
Interactively Teaching an Inverse Reinforcement Learner with Limited
Feedback
Rustam Zayanov
a
, Francisco S. Melo
b
and Manuel Lopes
c
INESC-ID & Instituto Superior T
´
ecnico, Universidade de Lisboa, Portugal
Keywords:
Sequential Decision Processes, Inverse Reinforcement Learning, Machine Teaching, Interactive Teaching and
Learning.
Abstract:
We study the problem of teaching via demonstrations in sequential decision-making tasks. In particular, we
focus on the situation when the teacher has no access to the learner’s model and policy, and the feedback from
the learner is limited to trajectories that start from states selected by the teacher. The necessity to select the
starting states and infer the learner’s policy creates an opportunity for using the methods of inverse reinforce-
ment learning and active learning by the teacher. In this work, we formalize the teaching process with limited
feedback and propose an algorithm that solves this teaching problem. The algorithm uses a modified version
of the active value-at-risk method to select the starting states, a modified maximum causal entropy algorithm
to infer the policy, and the difficulty score ratio method to choose the teaching demonstrations. We test the
algorithm in a synthetic car driving environment and conclude that the proposed algorithm is an effective so-
lution when the learner’s feedback is limited.
1 INTRODUCTION
Machine Teaching (MT) is a computer science field
that formally studies a learning process from a
teacher’s point of view. The teacher’s goal is to teach
a target concept to a learner by demonstrating an op-
timal (often the shortest) sequence of examples. MT
has the potential to be applied to a wide range of prac-
tical problems (Zhu, 2015; Zhu et al., 2018), such
as: developing better Intelligent Tutoring Systems for
automated teaching for humans, developing smarter
learning algorithms for robots, determining the teach-
ability of various concept classes, testing the validity
of human cognitive models, and cybersecurity.
One promising application domain of MT is the
automated teaching of sequential decision skills to
human learners, such as piloting an airplane or per-
forming a surgical operation. In this domain, MT can
be combined with the theory of Inverse Reinforce-
ment Learning (IRL) (Ng et al., 2000; Abbeel and Ng,
2004), also known as Inverse Optimal Control. IRL
formally studies algorithms for inferring an agent’s
goal based on its observed behavior in a sequential de-
cision setting. Assuming that a learner will use a spe-
a
https://orcid.org/0009-0006-5301-6382
b
https://orcid.org/0000-0001-5705-7372
c
https://orcid.org/0000-0002-6238-8974
cific IRL algorithm to process the teacher’s demon-
strations, the teacher could pick an optimal demon-
stration sequence for that algorithm.
Most MT algorithms assume that the teacher
knows the learner’s model, that is, the learner’s al-
gorithm of processing demonstrations and converting
them into knowledge about the target concept. In the
case of human cognition, formalizing and verifying
such learner models is still an open research ques-
tion. The scarcity of such models poses a challenge to
the application of MT to automated human teaching.
One way of alleviating the necessity of a fully defined
learner model is to develop MT algorithms that make
fewer assumptions about the learner. In the sequential
decision-making domain, (Kamalaruban et al., 2019)
and (Yengera et al., 2021) have proposed teaching al-
gorithms that admit some level of uncertainty about
the learner model. In particular, their teaching algo-
rithms assume that the learner’s behavior (policy) is
maximizing some reward function, but it is unknown
how the learner updates that reward function given the
teacher’s demonstrations. To cope with this uncer-
tainty, the teacher is allowed to observe the learner’s
behavior during the teaching process and infer the
learner’s policy from the observed trajectories, thus
making the process iterative and interactive.
Both works assume that the teacher can period-
Zayanov, R., Melo, F. and Lopes, M.
Interactively Teaching an Inverse Reinforcement Learner with Limited Feedback.
DOI: 10.5220/0012296800003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 15-24
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
15

ically observe many learner’s trajectories from every
initial state and thus estimate the learner’s policy with
high precision. Unfortunately, the need to produce
many trajectories from every initial state may be un-
feasible in real-life scenarios. In our present work, we
address a more realistic scenario in which the feed-
back from the learner is limited to just one trajec-
tory per each iteration of the teaching process. The
limit on the learner’s feedback poses a challenge for
the teacher in reliably estimating the learner’s policy,
which, in turn, may diminish the usefulness of the
teacher’s demonstrations. Thus, our research ques-
tion is: What are the effective ways of teaching an
inverse reinforcement learner when the learner’s
policy and update algorithm are unknown, and the
learner’s feedback is limited?
The teacher’s ability to precisely estimate the
learner’s policy greatly depends on the informative-
ness of the received trajectories. We consider two
scenarios: an unfavorable scenario when the teacher
has no influence on what trajectories it will receive,
and a more favorable scenario when the teacher can
choose the states from which the learner will generate
trajectories. The necessity to select the starting states
creates an opportunity for the teacher to use methods
of Active Learning (AL) (Settles, 2009). In the con-
text of sequential decision-making, AL considers sit-
uations when a learner has to infer an expert’s reward
and can interactively choose the states from which
the expert’s demonstrations should start (Lopes et al.,
2009).
The contribution of our work is two-fold. Firstly,
we propose a new framework that formalizes interac-
tive teaching when the learner’s feedback is limited.
Secondly, we propose an algorithm for teaching with
limited feedback. The algorithm performs three steps
per every teaching iteration: selection of a query state
(AL problem), inference of the current learner’s pol-
icy (IRL problem), and selection of a teaching demon-
stration (MT problem). The algorithm uses a modi-
fied version of the Active-VaR (Brown et al., 2018)
method for choosing query states, a modified ver-
sion of the Maximum Causal Entropy (MCE) (Ziebart
et al., 2013) method for inferring the learner’s policy,
and the difficulty score ratio (DSR) (Yengera et al.,
2021) method for selecting the teaching demonstra-
tion We test the algorithm in a synthetic car driving
environment and conclude that it is a viable solution
when the learner’s feedback is limited
1
.
