
Learned Fusion: 3D Object Detection Using
Calibration-Free Transformer Feature Fusion
Michael F
¨
urst
1,2 a
, Rahul Jakkamsetty
2 b
, Ren
´
e Schuster
1,2 c
and Didier Stricker
1,2 d
1
Augmented Vision, RPTU, University of Kaiserslautern-Landau, Kaiserslautern, Germany
2
DFKI, German Research Center for Artificial Intelligence, Kaiserslautern, Germany
{firstname.lastname}@dfki.de
Keywords:
3D Object Detection, Calibration Free, Sensor Fusion, Transformer, Self-Attention.
Abstract:
The state of the art in 3D object detection using sensor fusion heavily relies on calibration quality, difficult to
maintain in large scale deployment outside a lab environment. We present the first calibration-free approach
for 3D object detection. Thus, eliminating complex and costly calibration procedures. Our approach uses
transformers to map features between multiple views of different sensors at multiple abstraction levels. In
an extensive evaluation for object detection, we show that our approach outperforms single modal setups by
14.1% in BEV mAP, and that the transformer learns mapping features. By showing calibration is not necessary
for sensor fusion, we hope to motivate other researchers following the direction of calibration-free fusion.
Additionally, resulting approaches have a substantial resilience against rotation and translation changes.
1 INTRODUCTION
Environment perception is one of the pillars of ad-
vances in automated driving. Specifically, 3D object
detection is critical, as knowing the position of ob-
jects in the world relative to the ego vehicle is needed
for path planning and avoiding collisions.
Many object detectors apply sensor fusion to in-
crease the average precision over single modal ap-
proaches. For example the lidar samples a far away
object only with as few as 1-7 points, rendering it
hardly detectable from lidar. In the camera image,
the same object typically spans an area of more than
30 ×30 pixels and therefore can be recognized.
The current state of the art in 3D object detec-
tion uses calibration in the form of a transform- and
projection-matrix. Since features are projected from
one view to the other, the calibration needs to be very
precise. For example an angular error of 1° results in
a misalignment of 0.7m at a distance of 40 meters, the
typical size of a pedestrians bounding box.
Whilst in benchmark datasets high quality calibra-
tion is given, it is difficult to obtain and maintain high
quality calibration at a production scale. Since there
a
https://orcid.org/0000-0001-6647-5031
b
https://orcid.org/0009-0000-0711-229X
c
https://orcid.org/0000-0001-7055-9254
d
https://orcid.org/0000-0002-5708-6023
BEV & Attention
BEV & Attention
Image
Grid Cells
Pedestrians
Van
Forward
Forward
Forward
Figure 1: Attention for highlighted grid cells (left) are over-
layed over the BEV lidar (right). The cone corresponding to
the grid cell has a high attention (yellow), while the rest has
low attention (black). Our calibration-free approach learns
the correspondence of image and bird’s-eye-view (BEV).
is variance in production, calibration must be done
per car. Furthermore, during the lifetime of a vehicle
deformations and thus changes in the calibration can
happen due to heat, vibration and even replacement
of sensors or defective parts. For calibration, typi-
cally special environments with markers are required.
If a vehicle has to be regularly re-calibrated in a spe-
cial environment, this poses a substantial challenge to
automated driving at scale.
Instead of improving calibration or introducing
continuous calibration adding complexity, we see the
solution in eliminating the need for calibration. Thus,
we propose and contribute:
• The new category of calibration-free sensor fusion
for object detection,
Fürst, M., Jakkamsetty, R., Schuster, R. and Stricker, D.
Learned Fusion: 3D Object Detection Using Calibration-Free Transformer Feature Fusion.
DOI: 10.5220/0012311400003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 215-223
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
215

• a concrete implementation using transformers, ex-
ploiting the characteristics of self-attention,
• an analysis of the effectiveness, showing that the
fusion can actually be learned (see Figure 1).
2 RELATED WORK
Object detection for autonomous vehicles is a very ac-
tively researched field with many approaches. Thus,
we focus on the approaches, which we consider the
most influential and closely related to our work. We
further categorize the work in two groups: 3D object
detectors and transformers in detection.
2.1 3D Object Detectors
Monocular (RGB-only) 3D detection is popular due
to the cheap price of cameras. Approaches like
MergeBox (G
¨
ahlert et al., 2018), (Mousavian et al.,
2017) and Direct 3D Detection (Weber et al., 2019)
are some of the first to push the performance enve-
lope for monocular detection. These early approaches
have difficulties with the depth perception due to the
inherent depth ambiguity of monocular data.
The current state of the art research like (Zong
et al., 2023), (Wang et al., 2023) and (Liu et al.,
2023a) focuses on temporal information and its ef-
ficient use for detection to partially overcome depth
ambiguity. However, their prediction quality still
lacks behind approaches using lidar.
PseudoLiDAR (Wang et al., 2019) discovered,
that convolution of depth information in the camera
view is sub-optimal. Leading to us using BEV fea-
tures as the primary source for BEV object detection.
LiDAR-based detection achieves much higher
mean average precision (mAP) than monocular ap-
proaches. PointPillars (Lang et al., 2019) is one of
the first approaches for automated driving to combine
point cloud processing with efficient CNN backbones.
CenterPoint (Yin et al., 2021) successfully extends
the concept of CenterNet (Duan et al., 2019) to 3D
object detection. At the core, they predict the center
point of the box and the size and orientation. For the
centerpoint, a heat map per object class is used and
allows for easy and precise localization of objects.
The current state of the art researches temporal as-
pects (Koh et al., 2023), scene synthesis (Zhan et al.,
2023), focusing on hard samples (Chen et al., 2023)
and innovative kernels (Chen et al., 2023). Tech-
niques used here might be applicable in learned fusion
as well in future research.
