
Pedestrian’s Gaze Object Detection in Traffic Scene
Hiroto Murakami
1 a
, Jialei Chen
1
, Daisuke Deguchi
1
,
Takatsugu Hirayama
2,1
, Yasutomo Kawanishi
3,1
and Hiroshi Murase
1
1
Graduate School of Informatics, Nagoya University, Nagoya, Japan
2
Faculty of Environmental Science, University of Human Environments, Okazaki, Japan
3
Multimodal Data Recognition Research Team, Guardian Robot Project, Riken, Kyoto, Japan
Keywords:
Pedestrian’s Gaze Object Detection, Object Detection, Gaze Estimation, Traffic Scene, Dataset.
Abstract:
In this paper, we present a new task of detecting an object that a target pedestrian is gazing at in a traffic scene
called PEdestrian’s Gaze Object (PEGO). We argue that the detection of gaze object can provide important in-
formation for pedestrian’s behavior prediction and can contribute to the realization of automated vehicles. For
this task, we construct a dataset of in-vehicle camera images with annotations of the objects that pedestrians
are gazing at. Also, we propose a Transformer-based method called PEGO Transformer to solve the PEGO
detection task. The PEGO Transformer directly performs gaze object detection with the utilization of whole-
body features without a high-resolution head image and a gaze heatmap which the traditional methods rely
on. Experimental results showed that the proposed method could estimate pedestrian’s gaze object accurately
even if various objects exist in the scene.
1 INTRODUCTION
Detection of PEdestrian’s Gaze Object (PEGO) aims
to detect an object that a pedestrian is gazing at in a
traffic scene. This is an important task for comput-
ers to predict the future behavior of a pedestrian in
a traffic scene. For example, as shown in Fig. 1, a
pedestrian gazes at an oncoming car and will proba-
bly wait until the car passes without jumping out into
the roadway. Thus, the detection result of the gaze
object is an important clue that reveals what behavior
the person intends to take in the future.
For the gaze detection task, several datasets have
been released. Recasens et al. (Recasens et al., 2015)
have released a GazeFollow dataset for gaze detection
in our daily life. This pioneering work demonstrates
the importance of gaze detection tasks in person be-
havior prediction. Tomas et al. (Tomas et al., 2021)
have released a Gaze On Objects (GOO) dataset that
aims to find products that customers are gazing at in
the retail store scene.
Several gaze detection models have been devel-
oped using these datasets. Recasens et al. (Recasens
et al., 2015) have proposed a model to detect line
of sight using the GazeFollow dataset. Wang et
a
https://orcid.org/0009-0008-6571-4721
Figure 1: A pedestrian is gazing at an oncoming vehicle.
al. (Wang et al., 2022) used the GOO dataset and have
proposed a GaTector that detects human’s gazing ob-
jects.
In a traffic scene, pedestrian’s gaze detection is
also essential because it contributes to determining
automated driving behavior and implementing tech-
nologies that alert drivers. Belkada et al. (Belkada
et al., 2021) and Hata et al. (Hata et al., 2022) have
proposed a method for detecting “eye contact”, which
indicates whether a pedestrian is gazing at the in-
vehicle camera. However, they have not been studied
to recognize which objects pedestrians are gazing at
if they are not gazing at the in-vehicle camera.
A dataset plays an important role in achieving
pedestrian’s gaze object detection in traffic scenes.
Various datasets have been released for traffic-scene
Murakami, H., Chen, J., Deguchi, D., Hirayama, T., Kawanishi, Y. and Murase, H.
Pedestrian’s Gaze Object Detection in Traffic Scene.
DOI: 10.5220/0012309500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
333-340
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
333

understanding (Caesar et al., 2020; Sun et al., 2020;
Rasouli et al., 2019; Cordts et al., 2016; Geiger et al.,
2013). However, to the best of our knowledge, there
is no dataset consisting of annotations on pedestrian’s
gaze objects in traffic scenes. Since existing datasets
and methods focus on our daily lives and retail store
scenes, they are different domains and cannot be used
for PEGO detection in traffic scenes.
Therefore, this paper tackles the tasks to detect the
pedestrian’s gaze object: construct a new dataset and
propose a new method. In this dataset, we manually
annotate each pedestrian in an in-vehicle camera im-
age with the pedestrian’s gaze object. In addition, we
propose a method termed PEGO Transformer for de-
tecting the pedestrian’s gaze object using this dataset.