1
The implementation of the algorithms is available at
https://github.com/rzayanov/irl-teaching-limited-feedback
2 RELATED WORK
(Liu et al., 2017) explore the problem of MT with un-
limited feedback in the domain of supervised learning
when the teacher and the learner represent the target
concept as a linear model. They consider a teacher
that does not know the feature representation and the
parameter of the learner. For this scenario, they in-
troduce an interaction protocol with unlimited learner
feedback, where the teacher can query the learner at
every step by sending all possible examples and re-
ceiving all learner’s output labels. (Liu et al., 2018)
continue this work and explore teaching with lim-
ited feedback in the same supervised learning setting.
Similarly to our work, the teacher can not request all
learner’s labels at every step but instead has to choose
which examples to query using an AL method.
(Melo et al., 2018) explore how interaction can
help when the teacher has wrong assumptions about
the learner. The authors focus on the problem of
teaching the learners that aim to estimate the mean
of a Gaussian distribution given scalar examples.
When the teacher knows the correct learner model,
the teaching goal is achieved after showing one ex-
ample. When it has wrong assumptions, and no in-
teraction is allowed, the learner approaches the cor-
rect mean only asymptotically. When interaction is
allowed, the teacher can query the learner at any time,
and the learner responds with the value of its current
estimate perturbed by noise. They show that this kind
of interaction significantly boosts teaching progress.
(Cakmak and Lopes, 2012) and (Brown and
Niekum, 2019) propose non-interactive MT algo-
rithms for sequential decision-making tasks. Both
algorithms produce a minimal set of demonstrations
that is sufficient to reliably infer the reward func-
tion. Both algorithms are agnostic of the learner
model and don’t specify the order of demonstrations,
which might be crucial for teaching performance if
the learner is not capable of processing the whole set
at once. The algorithm of (Cakmak and Lopes, 2012)
is based on the assumptions that the reward is a lin-
ear combination of state features and that the teacher
will provide enough demonstrations for the learner
to estimate the teacher’s expected feature counts re-
liably. With these assumptions, each demonstrated
state-action pair induces a half-space constraint on
the reward weight vector. Assuming that the learner
weights are bounded, it is possible to estimate the
volume of the subspace defined by any set of such
constraints. A smaller volume means less uncertainty
regarding the true weight vector. Thus, demonstra-
tions that minimize the subspace volume are pre-
ferred. The authors propose a non-interactive algo-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
16

rithm for choosing the demonstration set: at every
step, the teacher will pick a demonstration that min-
imizes the resulting subspace volume. (Brown and
Niekum, 2019) propose an improved non-interactive
MT algorithm called Set Cover Optimal Teaching
(SCOT). They first define a policy’s behavioral equiv-
alence class (BEC) as a set of reward weights under
which that policy is optimal. A BEC of a demon-
stration given a policy is the intersection of half-
spaces formed by all state-action pairs present in
such demonstration. The authors propose finding the
smallest set of demonstrations whose BEC is equal
to the BEC of the optimal policy. Finding such a
set is a set-cover problem. The proposed algorithm
is based on generating m demonstrations from each
starting state and using a greedy method of picking
candidates.
(Kamalaruban et al., 2019) and (Yengera et al.,
2021) propose interactive MT algorithms for sequen-
tial decision-making tasks when the learner can pro-
cess only one demonstration at a time, but the feed-
back from the learner is unlimited or has a high limit.
(Kamalaruban et al., 2019) first consider an omni-
scient teacher whose goal is to steer the learner toward
the optimal weight parameter and find an effective
teaching algorithm. Next, they consider a less infor-
mative teacher that can not observe the learner’s pol-
icy and has no information about the learner’s feature
representations and the update algorithm. Instead of
directly observing the current learner’s policy π
L
i
, the
teacher can periodically request the learner to gener-
ate k trajectories from every initial state, thus estimat-
ing π
L
i
. The limitation of this approach is that the ne-
cessity to produce trajectories from every initial state
may be hard to implement in practice when k is high
or the number of initial states is high. (Yengera et al.,
2021) further explore the problem of teaching with
unlimited feedback and propose the difficulty score
ratio (DSR) algorithm.
They introduce the notion of a difficulty score of a
trajectory given a policy, which is proportional to its
conditional likelihood given that policy, and propose a
teaching algorithm that selects a trajectory that maxi-
mizes the ratio of difficulty scores of the learner’s pol-
icy and the target policy.
To the best of our knowledge, the problem of
teaching with limited feedback in the domain of se-
quential decision-making tasks has not yet been ad-
dressed in the literature.
3 PROBLEM FORMALISM
The underlying task to be solved by an agent is
formally represented as a Markov Decision Process
(MDP) denoted as M = (S , A, T, P
0
, γ, R
⋆
), where S
is the set of states, A is the set of actions, T(S
′
| s, a)
is the state transition probability upon taking action a
in state s, P
0
(S) is the initial state distribution, γ is the
discount factor, and R
⋆
: S → R is the reward function
to be learned.
A stationary policy is a mapping π that maps each
state s ∈ S into a probability distribution π(· | s) over
A. A policy can be executed in M, which will pro-
duce a sequence of state-action pairs called trajectory.
For any trajectory ξ = {s
0
, a
0
, . . . , s
T
, a
T
}, we will de-
note its i-th state and action as s
ξ
i
and a
ξ
i
, respectively.
