
Vision-Perceptual Transformer Network for Semantic Scene
Understanding
Mohamad Alansari
1
, Hamad AlRemeithi
1,2
, Bilal Hassan
1,3
, Sara Alansari
1
, Jorge Dias
1,3
,
Majid Khonji
1,3
, Naoufel Werghi
1,3,4
and Sajid Javed
1,3
1
Department of Electrical Engineering and Computer Science, Khalifa University, Abu Dhabi, U.A.E.
2
Research and Technology Development Department, Tawauzn Technology & Innovation, Abu Dhabi, U.A.E.
3
Center for Autonomous Robotic Systems, Khalifa University, Abu Dhabi, U.A.E.
4
Center for Cyber-Physical Systems, Khalifa University, Abu Dhabi, U.A.E.
Keywords:
Attention Mechanisms, Computational Resources, Pyramid Vision Transformers, Scene Understanding,
Semantic Segmentation.
Abstract:
Semantic segmentation, essential in computer vision, involves labeling each image pixel with its semantic
class. Transformer-based models, recognized for their exceptional performance, have been pivotal in advanc-
ing this field. Our contribution, the Vision-Perceptual Transformer Network (VPTN), ingeniously combines
transformer encoders with a feature pyramid-based decoder to deliver precise segmentation maps with mini-
mal computational burden. VPTN’s transformative power lies in its integration of the pyramiding technique,
enhancing multi-scale variations handling. In direct comparisons with Vision Transformer-based networks and
variants, VPTN consistently excels. On average, it achieves 4.2%, 3.41%, and 6.24% higher mean Intersec-
tion over Union (mIoU) compared to Dense Prediction (DPT), Data-efficient image Transformer (DeiT), and
Swin Transformer networks, while demanding only 15.63%, 3.18%, and 10.05% of their Giga Floating-Point
Operations (GFLOPs). Our validation spans five diverse datasets, including Cityscapes, BDD100K, Mapil-
lary Vistas, CamVid, and ADE20K. VPTN secures the position of state-of-the-art (SOTA) on BDD100K and
CamVid and consistently outperforms existing deep learning models on other datasets, boasting mIoU scores
of 82.6%, 67.29%, 61.2%, 86.3%, and 55.3%, respectively. Impressively, it does so with an average compu-
tational complexity just 11.44% of SOTA models. VPTN represents a significant advancement in semantic
segmentation, balancing efficiency and performance. It shows promising potential, especially for autonomous
driving and natural setting computer vision applications.
1 INTRODUCTION
Semantic segmentation, the process of classifying
each pixel of an image into distinct semantic cate-
gories, is a fundamental task in computer vision with
critical applications in autonomous driving, medical
imaging, and robotics. Its significance in autonomous
driving lies in its capacity for scene analysis, object
detection, and behavior prediction (Siam and et al.,
2018).
This task, however, faces several hurdles. Com-
plex real-world scenes, with their clutter and partial
occlusions, pose a challenge in differentiating ob-
jects (Feng and et al., 2020). Variable lighting and
noisy images add further complexity. Another is-
sue is the processing of high-resolution images essen-
tial for detailed scene understanding, particularly in
real-time video streams for autonomous driving (Pa-
padeas and et al., 2021). Moreover, acquiring accu-
rate annotations for model training is labor-intensive
and prone to inconsistencies, risking overfitting and
limited model generalization (Feng and et al., 2020).
In addressing these challenges, deep learning, es-
pecially Convolutional Neural Networks (CNNs), has
been widely adopted for its effective feature extrac-
tion (Li and et al., 2019). The recent focus has shifted
towards transformer-based models, recognized for en-
hanced performance in complex segmentation scenar-
ios (Chitta and et al., 2022). These models, such as
SETR (SEgmentation TRansformers) (Zheng et al.,
2021), incorporate Vision Transformers (ViTs) for
their capability to handle diverse image scales. How-
ever, ViTs typically require high computational re-
sources and may struggle with tasks beyond image
Alansari, M., AlRemeithi, H., Hassan, B., Alansari, S., Dias, J., Khonji, M., Werghi, N. and Javed, S.
Vision-Perceptual Transformer Network for Semantic Scene Understanding.
DOI: 10.5220/0012313800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
325-332
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
325

(a)
(b)
Figure 1: Performance versus model computational com-
plexity on ADE20K. (a) presents all models, while (b) pro-
vides a zoomed-in view where the x-axis is confined to the
range of 0-500 Giga Floating-Point Operations (GFLOPs),
and the y-axis is focused on the range of 40-60 mean In-
tersection over Union (mIoU) in (%). In terms of com-
putational complexity, the Vision-Perceptual Transformer
Network (VPTN) achieves a new state-of-the-art (SOTA),
exhibiting a mean difference of 5.91% mIoU compared to
the top-performing Mask2Former, while demanding only
8.67% of its number of GFLOPs.
classification due to their fixed-size input tokenization
(Zheng et al., 2021).
To address these limitations, we introduce the
Vision-Perceptual Transformer Network (VPTN), a
novel approach that combines transformer encoders
with a feature pyramid to efficiently produce seg-
mentation maps, as shown in Figure 2, particu-
larly useful in autonomous driving contexts. VPTN
navigates multi-scale segmentation challenges effec-
tively, promising improvements in both accuracy and
computational efficiency for various computer vision
tasks.