The PEGO Transformer consists of four modules: a
backbone to extract features from the input images, a
Deformable Transformer to capture the features cor-
responding to objects, a Projection Layer to utilize the
features to produce the result for the final prediction,
and a Label Generator to generate the label index for
training the model via loading the dataset.
Contributions of this paper are as follows.
1. This paper proposes a novel PEGO Transformer
that can estimate a gazing object of each pedes-
trian in a traffic scene. The proposed method
is capable of estimation even without the high-
resolution head images or the gaze heatmap re-
quired by conventional methods. The PEGO
Transformer is trained to capture the relationship
between detected objects and pedestrians so that
the likelihood of gaze object for each pedestrian
becomes high.
2. This paper proposes a novel task of PEGO detec-
tion that estimates gaze object of each pedestrian
in the traffic scene. For this task, we construct a
new dataset by extending the widely used traffic
scene dataset.
2 RELATED WORK
2.1 Human’s Gaze Object Detection
Recasens et al. (Recasens et al., 2015) constructed a
gaze detection dataset and proposed a method called
GazeFollow to estimate human gaze. The aim of
their dataset is to estimate the direction of the gaze,
whereas our study aims at detecting the gaze object.
Wang et al. (Wang et al., 2022) and Tu et al. (Tu
et al., 2022; Tu et al., 2023) proposed methods for de-
tecting the gaze object of a target human at the object
level. Wang et al. proposed GaTector, which esti-
mates the products customers are gazing at in a store
scene. The gaze heatmap is estimated using a high-
resolution head image of the target person, and ob-
jects that overlap with the estimated gaze heatmap are
considered the gaze objects. Human-Gaze-Target De-
tection with Transformer (HGTTR) (Tu et al., 2022)
and Gaze following detection Transformer (GTR) (Tu
et al., 2023) proposed by Tu et al. detect human gaze
object in more general scenes. As with GaTector, Tu’s
methods are processed in the head detection branch
and the gaze heatmap detection branch, after which
the gaze object is estimated. However, these methods
rely on high-resolution head images. Most pedestri-
ans captured by in-vehicle cameras are smaller than
those captured in the other scenes due to their dis-
tance and lower image resolution. This makes it diffi-
cult to extract the head features required for estimat-
ing the region of attention by these methods. In addi-
tion, since the gaze target is selected based on the esti-
mated gaze heatmap, the selection accuracy is highly
dependent on the performance of the gaze heatmap
estimator. As a result, our method can estimate the
gaze object without a high-resolution head image by
using the pedestrian’s whole body features. It also es-
timates the gaze object directly without using a gaze
heatmap, that is a performance bottleneck of the pre-
vious methods.
2.2 Pedestrian’s Gaze Target Detection
Belkada et al. (Belkada et al., 2021) and Hata et
al. (Hata et al., 2022) worked on pedestrian eye-
contact detection. They use skeletal information to
detect whether a pedestrian is gazing at the in-vehicle
camera because pedestrians captured by in-vehicle
cameras are often small and blurred, and thus exist-
ing eye gaze detection methods cannot be applied di-
rectly. They also constructed new datasets that can
handle the eye contact detection task by extending an
existing traffic scene dataset. The task addressed in
our study is similar to that addressed by Hata et al. in
terms of focusing on pedestrians captured by an in-
vehicle camera. However, their method cannot rec-
ognize the pedestrian’s gaze object without any eye-
contact.
2.3 Dataset Containing Pedestrians
Datasets recorded in real traffic scenes are beneficial
for automated driving tasks. Caesar et al. (Caesar
et al., 2020) have released nuScenes and nuImages
annotated with bounding boxes and object class la-
bels for object detection. In these datasets, bounding
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
334
Object
Queries
BBox, Class
Generator
PEGO Dataset
Transformer
Encoder
MLP
Cross Entropy
Likelihood as
a gazed object
Projection Layer
Label Generator
Transformer
Encoder
CNN
Backbone
Transformer
Decoder
𝑁×𝐶
PEGO Index
𝑦
Input Image
Deformable
Transformer
𝑁%×%1
Move
Target
Pedestrian
Object Query
Backbone
𝑜
!
