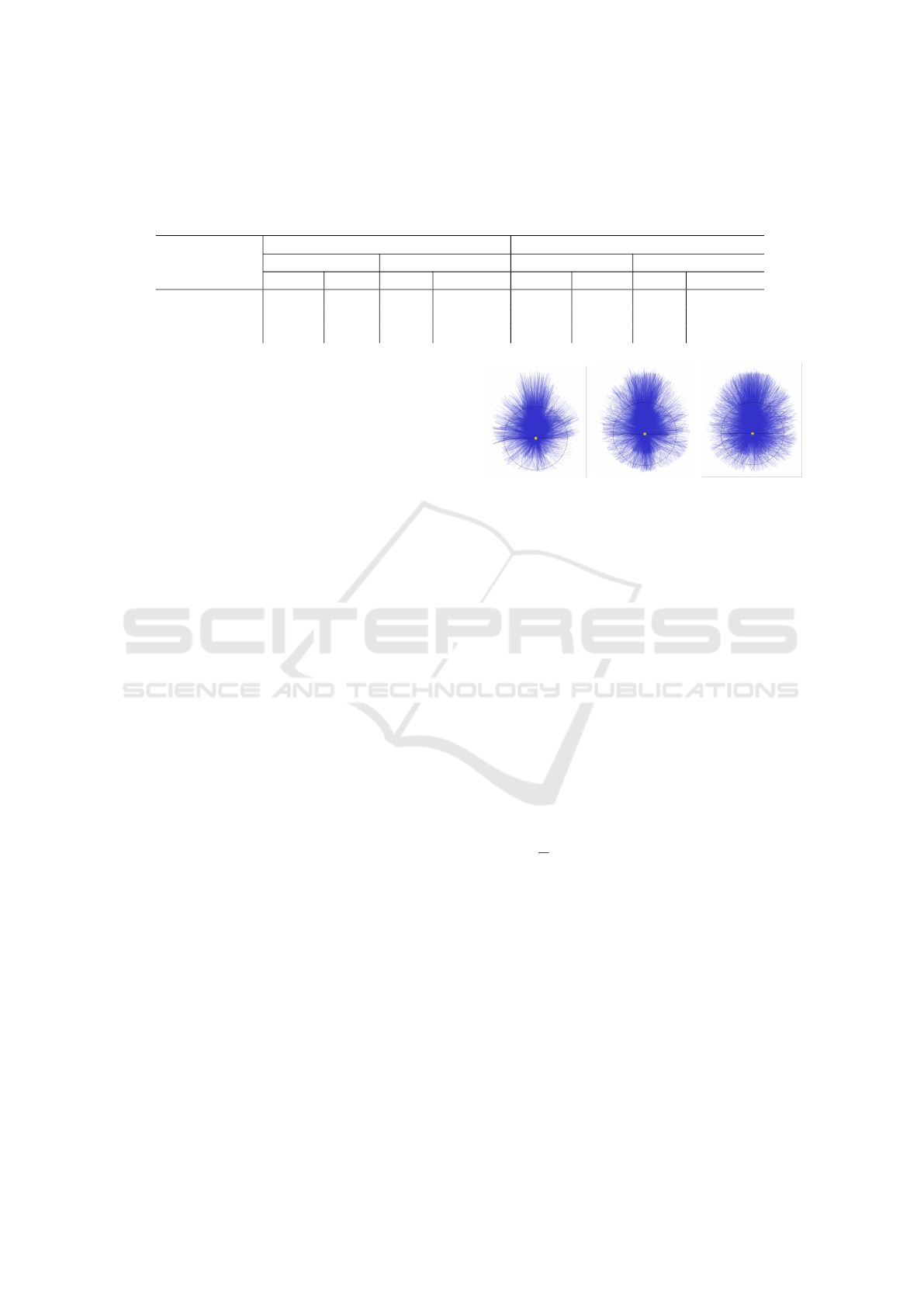
Table 1: Phase-based controller. Shows both foot skating and responsiveness evaluated on the phase-based neural controller
with the MANN architecture and Learned motion matching. For the Phase-based controller, we see similar results in foot
skating and improvements with both recorded and manually curated datasets in responsiveness on the forward walking test
set. However, we achieve significant improvements of up to half for strafing. For Learned Motion Matching controller, we
achieve improvements using our method across all metrics and test sets.