2 RELATED WORKS
The field of autonomous driving has witnessed sig-
nificant advancements, largely driven by the develop-
ment of deep learning models for complex computer
vision tasks (Geiger et al., 2012). The core challenge
lies in accurately detecting, recognizing, and seg-
menting objects, which are critical for navigational
decision-making. Deep learning models address-
Machine
Vision
Camera
Transformer
Encoders
Feature
Pyramid
Auxiliary
Decoder
Visual
-Perception
Transformer Network
Input Image Segmented Image
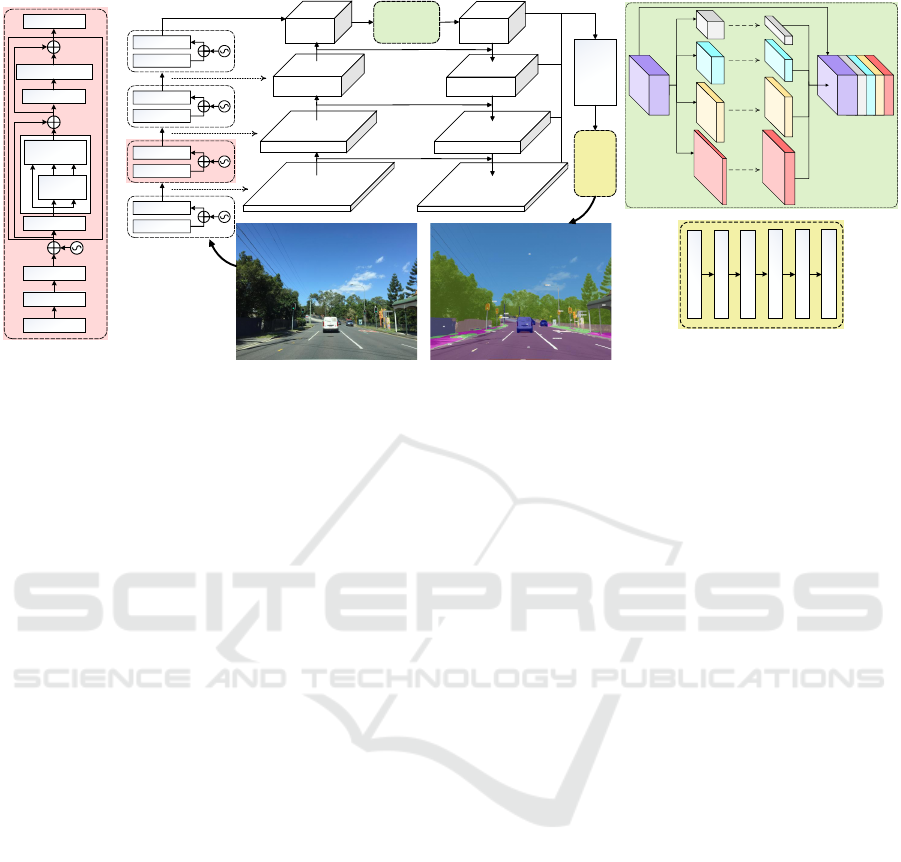
Figure 2: A high-level overview of the proposed VPTN-
based semantic scene understanding framework for au-
tonomous driving. The proposed model combines the
strengths of transformer encoders and multi-scale feature
pyramid to further improve semantic segmentation perfor-
mance.
ing these challenges can be categorized into Object
Detection Models, Semantic Segmentation Models,
Transformer-Based Models, and Multi-Task Learn-
ing Frameworks, each contributing uniquely to the
progress in autonomous driving technology.
2.1 Object Detection Models
Models such as YOLOv4 (Wang et al., 2021) excel in
quick object detection and localization. Their rapid
detection capabilities, essential for real-time applica-
tions, make them suitable for dynamic environments
like driving. However, they may struggle with small
or obscured objects and may not fully contextualize
the scene.
2.2 Semantic Segmentation Models
Models like Mask R-CNN (He and et al., 2020) focus
on pixel-wise classification to interpret complex driv-
ing scenes. Known for their accuracy in demarcat-
ing object boundaries, these models require substan-
tial computational power and extensive training data,
especially in diverse environmental conditions.
2.3 Transformer-Based Models
Transformer-based models, exemplified by SETR
(Zheng et al., 2021), have improved object detection
and semantic segmentation tasks. Their proficiency
in global context capture and dependency understand-
ing aids in complex scene analysis. Despite their ef-
fectiveness, the high computational demand of these
models poses challenges for real-time implementa-
tions in autonomous driving.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
326

2.4 Multi-Task Learning Frameworks
Frameworks like UPerNet (Xiao and et al., 2018)
demonstrate competence in processing varied image
annotations, crucial for detecting and identifying di-
verse objects in driving contexts. While offering ver-
satility, the complexity of balancing multiple learning
tasks requires careful tuning to avoid bias towards a
particular task.
2.5 Contribution
Our study introduces the VPTN, an innovative frame-
work tailored for semantic segmentation in au-
tonomous driving. VPTN integrates transformer-
based global contextual understanding with multi-
task framework precision, excelling in multi-scale
variation handling and high-resolution map genera-
tion.
The key novelties of our approach are:
• A novel efficient hierarchical pyramiding
transformer-based architecture adept at seman-
tic segmentation challenges, particularly in
multi-scale scenarios
• Comprehensive ablation studies to fine-tune seg-
mentation heads and loss functions, highlighting
the pyramiding technique’s effectiveness against
conventional state-of-the-art (SOTA) transformer
models
• SOTA performance on BDD100k and CamVid,
with competitive results on Cityscapes, Mapil-
lary Vistas, and ADE20K. Our models distinguish
themselves in balancing computational efficiency
and high performance, as illustrated in Figure 1
3 PROPOSED METHODOLOGY
In this research, we propose a deep learning architec-
ture called VPTN for semantic scene understanding.
The VPTN is a hybrid architecture consisting of two
main components: a transformer-based backbone net-
work and a decoder network, as shown in Figure 3.