Sensor Fusion for object detection uses lidar and
RGB for better performance and robustness by lever-
aging the strengths of each sensor. Image data is
strong at initial recognition of objects, while lidar is
strong at precise localization of objects in 3D.
F-PointNet (Qi et al., 2018) first uses a 2D detec-
tor to then crop a frustum in the point cloud using the
calibration and predict the 3D object in that frustums
point cloud. PointPainting (Vora et al., 2020) predicts
segmentation masks using the camera and then col-
orizes the point cloud to predict the boxes there.
AVOD (Ku et al., 2018) projects anchors and pro-
posals into the views using the calibration to allow
them to crop and concatenate the features. The fused
features are used for precise bounding box prediction.
LRPD (F
¨
urst et al., 2020) uses instance segmentation
to generate proposals and projects them to the views,
fusing similar to AVOD. It leverages RGB for initial
recognition and both sensors for the fine localization.
Following the idea of explicit handling of sensors,
BEV Fusion (Liu et al., 2023b) transforms camera
features efficiently to the bird’s-eye-view and stacks
them with lidar features to predict bounding boxes.
The mapping is pre-computed using the calibration.
All current sensor fusion approaches in 3D object
detection use calibration matrices. The most common
use is to map information from one view to another.
2.2 Transformers in Detection
Transformers introduced by (Vaswani et al., 2017) use
self-attention. The self-attention is a dot product of
the query and key vectors creating the attention ma-
trix. The attention matrix is then multiplied with the
values resulting in a weighted sum of the values.
Detection Transformer (DeTr) (Carion et al.,
2020) uses the features of a convolutional encoder as
inputs to a transformer encoder-decoder architecture.
In contrast to common practice in detection, DeTr
predicts a set of bounding boxes instead of boxes for
each pixel or grid cell in the image. This makes the
approach very general, but more difficult to train.
Similar to DeTr, TransFusion (Bai et al., 2022) en-
codes features using regular backbones and then uses
queries to decode the bounding boxes. In a first step,
the queries are generated from a heat map for the li-
dar and in a second step, by projecting the center of a
query to 2D using spatially modulated cross attention.
Cross-Modal-Transformer (CMT) (Yan et al.,
2023) is one of the best published approaches on
nuScenes (Caesar et al., 2020). Similar to DeTr, it first
extracts the features from camera and lidar using en-
coders. Then it concatenates the features and applies a
transformer decoder. The queries are computed from
3D points, projected to the respective views. Thus en-
abling the correlation with the position embedding of
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
216

the respective views. We found in preliminary exper-
iments, that the model does not converge if the cali-
bration is omitted from this step.
Finally, TransFuser (Chitta et al., 2023) uses trans-
formers to fuse features for learning navigation in a
simulated environment. The TransFusion module in-
troduced by them is very flexible and does not use cal-
ibration. However, their overall architecture produces
global features unsuited for object detection.
Object detectors rely on calibration to map infor-
mation between views and TransFuser cannot be ap-
plied to detection without substantial modification.
3 APPROACH
Current state of the art detectors using sensor fu-
sion rely on calibration, even when using transform-
ers. It is very difficult to successfully train a com-
pletely calibration-free fusion approach, since ”ob-
ject queries might attend to visual regions unre-
lated to the bounding box to be predicted, leading
to a long training time for the network” (Bai et al.,
2022). Indeed, naively removing calibration from ex-
isting transformer based approaches does not work
in our preliminary experiments. Hence, we focus
on a simple model enabling a stable training in a
timely manner to show the possibility of training such
calibration-free models.
Since training transformers to map between the
different views is already a hard problem, the rest of
the model is kept small and straightforward. We focus
on using transformers to correlate features between
the views and eliminating the calibration.
3.1 TransFuseDet
Our model consists of a fusion encoder, upsampling
and task-specific heads. We use two ResNets (He
et al., 2016) to encode lidar and camera respectively.
Transformers fuse the features at different abstrac-
tion levels, similar to TransFuser (Chitta et al., 2023).
However, unlike their approach, we keep the features
of BEV and camera view separated to keep the spatial
interpretation of the feature maps intact. This allows
us to do object detection.
The features are then upsampled to increase res-
olution and finally used in two CenterNet-Style de-
coders for BEV object detection on the BEV features
and 2D object detection on the features in camera
space. The main goal is BEV object detection, but
the 2D object detection can be viewed as an auxiliary
task to improve BEV performance, as we will show
in an ablation study.
Figure 2 gives an overview over our architecture
and the following sections explain more details on
how the calibration-free fusion works.
3.2 Feature-Extraction: Multi-View
Fusion via Transformers
To extract the features, we partially follow the
methodology of TransFuser (Chitta et al., 2023). We
first apply a convolutional block with pooling from
the ResNets to each modality. Then, the features are
fused by a transformer. However, in order to apply
a transformer, the features need to be pooled, flat-
tened and then concatenated from the different views
of the sensors. After the transformer, the features
must be split into the views, reshaped and upscaled,
to be added to the features of the respective views.
Deviating from TransFuser, the fusion step is op-
tional after each ResNet block. In the ablation study,
we experimentally derive an optimal configuration.
Additionally, we introduce upsampling to increase
the resolution again, as the native output resolution of
the fusion encoder is too low for precise object detec-
tion. For upsampling we simply upscale the features,
concatenate them with the higher resolution features
and apply 1x1 convolutions.
3.2.1 Property of Transformers Allowing
Calibration-Free Fusion
The critical component of a transformer for fusion is
the attention, as it allows to correlate features inde-
pendent of their spatial location. For example, in our
bird’s-eye-view (BEV) representation the ego-vehicle
is on the left facing towards the right as shown by the
little arrow in Figure 2. Thus, if we have a car which is
far away in the scene, it might appear centered in the
camera view, but in the lidar bird’s-eye-view (BEV) it
is to the far right. Typically, calibration data would be
used to compute the corresponding positions in BEV
and camera view and then the features would be gath-
ered or projected to the other view. This is not done
in calibration-free fusion. Here, we leverage the prop-
erty of the dot product in attention to correlate similar
features independent of their position.