Given a policy π, the state-value function V
π
(s), the
expected policy value V
π
, and the Q-value function
Q
π
(s, a) are defined as follows respectively:
V
π
(s) = E
"
∞
∑
t=0
γ
t
R(S
t
) | π, T, S
0
= s
#
(1)
V
π
= E
S∼P
0
[V
π
(S)] (2)
Q
π
(s, a) = R(s) + γE
S∼T(·|s,a)
[V
π
(S)] (3)
A policy π
⋆
is considered optimal if it has the highest
state-values for every state. For any MDP, at least
one optimal policy exists, which can be obtained via
the policy iteration method (Sutton and Barto, 2018).
4 FRAMEWORK FOR TEACHING
WITH LIMITED FEEDBACK
In this section, we present our contributions: the
framework for teaching with limited feedback and an
algorithm for solving the problem of teaching with
limited feedback.
We consider two entities that can execute policies
on M: a teacher with complete access to M and a
learner that can access all elements of M except the
reward function, which we denote as M \ R
⋆
. The
teacher and the learner can interact with each other it-
eratively, with every iteration consisting of five steps
described in Algorithm 1. In the first step, the teacher
chooses a query state s
q
i
and asks the learner to gen-
erate a trajectory starting from s
q
i
. We assume that the
query states can only be selected from the set of initial
states, i.e., s
q
i
∈ S
0
= {s : P
0
(s) > 0}. In the second
step, the learner generates a trajectory ξ
L
i
by execut-
ing its policy starting from s
q
i
and sends it back to the
teacher. In the third step, the teacher uses the learner’s
trajectory to update its estimate of the learner’s cur-
rent reward
ˆ
R
L
i
and policy
ˆ
π
L
i
. In the fourth step, the
Interactively Teaching an Inverse Reinforcement Learner with Limited Feedback
17

teacher demonstrates the optimal behavior by gener-
ating a trajectory ξ
T
i
, which we call a demonstration,
and sending it to the learner. In the last step, the
learner learns from the demonstration to update its re-
ward R
L
i
and policy π
L
i
. The teaching process is termi-
nated when the teaching goal is achieved, in the sense
defined below.
Algorithm 1: Framework for teaching with limited
feedback.
1: for i = 1, . . . , ∞ do
2: Teacher sends a query state s
q
i
and requests a
trajectory starting from it
3: Learner generates and sends a trajectory ξ
L
i
4: Teacher updates its estimate of the learner’s
reward
ˆ
R
L
i
and policy
ˆ
π
L
i
5: Teacher generates and sends a demonstration
ξ
T
i
6: Learner updates its reward R
L
i
and policy π
L
i
7: Stop if the teaching goal is achieved
8: end for
We consider the problem described above from
the perspective of a teacher that has limited knowl-
edge about the learner. We consider the following set
of assumptions:
• Access to State Features: Both the teacher and
the learner can observe the same d numerical fea-
tures associated with every state, formalized as a
mapping φ : S → R
d
. The (discounted) feature
counts are defined for a trajectory ξ or for a policy
π and a state s as follows:
µ(ξ) =
∑
t
γ
t
φ(s
t
) (4)
µ(π, s) = E
∑
t
γ
t
φ(S
t
) | π, S
0
= s
(5)
• Rationality: At every iteration, the learner main-
tains some reward mapping R
L
i
and derives a sta-
tionary policy π
L
i
that is appropriate for R
L
i
, which
it uses to generate trajectories. The exact method
of deriving π
L
i
from R
L
i
is unknown to the teacher.
• Reward as a Function of Features: As it is com-
mon in the IRL literature, the learner represents
the reward as a linear function of state features:
R
L
i
(s) = ⟨θ
i
, φ(s)⟩, where the vector θ
i
is called the
feature weights. Furthermore, we assume that the
true reward R
⋆
can be expressed as a function of
these features, i.e., ∃θ
⋆
s.t. ∀s, R
⋆
(s) = ⟨θ
⋆
, φ(s)⟩.
• Learning from Demonstrations: Upon receiv-
ing a demonstration ξ
T
i
, the learner uses it to up-
date its parameter θ
i+1
and thus its reward R
L
i+1
.
Active
Learning
Inverse
Reinforcement
Learning
Demonstration ξ
T
i
Machine
Teaching
Query state s
q
i
Trajectory ξ
L
i
Learner's policy
estimate π̂
L
i
Teacher Learner
Policy
Learning
algorithm
Data from
previous
iterations
Figure 1: The teaching algorithm can be divided into three
modules, each solving AL, IRL, or MT problem at every
iteration. This diagram shows the inputs and outputs of the
modules.
The exact method of updating θ
i+1
from ξ
T
i
is un-
known to the teacher.
There are different ways of evaluating the
teacher’s performance. In general, some notion of nu-
merical loss L
i
is defined for every step (also called
the teaching risk), and the teacher’s goal is related to
the progression of that loss. Similarly to the previous
works, we will use a common definition of the loss as
the expected value difference (EVD): L
i
= V
π
⋆
−V
ˆ
π
L
i
(Abbeel and Ng, 2004; Ziebart, 2010), when evalu-
ated against the real reward R
⋆
, and define the teach-
ing goal as achieving a certain loss threshold ε in the
lowest number of iterations.