Test Set
Phase-based Controller Learned motion matching
Foot Skating ↓ Responsiveness ↓ Foot Skating ↓ Responsiveness ↓
Walk Strafe Walk Strafe Walk Strafe Walk Strafe
Original 0.0109 0.019 0.530 0.346 0.0051 0.0076 1.121 1.009
Manual 0.0117 0.012 0.406 0.274 0.0043 0.0055 1.091 0.909
TrajAug(ours) 0.0113 0.008 0.424 0.252 0.0039 0.0049 0.988 0.881
mentation manually. Finally, with our fully automatic
TrajAug dataset we have far higher coverage in every
direction.
Trajectory coverage can be seen as the variability
of the trajectories across all possible angles. Quan-
titatively, we measure trajectory coverage by com-
puting the standard deviation of the local trajectory
density. Therefore, a low standard deviation im-
plies uniform coverage while a large standard de-
viation indicates biased coverage. While the orig-
inal dataset reaches a standard deviation of 0.171,
the recorded dataset comes to 0.158, and our Tra-
jAug dataset to 0.154. However, we should also note
that the recorded dataset was specifically built to re-
duce the bias of the original dataset. Additionally, we
composed our TrajAug dataset with a fully balanced
dataset and a dataset biased to forward motion with
standard deviations of 0.045 and 0.314 respectively.
We do this to ensure good results over all possible
motions but preference to forward locomotion as it
represents the most important form of motion in con-
troller applications. Hence our method allows balanc-
ing the dataset while also satisfying curation prefer-
ences based on specialist knowledge.
As we show in our video, MANN especially bene-
fits from a more balanced dataset. It struggles to carry
out any meaningful backwards motion from only the
original dataset. But the models trained on both the
Manual and TrajAug datasets are able to produce
backwards motion.
5.2 Foot Skating
A common artifact with motion controllers is unreal-
istic foot skating in cases where the feet should be in
fixed contact with the ground. Such foot skating often
results in neural controllers due to their smooth nature
which averages poses. Our foot skating metric, FS,
measures how much the joints that can make contact
move while in contact with the floor. We define such
joints j to be in the set J
contact
. However, for our pur-
pose of locomotion, these are only the feet joints. We
(a) Original (b) Manual (c) TrajAug
Figure 5: We randomly sampled 10 000 frames into the
dataset and took the 30 frames into the future for each.
These are transformed to be relative to the character frame
(shown as yellow circle), thus visualizing paths the charac-
ter can take in the dataset. We can observe (a) the original
dataset having less coverage for backward motion than (b)
a manually recorded or (c) an TrajAug augmented dataset
(ours). A perfect circle would represent a completely unbi-
ased dataset.
measure the mean of the sum of velocity magnitudes
∥v∥ for the joints that are currently in contact with the
floor, as shown in Eq. (5). We decide whether or not
a joint is in contact with the floor if its current height
pos
z
is lower than a threshold h. Different joints can
have different thresholds for example the heel joint is
usually placed higher than the toe. For the LaFan1
dataset, we use a height of 2.2cm for the toes and
8.7cm for the heels.
FS =
1
T
T
∑
t=0
∑
j∈J
contact
∥v
j
∥
2
· I[pos
j,z
< h
j
]
!
(5)
Table 1 show the foot skating metrics applied
to both neural controllers with each of the different
datasets for Walk and Strafe motion. Especially us-
ing the Learned Motion Matching controller we see
significant improvement in strafing. In the phase-
based controller, we managed to reduce foot skating
by more than half. Furthermore, we show improve-
ments in walking for the Learned Motion Matching
controller and similar performance with the phase-
based network.