𝑜
"
𝑜
#
𝑜
$
𝑜
%
𝑜
&
𝑜
'
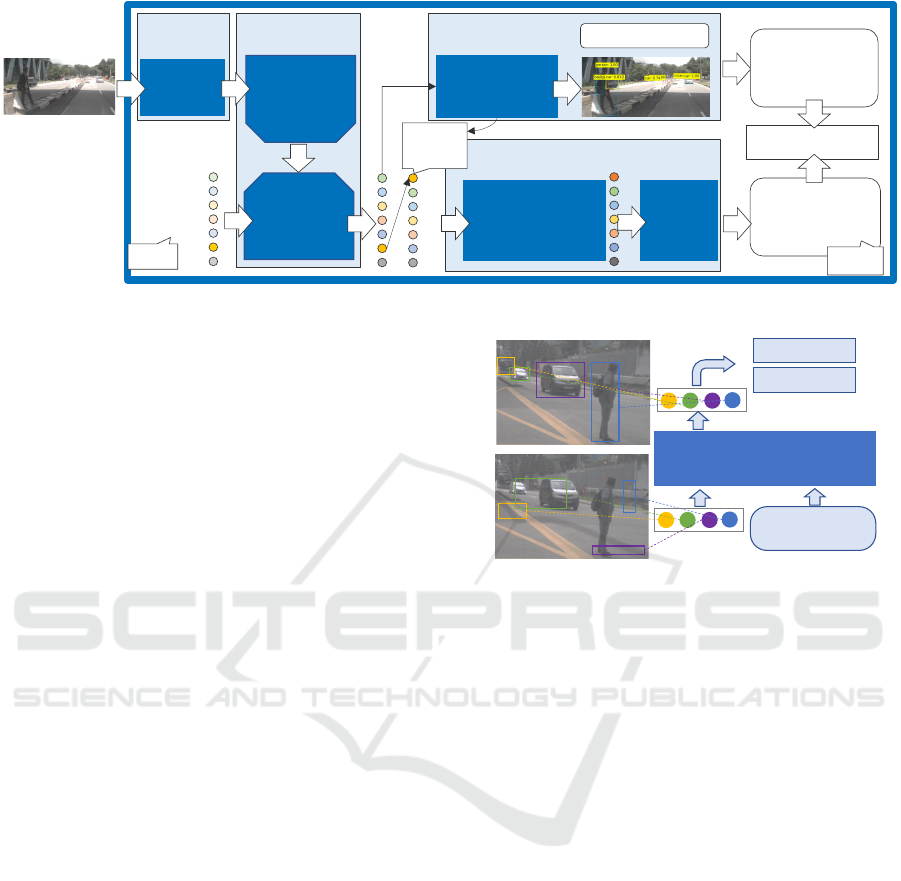
Figure 2: Overview of the PEGO Transformer.
boxes and 23 classes of object labels are annotated
for vehicles, bicycles, and pedestrians captured by in-
vehicle cameras. However, the state of each pedes-
trian, such as the gaze direction and the gaze object,
is not annotated.
Sun et al. (Sun et al., 2020) have released the
Waymo Open Dataset (Waymo), which is annotated
with object bounding boxes and class labels in the
same way as nuScenes and nuImages. However, the
state of pedestrians is neither annotated.
On the other hand, the Pedestrian Intention Esti-
mation dataset (PIE dataset) (Rasouli et al., 2019) is
the dataset constructed for pedestrians’ behavior pre-
diction. In this dataset, 1,842 pedestrians captured
by in-vehicle cameras are annotated with information
such as ID, bounding box, whether they are likely to
cross the road, and whether they are gazing in the
camera direction. However, the pedestrian states nec-
essary for the PEGO detection task, such as the gaze
direction and object, are not annotated.
3 PEDESTRIAN’S GAZE OBJECT
DETECTION
In this section, we propose the PEGO Transformer,
which detects pedestrians’ gaze object in the image.
Unlike conventional gaze object detection methods,
our method does not rely on a high-resolution head
image, but uses features from a full-body image for
PEGO estimation. Also, instead of relying on a gaze
heatmap, the PEGO Transformer is trained to capture
the relationship between detected objects and pedes-
trians so that the likelihood of gaze object for each
pedestrian becomes high. The architecture of the
PEGO Transformer is shown in Fig. 2. The architec-
ture consists of four modules: a backbone to extract
features from the input images (CNN backbone), a
Deformable Transformer (Zhu et al., 2021) to refine
Object Queries
Deformable
Transformer
Decoder
Features from
Transformer Encoder
Projection Layer
Label Generator
Figure 3: Object queries.
the features from backbone (transformer encoder and
decoder), a Projection Layer to utilize the features to
produce the result for the final prediction, and a Label
Generator to generate the label index for training the
model via loading the dataset. We introduce each of
these modules in the following section.