3.1 VPTN Backbone
The backbone network is designed in a ”progressive
shrinking” fashion to reduce the number of param-
eters in the network by gradually reducing the fea-
ture amps by a factor of 1/4 as the network progresses
through its stages (Wang and et al., 2022b). This ar-
chitecture comprises four cascading stages, each in-
corporating a stack of transformer blocks (Dosovit-
skiy and et al., 2020) to maintain long-range depen-
dencies between image regions. The resulting feature
pyramid, with a four-level feature pyramid (F1, F2,
F3, and F4) with a stride of 4, 8, 16, and 32 pixels
relative to the input image.
Inputs to transformer blocks are a blend of outputs
from previous blocks and lower-level feature maps,
facilitating complex pattern recognition and multi-
scale integration. Contrasting traditional approaches
(Dosovitskiy and et al., 2020), VPTN generates token
embeddings from the input image via convolutional
layers, enhancing spatial information extraction for
images of any size. The network also features a chan-
nel attention module, selectively emphasizing or di-
minishing features across different channels, focusing
on relevant features while minimizing noise.
3.2 VPTN Decoder
The VPTN decoder consists of three main compo-
nents: a pyramid pooling module, a feature fusion
module, and a segmentation head.
3.2.1 Pyramid Pooling Module
In VPTN decoder, the pyramid pooling module is
used on the last depth of the VPTN backbone net-
work to extract features from multiple scales. The
output of the PPM module is a set of four pooled fea-
ture maps, each corresponding to a different scale of
the input image, as shown in Figure 3. These pooled
feature maps are then concatenated and fed into the
subsequent feature pyramid depths in the network for
further processing.
3.2.2 Feature Fusion Module
The proposed VPTN model employs a pyramid struc-
ture with multiple levels of feature maps. Each level
captures features at a different scale, allowing the
model to capture both local and global information.
For instance, low-level features may help to segment
fine details such as edges, while high-level features
may help to capture the overall shape of objects.
In the feature fusion module of the proposed VPTN
model, the features from different levels of the pyra-
mid are concatenated to preserve the complementary
information and discard any redundant information.
3.2.3 Segmentation Head
The segmentation head, consisting of convolutional,
fully connected, and upsampling layers, followed by
a softmax function, processes high-resolution feature
Vision-Perceptual Transformer Network for Semantic Scene Understanding
327
Stage
1
Stage
2
Stage
3
Stage
4
(1/4)
(1/8)
(1/16)
(1/32)
Pyramid
Pooling
(1/16)
(1/8)
(1/32)
Encoder
OPE
Encoder
OPE
Encoder
OPE
Encoder
OPE
(1/4)
Segmented Image
Input Image
Conv
Flatten
Norm
Spacial
Reduction
Multi-Head
Attention
Norm
Feed Forward
Input
Output
Stage
n
Overlapping
Patch Emb
(OPE)
Feature
Fusion
Segmentation
Head
Upsample
Concatenation
Conv
Conv
Conv
Conv
Avg
Pooling
Conv
4x Upsampling
Input
Softmax
Output
Fully Connected
Backbone
Feature
Pyramid
Auxiliary Decoder
Channel Attention Module
F1
F2
F3
F4
Transformer
Encoders
Figure 3: Schematic of the proposed VPTN model, consisting of a pyramidal backbone network (left side) and feature
pyramid-based decoder network (right side). The backbone generate hierarchical feature maps at different levels of abstrac-
tion, forming a four-level feature pyramid (F1, F2, F3, and F4) with specific stride values. The decoder use the pyramid
pooling module on the last depth of the VPTN backbone to extract features from multiple scales and concatenate the pooled
feature maps and pass them to subsequent feature pyramid depths for further processing.
maps from the lateral network. It generates a proba-
bility distribution across classes, ultimately assigning
the highest probability class to each pixel for the final
segmentation map.
4 EXPERIMENTAL SETUP
4.1 Datasets Description
In our rigorous assessment of VPTN’s performance,
we leverage five publicly available datasets, encom-
passing urban road and driving environments, as well
as generic semantic segmentation scenarios. Each
dataset (Cordts and et al., 2016; Yu et al., 2020;
Neuhold and et al., 2017; Brostow and et al., 2009;
Zhou et al., 2017) includes separate training, vali-
dation, and test sets. However, the test set annota-
tions for Cityscapes, BDD100K, and Mapillary Vistas
are not publicly available, so we use their validation
sets for evaluation. A summary of the datasets and
their training-validation splits is detailed in Table 1.
This selection ensures a comprehensive assessment of
VPTN across varied environments and conditions.
4.1.1 Cityscapes
The Cityscapes (Cordts and et al., 2016) dataset fo-
cuses on urban scenes with 5,000 images annotated
in 19 categories, reflecting complex city elements and
diverse weather and lighting conditions.
4.1.2 BDD100K
The BDD100K (Yu et al., 2020) dataset contains
100,000 driving videos and 10,000 images of urban
scenes, aligned with Cityscapes in terms of object
classes, but offering broader environmental diversity.
4.1.3 Mapillary Vistas
The Mapillary Vistas (Neuhold and et al., 2017)
dataset provides over 25,000 high-resolution images
with annotations in 66 classes, sourced from various
devices and covering a wide geographic range.
4.1.4 CamVid
CamVid (Brostow and et al., 2009) dataset is a smaller
dataset with 701 road scene images, offering detailed
annotations in 32 categories, captured through a car-
mounted camera in Cambridge, UK.
4.1.5 ADE20K
ADE20K (Zhou et al., 2017) dataset is a broad
dataset for generic semantic segmentation, featuring
over 20,000 images annotated in 150 fine-grained and
1,000 common categories, covering both indoor and
outdoor scenes.
