
Sweeping-Based Multi-Robot Exploration in an
Unknown Environment Using Webots
Nirali Sanghvi
1 a
, Rajdeep Niyogi
1 b
and Alfredo Milani
2 c
1
Department of Computer Science and Engineering, Indian Institute of Technology, Roorkee, India
2
Department of Computer Science and Mathematics, University of Perugia, Italy
Keywords:
Exploration, Unknown Environment, Multi-Robot System, Coverage.
Abstract:
In this paper, a sweeping algorithm is proposed with the goal of achieving maximal coverage while minimizing
the overlapping areas, in an unknown environment. Two scenarios are considered: one in which the robots
do not communicate with one another, and another in which the robots are allowed to communicate with
one another. The simulations are performed on Webots, a multi-robot simulator, varying various parameters
like environment size, obstacles, and number of robots and their positions. The coverage obtained with the
proposed approach is 89-98%. When the robots are allowed to communicate, there is a reduction in exploration
time that ranges from a minimum of 33% to a maximum of 68%.
1 INTRODUCTION
Multi-robot systems (MRS) have garnered significant
attention from the research community and engineer-
ing practitioners due to their ability to enhance effi-
ciency and reduce the human workload. These sys-
tems have proven highly valuable in various applica-
tions, such as target searching, structural inspection,
and boundary monitoring, where exploring unknown
environments is a critical challenge (de Almeida et al.,
2019), (Hayajneh and Al Mahasneh, 2022). The
primary objective of exploration is to guide a robot
through unfamiliar or uncharted areas without prior
knowledge or initial parameters. In many practical
scenarios, such as military missions, space explo-
ration, search and rescue efforts (Yanguas-Rojas and
Mojica-Nava, 2017), and agricultural work (Bechar
and Vigneault, 2017), the successful execution of
tasks often relies on effective environmental explo-
ration (Cao et al., 2023). Compared to single-
robot systems, multi-robot systems are frequently em-
ployed in these complex and hazardous contexts. This
preference arises from their notable attributes, includ-
ing robust adaptability, exceptional flexibility, and a
high degree of reliability (Wang et al., 2016). In a
MRS, multiple robots collaborate to achieve a com-
a
https://orcid.org/0009-0003-4245-0587
b
https://orcid.org/0000-0003-1664-4882
c
https://orcid.org/0000-0003-4534-1805
mon goal while pursuing individual tasks within the
same environment (Sabattini et al., 2017).
The challenges in multi-robot coverage can gener-
ally be categorized into two domains: Coverage Path
Planning (CPP) (Galceran and Carreras, 2013) and
Coverage Control problems (Savkin et al., 2015). In
multi-robot CPP, the focus is on designing obstacle-
free paths that enable the accumulation of sensor foot-
prints from the robots to effectively cover a desig-
nated area or volume. Depending on the specific
CPP tasks, efficiency metrics may be defined based on
factors such as coverage percentage (Doitsidis et al.,
2012), and time to completion (Avellar et al., 2015).
On the other hand, in coverage control problems, the
objective is to develop distributed control laws for the
robots that maximize certain coverage criteria, such
as coverage frequency. Initially, sweep coverage was
addressed as a coverage control problem, aiming to
optimize the detection rate of events during periodic
coverage missions within a region (Gage, 1992).
Different strategies have been developed to solve
the exploration problem in an unknown environment
(Sharma and Tiwari, 2016). The most basic method
of exploration is exploring random points in the en-
vironment, say, within some range of the robot. It is
based on randomness of the selection of the points.
Improvised versions of this method involve picking
up certain points. Another method is a frontier-based
method where the boundary between the known and
unknown areas of the environment is explored and
248
Sanghvi, N., Niyogi, R. and Milani, A.
Sweeping-Based Multi-Robot Exploration in an Unknown Environment Using Webots.
DOI: 10.5220/0012343400003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 248-255
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

eventually, the process continues till the entire area
is explored (Sharma and Tiwari, 2016). Another ap-
proach is a human-directed approach wherein humans
can direct the robots based on the information gath-
ered by a graphical user (Sharma and Tiwari, 2016).
One of the strategies is to divide the area into smaller
regions like using Voronoi partitions and then dynam-
ically assign the robots to explore those areas (Hu
et al., 2020). Similarly, sweeping is one of the strate-
gies that is used to achieve exploration and coverage
in an unknown environment.
In this paper, we present a sweeping-based al-
gorithm for maximizing coverage while minimizing
overlapping. We consider two scenarios: one in
which the robots do not communicate with one an-
other, and one in which the robots are allowed to com-
municate with one another. Extensive simulations are
used to examine the impact of communication. A de-
tailed discussion of the similarities and differences
between our approach and some other existing ap-
proaches is given in Section 2.
The rest of this article is structured as follows. Re-
lated work is discussed in Section 2. Section 3 pro-
vides an overview of the simulated environment and
the mobile robots used. The proposed algorithm is
given in Section 4. Simulation results are given in
Section 5. Conclusions are given in Section 6.
2 RELATED WORK
Over the past few decades, numerous researchers
have been interested in the exploration tasks of multi-
robot systems. A significant portion of this work
builds upon the concept of “frontier”, initially pro-
posed in (Yamauchi, 1998). In this context, a frontier
is defined as the boundary that separates unexplored
and explored accessible areas within an unknown en-
vironment, typically represented using an occupancy
grid map. Yamauchi’s pioneering work led to the de-
velopment of a well-known multi-robot exploration
approach, building upon his prior research. This ap-
proach, while effective in its own right, relies on a
somewhat greedy strategy and lacks robust collabo-
ration mechanisms. Consequently, there is a poten-
tial for robots to end up exploring the same frontiers
within the environment inadvertently (Li et al., 2019).