3.1 Architecture of PEGO Transformer
Backbone. The backbone, consisting of a CNN, aims
to produce features with high-level semantics for in-
put to the Deformable Transformer. Given an input
image x
x
x ∈ R
C×H×W
, x
x
x is first fed into the CNN back-
bone (e.g., ResNet (He et al., 2016)), to provide fea-
tures with high-level semantics.
Deformable Transformer. The Deformable Trans-
former, consisting of a Deformable Transformer En-
coder and Deformable Transformer Decoder (Zhu
et al., 2021), aims to produce features that corre-
sponds with each object. The features from backbone
are then flattened and combined with positional en-
coding for the deformable transformer encoder. In the
deformable transformer encoder, which benefits from
the deformable self-attention module, the features in-
teract with each other to enhance the output.
As shown in Fig. 3, the Deformable Transformer
Decoder takes the output of the feature extractor as in-
put and associates the features corresponding to each
Pedestrian’s Gaze Object Detection in Traffic Scene
335

object to an object query (o ∈ R
C
) (Carion et al.,
2020) using the following procedure. First, the O =
{o
1
, o
2
, ..., o
N
} are initialized with random values and
input to the deformable transformer decoder. The in-
put O are associated with the output of the Trans-
former Encoder and the features corresponding to the
object. And then the deformable self-attention mod-
ule captures the relationship between each o ∈ O. As a
result, each o ∈ O becomes a feature that corresponds
one-to-one with the object.
Projection Layer. The Projection Layer (Vaswani
et al., 2017) consists of a Transformer Encoder and
an MLP layer. The Transformer Encoder captures the
gazing correspondences between pedestrians and ob-
jects with O as input. The MLP aims to produce the
confidence scores indicating if an object is gazed.
Label Generator. The Label Generator outputs the
label index of the pedestrian’s gaze object for training
the model. When a pedestrian is gazing at o
y
corre-
sponding to an object, then the output label index is
y.
To generate the label index, we first estimate the
bounding box and class probability of the object from
each o ∈ O. Next, we select o
m
that has the highest
probability for the pedestrian class and whose value
exceeds the threshold δ. Then, we store m which is the
index of the pedestrian to M = {m
1
, m
2
, . . .}. Finally,
the gaze object of the pedestrian corresponding to m ∈
M is obtained from the dataset, and outputs the index,
y, when o
y
corresponds to the gaze object. The
index m ∈ M of the pedestrian object query obtained
from the output of the label generator is also used in
the projection layer to sort the target pedestrian object
queries to the top.
3.2 Loss Function
The cross-entropy is used as the loss function. The
cross-entropy loss is calculated from the softmax of
the likelihood of each object as a gaze object by the
projection layer and the label of the gazed object out-
put by the label generator.
3.3 Inference of Pedestrian’s Gaze
Object
During the inference procedure, to detect the gaze ob-
ject, the in-vehicle camera image is first input to the
PEGO Transformer to obtain the likelihood of each
object as a gaze object. The object with the highest
likelihood is selected as the gaze object.
Table 1: Number of pedestrians and images in the con-
structed dataset.
Source Dataset Pedestrians Images
nuScenes 292 218
nuImages 1,240 870
Waymo 1,193 672
Total 2,725 1,760
4 PEDESTRIAN’S GAZE OBJECT
DATASET
To verify the performance of the PEGO Transformer,
we construct a PEGO Dataset annotate with the
pedestrian’s gaze object. In contrast to existing stud-
ies, we annotate pedestrians’ gaze points in each im-
age. Our dataset contains annotations of the target
pedestrian’s ID, bounding box coordinates, gaze point
coordinates, and pedestrian status. If the gaze object
cannot be identified, we annotate the point at which a
pedestrian is gazing. In addition, when it is difficult to
judge the point being gazed at, such as in the case of
eye contact or backward facing, we record these situa-
tions as an additional annotation in the dataset. Three
annotators annotate the same image to maintain the
quality of the annotation. Details of the dataset are
described in the following sections.
4.1 Image Details
This dataset was constructed based on the existing
datasets: nuScenes, nuImages and Waymo (Caesar
et al., 2020; Sun et al., 2020). These are large open
datasets containing images captured by in-vehicle
cameras and are annotated with the object’s bounding
box and its class label, as described in Section 2.3.