4.2 Evaluation Metric
Our study uses the mean Intersection over Union
(mIoU) as the primary metric for assessing VPTN’s
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
328
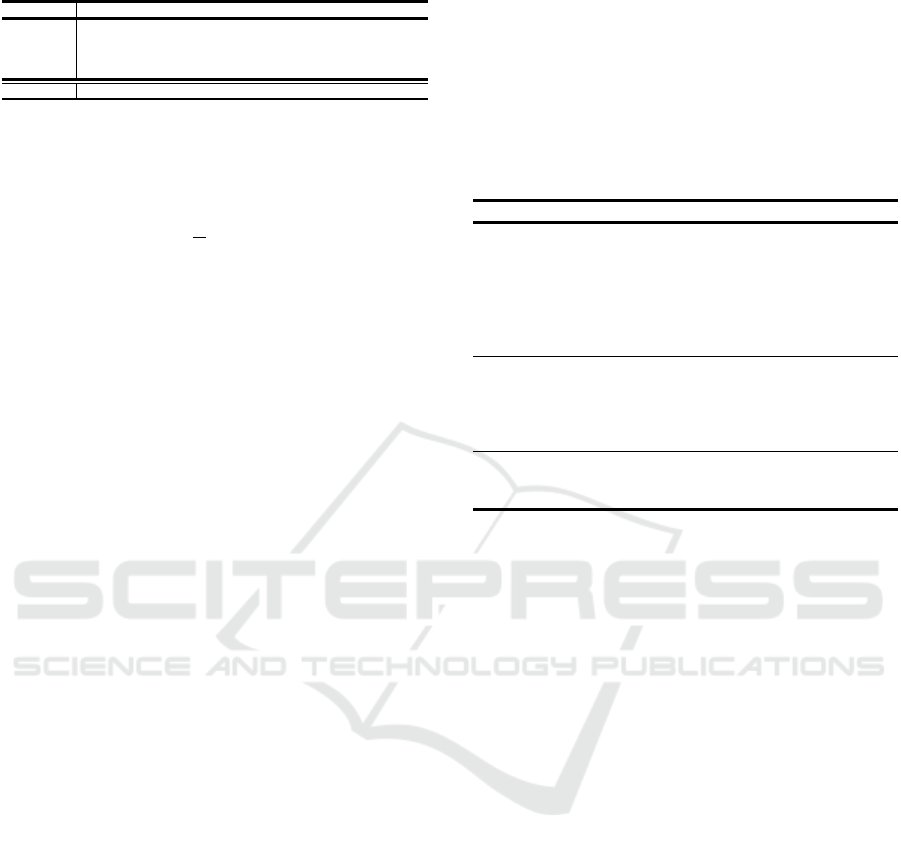
Table 1: Dataset Training and Evaluation Sets Statistics.
Dataset For Training (#images) For Evaluation (#images)
Urban
road/driving
Cityscapes Train Set (2,975) Val Set (500)
BDD100K Train Set (7,000) Val Set (1,000)
Mapillary Vistas Train Set (18,000) Val Set (2000)
CamVid Train + Val Sets (469) Test Set (232)
Generic ADE20K Train Set (20,210) Val Set (2,000)
performance. mIoU is a standard measure in seg-
mentation tasks, accounting for both true positive and
false positive predictions. The mIoU score is calcu-
lated as:
mIoU =
1
C
×
C
∑
i=1
(IoU
i
), (1)
where C is the number of classes, and IoU
i
is the IoU
value computed for the i
th
class.
4.3 Training Protocol
All experiments are conducted using Python 3.10.0
(64-bit) and the and Pytorch 1.8.1 on a workstation
with an Nvidia GeForce RTX 3080 GPU for VPTN
model development. Training was conducted over
100 epochs with a batch size of 8, testing five loss
functions to optimize performance. AdamW opti-
mizer with a 0.001 starting learning rate and 0.01
decay, accompanied by a warmup scheduler (power
of 0.9, 10 epochs, 0.1 ratio), facilitated the training.
Model evaluations were performed every epoch with
flip augmentation enabled.
5 EXPERIMENTATION RESULTS
This section explains various ablation studies related
to the VPTN model. Following that, we assess the
performance of the proposed model using both sub-
jective and objective measures.
5.1 Ablation Study
5.1.1 Optimizing Decoder and Hyperparameters
Selection
Extensive ablation studies were conducted to fine-
tune the VPTN model, particularly focusing on op-
timizing the decoder and hyperparameters, presented
in Table 2. The Cityscapes dataset was primarily
used for these studies due to its manageable size and
relevance to urban scenes. Images were resized to
512×512 and the VPTN-B3 network was selected
to expedite the training process. Our experiments
included exploring various decoder options and loss
functions. UPerNet emerged as the most effective de-
coder, and the weighted cross-entropy loss function
was identified as the best fit for our model. We also
investigated the use of Trainable Structure Tensors
(TST) (Hassan and et al., 2021) as a pre-processing
technique but found it less effective compared to us-
ing the original dataset.
Table 2: Identifying the Optimal Configuration for VPTN-
B3 on the Cityscapes Dataset. Values in bold indicate
the selected best-performing configuration for our proposed
model.
Ablation Experiments mIoU (%)
Decoder
UPerNet 75.8
Lawin 72.7
FPN 69.4
FCN 67.6
FaPN 67.2
SFNet 65.8
SegFormer 61.6
Loss Function
Weighted Cross entropy 75.8
Cross entropy 73.4
Ohem Cross entropy 73.3
Dice 72.4
Lovasz 55.7
Data Pre-processing
Baseline 75.8
Fused Original and TST 68.5
TST 55.4
5.1.2 Effect of Pyramiding Technique
Integration
Our study evaluated the VPTN model’s integration
of the pyramiding technique against ViT variants on
the ADE20K dataset, focusing on mIoU and Giga
Floating-Point Operations (GFLOPs) for computa-
tional efficiency.
