
Pre-Training and Fine-Tuning Attention Based Encoder Decoder
Improves Sea Surface Height Multi-Variate Inpainting
Th
´
eo Archambault*
1,2 a
, Arthur Filoche
1,3 b
, Anastase Charantonis
4,5 c
and Dominique B
´
er
´
eziat
1 d
1
Sorbonne Universit
´
e, CNRS, LIP6, Paris, France
2
Sorbonne Universit
´
e, LOCEAN, Paris, France
3
UWA, Perth, Australia
4
ENSIIE, LaMME, Evry, France
5
Inria, Paris, France
Keywords:
Image Inverse Problems, Deep Neural Network, Spatiotemporal Inpainting, Multi-Variate Observations,
Transfer Learning, Satellite Remote Sensing.
Abstract:
The ocean is observed through satellites measuring physical data of various natures. Among them, Sea Surface
Height (SSH) and Sea Surface Temperature (SST) are physically linked data involving different remote sensing
technologies and therefore different image inverse problems. In this work, we propose to use an Attention-
based Encoder-Decoder to perform the inpainting of the SSH, using the SST as contextual information. We
propose to pre-train this neural network on a realistic twin experiment of the observing system and to fine-tune
it in an unsupervised manner on real-world observations. We show the interest of this strategy by comparing
it to existing methods. Our training methodology achieves state-of-the-art performances, and we report a
decrease of 25% in error compared to the most widely used interpolations product.
1 INTRODUCTION
In the past decades, satellite remote sensing pro-
duced an unprecedented amount of data, which led
to a deeper understanding of the Earth system. For
instance, out of the 50 essential climate variables
defined by the Global Climate Observing System
(GCOS) 26 are estimated through satellite (Yang
et al., 2013). In the field of oceanography, satellites
are used to measure various ocean surface variables,
such as height, temperature, ice fraction, or chloro-
phyll concentration. The nature of sea-surface satel-
lite observations requires solving various image in-
verse problems, such as inpainting, super-resolution,
denoising, etc.
In this study, we focus on the inpainting of the
Sea Surface Height (SSH), which is a very important
variable of the ocean state, as it is used to retrieve sur-
face currents through the geostrophic approximation.
The altimeters embarked in satellites measure their
a
https://orcid.org/0000-0001-8051-0534
b
https://orcid.org/0000-0001-7779-6105
c
https://orcid.org/0000-0003-4953-2684
d
https://orcid.org/0000-0003-1444-8212
distance to the sea surface through the return time of
a radar pulse. Because of this technique, the nadir-
pointing altimeters sensors are only able to take mea-
sures vertically, along their ground tracks (Martin,
2014). Therefore, producing a fully grided map of the
SSH is a challenging spatiotemporal inpainting prob-
lem. It is currently tackled by the Data Unification
and Altimeter Combination System, DUACS, (Taburet
et al., 2019) which is a linear optimal interpolation of
the along-track data from several satellites (Brether-
ton et al., 1976). However, prior works show that
DUACS produces overly smooth maps, and is miss-
ing a lot of small structures and eddies (Amores et al.,
2018; Stegner et al., 2021). To enhance the quality
of this reconstruction, we are interested in exploiting
contextual variables physically related to SSH, and
with a similar or finer resolution. Among different
possibilities, Sea Surface Temperature (SST) is linked
to surface currents, as the heat is passively transported
by oceanic circulation, and is acquired through direct
infrared measures leading to images with higher spa-
tiotemporal sampling.
In the last years, deep learning has emerged as one
of the leading methods to solve image inverse prob-
100
Archambault, T., Filoche, A., Charantonis, A. and Béréziat, D.
Pre-Training and Fine-Tuning Attention Based Encoder Decoder Improves Sea Surface Height Multi-Variate Inpainting.