Various strategies have been devised to explore
unknown environments effectively. One approach
involves dividing the area into smaller partitions,
while another popular method employs waypoints
that guide the robot through the entire area (Ka-
malova et al., 2020). Additionally, biologically in-
spired algorithms are presented in (Kamalova et al.,
2020), (de Almeida et al., 2019) that utilize way-
points for exploration. This approach leverages
swarm-based strategies, allowing agents to navigate
efficiently to areas requiring coverage (Atınc¸ et al.,
2020). To handle uncertainty resulting from random
workload distribution, a decentralized workload par-
tition algorithm was introduced in (Zhai and Hong,
2013). This innovative approach entails segmenting
the target region into distinct stripes and ensuring
an equitable distribution of workload across each of
these stripes.
In recent years, some works have approached the
multi-robot sweep coverage problem as a one-time
coverage task, resembling CPP problems, with the
goal of maximizing coverage percentage (Shi et al.,
2018) or minimizing the time required for operation
(Zhai, 2014). Multi-robot sweep coverage is the task
of moving a group of robots to fully cover a des-
ignated region or space (Savkin et al., 2015). In a
broader context, the robots are granted the freedom to
move autonomously, either for one-time or periodic
coverage of a region. Their primary objective is to op-
timize a performance metric, such as coverage rate or
mission duration (Kong et al., 2006), (Senthilkumar
and Bharadwaj, 2012), (Rosalie et al., 2017), (Huang
et al., 2019).
In (Tran et al., 2022), the researchers have imple-
mented a sweeping algorithm for exploration. This
approach is characterized by a swarm-based strategy,
where a group of robots collaboratively explores fron-
tiers within the environment. As one set of fron-
tiers is successfully explored, the swarm moves on
to uncover the next set of frontiers and uses ROS
for the implementation. On a related note, (Zhang
and Noguchi, 2017) developed a multi-robot trac-
tor designed for agricultural tasks, utilizing the same
sweeping algorithm for exploration. Notably, their
approach assumes that all robots have a similar orien-
tation, a condition that aligns with one of the scenar-
ios considered in our algorithm, and they have used
a simulation software named Multi checker, which
is a Windows console application. In (Cao et al.,
2023), the sweeping algorithm is extended to involve
the dynamic division of the environment into distinct
stripes. These stripes are subsequently explored by
robots, thus exploring the environment, using ROS
and MATLAB for their simulations. Orientation same
means all the robots are having a same alignment and
the are also having similar motion. In (Zhang and
Noguchi, 2017), they have used this approach where
the orientation is same. In this paper, the orientation
is different for the robots.
Table 1 provides an overview of the essential char-
acteristics of the referenced studies, drawing com-
Sweeping-Based Multi-Robot Exploration in an Unknown Environment Using Webots
249

Table 1: Comparison of our work with existing works.
Main Characteristics A B C D
Sweeping method Frontier-based Partition-based Orientation same Orientation different
Methodology Swarm MRS MRS MRS
Number of robots 40-80 4-6 3-7 2-5
Communication Implicit Explicit Explicit Explicit
Coverage % 100 - 83-89 89-98
Tool ROS ROS Multi-checker Webots
A: (Tran et al., 2022) B: (Cao et al., 2023) C: (Zhang and Noguchi, 2017) D: In this work
parisons to the present research. It underscores both
commonalities and points of deviation or complemen-
tary features.
• All these works, including our work, adopt a de-
centralized approach.
• All these works, including our work, consider a
continuous environment.
• Our methodology is based on a Multi-Robot Sys-
tem (MRS), whereas (Tran et al., 2022) relies on
a swarm-based approach. In MRS, the number of
robots is limited whereas swarm robotics typically
consists of a large number of robots (Farinelli
et al., 2004). MRS-based approaches use explicit
communication (via the exchange of messages),
whereas swarm robotics use implicit communica-
tion (e.g., via pheromones). Unlike the previously
mentioned works, the existing literature does not
extensively address the potential implications of
communication in the context of exploring un-
known environments.
• Coverage % is indicated as in the papers, and in
(Cao et al., 2023) coverage is not mentioned, it is
shown as ’-’.
• (Tran et al., 2022) implements a frontier-based
sweeping approach. (Cao et al., 2023) employs
a partition-based sweeping approach. Our al-
gorithm involves a general sweeping-based ap-
proach. In (Tran et al., 2022), the number of
robots is dependent on the number of turns of the
sweep-based algorithm, but for our approach, it is
independent of any such parameters.
3 ENVIRONMENT DESCRIPTION
We consider a closed environment that comprises
multiple robots and obstacles of different shapes and
sizes. The environment is represented as a continuous
environment. The robots used are differential drive
robots. The robots interact with the environment and
acquire data through their sensors. This data is uti-
lized for tasks such as collecting samples, images,
etc., all of which ultimately contribute to the process
of exploration. The robots can communicate among
themselves as shown in Figure 6. Robots aim to ex-
plore the environment and minimize the overlapping
of the areas explored by them.