Since the teacher has no access to π
L
i
, it has to
infer it from the trajectories received during teach-
ing, which corresponds to the problem of Inverse Re-
inforcement Learning. To infer π
L
i
effectively, the
teacher has to pick the query states with the highest
potential of yielding an informative learner trajectory,
which corresponds to the problem of Active Learn-
ing. Finally, to achieve the ultimate goal of improving
the learner’s policy value, the teacher must select the
most informative demonstrations to send, which cor-
responds to the problem of Machine Teaching. Since
a teaching algorithm has to solve these three problems
sequentially, it can be divided into three “modules”,
each module solving one problem. Figure 1 shows
the inputs and outputs of these modules.
We propose a concrete implementation of such
a teaching algorithm, which we call Teaching with
Limited Feedback (TLimF). It is formally described
in Algorithm 2. In the AL module, it uses the
Interactive-Value-at-Risk (VaR) algorithm, which is
a version of the Active-VaR algorithm (Brown and
Niekum, 2019) that we adapted to teaching with lim-
ited feedback. In the IRL module, TLimF uses the
Interactive-MCE algorithm, which is our adapted ver-
sion of the MCE-IRL algorithm (Ziebart et al., 2013).
Finally, in the MT module, it uses the DSR algorithm
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
18

(Yengera et al., 2021). We describe all these three al-
gorithms below.
Algorithm 2: Teaching with Limited Feedback
(TLimF).
1: for i = 1, . . . , ∞ do
2:
3: s
q
i
= Interactive-VaR(ξ
L
1
, . . . , ξ
L
i
,
ˆ
π
L
i−1
) ▷ AL
step
4: Send s
q
i
to the learner, receive ξ
L
i
5:
6:
ˆ
π
L
i
= Interactive-MCE(ξ
L
i
,
ˆ
θ
L
i−1
) ▷ IRL step
7:
8: ξ
T
i
= DSR(
ˆ
π
L
i
) ▷ MT step
9: Send ξ
T
i
to the learner
10:
11: Stop if V
π
⋆
− V
π
L
i
< ε
12: end for
4.1 Interactive-MCE
Our algorithm for the IRL module, Interactive-MCE,
is based on the MCE-IRL algorithm proposed by
(Ziebart et al., 2013).
The original algorithm searches for a solution in
the class MCE policies,
π
θ
(a | s) = exp[βQ
soft
(s, a) − βV
soft
(s)], (6)
Q
soft
(s, a) = ⟨θ, φ(s)⟩+γE
S∼T(·|s,a)
[V
soft
(S)], (7)
V
soft
(s) =
1
β
log
∑
a
′
∈A
exp[βQ
soft
(s, a
′
)], (8)
where β is the entropy factor. For any θ, the
corresponding MCE policy can be found with the
soft-value iteration method (Ziebart, 2010). The
MCE-IRL algorithm looks for a parameter θ and a
policy π
θ
that has the highest likelihood of producing
the observed set of trajectories Ξ, which is a convex
problem when the reward is linear. It can be solved
with the gradient ascent method, with the gradient
equal to
∇L(θ) =
1
|Ξ|
∑
ξ
(µ(ξ) − µ(π
θ
, s
ξ
0
)). (9)
The original MCE-IRL algorithm assumes that all
the available trajectories were generated by a constant
policy that is based on a constant reward function.
However, in our situation, the trajectories received
from the learner are generated by different policies
based on different rewards since the learner is as-
sumed to update its reward function after receiving
every teacher demonstration. Thus, using all trajec-
tories simultaneously with the MCE-IRL algorithm
might infer a reward that is very different from the
actual learner’s reward.
We propose a sequential version of this algorithm.
At every interaction step i, this algorithm starts with
the previously inferred weights
ˆ
θ
i−1
and applies the
MCE gradient ascent with only the new trajectory ξ
i
as the evidence. Unlike a similar algorithm used by
the MCE learner in (Kamalaruban et al., 2019), which
performs only one MCE iteration per each new tra-
jectory, our variant performs the gradient ascent for
many iterations to better utilize the knowledge con-
tained in the trajectories. If the learner’s trajectories
are short, this method might overfit to the actions ob-
served in the latest trajectory. To avoid that, the older
trajectories could be included in the gradient update,
possibly with lower weight, or the feedback might
have to be increased to a higher number of trajectories
per iteration. Interactive-MCE is formally described
in Algorithm 3.
Algorithm 3: Interactive-MCE.
Require: trajectory ξ
i
, previous or initial estimate
ˆ
θ
i−1
1: s
0
= First-State(ξ
i
)
2:
ˆ
θ
i
=
ˆ
θ
i−1
3:
ˆ
π
i
= Soft-Value-Iter(
ˆ
θ
i
)
4: for n = 1, . . . , N do
5:
ˆ
θ
i
=
ˆ
θ
i
+ η
n
(µ
ξ
i
− µ
ˆ
π
i
,s
0
)
6:
ˆ
π
i
= Soft-Value-Iter(
ˆ
θ
i
)
7: end for
8: return
ˆ
θ
i
,
ˆ
π
i
4.2 Interactive-VaR
Our algorithm for the AL module, Interactive-VaR,
is based on the Active-VaR algorithm proposed by
(Brown and Niekum, 2019).