DOI: 10.5220/0012357400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
100-109
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

lems (McCann et al., 2017) and specifically inpainting
problems (Jam et al., 2021; Qin et al., 2021). Their
flexibility allows neural networks to include contex-
tual information such as SST, and several studies con-
clude that using it in a multi-variate neural network
leads to a significant improvement of the SSH recon-
struction (Nardelli et al., 2022; Fablet et al., 2023;
Thiria et al., 2023; Martin et al., 2023; Archambault
et al., 2023). However, training neural networks usu-
ally requires pairs of ground truth and observations
which we lack in real-world situations. To overcome
this limitation, previous works have examined two
main strategies: training the network on a realist sim-
ulation of the observing system (Fablet et al., 2023)
or using loss functions not requiring ground truth (Ar-
chambault. et al., 2023; Martin et al., 2023; Archam-
bault et al., 2023). As the first method entirely relies
on the realism of the twin experiment its application
to real-world observations suffers from a domain gap,
especially for multi-variate approaches. To this day,
if the feasibility of training SSH-only networks on
simulation alone has been demonstrated to be possi-
ble (Fablet et al., 2023), transferring multi-variate ap-
proaches has never been successfully performed. On
the other hand, our previous work (Archambault et al.,
2023) shows that the method trained using only obser-
vations suffers from a drop in performance compared
to fully supervised ones.
In this work, we are interested in combining the
advantages of these two methods. We propose to per-
form a pre-training on a multi-variate simulation of
the observing system, and a fine-tuning using only
real-world observations. This paper is structured as
follows: first, we introduce the different data used
in this study and present the inpainting methods.
Then we compare the different learning strategies and
present a benchmark of this application.
2 DATA
2.1 Observing System Simulation
Experiment
In geosciences, one of the major difficulties is that the
ground truth we aim to estimate is often inaccessi-
ble. To understand the impact of observation systems
on the reconstruction process, researchers employ a
method known as the Observing System Simulation
Experiment (OSSE). This technique involves simu-
lating the observation operator on a physical simula-
tion, in our case to replicate realistic satellite measure-
ments. The oceanographic community widely uses
it as it provides ways to test reconstruction methods
and errors (Amores et al., 2018; Stegner et al., 2021;
Gaultier et al., 2016). In this context, we use the
SSH and SST variables from a realistic simulation
as the ground truth upon which we simulate satellite
measures. In this study, we select a portion of the
North Atlantic Ocean (from latitudes 33° to 43° and
longitudes -65° to -55°) of the Global Ocean Physi-
cal Reanalysis, GLORYS (CMEMS, 2020). We re-
trieve 7194 daily images of data starting from Mars
20, 2000 to December 29, 2019. Hereafter, we call X
the ground truth variable, H our simulated observing
operator, and Y = H (X) their associated simulated
observations. Following our previous work (Archam-
bault et al., 2023), we present a multivariate OSSE
with enough pairs of observations and ground truth to
train a neural network.
2.1.1 Sea Surface Height
The nadir-pointing SSH observations are localized on
a precise spatiotemporal support (denoted Ω) which
we want to reproduce in our OSSE. Using the support
from the Copernicus sea level real-world observa-
tions (CMEMS, 2021), and the ground truth data X
ssh
from GLORYS we simulate SSH observations Y
ssh
as
the trilinear interpolation of X
ssh
on each point of the
support. We add an instrumental error ε ∼ N (0, σ)
with σ = 1.9cm, which is the distribution used in the
Ocean data challenge 2020 (CLS/MEOM, 2020). The
SSH observing system is thus defined as follows:
Y
ssh
= H
ssh
X
ssh
, Ω
+ ε (1)
where H
ssh
SSH observation operator. An example
of these simulated along-track measurements is pre-
sented in Figure 1.