In this work, the robots are considered to be ho-
mogeneous. Obstacles in the environment fall into
two categories: big obstacles and small obstacles. Big
obstacles are defined as those whose dimensions ex-
ceed twice the size of the robot while any other obsta-
cles are categorized as small obstacles; a robot cannot
explore the area occupied by a big obstacle. While
exploring, a robot considers another robot as an ob-
stacle.
This paper uses the open-source robot simulator
Webots (Michel, 2004) for conducting simulations.
Webots is one of the versatile open-source simula-
tors that are available for academic purposes (Ramli
et al., 2015). Several researchers have used Webots
for their research like (Stan and Oprea, 2019), (Han
et al., 2019), (Rangu et al., 2023), etc. For our ex-
periments, we have employed E-puck robots, which
are supported in Webots (Figure 1 (Mondada et al.,
2009)).
Figure 1: E-puck robot (Mondada et al., 2009).
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
250

4 PROPOSED APPROACH
In this section, we present a sweeping-based algo-
rithm, that takes as inputs the initial and goal positions
of a robot.
Algorithm 1: Sweeping Based Algorithm.
Data: initial-position, final-position
Result: Environment is explored
1 current-position := initial-position;
2 while current-position ̸= final-position do
3 s := SWEEP(current-position);
4 current-position := ORIENT(s);
5 SWEEP(position curr) {
6 EXPLORE(curr);
7 curr
′
:= generate-successor(curr);
8 if curr
′
=
/
0 then
9 return curr and exit;
10 else
11 SWEEP(curr
′
) }
The sweep-based algorithm operates as follows:
Initially, we designate the robot’s initial position as
the current position. If the current position does not
match the final position, we invoke the SWEEP func-
tion. The SWEEP function calls the EXPLORE func-
tion that does essential tasks that extends beyond mere
traversal, such as collecting samples or performing
specific actions, as indicated by the context (Nesnas
et al., 2021) at the current position. Once the cur-
rent position has been thoroughly explored, the algo-
rithm proceeds to generate the successor of the cur-
rent position. Generate-successor returns the succes-
sor if one exists, otherwise, it returns an empty set.
SWEEP explores recursively until a new position can-
not be found.
The ORIENT function is responsible for aligning
the robot in the correct direction for the exploration
to continue and then moving it at a distance equal to
twice its sensor range. This step ensures comprehen-
sive coverage of the entire region, leaving no unex-
plored areas in between. Once the ORIENT function
concludes, it returns the point at which the orienta-
tion process ends which is assigned to the current po-
sition. This point is subsequently passed as input to
the SWEEP function, initiating another iteration of the
exploration process. The algorithm continues till it
reaches the goal position and then terminates.
In Figures 2, 3, and 4 we present a detailed step-
by-step illustration of the algorithm’s functioning. Let
us consider a 5 × 5 grid, where each cell represents a
specific location, for the illustration of the algorithm.
The initial position and goal position as shown in
Figure 2 are given as input to the algorithm. Now,
the algorithm starts. First of all, it assigns the initial
position to the current position and checks whether it
is equal to the final position.
Figure 2: Beginning of the sweeping-based algorithm. Ini-
tial location I, Goal location G.
Figure 3: ORIENT function executed. Gray denotes ex-
plored area, Yellow denotes orientation.
Now, if it is not equal to the final position, it en-
ters the while loop. SWEEP function is called with
the current position as the argument. Now, as the
SWEEP function starts, it calls the EXPLORE func-
tion at the current position. EXPLORE function com-
pletes the tasks like collecting samples, collecting
data, etc whatever is assigned to it. Now the generate-
successor function is called to generate the successor
of the current position. As shown in Figure 3, the area
where exploration has been completed is shaded with
gray color. The area where exploration has not yet
been done is shaded in white color.
The SWEEP function continues till generate-
successor does not return an empty set. Then at the
end of the column when generate-successor function
is called, it returns an empty set as there is a boundary
and no further area to explore at that point. So, the
SWEEP function terminates.