In our dataset, only images satisfying the follow-
ing conditions were collected:
1. The overlap between a pedestrian and other object
is less than 25 %.
2. The height of the pedestrian bounding box is 200
pixels or more.
3. The entire pedestrian bounding box is present in
the in-vehicle camera image.
4. Target pedestrian and the gaze object appear in the
same image.
5. The annotation target frames are selected by every
5 seconds in nuScenes and Waymo.
Consequently, a total of 2,725 pedestrians (1,760
images) were selected for annotation. The detail of
the dataset is shown in Table 1.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
336

Target Pedestrian
Clicked Positions
Figure 4: Example of annotation.
(a) No object (b) Outside the image
(c) Eye-contact
(d) Full backward
Figure 5: Situations in which annotators are unable to select
an object that the pedestrian is gazing at.
4.2 Annotations
Three annotators annotated 2,725 pedestrian’s gaze
objects in the dataset. As shown in Fig. 4, the an-
notators clicked on the gaze object of each pedestrian
using a specialized annotation tool for this task.
In some cases, the annotators could not determine
the gaze object due to several reasons, such as no gaze
object in the scene, the gaze object outside the image,
eye-contact, and full backward posture. Such pedes-
trians cannot be annotated directly by the above an-
notation steps. For such pedestrians, the annotators
annotated the special labels as follows:
No Object
As shown in Fig. 5(a), the “no object” label is an-
notated for a pedestrian who is not gazing at any
object. In this case, the annotator clicked on the
area at which the pedestrian was gazing.
Table 2: Annotation results.
Gazing at Pedestrians
Object 1,234
No object 450
Outside the image 370
Eye-contact 256
Full backward 20
Others 395
Outside the Image
As shown in Fig. 5(b), the “outside the image”
label is annotated for a pedestrian whose gaze ob-
ject outside the image. We placed a small click-
able area around the image in the annotation tool,
and the annotator clicked within this area while
maintaining the pedestrian’s viewing direction.
Eye Contact
As shown in Fig. 5(c), the “eye-contact” label is
annotated for a pedestrian who was gazing at the
in-vehicle camera.
Full Backward
As shown in Fig. 5(d), the “full backward” label
is annotated for a backward-facing pedestrian, be-
cause it is difficult to determine the gaze object in
the scene.
4.3 Annotation Results
Table 2 and Fig. 6 show the annotation results of the
pedestrian’s gaze objects in our dataset. As previously
mentioned, 2,725 pedestrians were annotated. The
target pedestrians are indicated by the yellow boxes,
the red dots are the points clicked by the annotators,
and the objects indicated by the red boxes are PEGOs
in Fig. 6. Each object recorded how many annotators
selected it as a PEGO. This allows the ground truth of
the gaze object to be changed according to the PEGO
detection task. In contrast to existing datasets for gaze
estimation, the size of the pedestrian relative to the
image size is small, and the pedestrian and the target
object are far apart.
The following annotations were included in the
dataset.
• Target pedestrian’s ID
• Target pedestrian’s bounding box
• Gaze point coordinates
• Eye-contact or not
• Full backward or not
• Bounding box of the PEGO (only for a pedestrian
who gazes at an object)
• Category of the PEGO (only for a pedestrian who
gazes at an object)
Pedestrian’s Gaze Object Detection in Traffic Scene
337

Figure 6: Annotation results: The target pedestrian in each image is indicated by yellow box and the PEGOs are indicated by
red boxes. Gaze points in the annotation results are indicated by red dots.
5 EXPERIMENT
A trained PEGO Transformer was used to detect the
pedestrian’s gaze object. In this section, we present
the experimental conditions and the results.
5.1 Implementation Details
We trained the PEGO Transformer on the dataset ex-
plained in section 4. Pedestrians gazing at the ob-
ject were used for training. We performed five-fold-
cross-validation on the dataset. Each fold contains 47,
44, 43, 44, 48 scene images and 92, 91, 89, 112, 130
pedestrians, respectively. In training step, horizontal
flips were applied to each image as data augmenta-
tion.
In the training procedure, only the parameters of
the projection layer were updated. The feature ex-
tractor and the deformable transformer were initial-
ized with the pre-trained weights of the Deformable
DETR (Zhu et al., 2021). We used the top 40 object
queries (N = 40) whose highest-class probability was
higher than the threshold. The threshold δ was set to
0.3.