The comparative analysis, detailed in Table 3,
highlights VPTN’s superior performance. Our
VPTN-B4 and VPTN-B5 models outperformed the
latest SOTA model, UPerNet-Swin-L, by 2.19% and
3.25% in mIoU, respectively, while requiring signif-
icantly less computational power (1.20% and 1.31%
of GFLOPs). Across all VPTN models, the average
performance was 4.30% lower than UPerNet-Swin-L,
but they used only 1.08% of its GFLOPs, showcas-
ing VPTN’s efficiency in balancing performance with
lower computational demand.
5.2 Comparison with State-of-the-Art
In evaluating the VPTN model, we conducted a
thorough comparative analysis with other leading
methods across five distinct datasets, focusing
on mIoU scores and computational efficiency
(GFLOPs). The GFLOPs metrics were com-
puted using specific input scales for each dataset:
{1024, (512, 1024), 1024, (720, 960), 512} for
Cityscapes, BDD100K, Mapillary Vistas, CamVid,
Vision-Perceptual Transformer Network for Semantic Scene Understanding
329
Cityscapes
Mapillary Vistas
CamVid
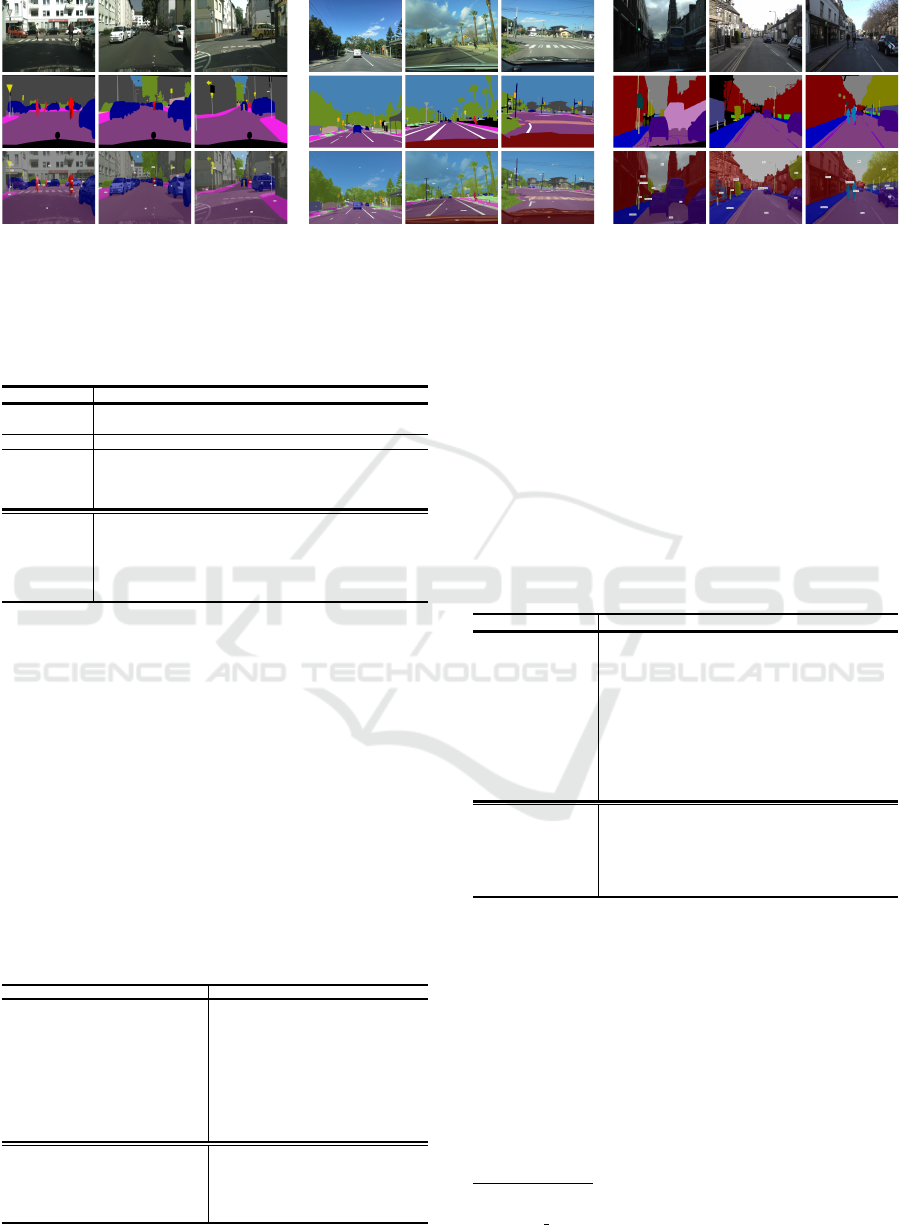
Figure 4: Qualitative segmentation results of the proposed VPTN model using three different datasets (Cordts and et al., 2016;
Neuhold and et al., 2017; Brostow and et al., 2009). The top row shows the original frames from each dataset. The middle
row shows the ground truth labels, and the last row displays the predicted results.
Table 3: Performance comparison of the proposed VPTN
with ViT variants methods using ADE20K validation
dataset.