2.1.2 Sea Surface Temperature
SST remote sensing relies on direct infrared measure-
ments, enabling broader coverage but making the data
susceptible to cloud interference. To address gaps left
by the clouds, the oceanographic community merges
the images taken by several satellites through linear
interpolation. The interpolated images present artifi-
cially smoothed structures in thick cloud regions. We
simulate this process as follows:
Y
sst
= H
sst
X
sst
,C
(2)
= (1 − C) ⊙
X
sst
+ ε
+C ⊙ G
σ
⋆
X
sst
+ ε
where ⊙ is the element-wise product, ⋆ the convo-
lution product, ε is a white Gaussian noise image of
size 32 × 32 linearly upsampled to a 128× 128 image,
and C is the cloud cover (1 when a cloud is present
and 0 elsewhere). We first add ε to the SST ground
Pre-Training and Fine-Tuning Attention Based Encoder Decoder Improves Sea Surface Height Multi-Variate Inpainting
101
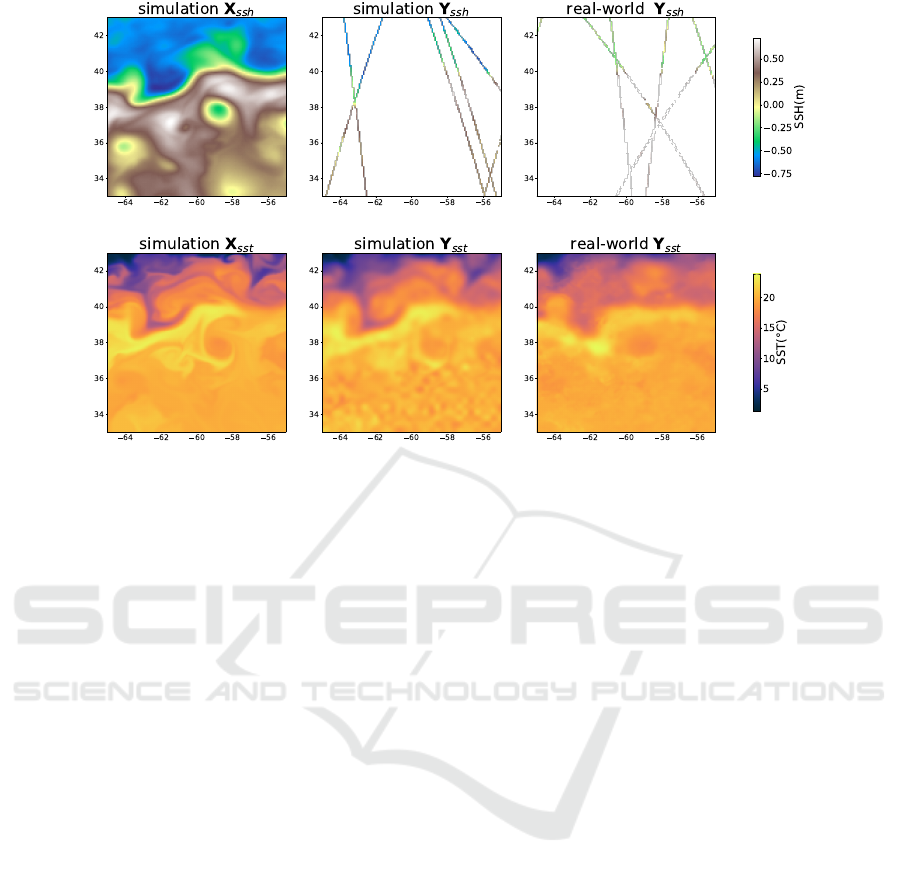
Figure 1: Daily example of SSH and SST data. The first column is the ground truth from the physical model, the second
column is our simulation of the observations, and the last is the real-world satellite data.
truth to simulate the instrumental error, and then per-
form a Gaussian blur with a kernel G
σ
(σ = 16km).
This smoothing is then applied only when clouds are
present, to mimic in-equal spatial resolution of the
satellite SST images. H
sst
adds a noise with a stan-
dard deviation of 0.5°C out of the 4.96°C of the SST
standard deviation.
2.2 Real-World Data
For SSH real-world data we propose to use the
ungrided data used as inputs of the DUACS pro-
tocol (CMEMS, 2021). Concerning SST data,
we use the Multiscale Ultrahigh Resolution (MUR)
SST (NASA/JPL, 2019). These products in cloud-
free, as missing values are inpainted using a linear
optimal interpolation, which leads to a smoothing of
high spatial frequencies when could are present.
3 PROPOSED METHOD
To exploit the temporal coherence of the sparsely ob-
served ocean structures, we propose to perform the
SSH inpainting on a time series of 21 daily images.
The neural network f
θ
estimates the SSH fields
ˆ
X
ssh
from observations Y, which could be Y
ssh
for SST-
agnostic networks or (Y
ssh
, Y
sst
) for SST-aware net-
works. Y
ssh
, Y
sst
,
ˆ
X
ssh
have the same size (21 images
of size 128 by 128).