5.2 Comparative Methods
To investigate the effectiveness of PEGO Trans-
former, we used two comparative methods to estimate
the gaze object of pedestrians. The first model was
a line-of-sight prediction based on GazeFollow (Re-
casens et al., 2015). We created an MLP model to es-
timate the pedestrian’s line of sight and trained it on
the constructed PEGO dataset. The distance from the
estimated line of sight to each of the candidate objects
was calculated, and the object closest to the estimated
line of sight was selected as the gaze object.
The second model was GaTector (Wang et al.,
2022). The model was pre-trained on the GOO
dataset (Tomas et al., 2021) and fine-tuned on the con-
structed PEGO dataset. In this comparison experi-
ment, the energy aggregation loss of GaTector was
calculated for all candidate objects in the image using
the estimated gaze heatmap, and the object with the
smallest loss was selected as the gaze object. The en-
ergy aggregation loss is the ratio of the average of the
estimated gaze heatmap over the entire image to the
average of the estimated heatmap over the bounding
box of the object.
5.3 Results and Discussion
Table 3 reports the accuracy of the PEGO detection.
We evaluated whether the detected gaze object with
the highest score for the target pedestrian was the
same as the ground truth of the gaze object in our
dataset, which we refer to as the Top1 accuracy. In ad-
dition, we evaluated whether the correct answer could
be included within the 2nd, 3rd, 4th, and 5th highest
objects, referred to as Top2, Top3, Top4, and Top5
accuracy, respectively.
The PEGO Transformer is able to estimate the
gaze object of pedestrians with higher accuracy than
chance rate and comparison methods. Figures 7(a),
(b), and (c) show examples of successful PEGO de-
tection. From these results, the PEGO Transformer
succeeded in estimating the gaze object using full-
body image features. In contrast, the estimation re-
sult in Fig. 7(d) was the opposite direction from her
as the gaze object.
As seen in Table 3, the proposed PEGO Trans-
former outperformed the comparative method (Ga-
Tector) that explicitly uses head images. GaTec-
tor requires high-resolution head images to estimate
PEGO, but it is difficult to obtain such images of
target pedestrians in traffic scenes because their dis-
tances become high. Therefore, the performance of
GaTector was lower than expected.
Next, the line of sight based method is difficult
to determine gaze object when multiple objects exist
close to the line of sight. On the other hand, as seen
in Fig. 7(c), the proposed PEGO Transformer can cor-
rectly estimate the gaze object even if a pedestrian
stands very close to the target pedestrian. However,
the proposed PEGO Transformer does not take into
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
338

Table 3: Pedestrian’s Gaze Object (PEGO) detection accuracy.
Top1(%) Top2(%) Top3(%) Top4(%) Top5(%)
Random guess 3.44 6.78 10.0 13.1 16.2
Comparative (Line of sight) 29.8 51.4 56.8 63.9 65.3
Comparative (GaTector) 19.5 22.3 24.6 29.3 32.0
Proposed (PEGO Transformer) 47.2 70.8 83.3 93.8 97.9
(a) True: She gazes an approaching car. (b) True: She gazes an approaching car.
(c) True: He gazes the car in the back. (d) False: She gazes the man on the motorcycle
and not the car behind her.
Figure 7: Examples of detection: The target pedestrian is indicated by the yellow box and the estimated PEGO by the red
box. Gaze points in the annotation results are indicated by red dots.
account the pedestrian’s pose, which can make it diffi-
cult to determine the gaze object, as seen in Fig. 7(d).
As analyzed by Wang et al. the bottleneck of Ga-
Tector is that the results of the gaze heatmap esti-
mation affect the gaze object prediction (Wang et al.,
2022). On the other hand, the PEGO Transformer can
directly detect the gaze object without relying on the
gaze heatmap. Therefore, the PEGO Transformer per-
formed well in scenes where gaze heatmap estimation
was difficult.
6 CONCLUSIONS
In this paper, we present a new task of detecting an
object that a target pedestrian is gazing at in a traffic
scene. Our proposed PEGO Transformer can estimate
a pedestrian’s gaze object without the high-resolution
head image and the gaze heatmap used in conven-
tional gaze detection methods. Unlike existing gaze
detection datasets considering human daily lives, our
dataset focuses on traffic scenes. This method and
dataset can provide important information for behav-
ior prediction and contribute to the realization of au-
tomated vehicles.