Now, the output of the SWEEP function is passed
Sweeping-Based Multi-Robot Exploration in an Unknown Environment Using Webots
251
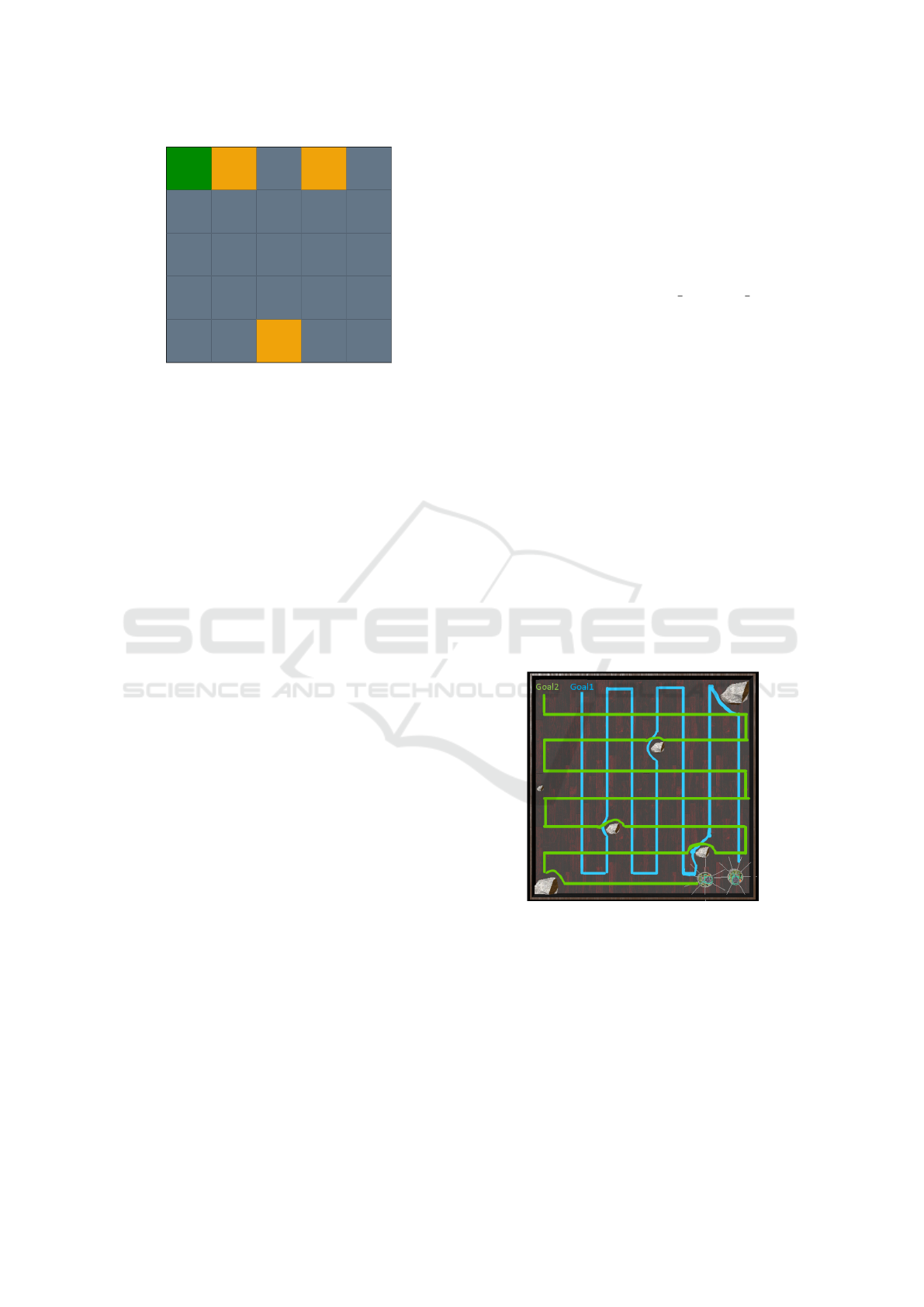
Figure 4: Goal reached and the algorithm terminates.
as an argument to the ORIENT function. ORIENT
changes the orientation of the robot to the point
where we can continue our motion. So, as shown in
Figure 3, the yellow color shows the position where
the ORIENT function has ended and the position is
returned. Now, the position returned is assigned to
the current position and the while loop continues.
Figure 4 shows the end result of our algorithm.
Case 1: The environment has no obstacles. The
algorithm ensures full coverage.
Case 2: The environment has only small obsta-
cles. The algorithm ensures full coverage.
Property of the Algorithm: If the environment
has only small obstacles or no obstacles, the algorithm
ensures complete coverage.
5 SIMULATION RESULTS
In this section, we present the simulation results il-
lustrating the performance of our algorithm. To con-
duct these experiments, we utilized the R2023b ver-
sion of the Webots simulator. The simulations have
been performed on a system with 11
th
Gen Intel(R)
Core(TM) i5-1155G7 processor with 16 GB RAM,
2.5GHz CPU, and 64-bit Windows operating system.
In our simulations, we have explored various scenar-
ios and collected corresponding results. These sim-
ulations encompass a range of parameters, including
environment size, obstacles, the number of robots de-
ployed, and the initial and destination points of the
robots.
For a fixed configuration of the obstacles, the
number of robots is varied. Each configuration of
the obstacles is obtained by randomly placing some
random number of obstacles. The simulations are re-
peated 20 times. Each row of the Tables, given below,
shows the average of the values obtained from the 20
simulations. The environment size is taken as k × k,
where k = 1,2,5, 10 meter. The number of robots de-
ployed n is taken as: n = 2,3,4,5.
Meaning of the Different Parameters:
1. Time: Let t
i
be the time taken by robot i to reach
its goal position from the initial position. T is de-
fined as the maximum time taken by any robot,
i.e., T = max{t
1
,.. .,t
n
}
In the Tables given below, t woc and t wc repre-
sent T without communication and with commu-
nication respectively.
2. Coverage: Let C
i
be the area covered by robot i.
Coverage, denoted by Cg, is the union of the areas
covered by each robot, i.e., Cg =
S
n
i=1
C
i
3. Overlap: It is the same area that is explored by
more than one robot, i.e., the function EXPLORE
is invoked by multiple robots. Overlap is denoted
by Op.
5.1 Without communication
In our first simulation, we consider the scenario where
the robots do not communicate with each other. The
E-puck robot is equipped with eight infrared proxim-
ity sensors strategically positioned around its body.