Method Encoder Parameters (M) GFLOPs mIoU (%)
DPT ViT-Hybrid 109.16 324.57 49.02
DPT ViT-L 341.56 721.03 47.63
UPerNet DeiT-S 52 1099 44.0
UPerNet Swin-T 60 945 46.1
UPerNet Swin-S 81 1038 49.3
UPerNet Swin-B 121 1841 51.6
UPerNet Swin-L 234 3230 53.5
VPTN (ours) PVT v2-B0 6.13 29.53 50.9
VPTN (ours) PVT v2-B1 16.04 30.82 51.5
VPTN (ours) PVT v2-B2 27.39 32.51 52.6
VPTN (ours) PVT v2-B3 47.28 35.55 53.1
VPTN (ours) PVT v2-B4 64.59 38.90 54.7
VPTN (ours) PVT v2-B5 83.99 42.25 55.3
and ADE20K, respectively.
5.2.1 Cityscapes
On the Cityscapes validation dataset, our VPTN mod-
els displayed impressive mIoU scores while requiring
significantly fewer GFLOPs compared to the current
SOTA model, OneFormer. Specifically, VPTN mod-
els had an average of 5.9 percentage points difference
in mIoU while using only an average of 17.86% of
OneFormer’s computational power. Visual segmenta-
tions from Cityscapes are shown in Figure 4.
Table 4: Performance comparison of the proposed VPTN
with other SOTA methods using the Cityscapes validation
dataset.
Method Encoder GFLOPs mIoU (%)
SegFormer (Xie and et al., 2021) MiT-B0 125.5 78.1
DeepLabV3Plus (Chen et al., 2018) D-Xception-71 1444.6 79.6
SegFormer (Xie and et al., 2021) MiT-B1 243.7 80.0
SegFormer (Xie and et al., 2021) MiT-B2 717.1 81.0
HRNetV2 (Wang and et al., 2021) HRNetV2-W48 1206.3 81.6
SETR (Zheng et al., 2021) ViT-L - 82.2
CMX (SegFormer-B4) (Liu and et al., 2022) MiT-B4 - 82.6
Panoptic-DeepLab (Cheng and et al., 2020) SWideRNet 1095.0 83.1
SegFormer (Xie and et al., 2021) MiT-B5 1460.4 84.0
Mask2Former (Cheng and et al., 2022) Swin-L 868 84.3
OneFormer (Jain and et al., 2022) ConvNeXt-XL 775 84.6
VPTN (ours) PVT v2-B0 118.10 77.4
VPTN (ours) PVT v2-B1 123.19 78.3
VPTN (ours) PVT v2-B2 129.89 79.6
VPTN (ours) PVT v2-B3 141.96 80.1
VPTN (ours) PVT v2-B4 153.08 81.5
VPTN (ours) PVT v2-B5 164.20 82.6
5.2.2 BDD100K
Results on the BDD100K dataset’s validation set de-
tailed in Table 5 show that VPTN outperformed the
previous SOTA, ConvNeXt-B, by 0.04% in mIoU,
while utilizing just 4.58% of its GFLOPs. The per-
formance metrics for different models were sourced
from the official BDD100K GitHub repository
1
and
related research papers.
Table 5: Performance comparison of the proposed VPTN
with other SOTA methods using the BDD100K validation
dataset.
Method Encoder GFLOPs mIoU (%)
DeiT DeiT-S - 61.52
Semantic FPN ResNet50-FPN - 61.53
PointRend ResNet50-FPN - 61.80
PSANet ResNet50-Dilate8 205.98 61.99
ViT ViT-B - 62.11
DeepLabV3 ResNet101-Dilate8 - 63.23
DPT ViT-B - 63.53
HRNet HRNet48 - 63.93
DeepLabV3Plus ResNet101-Dilate8 2032.3 64.49
Swin Transformer Swin-B 1188 65.98
ConvNeXt ConvNeXt-B 1828 67.26
VPTN (ours) PVT v2-B0 59.05 60.89
VPTN (ours) PVT v2-B1 61.61 61.72
VPTN (ours) PVT v2-B2 64.97 63.13
VPTN (ours) PVT v2-B3 71.73 64.46
VPTN (ours) PVT v2-B4 77.69 66.32
VPTN (ours) PVT v2-B5 83.65 67.29
5.2.3 Mapillary Vistas
The VPTN achieved a maximum mIoU of 61.2% on
Mapillary Vistas, compared to 82.6% on Cityscapes.
Despite the increased complexity, the VPTN network
yields competitive results and surpasses some purely
CNN-based architectures. When compared with the
current SOTA model, Mask2Former, we found that
our models exhibited an average mIoU difference of
10.98 percentage-points, all while utilizing only an
average of 15.95% of the computational power (mea-
1
https://github.com/SysCV/bdd100k-models/tree/
main/sem seg
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
330
sured in GFLOPs). Sample segmentations are illus-
trated in Figure 4.
Table 6: Performance comparison of the proposed VPTN
with other SOTA methods using the Mapillary Vistas vali-
dation dataset.
Method Encoder GFLOPs mIoU (%)
SegBlocksRN50 (Verelst and et al., 2023) EfficientNetLite1 254.4 41.7
NiSeNet (Nag and et al., 2019) ResNet101 - 48.32
DeepLabV3Plus (Chen et al., 2018) ResNet50 51.4 49.4
HMSANet (Hua and et al., 2022) ResNet50 - 52.2
MaskFormer (Li and et al., 2022) ResNet50 181 55.4
Mask2Former (Cheng and et al., 2022) ResNet50 226 59.0
HMSANet (Hua and et al., 2022) HRNet 61.1
Mask2Former (Cheng and et al., 2022) Swin-L 868 64.7
VPTN (ours) PVT v2-B0 118.10 55.9
VPTN (ours) PVT v2-B1 123.19 56.3
VPTN (ours) PVT v2-B2 129.89 57.6
VPTN (ours) PVT v2-B3 141.96 58.8
VPTN (ours) PVT v2-B4 153.08 60.4
VPTN (ours) PVT v2-B5 164.20 61.2
5.2.4 CamVid
On the CamVid testing dataset, VPTN-B4 and VPTN-
B5 models achieved SOTA results with mIoU scores
of 84.1% and 86.3%, respectively, as exhibited in Ta-
ble 7. These results show a marked improvement
over the previous SOTA model, SIW, with an mIoU
score of 83.7%. To provide a more tangible perspec-
tive of the VPTN’s capabilities, Figure 4 visually de-
picts its segmentation prowess through a selection of
randomly chosen images from the CamVid dataset.