The original algorithm assumes that the MDP is
deterministic, the reward weights lie on an L1-norm
unit sphere, and the expert is following a constant
parametrized softmax policy,
π
θ
(a | s) =
exp[cQ
θ
(s, a)]
∑
a
′
∈A
exp[cQ
θ
(s, a
′
)]
, (10)
where c is a known confidence factor and Q
θ
are the
Q-values of an optimal policy for θ. For any reward
weights θ on the L1-norm unit sphere, the probability
of observing the given set of trajectories Ξ is
P(Ξ | θ) =
1
Z
exp
"
∑
ξ∈Ξ
∑
t
cQ
θ
(s
ξ
t
, a
ξ
t
)
#
, (11)
Interactively Teaching an Inverse Reinforcement Learner with Limited Feedback
19

where Z is a normalizing constant. If the apriori dis-
tribution of θ is unknown, the probability of the given
weights θ generating the observed trajectories is
P(θ | Ξ) =
1
Z
′
P(Ξ | θ). (12)
For any policy π, weights θ and starting state s, the
expected value difference (EVD) of π is defined as
EVD(θ | π, s) = V
π
(s) − V
π
θ
(s). (13)
The Active-VaR method proposes to choose the next
query state s
q
i
by finding the state that has the max-
imum VaR of EVD of the previously inferred policy
ˆ
π
i−1
:
s
q
i
= argmax
s∈S
0
VaR[EVD(θ |
ˆ
π
i−1
, s)] (14)
The original Active-VaR algorithm is not well-
suited for the problem in question because the obser-
vations were generated by different learner policies,
each corresponding to a different reward. One way of
addressing this problem is to give less weight to the
older observations when computing the likelihood of
any θ:
P(θ | ξ
L
1
, . . . , ξ
L
k
) ≈
1
Z
k
∏
i=1
P(ξ
L
i
| θ)
λ
i
(15)
λ
k
= 1 (16)
lim
i→−∞
λ
i
= 0 (17)
In particular, it is possible to consider only the last n
observations,
P(θ | ξ
L
1
, . . . , ξ
L
k
) ≈
1
Z
k
∏
i=(k−n)
+
P(ξ
L
i
| θ) (18)
or to have the weight decay exponentially,
P(θ | ξ
L
1
, . . . , ξ
L
k
) ≈
1
Z
k
∏
i=1
P(ξ
L
i
| θ)
λ
k−i
, λ < 1. (19)
An additional advantage of the exponential decay is
computational speed because after receiving a new
trajectory, it is possible to compute the updated likeli-
hoods by reusing the likelihoods computed in the pre-
vious iteration:
k
∏
i=1
P(ξ
L
i
| θ)
λ
k−i
= P
k
= P
λ
k−1
P(ξ
L
i
| θ). (20)
To avoid using several policy classes within the
compound teaching algorithm, we assume that the
learner follows an MCE policy instead of a softmax
policy. Given that, firstly, we use the soft Q-values of
the MCE policy to calculate the demonstration prob-
abilities:
P(ξ|θ) =
1
Z
exp
∑
t
Q
soft
(s
t
, a
t
)
(21)
Secondly, for calculating VaR, we use the differ-
ence of the expected soft values: Soft-EVD(θ|π, s) =
V
soft,π
(s) − V
soft,π
θ
(s). Finally, we replace the as-
sumption about the known softmax confidence factor
c with a similar assumption about the known MCE
entropy factor β.
Interactive-MCE is formally described in Algo-
rithm 4.
Algorithm 4: Interactive Value-at-Risk (Interactive-
VaR).
Require: previous trajectories ξ
1
, . . . , ξ
i
, previous or
initial estimate
ˆ
π
L
i−1
1: if i = 1 then
2: Pick a random initial state s
q
i
∈ S
0
3: else
4: Sample reward weights Θ
5: s
q
i
= argmax
s∈S
0
VaR[Soft-EVD(Θ |
ˆ
π
L
i−1
, s)]
6: end if
7: return s
q
i
4.3 Difficulty Score Ratio
For deterministic MDPs, the difficulty score of a
demonstration ξ w.r.t. a policy π is defined as
Ψ(ξ) =
1
∏
t
π(a
t
| s
t
)
(22)
The DSR algorithm selects the next teacher’s demon-
stration ξ
T
i
by iterating over a pool of candidate trajec-
tories Ξ and finding the trajectory with the maximum
difficulty score ratio. DSR is formally described in
Algorithm 5.
Algorithm 5: Difficulty Score Ratio (DSR).
Require: Policy estimate
ˆ
π
L
i
1: for ξ in candidate pool Ξ do
2:
ˆ
Ψ
L
i
(ξ) =
∏
t
ˆ
π
L
i
(a
ξ
t
| s
ξ
t
)
−1
3: Ψ
T
(ξ) =
∏
t
π
⋆
(a
ξ
t
| s
ξ
t
)
−1
4: end for
5: ξ
T
i
= argmax
ξ∈Ξ
ˆ
Ψ
L
i
(ξ)
Ψ
T
(ξ)
6: return ξ
T
i
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
20

Stone
Grass
Car
Pedestrian
HOV
Police
T0 T1 T2 T3 T4 T 5 T6 T7
Figure 2: Examples of each road type of the car environ-
ment. Each 2 × 10 grid represents a road. The agent starts
at the bottom left corner of a randomly selected road. After
the agent has advanced for 10 steps upwards along the road,
the MDP is terminated.
5 EXPERIMENTAL EVALUATION
We tested our teaching algorithm in the synthetic
car driving environment proposed by (Kamalaruban
et al., 2019). The environment consists of 40 isolated
roads, each road having two lanes. The agent repre-
sents a car that is driving along one of the roads. The
road is selected randomly at the start of the decision
process, and the process terminates when the agent
has reached the end of the road. There are eight road
types, with five roads of each type. The road types,
which we refer to as T0-T7, represent various driving
conditions:
• T0 roads are mostly empty and have a few other
cars.
• T1 roads are more congested and have many other
cars.
• T2 roads have stones on the right lane, which
should be avoided.
• T3 roads have cars and stones placed randomly.
• T4 roads have grass on the right lane, which
should be avoided.
• T5 roads have cars and grass placed randomly.
• T6 roads have grass on the right lane and pedes-
trians placed randomly, both of which should be
avoided.