Scaled Dot-Product Attention (Vaswani et al.,
2017) consists of a dot product between the query Q
and the key K, scaled using the dimensionality d
k
of
the keys, and then weighting the values V by the re-
sulting (softmaxed) matrix.
Attention(Q, K, V ) = softmax
Q ·K
T
√
d
k
·V (1)
The dot product computes the similarity of two vec-
tors. For example, our convolutional encoder finds a
Learned Fusion: 3D Object Detection Using Calibration-Free Transformer Feature Fusion
217
Trans-
Fusion
up-
scale
up-
scale
+
+
.
.
BEV
head
2D
head
conv
1x1
conv
1x1
skip connection
Encoding Block (n-times)
Upsampling Block (k-times)
TransFusion
avg
pool
avg
pool
flatten
flatten
un-
flatten
un-
flatten
trans-
former
stack
split
up-
scale
up-
scale
conv
+ pool
conv
+ pool
2D camera
BEV lidar
.
+
concatenate
(along channels)
add
Forward
2D camera
BEV lidar
Forward
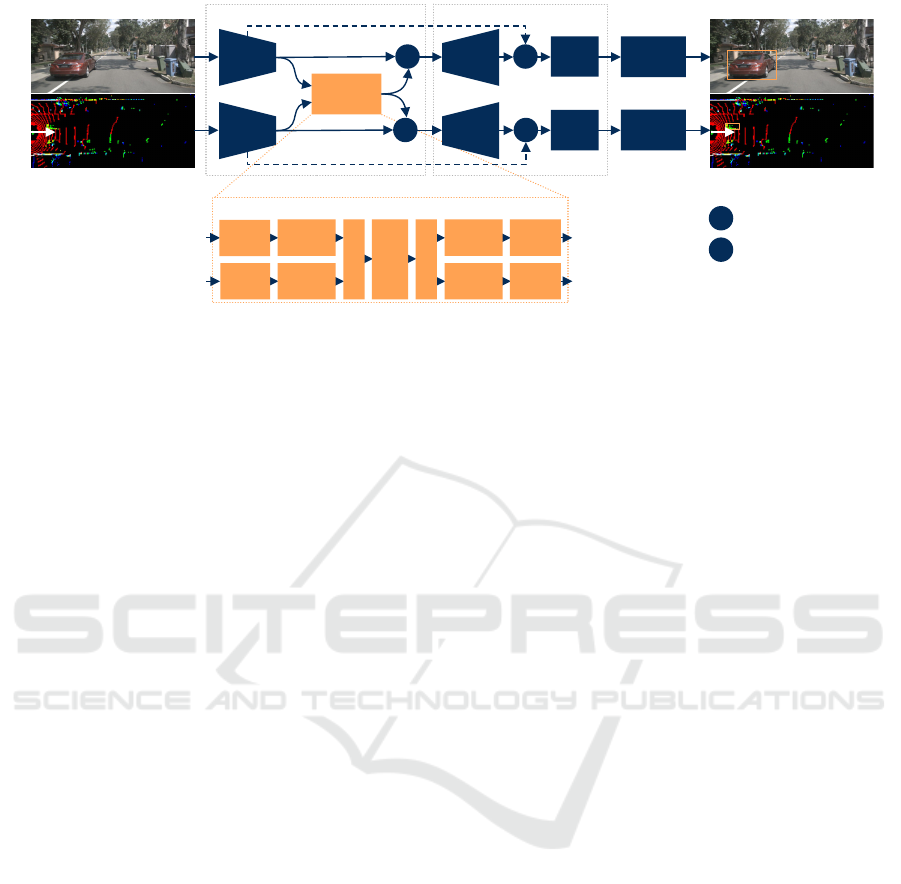
Figure 2: Our model is composed of three main components: First, the encoding block using TransFusion to fuse the features
without calibration. The block is repeated n = 4 times and the fusion (orange) is optional in each block. Second, the upsam-
pling block increasing the resolution of the feature maps. Upsampling is also repeated k = 3 times each time increasing the
resolution by a factor of two. Last, a task-specific head predicting the bounding boxes in BEV and 2D.
pedestrian in the image at position x
I
, and in the lidar
at position x
L
. Then, the resulting features f
x
I
and f
x
L
should have a similar semantic meaning, resulting in
a high value for the dot product and thus a high atten-
tion to the feature of the other view.
3.2.2 Pooling in Fusion Reducing
Computational Complexity
Transformers have a high computational cost in im-
age processing due to the high resolution. To apply
a transformer on a feature grid, the features must be
flattened. Thus, a vector with shape H ×W ×C must
be flattened to a vector of shape (HW ) ×C to be used
as Q = K =V in self-attention. The resulting attention
matrix is of shape (HW )×(HW )×C, having H
2
W
2
C
values. So for example doubling the input resolution
squares the flattened vectors size and quadratically in-
creases the size of the attention matrix, severely limit-
ing the resolution that is practical with respect to com-
putational cost and learnable parameters.
For fusion, we concatenate two or more flattened
feature vectors before using them as Q, K and V in the
self-attention. Despite only linearly increasing com-
plexity combined with the quadratic scaling this fur-
ther increases the computational cost.
To limit cost there are two options: Reducing the
resolution of the input to the model or pooling the fea-
ture maps before using them in the fusion. Pooling
feature maps allows to keep high resolution feature
maps and only sacrifice resolution in the fusion. For
object detection with CenterNet, a higher resolution
is beneficial. Higher resolution allows to distinguish
objects near each other, since only a single object per
grid cell can be detected. Additionally, the location of
the maxima in the heat map can correspond better to
the true mode, since quantization errors are smaller.