Trajectory Augmentation for Robust Neural Locomotion Controllers
31

5.3 Responsiveness
For interactive applications, and in particular video
games, responsiveness is very important to ensure
a good user experience. To evaluate responsiveness
quantitatively, we recorded controller inputs that hold
multiple tight curves for both walking and strafing.
For each curve in the predefined set C, we measure
the responsiveness, R, which corresponds to the delay
between the apex of the joystick T
J
i
and the apex of
the resulting motion path T
M
i
as defined in:
R =
1
|C|
|C|
∑
i=0
(T
M
i
− T
J
i
), ∀i ∈ C , (6)
Qualitatively, Figure 4 shows how the neural con-
troller trained with our augmented dataset has already
completed its turn about 8 frames early while the neu-
ral controller trained with the original dataset is still
in the middle of the rotation.
Evaluating this metric for the phase-based MANN
architecture on our three datasets in Table 1, we can
see a drop in delay from the original dataset for both
augmented datasets. Interestingly, we see a slight im-
provement in the recorded dataset over ours for walk-
ing with 180° turns in Table 1. After the fact, we ob-
served that our recorded dataset had many such turns
using walking and strafing.
For the Learned Motion Matching neural con-
troller, we observe improvement overall shown in Ta-
ble 1. We think this could be due to the blending oc-
curring in Learned Motion Matching, resulting in less
benefit to responsiveness. For foot skating, we have
seen a high improvement as our data augmentation
balanced the dataset and reduced the number of ex-
trapolation errors.
As the original data already well represents walk-
ing forwards, we see less improvements in Walk mo-
tion across the models and the metrics. In contrast,
the originally worse represented Strafe motion bene-
fits significantly for both models. This further high-
lights the need to balance the datasets used for train-
ing neural controllers.
6 CONCLUSION
We proposed a new trajectory driven data augmenta-
tion technique for Motion Capture data reducing foot
skating and pose blocking artifacts in Neural Loco-
motion Controllers. The resulting dataset further in-
cludes sharper turns and removes undesirable biases
compared to the original mocap making it more suit-
able for in-game locomotion controllers. We evalu-
ated our approach on trajectory coverage, foot skat-
ing, and responsiveness and showed that we obtain
superior results compared to training on only the orig-
inal dataset.
In this work, we focused on locomotion includ-
ing idling, walking, running, and strafing, and we
leave experimenting with other actions and inter-
actions with the scene as future work. Similarly,
we leave experimenting with more random trajectory
generating solutions as future work as this is not the
main novelty of our work. Using our framework to
extrapolate further away from the original dataset may
require replacing motion matching with a more ro-
bust frame sampling method such as (Bergamin et al.,
2019). If different styles are labeled in the data, mo-
tion matching can be easily modified to produce styl-
ized locomotion. We have also witnessed in recent
years motion matching extended for character-scene
interactions in games such as Fifa and Madden (Allen,
2021). Using this interaction framework could help
extend this data augmentation technique beyond lo-
comotion and include more complex motion and in-
teractions.
REFERENCES
Allen, H. (2021). Animation summit: Environmental and
motion matched interactions; ’madden, ’fifa’ and be-
yond!
Bergamin, K., Clavet, S., Holden, D., and Forbes, J. R.
(2019). Drecon: data-driven responsive control of
physics-based characters. ACM Transactions On
Graphics (TOG), 38(6):1–11.
Chin-Cheong, K., Sutter, T., and Vogt, J. E. (2019). Gen-
eration of heterogeneous synthetic electronic health
records using gans. In workshop on machine learning
for health (ML4H) at the 33rd conference on neural
information processing systems (NeurIPS 2019). ETH
Zurich, Institute for Machine Learning.