• T7 roads have a high-occupancy vehicle (HOV)
lane on the right and police at certain locations.
Driving on a HOV lane is preferred, whereas the
police is neutral.
Each road is represented as a 2 × 10 grid. We assume
without loss of generality that only the agent is mov-
ing, other objects being static. Roads of the same type
differ in the placement of the random objects. Fig-
ure 2 demonstrates example roads of all types.
The agent has three actions at every state: left,
right, and stay. Choosing left moves the agent
Table 1: True feature weights.
Feature Weight
stone -1
grass -0.5
car -5
pedestrian -10
HOV +1
police 0
car-in-front -2
ped-in-front -5
to the left lane if it was on the right lane, otherwise
moves it to a random lane. Choosing right yields
a symmetrical transition. Choosing stay keeps the
agent on the same lane. Regardless of the chosen ac-
tion, the agent always advances along the road. The
environment has 40 possible initial states, each corre-
sponding to the bottom left corner of every road. Af-
ter advancing along the road for ten steps, the MDP is
terminated. We assume γ = 0.99.
For every state, eight binary features are observ-
able. Six of them represent the environment objects:
stone, grass, car, pedestrian, HOV, and police. The
last two indicate whether there’s a car in the next cell
or a pedestrian. We consider the reward to be a linear
function of these binary features, with reward weights
specified in Table 1.
5.1 CrossEnt-BC Learner
We use a linear variant of the Cross-Entropy Be-
havioral Cloning (CrossEnt-BC) learner proposed by
(Yengera et al., 2021) for our experiments. This
learner follows a parametrized softmax policy,
π
CE
i
(a | s) =
exp[H
i
(s, a)]
∑
a
′
∈A
exp[H
i
(s, a
′
)]
, (23)
where H
i
is a parametric scoring function that de-
pends on a parameter θ
L
i
and a constant feature map-
ping,
φ
CE
(s, a) = E
S
′
∼T(·|s,a)
[φ(S
′
)], (24)
and is defined as H
i
(s, a) = ⟨θ
L
i
, φ
CE
(s, a)⟩. The like-
lihood of any demonstration ξ and its gradient are de-
fined respectively as
L(θ
L
i
) = logP(ξ | θ
L
i
), (25)
∇L =
∑
t
φ
CE
(s
ξ
t
, a
ξ
t
) − E
a∼π
CE
i
(·|s
ξ
t
)
h
φ
CE
(s
ξ
t
, a)
i
(26)
This learner starts with random initial weights
θ
L
1
, every element being uniformly sampled from
Interactively Teaching an Inverse Reinforcement Learner with Limited Feedback
21

(−10, 10). Upon receiving a new demonstration ξ
T
i
from the teacher, the learner performs a projected gra-
dient ascent,
θ
L
i+1
= Proj
Θ
θ
L
i
+ η∇L(θ
L
i
)
, (27)
where η = 0.34 and Θ is a hyperball centered at zero
with a radius of 100.
5.2 Teaching Algorithms
We compared the following algorithms, also pre-
sented in Table 2:
• RANDOM teacher does not infer θ
L
i
and selects
demonstrations by choosing a random initial state
and generating an optimal demonstration from
that state. This algorithm was originally proposed
in (Kamalaruban et al., 2019) and serves as the
worst-case baseline.
• NOAL teacher selects query states randomly but
uses MCE to infer the learner reward and DSR
to select demonstrations. We included this algo-
rithm as the second worst-case baseline to verify
whether the usage of an AL algorithm by other
teachers can boost the teaching process.
• UNMOD uses unmodified Active-VaR to select
query states, followed by unmodified MCE-IRL
and DSR. We included this algorithm to ver-
ify whether the changes that we introduced in
Interactive-VaR and Interactive-MCE affect the
performance.
• TLIMF uses Interactive-VaR to select query
states, followed by Interactive-MCE and DSR.
• TUNLIMF teacher knows the exact learner’s pol-
icy at every step and therefore does not need AL
and IRL modules. It uses the DSR algorithm to
select demonstrations. This algorithm was origi-
nally proposed in (Yengera et al., 2021) and serves
as the best-case baseline.
We did not include non-interactive algorithms in
the experiment, because it was shown in (Yengera
et al., 2021) that the state-of-the-art non-interactive
MT algorithm, Set Cover Optimal Teaching, did not
perform better than RANDOM in this environment.
We also did not include the Black-Box (BBox) algo-
rithm of (Kamalaruban et al., 2019) in the compari-
son, because it was shown in (Yengera et al., 2021)
that TUNLIMF has similar performance to BBox and
can be considered an improvement over it.
The Interactive-VaR algorithm samples reward
weights from the L1-norm sphere with a radius equal
to 24, which is the L1-norm of the true feature
weights. The VaR is computed on 5,000 uniformly
sampled weights on the sphere
2
. For computing
the posterior likelihood of θ, the demonstrations are
weighted exponentially with λ = 0.4. The EVD be-
tween the two policies is computed using soft policy
values. The α factor of VaR was set to 0.95. The
MCE algorithms use 100 iterations of the gradient as-
cent. The DSR algorithm selects demonstrations from
a constant pool that consists of 10 randomly sampled
trajectories per road.
5.3 Analysis of the Teacher’s
Performance
We conducted the experiment 16 times with different
random seeds, which affected the random placement
of objects on the roads and the random initial weights
of the learners, and averaged the results of 16 experi-
ments.