3.2.3 Upsampling
Since resolution has a big impact on the performance,
we use upsampling and combine the upsampled fea-
tures with the higher resolution and lower abstraction
of earlier layers of the model. Following common
convention, features are upsampled by a factor of two
and combined with the features of the previous en-
coding block. The features are concatenated along the
channel dimension, followed by a 1x1 convolution.
3.3 Detection Heads
The detector heads follow the proven methodology of
CenterNet (Duan et al., 2019), suitable for the fea-
ture maps created by our calibration free fusion. The
heads predict a class confidence and a bounding box
for each grid cell in the feature maps. Additionally, in
BEV we predict a yaw angle Θ.
Due to the jump in the angle from 360° to 0°, di-
rectly regressing it is not possible, as the derivative
would not be well defined at this jump. Thus, we fol-
low the convention of encoding the yaw angle Θ as
a class and an offset. Specifically, we split the angle
into 8 classes representing equally sized slices of the
value range from -22.5° to 337.5°. This leads to the
centers of each class being at 0°, 45°, 90°, ... 315°.
The offset value range is then from -22.5° to +22.5°.
To train the heads, we use a mean squared error
(MSE) over the entire grid map for the heat map loss
L
heat
. Since the heat map is heavily biased towards no
objects (background), we split the loss computation
into background and foreground loss. These are then
summed using a weighted sum:
L
heat
= w
f g
L
mse, f g
+ w
bg
L
mse,bg
. (2)
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
218
For the box and yaw we only apply the losses on the
grid cells associated with a bounding box. For other
grid cells, no loss is computed. The bounding box
loss L
bbox
is a smooth L1-loss and for the yaw we use
cross entropy for the class loss L
Θ-cls
and smooth L1-
loss for the offset regression loss L
∆Θ
.
Finally, for the BEV detection task the losses are
combined into a single loss L using a weighted sum,
where w denote the weights:
L
bev
= w
heat
L
heat
+ w
bbox
L
bbox
+ w
Θ
(L
Θ-cls
+ L
∆Θ
).
(3)
In the case of the 2D detection task, we use the same
loss without the yaw:
L
2D
= w
heat
L
heat
+ w
bbox
L
bbox
. (4)
The losses are then combined for the backpropagation
using a weighted sum of BEV and 2D task loss:
L = w
bev
L
bev
+ w
2D
L
2D
. (5)
3.4 Implementation Details
Based on experimental studies, our model is trained
with an AdamW optimizer a learning rate of 1e-4 and
weight decay of 1e-4. The learning rate is reduced
using exponential decay of 0.99996 every two steps.
For the loss weights we use w
BEV
= 0.95, w
2D
= 0.05,
w
f g
= 0.9, w
bg
= 0.1, w
heat
= 10, w
bbox
= 1.0 and
w
Θ
= 0.2. The model performs best without random
rotations and offsets of the lidar, but horizontal mir-
roring is enabled for both lidar and camera.
We do not use extensive point cloud augmenta-
tion or aggregation of points from multiple frames.
This reduces our mAP significantly, but allows us to
clearly show what our approach contributes instead of
the influence of augmentation strategies.
4 EVALUATION
We evaluate our approach on the nuScenes
dataset (Caesar et al., 2020) since it provides
the required modalities, i.e. lidar and camera, while
having a sufficient size. NuScenes has 40.000 anno-
tated key frames in 1000 driving sequences, which
is sufficiently large for training a transformer-based
calibration-free model. However, we noticed during
preliminary experiments that larger transformer-
based calibration-free models have difficulties
converging. Thus, we kept our model small to show
the possibility of calibration-free fusion.
The frames provided by nuScenes contain 6 cam-
era images, 1 lidar scan and 5 radars. We only use the
front and rear camera, as the side cameras have many
Table 1: Learned fusion outperforms its RGB-only or lidar-
only counterpart. The models are as identical as possible to
eliminate all other effects except for the learned fusion.
Method BEV mAP 2D mAP
RGB-only - 47.0
LiDAR-only 37.6 -
Learned Fusion [ours] 42.9 48.7
Table 2: Comparison of bird’s-eye-view mAP between
calibration-free fusion and much larger calibration-based
approaches, which cannot be applied without calibration.
Method Calib mAP
CMT (Yan et al., 2023) Yes 70.4
BEVFusion (Liu et al., 2023b) Yes 70.2
Learned Fusion [ours] No 48.8
frames without objects, yielding little benefit training
the model. Additionally, using two instead of six cam-
eras reduces training time by a factor of three.
4.1 Advantage over Single Sensor
Our approach introduces a new category of ap-
proaches next to camera only, lidar-only and
calibration-based fusion, we introduce calibration-
free fusion. Thus, comparability to existing ap-
proaches is limited.
From our approach we can simply derive a uni
modal variant by removing the fusion and the sub net-
work for the other modality. This allows us to show
the concrete benefit from calibration-free fusion over
single modality. However, due to the nature of our ap-
proach, it is not possible to add calibration. Thus, a di-
rect comparison of identical approaches showing the
potential advantage of calibration over calibration-
free is not possible.
Our approach is significantly outperforming its
two derivatives using single modality. This shows
that fusion without calibration has a clear advantage
over no fusion. Table 1 shows that fusion is 14.1%
better than the lidar-only approach in BEV detection
and 3.6% better than the camera only approach. The
smaller gap for 2D detection makes sense, since cam-
era is generally considered sufficient for 2D detection.