(Mondada et al., 2009). These sensors play a pivotal
role in gauging the proximity of obstacles within the
robot’s surroundings
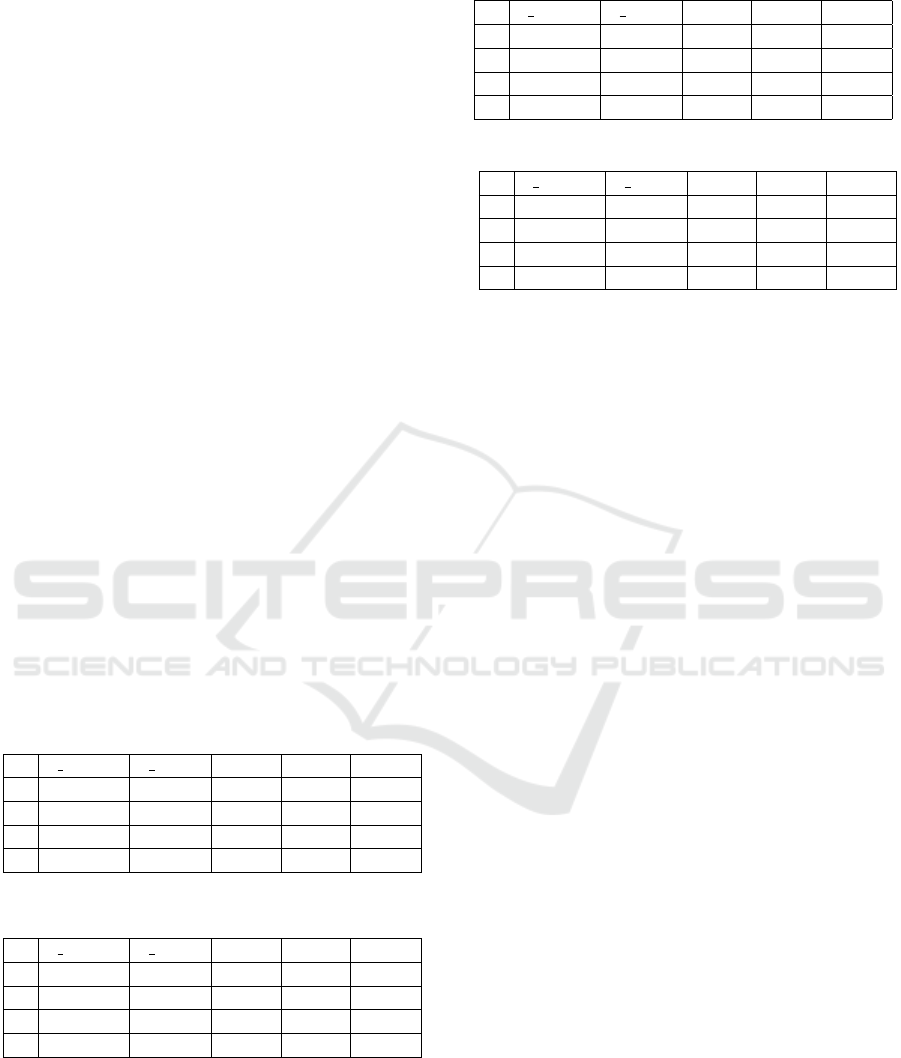
Figure 5: Path of the robots without communication in a
1m × 1m environment.
As illustrated in Figure 5 the path of Robot 1 is
depicted in blue, while the path of Robot 2 is rep-
resented in green. Robot 1 follows a vertical path,
while Robot 2 adopts a horizontal path. The entire
environment is effectively covered by both robots,
demonstrating the comprehensive coverage achieved
through our algorithm. If two robots are just travers-
ing through the same area either to orient or to align
themselves, then it is not considered as overlap.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
252
The robot can dynamically adjust its path to nav-
igate around the obstacle, thereby avoiding collisions
and progressing toward its intended goal. This sensor-
driven adaptive behavior continues until the robot
successfully reaches its predefined destination. The
robot’s turning radius is set at twice the range of its
sensors. This deliberate choice yields excellent cov-
erage results and allows us to effectively navigate
through the environment while avoiding unexplored
gaps between paths.
Figure 5 provides a visual representation of how
the robots interact with the environment. When a
robot encounters an obstacle along its path, it adjusts
its route to bypass the obstacle. The path of Robot 1 is
indicated by the blue line, while the path of Robot 2 is
represented by the green line. This dynamic adapta-
tion ensures that the robots can effectively maneuver
around obstacles while adhering to our algorithm’s
guidelines.
In this phase, we have escalated the complexity by
varying the size of the environment and also increas-
ing the number of robots accordingly. Furthermore,
we have introduced an element of unpredictability by
randomly placing obstacles of varying sizes within
these environments. This comprehensive evaluation
allows us to see how the presence of obstacles impacts
critical metrics, including coverage, overlapping, and
the execution time of the algorithm.
Tables 2, 3, 4, and 5 below are the outcomes de-
rived from these simulations, shedding light on the
algorithm’s performance under these changing condi-
tions.