These images further substantiate the VPTN’s capac-
ity to excel in complex real-world scenarios.
Table 7: Performance comparison of the proposed VPTN
with other SOTA methods using the CamVid testing dataset.
Method Encoder GFLOPs mIoU (%)
VideoGCRF (Chandra and et al., 2018) ResNet101 - 75.2
ETC-Mobile - MobileNetV2+ALL (Liu and et al., 2020) MobileNetV2 - 78.2
DeepLabV3Plus + SDCNetAug WideResNet38 - 81.7
RTFormer-Base (Wang and et al., 2022a) - 537.0 82.5
SIW (Yin and et al., 2022) SegFormer-B5 - 83.7
VPTN (ours) PVT v2-B0 77.92 80.8
VPTN (ours) PVT v2-B1 81.84 81.3
VPTN (ours) PVT v2-B2 85.59 81.7
VPTN (ours) PVT v2-B3 94.35 83.4
VPTN (ours) PVT v2-B4 102.06 84.1
VPTN (ours) PVT v2-B5 109.77 86.3
5.2.5 ADE20K
Finally, we present a comparative analysis of generic
semantic segmentation performance on the ADE20K
validation dataset, as detailed in Table 8. VPTN’s
consistently exhibited competitive performance in
terms of mIoU scores while demonstrating a notable
reduction in computational resource requirements
compared to SOTA models, specifically, compared to
the SOTA, OneFormer, we observe an average mIoU
difference of 9.87 percentage-points lower, coupled
with an average computational power (GFLOPs) us-
age of only 2.55%.
Table 8: Performance comparison of the proposed VPTN
with other SOTA methods using the ADE20K validation
dataset. The models utilized varying crop sizes to report
mIoU and GFLOPs, with annotations
1
representing Crop
Size = 640,
2
indicating Crop Size = 896, and
3
denoting
Crop Size = 1280.
Method Encoder GFLOPs mIoU (%)
SegFormer (Xie and et al., 2021) MiT-B0 8.4 38.0
SegFormer (Xie and et al., 2021) MiT-B1 15.9 43.1
SegFormer (Xie and et al., 2021) MiT-B2 62.4 47.5
Mask2Former (Cheng and et al., 2022) ResNet-50 71 49.2
Mask2Former (Cheng and et al., 2022) Swin-T 74 49.6
SegFormer (Xie and et al., 2021) MiT-B3 79.0 50.0
Mask2Former (Cheng and et al., 2022) ResNet-101 90 50.1
SegFormer (Xie and et al., 2021) MiT-B4 95.7 51.1
SegFormer (Xie and et al., 2021) MiT-B5 183.3 51.8
Mask2Former (Cheng and et al., 2022) Swin-B
1
223 55.1
Mask2Former (Cheng and et al., 2022) Swin-L
1
403 57.3
OneFormer (Jain and et al., 2022) DiNAT-L 678
2
58.1
OneFormer (Jain and et al., 2022) DiNAT-L 1369
3
58.2
VPTN (ours) PVT v2-B0 29.53 50.9
VPTN (ours) PVT v2-B1 30.82 51.5
VPTN (ours) PVT v2-B2 32.51 52.6
VPTN (ours) PVT v2-B3 35.55 53.1
VPTN (ours) PVT v2-B4 38.90 54.7
VPTN (ours) PVT v2-B5 42.25 55.3
6 CONCLUSIONS
Our study introduces the VPTN, a novel architec-
ture for semantic segmentation that optimally bal-
ances computational efficiency with advanced per-
formance. The model’s superiority is demonstrated
through comprehensive evaluations across various
datasets and rigorous ablation studies.
Performance benchmarks against SOTA
transformer-based models reveal VPTN’s profi-
ciency. It sets a new SOTA on the BDD100K dataset
with a 0.04% mIoU increase, using only 4.58%
of the previous SOTA’s computational resources.
On CamVid, VPTN improves mIoU by 3.11%. In
Cityscapes and Mapillary Vistas, it closely trails the
current SOTA by merely 1.36 percentage-points,
requiring just 16.9% of their computational power.
Even in the ADE20K dataset, VPTN competes
closely with the current SOTA, OneFormer, with a
9.87% mIoU difference while using a mere 2.55% of
its GFLOPs. VPTN’s ability to strike a compelling
balance between high accuracy and low computa-
tional demand makes it a prime solution for diverse
semantic segmentation challenges, particularly in
urban and generic scene understanding.
ACKNOWLEDGEMENTS
This publication acknowledges the support provided
by the Khalifa University of Science and Technology
under Faculty Start-Up grants FSU-2022-003 Award
No. 8474000401.
Vision-Perceptual Transformer Network for Semantic Scene Understanding
331

REFERENCES
Brostow, G. J. and et al. (2009). Semantic object classes in
video: A high-definition ground truth database. Pat-
tern Recognition Letters, 30.