However, when comparing our approach to the
current best approach on nuScenes using calibration,
it is evident, that there is still a significant perfor-
mance gap (see Table 2). This gap is to be expected
from a completely novel approach using no calibra-
tion. As there is little prior work to build on, many
simplifications were done in this first approach. How-
ever, we are confident, that further research adding
advanced data augmentations and training strategies
Learned Fusion: 3D Object Detection Using Calibration-Free Transformer Feature Fusion
219
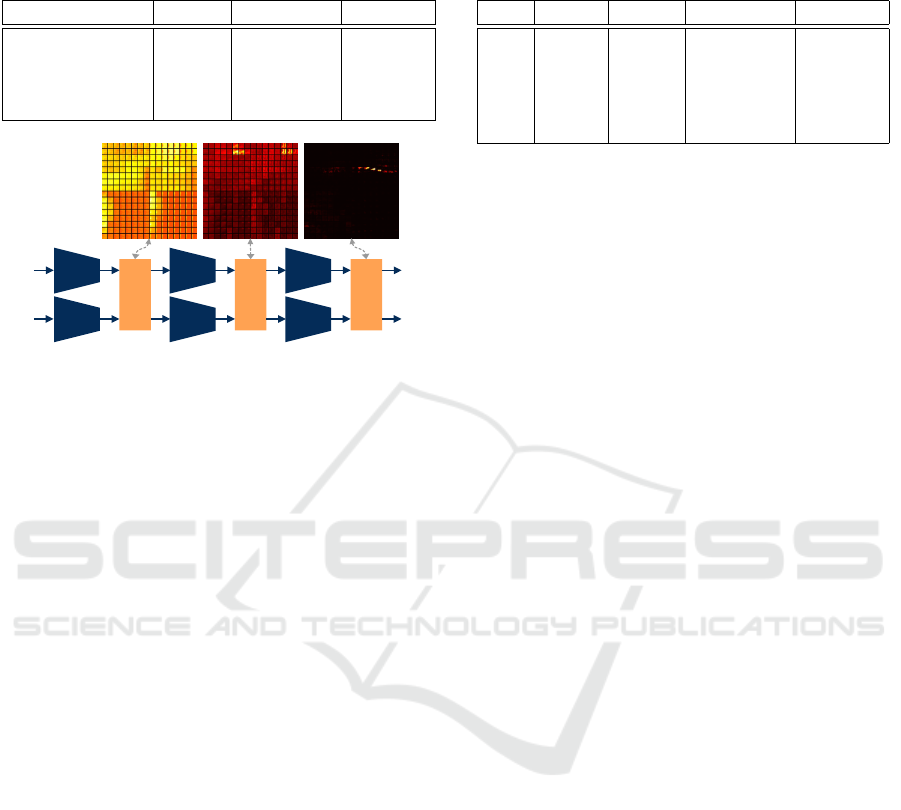
Table 3: The performance impact different fusion configu-
rations is measured. Adding fusions after the early layers of
the model does not improve performance in BEV.
Method Fusion BEV mAP 2D mAP
Learned Fusion 4 37.7 48.1
Learned Fusion 3,4 42.9 48.7
Learned Fusion 2,3,4 40.1 47.6
Learned Fusion 1,2,3,4 39.0 47.0
Fusion 1
conv
+ pool
conv
+ pool
Fusion 2
conv
+ pool
conv
+ pool
Fusion 3
conv
+ pool
conv
+ pool
...
...
RGB
BEV
attention
per grid cell
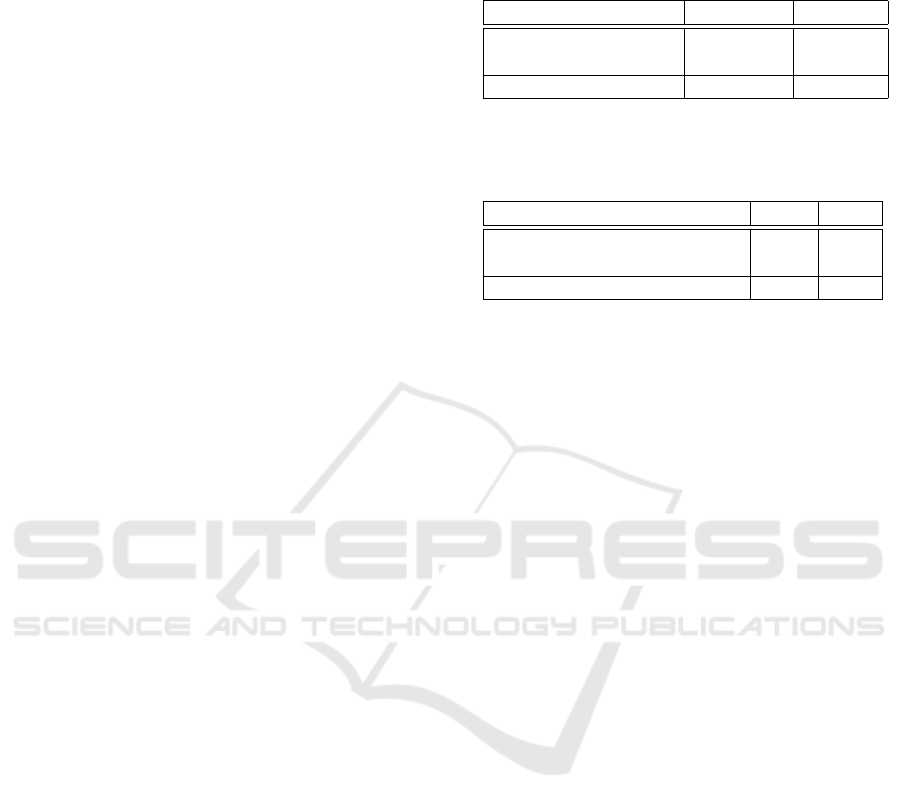
Figure 3: Visualizing the attention matrix, so that it corre-
sponds to the grid cells in the image, shows that later fusions
have more focus. Early fusions are are uniformly distributed
and do not contribute to a good fusion.
as well as scaling up the model can close the gap.