Table 2: Performance for environment-size 1m ×1m.
n t woc(s) t wc(s) Rd % Cg % Op %
2 0.38 0.12 67.87 93.75 56.25
3 0.50 0.17 65.63 95.31 100
4 0.57 0.22 61.11 96.88 100
5 0.65 0.26 59.87 97.18 100
Table 3: Performance for environment size 2m ×2m.
n t woc(s) t wc(s) Rd % Cg % Op %
2 1.39 0.56 59.71 89.06 78.13
3 1.43 0.63 55.94 92.19 89.06
4 1.49 0.68 54.36 93.75 100
5 1.55 0.71 54.19 95.31 100
In the Tables, n represents the number of robots
used. It can be seen in this experiment where there is
no communication between the robots, there is a lot of
overlapping area which leads to the wastage of com-
putational power and also increases the time taken by
Table 4: Performance for environment size 5m ×5m.
n t woc(s) t wc(s) Rd % Cg % Op %
2 5.10 3.10 39.24 91.25 90.50
3 5.21 3.15 39.48 92.75 95.25
4 5.35 3.38 36.80 95.28 100
5 5.43 3.65 32.71 96.75 100
Table 5: Performance for environment size 10m ×10m.
n t woc(s) t wc(s) Rd % Cg % Op %
2 20.15 12.27 39.11 94.88 95.13
3 21.60 13.35 38.17 95.63 97.56
4 22.86 14.83 35.13 98.13 100
5 24.66 15.53 37.03 98.36 100
the robots to reach their goal positions. Also, it can be
observed that at certain places, the time taken by three
robots is more than the time taken by two robots. This
happens especially in small environments where the
increasing number of robots adds up to the amount of
collision, leading to an increase in the overall amount
of time.
As the number of robots n is increased, the time
taken for exploration, coverage, and overlap also in-
creases. As n is increased, one robot acts as an ob-
stacle for the other, and hence the time increases.
With more robots, more area would be covered, which
means that there would be more overlap.
5.2 With Communication
In these experiments, the robots can communicate
with each other. Figure 6 shows how communication
takes place between the robots. As shown in Figure 6,
as soon as Robot 1 enters the range of Robot 2, they
exchange their identifiers (represented by a unique
number) using the Beacon signals (Gerasenko et al.,
2001). Now, say, Robot 2 has a higher identifier than
Robot 1, then Robot 2 will continue its exploration
for the next step and Robot 1 will change its orienta-
tion and continue as per the algorithm, given in Sec-
tion 4. The objective of these experiments is to assess
the impact of communication in this setting. Figure 7
illustrates the paths the robots will follow in this en-
vironment.
Figure 7 shows the path that will be followed by
Robot 1 and Robot 2 by using communication be-
tween them. It can be seen that there is a significant
amount of reduction in the overlapping areas. There
is no region that is explored more than once. While
changing the orientation, an area may be traversed
by more than one robot but not explored by multiple
robots.
The Tables 2, 3, 4, and 5, given above, should be
Sweeping-Based Multi-Robot Exploration in an Unknown Environment Using Webots
253
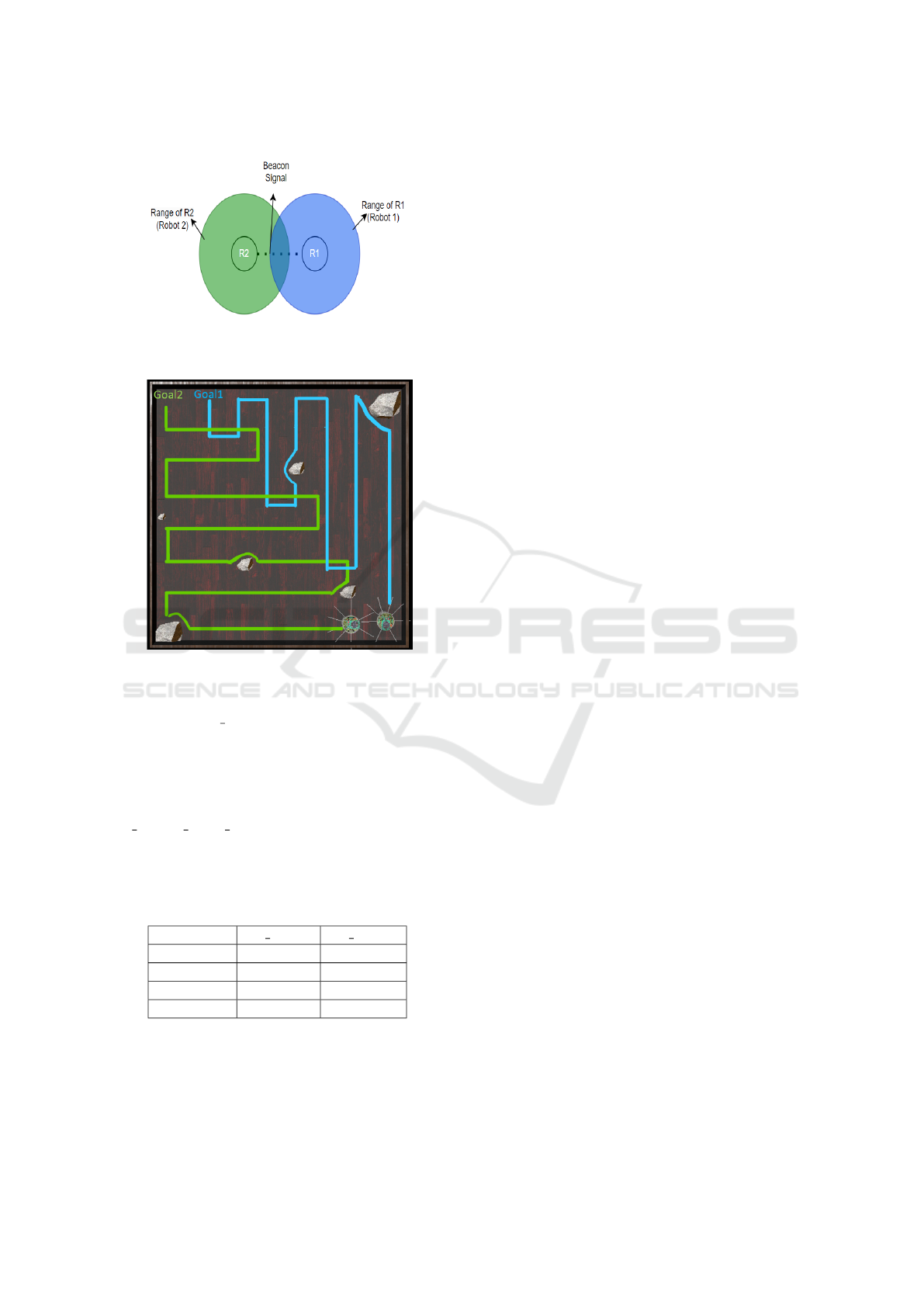
Figure 6: Communication between robots.