Figure 3a displays the ability of the teaching algo-
rithms to accurately estimate the current learner’s pol-
icy. For every iteration step, it shows the loss of the
teacher’s inferred policy
ˆ
π
L
i
w.r.t. the actual learner’s
policy π
L
i
. The thick lines represent the average of 16
experiments, and the thin vertical lines measure the
standard error. As we can see, at any iteration, TLIMF
is able to estimate the learner’s policy more reliably
than NOAL, which means that using an AL algorithm
is crucial for effectively estimating the learner’s pol-
icy. We can also see that UNMOD performs consider-
ably worse than NOAL, which means that unmodified
Active-VaR and MCE-IRL algorithms are not suitable
for teaching with limited feedback. The teacher’s per-
formance in estimating the learner’s policy is an inter-
mediate result that affects the overall teaching perfor-
mance, which is discussed next.
Figure 3b and table 3 display the effectiveness of
the teacher’s effort in teaching the learner. For every
iteration step, figure 3b shows the loss of the learner’s
policy π
L
i
w.r.t. the optimal policy π
⋆
, averaged over
16 experiments. Table 3 shows how many iterations,
on average, the teachers need before reaching various
loss thresholds. As we can see, TLIMF does not attain
the performance of the upper baseline, TUNLIMF, but
it performs considerably better than other teaching al-
gorithms: its loss is consistently lower starting from
the seventh iteration, and it needs considerably fewer
iterations to reach the presented loss thresholds. This
implies that for teaching with limited feedback, the
best performance is achieved when the teacher is us-
ing specialized AL and IRL algorithms to select query
states and infer the learner’s policy. The NOAL
2
Increasing the sample size or sampling with MCMC
yields similar results.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
22
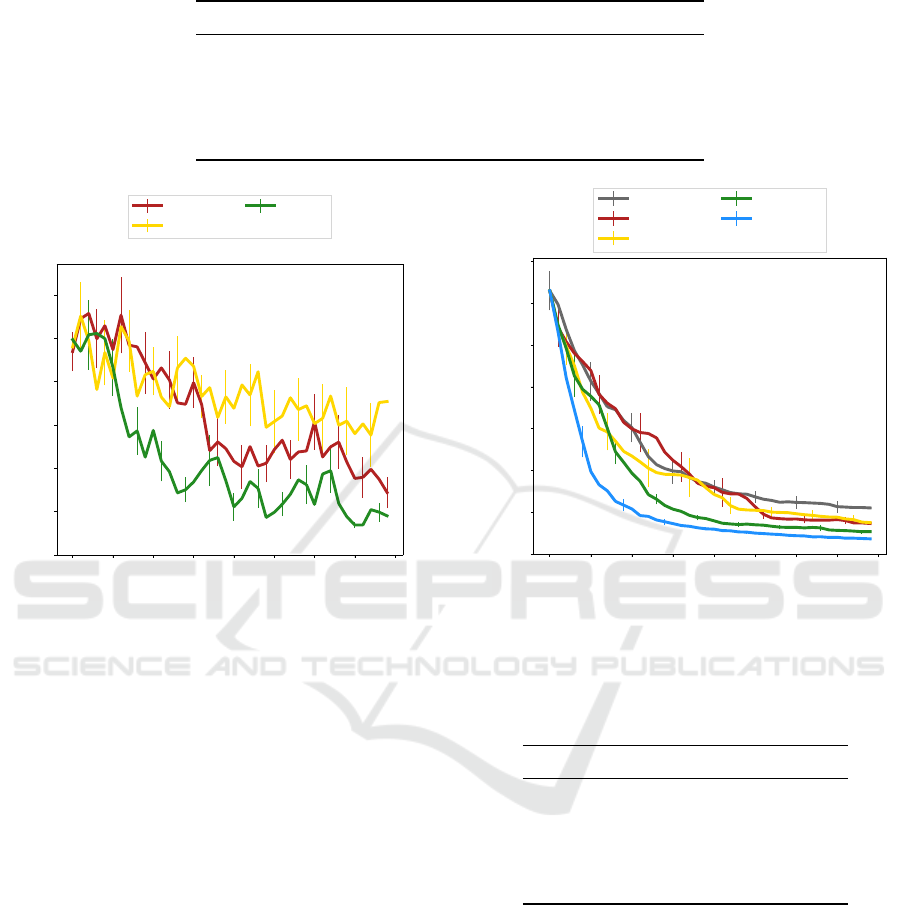
Table 2: Tested algorithms.
Name AL IRL MT
RANDOM - - Random
NOAL Random Interactive-MCE DSR
UNMOD Active-VaR MCE-IRL DSR
TLIMF Interactive-VaR Interactive-MCE DSR
TUNLIMF Not needed Not needed DSR
0 5 10 15 20 25 30 35 40
Iteration
0
2
4
6
8
10
12
Teacher’s loss
NOAL
UNMOD
TLIMF
(a) Teacher’s inferred policy loss.
0 5 10 15 20 25 30 35 40
Iteration
0
1
2
3
4
5
6
7
Learner’s loss
RANDOM
NOAL
UNMOD
TLIMF
TUNLIMF
(b) Learner’s policy loss.
Figure 3: Teaching results are measured as (a) the loss of the teacher’s inferred policy and (b) the loss of the actual learner’s
policy. The thick lines represent the averages of 16 experiments. The thin vertical lines measure the standard error. TLIMF
demonstrates the lowest losses during most of the process, with NOAL and UNMOD significantly lagging behind.
teacher performs worse than TLIMF but better than
the lower baseline, RANDOM: its loss is considerably
lower starting from the 25th iteration, and it needs
fewer iterations to reach the loss thresholds. This im-
plies that teaching without AL is still better than se-
lecting demonstrations randomly. Finally, the perfor-
mance of the teacher with unmodified AL and IRL
algorithms, UNMOD, is high during the first six iter-
ations, but it gradually worsens during the teaching
process and falls below the performance of NOAL.