Without using any calibration information our ap-
proach learns to correlate the data from different
views. We believe that the calibration-free nature of
our approach and the advantage over single modal ap-
proaches make this a very promising new field in sen-
sor fusion for object detection.
4.2 Number of Fusion Layers
Our approach allows to have a fusion in 4 optional
places. In this study we evaluate which fusions yield
the best results. We can do a fusion after each of the
N last convolutional blocks in the ResNets. For ex-
ample fusions at 3 & 4 means there is a fusion after
the second last and last block in the ResNet of the
two modalities. In Figure 3, the first three fusions of
a model with all fusion blocks are shown.
In Table 3, we can see, that more fusion layers
than two does not have a positive impact on the per-
formance of the model. For example in the case of
four fusions the BEV mAP degrades by 3.9 mAP
(∼ 9%) compared to two fusions.
A possible explanation is that the feature vectors
correlated by our approach need a certain abstraction
level. Lower level feature maps lack the abstraction
and confuse the model. For example, a tire in an im-
age might not be visible in the lidar at all, thus corre-
lating these low level features does not provide much
value. Adding this fusion means the model needs
to actively learn to ignore the features of a different
Table 4: Random rotation and translation barely reduce the
mAP of the model. Even extreme movement of the lidar by
5.5 m and rotating up to 15° only has slight impact on mAP.
Rot. Trans. Mirror BEV mAP 2D mAP
0° 0m No 41.1 47.9
0° 0m Yes 42.9 48.7
0° 0.5m Yes 42.3 46.7
15° 0.5m Yes 41.3 47.1
15° 5.5m Yes 40.5 45.3
view. Inspecting the heat maps of the attention, we
noticed that the attention for the feature maps in the
earlier layers is low and unfocused, see an example in
Figure 3.
4.3 Sensor Displacement or Rotation
Since our model does not use explicit calibration, but
correlates features, it has a built-in robustness against
sensor displacement and rotation. To evaluate this,
we added random rotation and translation to the input
data of our model during training and testing time.
In Table 4, it is visible, that the model with mirror-
ing performs best. However, adding random transla-
tion of up to 0.5m only reduces the mAP by 0.6 mAP
in BEV. Adding random rotations of up to 15° again
only reduces the mAP in BEV by 1.6. For context,
calibration-based approaches expect precision in the
range of 0.01m and less than 1° error. Finally, we
evaluate extreme translations up to 5.5 meters (row 5)
losing 2.4 mAP over the baseline (row 2). How-
ever, with an offset of 5.5 meters the sensor could
be mounted on a vehicle next to ours, showing the
extreme robustness to translation and rotation of the
sensors in our approach.
These results show, that our approach has strong
robustness against changes in the alignment of sen-
sors with respect to translation and rotation. The cor-
relation of features via the attention is crutial for this.
We see the potential to apply this approach to multiple
different vehicles without the need for modification.
4.4 Loss and Task Weighting
When training the approach there are hyperpareme-
ters regarding the weighting in the loss. We split
the weighting in two categories, task weighting (see
Table 5) and loss weighting (see Table 6). In task
weighting, we evaluate the balance between the 2D
and BEV detection loss to achieve optimal BEV mAP.
For loss weighting, we evaluate the impact of the
weights for heat map foreground w
f g
, background
w
bg
and loss components w
heat
and w
Θ
.
A higher weight to the BEV loss increases per-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
220
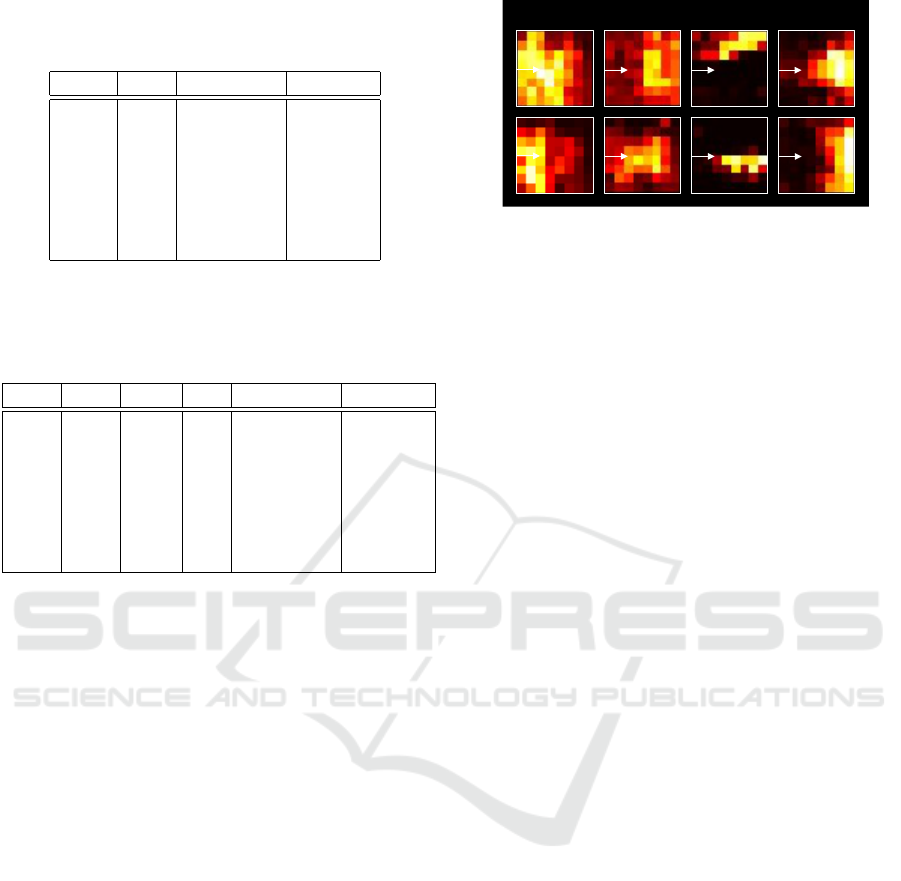
Table 5: Weighting the tasks differently affects perfor-
mance. BEV detection is the primary task reaching best
performance at 0.95 and 0.05 weighting.