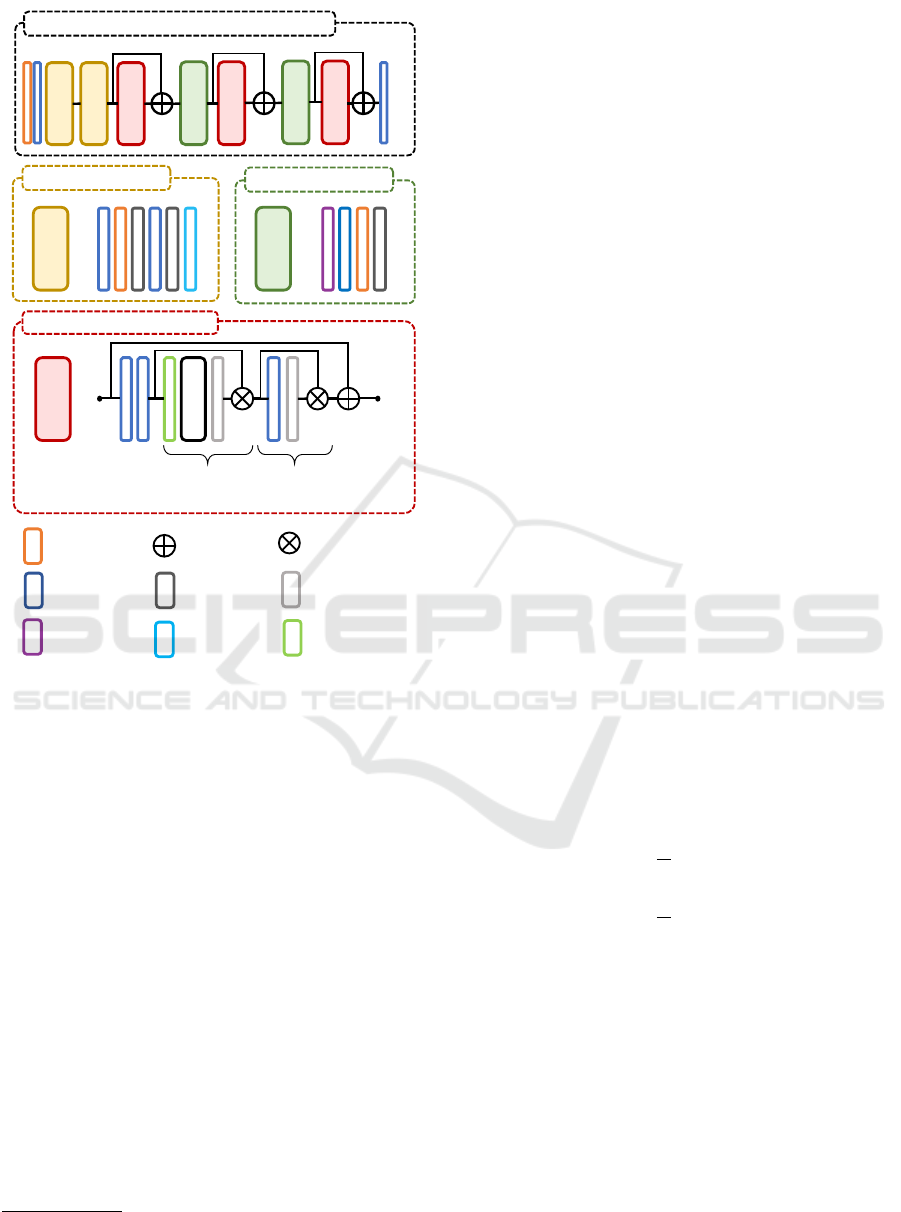
3.1 Architecture
Following our previous work (Archambault et al.,
2023) we propose to use an Attention Based Encoder
Decoder (ABED) to perform the inpainting. The ar-
chitecture of the network is presented in Figure 2. It
starts with two encoding blocks that divide the spatial
dimensions of the images by 2. Then spatiotemporal
attention and decoding blocks are performed succes-
sively to get back to the original size. This mechanism
allows the network to highlight essential features in
the input images such as oceanic eddies, while reduc-
ing the importance of irrelevant ones such as cloudy
areas for instance. Attention modules are widely used
in many computer vision tasks including image in-
painting (Guo et al., 2021) and can be transposed to
geoscience applications (Che et al., 2022; Archam-
bault et al., 2023). Furthermore, the nature of atten-
tion modules is well suited to fine-tuning as irrelevant
pre-trained filters can easily be weighed with small
values during the refitting of attention layers.