Figure 7: Path of the robots with communication in a
1m × 1m environment.
read as follows. t wc is the time taken with communi-
cation. The coverage is the same as without commu-
nication. Now there is no overlap. For different envi-
ronment sizes, the minimum and maximum reduction
in time with respect to the time without communica-
tion is given in Table 6. The reduction is calculated as
((t woc −t wc)/t woc) × 100. From Table 6, we find
that the reduction in exploration time ranges from a
maximum of 68% to a minimum of 33%.
Table 6: Minimum/Maximum time reduction with commu-
nication.
Env-size Rd min % Rd max %
1m × 1m 59.87 67.87
2m × 2m 54.19 59.71
5m × 5m 32.71 39.48
10m × 10m 35.13 39.11
6 CONCLUSIONS
In this paper, a sweeping-based approach is devel-
oped for exploring an unknown environment using
multiple robots. To validate the approach, a multi-
robot simulator, Webots, is used. Extensive simula-
tions were conducted with varying environment sizes,
obstacles, the number of robots deployed, and the ini-
tial and destination location of the robots. The results
demonstrate that the proposed algorithm performs as
expected. The coverage obtained is 89–98%. When
the robots are allowed to communicate, there is a sig-
nificant reduction in exploration time that ranges from
a maximum of 68% to a minimum of 33%. As part of
future work, the scope of the approach in smart farm-
ing would be explored.
ACKNOWLEDGMENT
The authors thank the anonymous reviewers for their
valuable comments that were helpful for improving
the paper. The second author was in part supported
by a research grant from Google.
REFERENCES
Atınc¸, G. M., Stipanovi
´
c, D. M., and Voulgaris, P. G.
(2020). A swarm-based approach to dynamic cov-
erage control of multi-agent systems. Automatica,
112:108637.
Avellar, G. S., Pereira, G. A., Pimenta, L. C., and Is-
cold, P. (2015). Multi-uav routing for area coverage
and remote sensing with minimum time. Sensors,
15(11):27783–27803.
Bechar, A. and Vigneault, C. (2017). Agricultural robots
for field operations. part 2: Operations and systems.
Biosystems engineering, 153:110–128.
Cao, M., Cao, K., Li, X., and Xie, L. (2023). Distributed
control of multirobot sweep coverage over a region
with unknown workload distribution. IEEE Trans-
actions on Systems, Man, and Cybernetics: Systems,
53(10):6503–6515.
de Almeida, J. P. L. S., Nakashima, R. T., Neves-Jr, F., and
de Arruda, L. V. R. (2019). Bio-inspired on-line path
planner for cooperative exploration of unknown envi-
ronment by a multi-robot system. Robotics and Au-
tonomous Systems, 112:32–48.
Doitsidis, L., Weiss, S., Renzaglia, A., Achtelik, M. W.,
Kosmatopoulos, E., Siegwart, R., and Scaramuzza, D.
(2012). Optimal surveillance coverage for teams of
micro aerial vehicles in gps-denied environments us-
ing onboard vision. Autonomous Robots, 33:173–188.
Farinelli, A., Iocchi, L., and Nardi, D. (2004). Multi-
robot systems: a classification focused on coordina-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
254

tion. IEEE Transactions on Systems, Man, and Cy-
bernetics, Part B (Cybernetics), 34(5):2015–2028.
Gage, D. W. (1992). Command control for many-robot sys-
tems. Unmanned Systems Magazine, 10(4):28–34.
Galceran, E. and Carreras, M. (2013). A survey on coverage
path planning for robotics. Robotics and Autonomous
systems, 61(12):1258–1276.
Gerasenko, S., Joshi, A., Rayaprolu, S., Ponnavaikko, K.,
and Agrawal, D. P. (2001). Beacon signals: what,
why, how, and where? Computer, 34(10):108–110.
Han, Q., Sun, S., and Lang, H. (2019). Leader-follower
formation control of multi-robots based on bearing-
only observations. International Journal of Robotics
and Automation, 34(2).
Hayajneh, M. and Al Mahasneh, A. (2022). Guidance, nav-
igation and control system for multi-robot network
in monitoring and inspection operations. Drones,
6(11):332.
Hu, J., Niu, H., Carrasco, J., Lennox, B., and Arvin, F.
(2020). Voronoi-based multi-robot autonomous ex-
ploration in unknown environments via deep rein-
forcement learning. IEEE Transactions on Vehicular
Technology, 69(12):14413–14423.