w
BEV
w
2D
BEV mAP 2D mAP
0.20 0.80 38.1 45.3
0.50 0.50 41.8 49.4
0.80 0.20 42.1 49.7
0.90 0.10 40.7 47.4
0.95 0.05 42.9 48.7
0.99 0.01 41.9 44.0
1.00 0.00 40.5 0.0
Table 6: The weighting of the different loss components has
a significant impact on the performance. A high heat map
weight has strong impact on the BEV mAP. Our baseline
(row 3) is outperformed by a very high w
heat
(row 6).
w
fg
w
bg
w
heat
w
Θ
BEV mAP 2D mAP
0.80 0.20 10 0.2 43.5 46.8
0.90 0.10 2 0.2 39.3 45.3
0.90 0.10 10 0.2 42.9 48.7
0.90 0.10 10 1.0 44.2 50.7
0.90 0.10 20 0.2 42.8 49.4
0.90 0.10 50 0.2 48.8 49.0
0.95 0.05 10 0.2 41.5 47.3
formance (see Table 5). However, increasing beyond
0.95 reduces mAP again. The 2D loss can be viewed
as an auxiliary loss for the camera feature extrac-
tor. However, reaching 40.5 mAP even without the
2D loss, the fusion model outperforms lidar only at
37.6 mAP. Fusion alone contributes substantially to
the performance and the auxiliary 2D losss further im-
proves the effectiveness of fusion.
Increasing the heat map weighting in the loss has
a significant impact on the mAP (see Table 6). This
can be explained by the fact, that the correct location
of the center of a bounding box in the BEV is most
important to detection, since the size variation within
an object class is small. For example, all pedestrians
have almost the same size in BEV.
4.5 Attention Map Analysis
Besides the quantitative analysis of our approach, we
visualized and analyzed the behavior of the attention
maps to gain understanding.
For the visualization we reformatted the attention
map of the two flattened vectors into a grid of atten-
tion images for each cell in the feature map. In the
Figure 3 the full matrix can be seen per layer. As
described in Section 4.2 the feature maps of earlier
layers are uniform and lack focus. Thus, for our sub-
sequent analysis, we focused on the feature maps of
fusion layers 3 and 4.
Nearby Centered Left/Right Far Away
Forward
Forward
Forward
Forward
Forward
Forward
Forward
Forward
Figure 4: Depending on where in the image the object is,
the attention visualized in BEV is different. Nearby vs far
away and left vs right objects have different attention.
To validate that the attention has a meaningful in-
terpretation, we analyzed the attention maps of grid
cells containing objects. In Figure 4, we show the at-
tention for nearby, centered, left, right and far away
objects. Generally a correlation of the attention to the
region in the lidar can be seen. However, in some
cases the object attention lacks focus and is quite dif-
fuse. This especially happens for nearby objects cov-
ering large areas of the image.
Analyzing many of the attention maps, we noticed
a few trends: Firstly, especially the later attention lay-
ers focus their attention on cones and regions contain-
ing objects. Secondly, the attention of regions corre-
sponding to each other have a high attention for each
other. For example, the region at the horizon of the
image and the far away region in the lidar have a high
attention for each other.
We conclude from this observation, that the model
learns correlating features from the regions of the dif-
ferent views containing the same objects.
4.6 Qualitative Results
To validate the plausibility of our results, we visual-
ized the BEV detections over the pointcloud input to
the model. This allows us to inspect the detections
and see strengths and weaknesses of the model.
Overall, the model performance is good (see Fig-
ure 5). The model predicts the position and orien-
tation of objects well. However, in some cases the
model has false positives for pedestrian objects as
well as false negatives for construction workers. The
issues with construction workers are to be expected as
they are an underrepresented class in the dataset.
As there is no specific shortcomings of the model
apparent, our fusion seems to be quite robust.
Learned Fusion: 3D Object Detection Using Calibration-Free Transformer Feature Fusion
221

Figure 5: Visualization of the BEV detections predicted by our model. The model has good prediction for most cars, but
has difficulties at the edges of the BEV lidar. It cannot detect all construction workers in image two, however construction
workers are underrepresented in the dataset. At night the detection of the cars is very good despite the low visibility.
5 CONCLUSIONS
Overall, we introduce fully calibration-free sensor fu-
sion using neither intrinsic nor extrinsic calibration.
Eliminating the need for complex calibration proce-
dures in sensor fusion for object detection. As a
calibration-free sensor fusion in object detection, we
present an approach using transformers for correlat-
ing features between the views and then upscaling the
features to achieve the necessary resolution for pre-
cise object detection.
In the thorough evaluation, we show that
calibration-free sensor fusion is a promising field.
Concretely, we show that adding calibration-free fu-
sion increases performance over using a single modal-
ity. Further, we found that our approach is robust
against random translation and rotation, since the
model correlates features without a calibration matrix.
5.1 Limitations and Future Research
However, due to the complexity of the learning prob-
lem to correlate all features from the different views
with each other, the model has limitations. We iden-
tified two main limitations and propose directions for
further research to eliminate them.
First, the model complexity is a problem. The
transformer for the fusion requires many of parame-
ters and thus allows for a very limited resolution. This
leads to a gap in performance compared to the best
calibration-based fusion approaches. We expect that
approaches such as deformable-attention or a query
based approach like DeTr could help here.