Our spatiotemporal attention block is divided into
two steps: temporal and spatial attention. Our ap-
proach follows the Convolutional Block Attention
Module (CBAM) principle introduced by (Woo et al.,
2018), which proposed to compute consecutively
channel and spatial attention. We adapt this concept
to spatiotemporal data by integrating temporal infor-
mation into the channel attention mechanism. The
temporal attention begins by computing the spatial
average for each channel and instant, resulting in a
tensor of dimensions C × T , where C denotes the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
102
=
Encoder block
=
Decoder block
x4
x2
x1
Attention Based Encoder Decoder
x1
=
MLP
Spatial
attention
Temporal
attention
Attention block
Conv3D
Batchnorm
ReLU
Maxpool
Bilinear
upsampling
Spatial
Average
Residual
addition
Hadamard
product
Sigmoid
Figure 2: Overview of the Attention-Based-Encoder-
Decoder. The network starts with two encoding blocks each
dividing the spatial dimensions of the images by 2. Atten-
tions modules are then performed, followed by a residual
connection and a decoding block.
number of channels and T represents the length of
the time series. We then apply a two-layer perceptron
with shared weights across all time steps followed by
a sigmoid activation. The resulting tensor has values
between 0 and 1 and we multiply it to the input ten-
sor to perform temporal attention. To proceed with
spatial attention, we use a 3-dimensional convolution,
where the kernel’s temporal size equals the length of
the time series. We also use a sigmoid activation to
obtain a 2D image between 0 and 1 before multiply-
ing with the input tensor. Subsequently, a residual
skip connection is computed. This described block is
iteratively applied 4 times for the first block, 2 times
for the second block, and once for the final block as
Figure 2 shows
1
.
1
Our implementation and training data are available
here: https://gitlab.lip6.fr/archambault/visapp2024
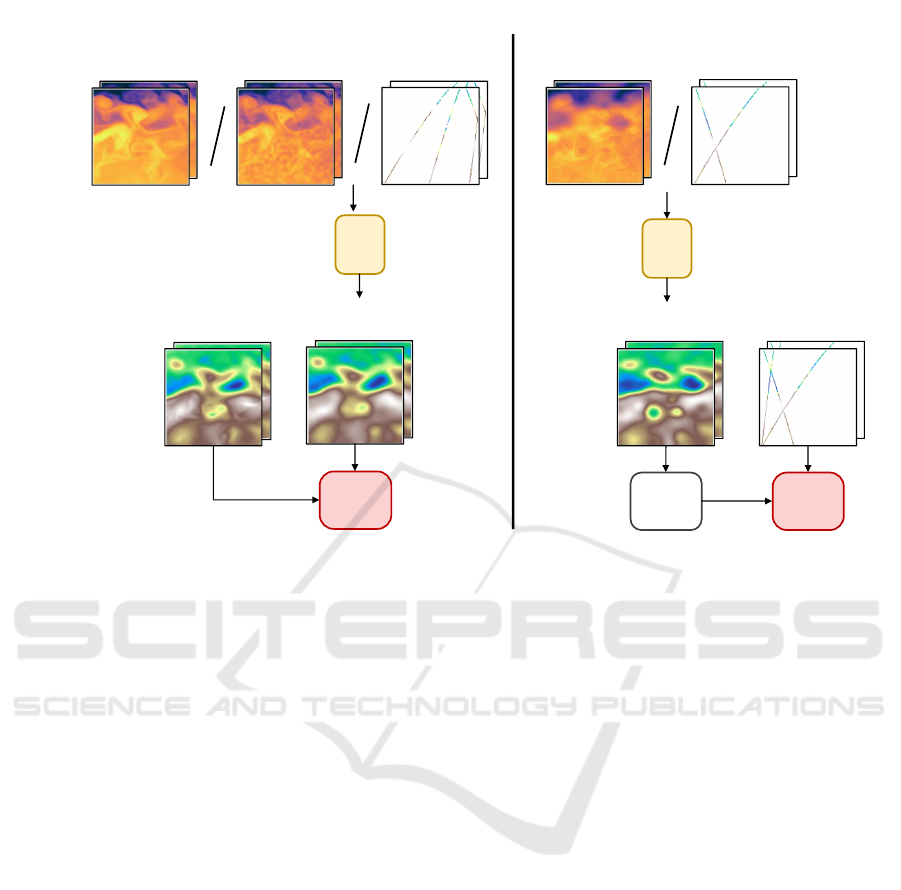
3.2 Loss Functions
We propose two loss functions to train this neural net-
work. The first method takes the Mean Square Er-
ror (MSE) on the entire image in a supervised fash-
ion. This is applicable exclusively in the OSSE setting
where we have access to the ground truth during train-
ing. The second approach uses an unsupervised loss
function, enabling training in scenarios where only
observations are accessible. Figure 3 gives a visual
overview of the two training methods.
We detail hereafter the unsupervised loss function.