Clavet, S. and B
¨
uttner, M. (2015). Motion matching -
the road to next gen animation. https://www.youtube.
com/watch?v=z wpgHFSWss&t=658s.
Harrower, G. (2018). Real player motion tech in ’EA sports
UFC 3’.
Harvey, F. G., Yurick, M., Nowrouzezahrai, D., and Pal, C.
(2020). Robust motion in-betweening. 39(4).
Henter, G. E., Alexanderson, S., and Beskow, J. (2020).
Moglow: Probabilistic and controllable motion syn-
thesis using normalising flows. ACM Transactions on
Graphics (TOG), 39(6):1–14.
Holden, D., Kanoun, O., Perepichka, M., and Popa, T.
(2020). Learned motion matching. ACM Transactions
on Graphics (TOG), 39(4):53–1.
Holden, D., Komura, T., and Saito, J. (2017). Phase-
functioned neural networks for character control.
ACM Transactions on Graphics (TOG), 36(4):1–13.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
32

J Qin, Y Zheng, K. Z. (2022). Motion in-betweening via
two-stage transformers. ACM Transactions on Graph-
ics (TOG).
Lee, K., Lee, S., and Lee, J. (2018). Interactive character
animation by learning multi-objective control. ACM
Trans. Graph., 37(6).
Lee, K., Min, S., Lee, S., and Lee, J. (2021). Learning
time-critical responses for interactive character con-
trol. ACM Trans. Graph., 40(4).
Li, B., Hou, Y., and Che, W. (2022). Data augmentation
approaches in natural language processing: A survey.
Ai Open, 3:71–90.
Ling, H. Y., Zinno, F., Cheng, G., and Van De Panne, M.
(2020). Character controllers using motion vaes. ACM
Transactions on Graphics (TOG), 39(4):40–1.
Peng, X. B., Guo, Y., Halper, L., Levine, S., and Fidler,
S. (2022). Ase: Large-scale reusable adversarial skill
embeddings for physically simulated characters. ACM
Trans. Graph., 41(4).
Ravel, K. (2021). Steering behaviors. https://www.kaspar.
wtf/blog/steering-behaviors.
Rempe, D., Birdal, T., Hertzmann, A., Yang, J., Sridhar, S.,
and Guibas, L. J. (2021). Humor: 3d human motion
model for robust pose estimation. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision (ICCV), pages 11488–11499.
Starke, S., Mason, I., and Komura, T. (2022). Deep-
phase: periodic autoencoders for learning motion
phase manifolds. ACM Transactions on Graphics
(TOG), 41(4):1–13.
Starke, S., Zhang, H., Komura, T., and Saito, J. (2019).
Neural state machine for character-scene interactions.
ACM Trans. Graph., 38(6):209–1.
Starke, S., Zhao, Y., Komura, T., and Zaman, K. (2020). Lo-
cal motion phases for learning multi-contact character
movements. ACM Transactions on Graphics (TOG),
39(4):54–1.
Tang, X., Wang, H., Hu, B., Gong, X., Yi, R., Kou, Q., and
Jin, X. (2022). Real-time controllable motion transi-
tion for characters. SIGGRAPH 2022.
Tang, X., Wu, L., Wang, H., Hu, B., Gong, X., Liao, Y.,
Li, S., Kou, Q., and Jin, X. (2023). Rsmt: Real-time
stylized motion transition for characters. SIGGRAPH
2023.
Yao, H., Song, Z., Chen, B., and Liu, L. (2022). Con-
trolvae: Model-based learning of generative con-
trollers for physics-based characters. ACM Transac-
tions on Graphics (TOG), 41(6):1–16.
Zhang, H., Starke, S., Komura, T., and Saito, J. (2018).
Mode-adaptive neural networks for quadruped mo-
tion control. ACM Transactions on Graphics (TOG),
37(4):1–11.
Trajectory Augmentation for Robust Neural Locomotion Controllers
33