It also shows significantly low performance at reach-
ing the loss thresholds, needing more iterations than
the random teacher, which implies that modifying the
algorithms was necessary for good performance.
6 SUMMARY AND FUTURE
WORK
We have proposed a teacher-learner interaction frame-
work in which the feedback from the learner is limited
Table 3: Iterations needed to reach a loss threshold ε.
Teacher ε = 2 ε = 1 ε = 0.5
RANDOM 16 36 96
NOAL 13 25 49
UNMOD 31 54 102
TLIMF 8 19 46
TUNLIMF 5 11 27
to just one trajectory per teaching iteration. Such a
framework is closer to real-life situations and more
challenging when compared with the frameworks
used in previous works. In this framework, the teacher
has to solve AL, IRL, and MT problems sequentially
at every teaching iteration. We have proposed a teach-
ing algorithm that consists of three modules, each
dedicated to solving one of these three sub-problems.
This algorithm uses a modified MCE-IRL algorithm
for solving the IRL sub-problem, a modified Active-
VaR algorithm for solving the AL problem, and the
DSR algorithm for solving the MT problem. We have
tested the algorithm on a synthetic car-driving envi-
Interactively Teaching an Inverse Reinforcement Learner with Limited Feedback
23

ronment and compared it with the existing algorithms
and the worst-case baseline. We have concluded that
the new algorithm is effective at solving the teaching
problem.
In future work, it would be interesting to study
such a teacher-learner interaction in more complex
environments. For example, an environment could
have more states and a non-linear reward function
possibly represented as a neural network. Another
question yet to be addressed is the convergence guar-
antees of the proposed algorithms. It is also interest-
ing to check whether the MT module of the algorithm
could be improved by considering the uncertainty of
the estimated learner policy. Another possible direc-
tion of research is finding more sophisticated ways
of weighing older trajectories of the learner. E.g., if
the environment consists of several isolated regions
and any feature is confined to a certain region, then
sending a teaching demonstration in one region might
not change the learner’s behavior in others, therefore
the previous learner’s trajectories from other regions
might not need to be weighed down.
ACKNOWLEDGEMENTS
This work was partially supported by national funds
through Fundac¸
˜
ao para a Ci
ˆ
encia e a Tecnologia,
under project UIDB/50021/2020 (INESC-ID multi-
annual funding) and the RELEvaNT project, with ref-
erence PTDC/CCI-COM/5060/2021.
Rustam Zayanov would also like to thank Open
Philanthropy for their scholarship, which facilitated
his dedicated involvement in this project.
REFERENCES
Abbeel, P. and Ng, A. Y. (2004). Apprenticeship learning
via inverse reinforcement learning. In Proceedings of
the twenty-first international conference on Machine
learning, page 1.
Brown, D. S., Cui, Y., and Niekum, S. (2018). Risk-aware
active inverse reinforcement learning. In Conference
on Robot Learning, pages 362–372. PMLR.
Brown, D. S. and Niekum, S. (2019). Machine teaching for
inverse reinforcement learning: Algorithms and appli-
cations. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 33, pages 7749–7758.
Cakmak, M. and Lopes, M. (2012). Algorithmic and human
teaching of sequential decision tasks. In Twenty-Sixth
AAAI Conference on Artificial Intelligence.
Kamalaruban, P., Devidze, R., Cevher, V., and Singla,
A. (2019). Interactive teaching algorithms for
inverse reinforcement learning. arXiv preprint
arXiv:1905.11867.
Liu, W., Dai, B., Humayun, A., Tay, C., Yu, C., Smith,
L. B., Rehg, J. M., and Song, L. (2017). Iterative ma-
chine teaching. In International Conference on Ma-
chine Learning, pages 2149–2158. PMLR.
Liu, W., Dai, B., Li, X., Liu, Z., Rehg, J., and Song, L.
(2018). Towards black-box iterative machine teach-
ing. In International Conference on Machine Learn-
ing, pages 3141–3149. PMLR.
Lopes, M., Melo, F., and Montesano, L. (2009). Ac-
tive learning for reward estimation in inverse rein-
forcement learning. In Joint European Conference
on Machine Learning and Knowledge Discovery in
Databases, pages 31–46. Springer.
Melo, F. S., Guerra, C., and Lopes, M. (2018). Interactive
optimal teaching with unknown learners. In IJCAI,
pages 2567–2573.
Ng, A. Y., Russell, S., et al. (2000). Algorithms for inverse
reinforcement learning. In Icml, volume 1, page 2.
Settles, B. (2009). Active learning literature survey. Com-
puter Sciences Technical Report 1648, University of
Wisconsin–Madison.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Yengera, G., Devidze, R., Kamalaruban, P., and Singla, A.
(2021). Curriculum design for teaching via demon-
strations: Theory and applications. Advances in
Neural Information Processing Systems, 34:10496–
10509.
Zhu, X. (2015). Machine teaching: An inverse problem
to machine learning and an approach toward optimal
education. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 29.
Zhu, X., Singla, A., Zilles, S., and Rafferty, A. N. (2018).
An overview of machine teaching. arXiv preprint
arXiv:1801.05927.
Ziebart, B. D. (2010). Modeling purposeful adaptive be-
havior with the principle of maximum causal entropy.
Carnegie Mellon University.
Ziebart, B. D., Bagnell, J. A., and Dey, A. K. (2013). The
principle of maximum causal entropy for estimating
interacting processes. IEEE Transactions on Informa-
tion Theory, 59(4):1966–1980.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
24