Chandra, S. and et al. (2018). Deep spatio-temporal random
fields for efficient video segmentation. In Proceedings
of the IEEE Conference on CVPR, pages 8915–8924.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation. In
Proceedings of the European conference on computer
vision (ECCV), pages 801–818.
Cheng, B. and et al. (2020). Panoptic-deeplab: A simple,
strong, and fast baseline for bottom-up panoptic seg-
mentation. In Proceedings of the IEEE/CVF confer-
ence on CVPR, pages 12475–12485.
Cheng, B. and et al. (2022). Masked-attention mask trans-
former for universal image segmentation. In Proceed-
ings of the IEEE/CVF Conference on CVPR, pages
1290–1299.
Chitta, K. and et al. (2022). Transfuser: Imitation with
transformer-based sensor fusion for autonomous driv-
ing. IEEE Transactions on PAMI.
Cordts, M. and et al. (2016). The cityscapes dataset for se-
mantic urban scene understanding. Proceedings of the
IEEE Computer Society Conference (CSC) on Com-
puter Vision and Pattern Recognition (CVPR), 2016-
December.
Dosovitskiy, A. and et al. (2020). An image is worth 16x16
words: Transformers for image recognition at scale.
arXiv preprint arXiv:2010.11929.
Feng, D. and et al. (2020). Deep multi-modal object detec-
tion and semantic segmentation for autonomous driv-
ing: Datasets, methods, and challenges. IEEE T-ITS,
22(3):1341–1360.
Geiger, A. et al. (2012). Are we ready for autonomous driv-
ing? the kitti vision benchmark suite. Proceedings of
the IEEE CSC on CVPR.
Hassan, T. and et al. (2021). Trainable structure tensors
for autonomous baggage threat detection under ex-
treme occlusion. Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial Intel-
ligence and Lecture Notes in Bioinformatics), 12627
LNCS.
He, K. and et al. (2020). Mask r-cnn. IEEE Transactions on
PAMI, 42.
Hua, Z. and et al. (2022). Dual attention based multi-scale
feature fusion network for indoor rgbd semantic seg-
mentation. In 2022 26th International Conference on
Pattern Recognition (ICPR), pages 3639–3644. IEEE.
Jain, J. and et al. (2022). OneFormer: One Transformer to
Rule Universal Image Segmentation. arXiv.
Li, P. and et al. (2019). Stereo r-cnn based 3d object de-
tection for autonomous driving. In Proceedings of the
IEEE/CVF Conference on CVPR, pages 7644–7652.
Li, Z. and et al. (2022). Maskformer with improved
encoder-decoder module for semantic segmentation of
fine-resolution remote sensing images. In 2022 IEEE
ICIP, pages 1971–1975. IEEE.
Liu, H. and et al. (2022). Cmx: Cross-modal fusion for
rgb-x semantic segmentation with transformers. IEEE
Transactions on Intelligent Transportation Systems
(T-ITS).
Liu, Y. and et al. (2020). Efficient semantic video segmen-
tation with per-frame inference. In Computer Vision–
ECCV 2020: 16th European Conference, Glasgow,
UK, August 23–28, 2020, Proceedings, Part X 16,
pages 352–368. Springer.
Nag, S. and et al. (2019). What’s there in the dark. In 2019
IEEE International Conference on Image Processing
(ICIP), pages 2996–3000. IEEE.
Neuhold, G. and et al. (2017). The mapillary vistas dataset
for semantic understanding of street scenes. Proceed-
ings of the IEEE ICCV, 2017-October.
Papadeas, I. and et al. (2021). Real-time semantic image
segmentation with deep learning for autonomous driv-
ing: A survey. Applied Sciences, 11(19):8802.
Siam, M. and et al. (2018). A comparative study of real-time
semantic segmentation for autonomous driving. In
Proceedings of the IEEE conference on CVPR work-
shops, pages 587–597.
Verelst, T. and et al. (2023). Segblocks: Block-based dy-
namic resolution networks for real-time segmentation.
IEEE Transactions on PAMI, 45(2):2400–2411.
Wang, C. Y. et al. (2021). Scaled-yolov4: Scaling cross
stage partial network. Proceedings of the IEEE CSC
on CVPR.
Wang, J. and et al. (2021). Deep high-resolution represen-
tation learning for visual recognition. IEEE Transac-
tions on PAMI, 43(10):3349–3364.
Wang, J. and et al. (2022a). Rtformer: Efficient design
for real-time semantic segmentation with transformer.
arXiv preprint arXiv:2210.07124.
Wang, W. and et al. (2022b). Pvt v2: Improved baselines
with pyramid vision transformer. Computational Vi-
sual Media, 8.
Xiao, T. and et al. (2018). Unified perceptual parsing
for scene understanding. Lecture Notes in Computer
Science (including subseries Lecture Notes in Artifi-
cial Intelligence and Lecture Notes in Bioinformatics),
11209 LNCS.
Xie, E. and et al. (2021). Segformer: Simple and efficient
design for semantic segmentation with transformers.
Advances in Neural Information Processing Systems,
34:12077–12090.
Yin, W. and et al. (2022). The devil is in the labels: Se-
mantic segmentation from sentences. Conference on
CVPR.
Yu, F. et al. (2020). Bdd100k: A diverse driving dataset
for heterogeneous multitask learning. In Proceedings
of the IEEE/CVF conference on CVPR, pages 2636–
2645.
Zheng, S. et al. (2021). Rethinking semantic segmentation
from a sequence-to-sequence perspective with trans-
formers. In Proceedings of the IEEE/CVF conference
on CVPR, pages 6881–6890.
Zhou, B. et al. (2017). Scene parsing through ade20k
dataset. In Proceedings of the IEEE Conference on
CVPR.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
332