The PEGO dataset proposed in this paper con-
sists of gazed objects of pedestrians that are annotated
from a third-person view. This annotation scheme can
be easily applied to existing large data sets, but the
annotations may differ from the true objects gazed at
by the pedestrians. Thus, future work will include
evaluation of the PEGO transformer in controlled ex-
periments in which pedestrians gaze at predefined tar-
gets.
The previous study by Hata et al. (Hata et al.,
2022) proved that skeleton information is effective in
estimating whether a pedestrian is gazing at an in-
Pedestrian’s Gaze Object Detection in Traffic Scene
339

vehicle camera. Therefore, it is expected that the ac-
curacy will be further improved by taking skeletal in-
formation into account in the PEGO Transformer. We
plan to extend the dataset to improve the accuracy of
the proposed method.
ACKNOWLEDGMENT
This work was partially supported by JSPS Grant-in-
Aid for Scientific Research 23H03474. The computa-
tion was carried out using the General Projects on su-
percomputer “Flow” at Information Technology Cen-
ter, Nagoya University.
REFERENCES
Belkada, Y., Bertoni, L., Caristan, R., Mordan, T., and
Alahi, A. (2021). Do pedestrians pay attention? eye
contact detection in the wild.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2020). nuScenes: A multimodal dataset
for autonomous driving. In Proceedings of the 2020
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 11618–11628.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-End object de-
tection with transformers. In In Proceedings of the
European conference on computer vision, pages 213–
229. Springer.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The Cityscapes Dataset for Semantic Ur-
ban Scene Understanding. In In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 3213–3223.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. Interna-
tional Journal of Robotics Research (IJRR), page
1231–1237.
Hata, R., Deguchi, D., Hirayama, T., Kawanishi, Y., and
Murase, H. (2022). Detection of distant eye-contact
using spatio-temporal pedestrian skeletons. In Pro-
ceedings of the IEEE 25th International Conference
on Intelligent Transportation Systems, pages 2730–
2737.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In In Proceedings
of the 2016 IEEE Conference on Computer Vision and
Pattern Recognition, pages 770–778.
Rasouli, A., Kotseruba, I., Kunic, T., and Tsotsos, J. (2019).
PIE: A large-scale dataset and models for pedestrian
intention estimation and trajectory prediction. In Pro-
ceedings of the 2019 IEEE/CVF International Confer-
ence on Computer Vision, pages 6261–6270.
Recasens, A., Khosla, A., Vondrick, C., and Torralba, A.
(2015). Where are they looking? In Proceedings of
the Advances in Neural Information Processing Sys-
tems, volume 28, pages 199–207.
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Pat-
naik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine,
B., Vasudevan, V., Han, W., Ngiam, J., Zhao, H., Tim-
ofeev, A., Ettinger, S., Krivokon, M., Gao, A., Joshi,
A., Zhang, Y., Shlens, J., Chen, Z., and Anguelov,
D. (2020). Scalability in perception for autonomous
driving: Waymo Open Dataset. In Proceedings of the
2020 IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 2443–2451.
Tomas, H., Reyes, M., Dionido, R., Ty, M., Mirando, J.,
Casimiro, J., Atienza, R., and Guinto, R. (2021).
GOO: A dataset for gaze object prediction in retail
environments. In Proceedings of the 2021 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion Workshops, pages 3119–3127.
Tu, D., Min, X., Duan, H., Guo, G., Zhai, G., and Shen, W.
(2022). End-to-End Human-Gaze-Target Detection
with Transformers. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 2192–2200.
Tu, D., Shen, W., Sun, W., Min, X., Zhai, G., and Chen,
C. (2023). Un-gaze: a unified transformer for joint
gaze-location and gaze-object detection. IEEE Trans-
actions on Circuits and Systems for Video Technology.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin, I.
(2017). Attention is All you Need. In Proceedings of
the 2017 Advances in Neural Information Processing
Systems, volume 30.
Wang, B., Hu, T., Li, B., Chen, X., and Zhang, Z. (2022).
GaTector: A unified framework for gaze object pre-
diction. In Proceedings of the 2022 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 19588–19597.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J. (2021).
Deformable DETR: Deformable transformers for end-
to-end object detection. In Proceedings of the 9th In-
ternational Conference on Learning Representations.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
340