Huang, L., Zhou, M., Hao, K., and Hou, E. (2019). A sur-
vey of multi-robot regular and adversarial patrolling.
IEEE/CAA Journal of Automatica Sinica, 6(4):894–
903.
Kamalova, A., Kim, K. D., and Lee, S. G. (2020). Way-
point mobile robot exploration based on biologically
inspired algorithms. IEEE Access, 8:190342–190355.
Kong, C. S., Peng, N. A., and Rekleitis, I. (2006). Dis-
tributed coverage with multi-robot system. In Pro-
ceedings 2006 IEEE International Conference on
Robotics and Automation, 2006. ICRA 2006., pages
2423–2429. IEEE.
Li, G., Zhang, D., and Shi, Y. (2019). An unknown envi-
ronment exploration strategy for swarm robotics based
on brain storm optimization algorithm. In 2019 IEEE
Congress on Evolutionary Computation (CEC), pages
1044–1051. IEEE.
Michel, O. (2004). Cyberbotics ltd. webots™: professional
mobile robot simulation. International Journal of Ad-
vanced Robotic Systems, 1(1):5.
Mondada, F., Bonani, M., Raemy, X., Pugh, J., Cianci, C.,
Klaptocz, A., Magnenat, S., Zufferey, J.-C., Floreano,
D., and Martinoli, A. (2009). The e-puck, a robot de-
signed for education in engineering. In Proceedings of
the 9th conference on autonomous robot systems and
competitions, volume 1, pages 59–65. IPCB: Instituto
Polit
´
ecnico de Castelo Branco.
Nesnas, I. A., Fesq, L. M., and Volpe, R. A. (2021). Auton-
omy for space robots: Past, present, and future. Cur-
rent Robotics Reports, 2(3):251–263.
Ramli, N. R., Razali, S., and Osman, M. (2015). An
overview of simulation software for non-experts to
perform multi-robot experiments. In 2015 Interna-
tional Symposium on Agents, Multi-Agent Systems
and Robotics (ISAMSR), pages 77–82.
Rangu, G., Kulkarni, D. D., Nair, J. S., and Nair, S. B.
(2023). A hybrid federated reinforcement learning ap-
proach for networked robots. In International Confer-
ence on Science, Technology and Engineering, pages
493–500. Springer.
Rosalie, M., Dentler, J. E., Danoy, G., Bouvry, P., Kan-
nan, S., Olivares-Mendez, M. A., and Voos, H. (2017).
Area exploration with a swarm of uavs combining de-
terministic chaotic ant colony mobility with position
mpc. In 2017 International Conference on Unmanned
Aircraft Systems (ICUAS), pages 1392–1397. IEEE.
Sabattini, L., Secchi, C., and Fantuzzi, C. (2017). Multi-
robot systems implementing complex behaviors under
time-varying topologies. European Journal of Con-
trol, 38:73–87.
Savkin, A. V., Cheng, T. M., Xi, Z., Javed, F., Matveev,
A. S., and Nguyen, H. (2015). Decentralized cover-
age control problems for mobile robotic sensor and
actuator networks. John Wiley & Sons.
Senthilkumar, K. and Bharadwaj, K. K. (2012). Multi-
robot exploration and terrain coverage in an unknown
environment. Robotics and Autonomous Systems,
60(1):123–132.
Sharma, S. and Tiwari, R. (2016). A survey on multi
robots area exploration techniques and algorithms.
In 2016 International Conference on Computational
Techniques in Information and Communication Tech-
nologies (ICCTICT), pages 151–158. IEEE.
Shi, M., Qin, K., and Liu, J. (2018). Cooperative multi-
agent sweep coverage control for unknown areas of
irregular shape. IET Control Theory & Applications,
12(14):1983–1994.
Stan, A.-C. and Oprea, M. (2019). A case study of multi-
robot systems coordination using pso simulated in we-
bots. In 2019 11th International Conference on Elec-
tronics, Computers and Artificial Intelligence (ECAI),
pages 1–5. IEEE.
Tran, V. P., Garratt, M. A., Kasmarik, K., Anavatti, S. G.,
and Abpeikar, S. (2022). Frontier-led swarming: Ro-
bust multi-robot coverage of unknown environments.
Swarm and Evolutionary Computation, 75:101171.
Wang, D., Wang, H., and Liu, L. (2016). Unknown
environment exploration of multi-robot system with
the fordpso. Swarm and Evolutionary Computation,
26:157–174.
Yamauchi, B. (1998). Frontier-based exploration using mul-
tiple robots. In Proceedings of the second interna-
tional conference on Autonomous agents, pages 47–
53.
Yanguas-Rojas, D. and Mojica-Nava, E. (2017). Explo-
ration with heterogeneous robots networks for search
and rescue. IFAC-PapersOnLine, 50(1):7935–7940.
Zhai, C. (2014). Sweep coverage of discrete time multi-
robot networks with general topologies. Kybernetika,
50(1):19–31.
Zhai, C. and Hong, Y. (2013). Decentralized sweep cover-
age algorithm for multi-agent systems with workload
uncertainties. Automatica, 49(7):2154–2159.
Zhang, C. and Noguchi, N. (2017). Development of a multi-
robot tractor system for agriculture field work. Com-
puters and Electronics in Agriculture, 142:79–90.
Sweeping-Based Multi-Robot Exploration in an Unknown Environment Using Webots
255