The second limitation is the stability of the train-
ing. During early experimentation we were experi-
menting with a much larger DeTr style model, but
found the training to be too unstable. We attribute
this to the fact that learning a correlation between ran-
dom features at the beginning of the training is highly
unstable. Thus, advanced strategies for training and
especially pre-training could prove a very valuable di-
rection of further research.
ACKNOWLEDGEMENTS
This work was partially funded by the Federal Min-
istry of Education and Research Germany under the
project DECODE (01IW21001).
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
222

REFERENCES
Bai, X., Hu, Z., Zhu, X., Huang, Q., Chen, Y., Fu, H., and
Tai, C.-L. (2022). Transfusion: Robust lidar-camera
fusion for 3d object detection with transformers. In
IEEE/CVF conference on computer vision and pattern
recognition.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2020). nuscenes: A multimodal dataset
for autonomous driving. In IEEE/CVF conference on
computer vision and pattern recognition.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In European conference on
computer vision. Springer.
Chen, Y., Yu, Z., Chen, Y., Lan, S., Anandkumar, A., Jia, J.,
and Alvarez, J. M. (2023). Focalformer3d: Focusing
on hard instance for 3d object detection. In IEEE/CVF
International Conference on Computer Vision.
Chitta, K., Prakash, A., Jaeger, B., Yu, Z., Renz, K.,
and Geiger, A. (2023). Transfuser: Imitation with
transformer-based sensor fusion for autonomous driv-
ing. IEEE Transactions on Pattern Analysis & Ma-
chine Intelligence, 45(11).
Duan, K., Bai, S., Xie, L., Qi, H., Huang, Q., and Tian, Q.
(2019). Centernet: Keypoint triplets for object detec-
tion. In IEEE/CVF international conference on com-
puter vision.
F
¨
urst, M., Wasenm
¨
uller, O., and Stricker, D. (2020). Lrpd:
Long range 3d pedestrian detection leveraging specific
strengths of lidar and rgb. In IEEE international con-
ference on intelligent transportation systems (ITSC).
G
¨
ahlert, N., Mayer, M., Schneider, L., Franke, U., and Den-
zler, J. (2018). Mb-net: Mergeboxes for real-time 3d
vehicles detection. In IEEE Intelligent Vehicles Sym-
posium (IV).
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In IEEE confer-
ence on computer vision and pattern recognition.
Koh, J., Lee, J., Lee, Y., Kim, J., and Choi, J. W. (2023).
Mgtanet: Encoding sequential lidar points using long
short-term motion-guided temporal attention for 3d
object detection. In AAAI Conference on Artificial In-
telligence.
Ku, J., Mozifian, M., Lee, J., Harakeh, A., and Waslander,
S. L. (2018). Joint 3d proposal generation and ob-
ject detection from view aggregation. In IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS).
Lang, A. H., Vora, S., Caesar, H., Zhou, L., Yang, J., and
Beijbom, O. (2019). Pointpillars: Fast encoders for
object detection from point clouds. In IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition.
Liu, H., Teng, Y., Lu, T., Wang, H., and Wang, L. (2023a).
Sparsebev: High-performance sparse 3d object detec-
tion from multi-camera videos. In IEEE/CVF Interna-
tional Conference on Computer Vision.
Liu, Z., Tang, H., Amini, A., Yang, X., Mao, H., Rus, D. L.,
and Han, S. (2023b). Bevfusion: Multi-task multi-
sensor fusion with unified bird’s-eye view representa-
tion. In IEEE International Conference on Robotics
and Automation (ICRA).
Mousavian, A., Anguelov, D., Flynn, J., and Kosecka, J.
(2017). 3d bounding box estimation using deep learn-
ing and geometry. In IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition.
Qi, C. R., Liu, W., Wu, C., Su, H., and Guibas, L. J. (2018).
Frustum pointnets for 3d object detection from rgb-d
data. In IEEE/CVF Conference on Computer Vision
and Pattern Recognition.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems.
Vora, S., Lang, A. H., Helou, B., and Beijbom, O. (2020).
Pointpainting: Sequential fusion for 3d object detec-
tion. In IEEE/CVF Conference on Computer Vision
and Pattern Recognition.
Wang, S., Liu, Y., Wang, T., Li, Y., and Zhang, X. (2023).
Exploring object-centric temporal modeling for effi-
cient multi-view 3d object detection. arXiv preprint
arXiv:2303.11926.
Wang, Y., Chao, W.-L., Garg, D., Hariharan, B., Campbell,
M., and Weinberger, K. Q. (2019). Pseudo-lidar from
visual depth estimation: Bridging the gap in 3d object
detection for autonomous driving. In IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition.
Weber, M., F
¨
urst, M., and Z
¨
ollner, J. M. (2019). Direct
3d detection of vehicles in monocular images with a
cnn based 3d decoder. In IEEE Intelligent Vehicles
Symposium (IV).
Yan, J., Liu, Y., Sun, J., Jia, F., Li, S., Wang, T., and Zhang,
X. (2023). Cross modal transformer: Towards fast and
robust 3d object detection. In IEEE/CVF International
Conference on Computer Vision.
Yin, T., Zhou, X., and Krahenbuhl, P. (2021). Center-based
3d object detection and tracking. In IEEE/CVF con-
ference on computer vision and pattern recognition.
Zhan, J., Liu, T., Li, R., Zhang, J., Zhang, Z., and Chen, Y.
(2023). Real-aug: Realistic scene synthesis for lidar
augmentation in 3d object detection. arXiv preprint
arXiv:2305.12853.
Zong, Z., Jiang, D., Song, G., Xue, Z., Su, J., Li, H., and
Liu, Y. (2023). Temporal enhanced training of multi-
view 3d object detector via historical object predic-
tion. arXiv preprint arXiv:2304.00967.
Learned Fusion: 3D Object Detection Using Calibration-Free Transformer Feature Fusion
223