Prior studies suggest that it is possible to perform the
SSH interpolation from observations only. Using a
spatiotemporal Deep Image Prior strategy (Ulyanov
et al., 2017), meaning overfiting observations from a
white noise, (Filoche et al., 2022) showed that if cho-
sen correctly, the architecture of the neural network
acts as a regularization that outperforms DUACS. Fol-
lowing the same principle (Archambault. et al., 2023)
estimated an SSH map from gridded SST images on
one year of data. One of the major limitations of these
two methods is that they need to be refitted if ap-
plied to unseen data which makes them extremely in-
efficient computationally speaking. To overcome this
limitation, (Archambault et al., 2023; Martin et al.,
2023) proposed to train the neural network in a way
that doesn’t require refitting and that enables the use
of contextual information such as SST.
To train the neural network in a context where
only observations are available, we apply the ob-
serving operator H
ssh
on the estimate field
ˆ
X
ssh
=
f
θ
(Y
ssh
) before computing the MSE. This allows us
to get back to the observation domain where we have
data to constrain the method. The unsupervised loss
function is defined as follows:
L
unsup
(Y
ssh
,
ˆ
X
ssh
) =
1
N
∑
k
Y
ssh
k
− H
ssh
(
ˆ
X
ssh
)
k
2
=
1
N
∑
k
Y
ssh
k
−
ˆ
Y
ssh
k
2
(3)
N is the number of SSH samples in the observation
vector Y
ssh
and
ˆ
Y
ssh
is the estimation of the obser-
vations. To ensure that the network produces a valid
estimation outside of the SSH measures given as in-
puts, we leave aside the data from one satellite (out of
three to six satellites depending on the period) from
the neural network’s inputs. In Figure 3 we call this
input vector Y
ssh
in
. The network is then controlled on
all the observations, the ones given in input and the
left-aside. Therefore, to accurately estimate the with-
held observations, the network is forced to generalize
well on the whole image.
Pre-Training and Fine-Tuning Attention Based Encoder Decoder Improves Sea Surface Height Multi-Variate Inpainting
103
𝑓
𝜃
𝑿
𝑠𝑠ℎ
Input
𝒀
𝑠𝑠𝑡
𝑿
𝑠𝑠𝑡
𝒀
𝑠𝑠ℎ
Training on simulation
𝒀
𝑠𝑠𝑡
𝑿
𝑠𝑠ℎ
𝒀
𝑠𝑠ℎ
M𝑆𝐸
𝑓
𝜃
ℋ
𝑠𝑠ℎ
Training on observations
M𝑆𝐸
𝑿
𝑠𝑠ℎ
Neural network
Estimation
Loss
𝒀
𝑠𝑠ℎ
𝑖𝑛
Figure 3: Computational graph of the two different training methods. In the supervised simulation situation (left) the neural
network f
θ
takes as inputs either Y
ssh
alone, Y
ssh
and Y
sst
, or Y
ssh
and X
sst
. The network is then controlled in a supervised
manner. In the real-world observations framework (right), only a portion of satellite measures is passed to the network inputs
(Y
ssh
i
) with the SST optionally. The observing operator H
ssh
is then applied to the estimation
ˆ
X
ssh
so that the network can be
controlled at the location where we have access to observations only.
3.3 Training Procedures
Using the two losses given in Section 3.2 and the two
datasets described in Section 2 several training and
fine-tuning strategies are possible.
First, we can perform a supervised training on
the OSSE data, and directly infer real-world data.
This approach was tested by (Fablet et al., 2023) and
has the advantage of being straightforward, but could
suffer from the domain gap between the simulation
and the real world. Specifically, (Fablet et al., 2021)
achieved the training from SSH-only observations,
but, to this day, no SST-using method has successfully
been transferred to real-world data.
Another possibility is to train on real-world obser-
vations only using the loss described in Equation 3.
This approach was tested by (Archambault. et al.,
2023; Martin et al., 2023) which successfully in-
cluded SST information in SSH inpainting. How-
ever, comparing supervised and unsupervised meth-
ods on this OSSE, our previous work shows a signif-
icant drop in reconstruction performances for the un-
supervised interpolations (Archambault et al., 2023).
To benefit from the supervised training on simu-
lated data without suffering from the domain gap, we
propose to pre-train ABED on the OSSE and to fine-
tune it on real-world data. In the pre-training step,
we test three input settings: Y
ssh
for SST-agnostics
networks, (Y
ssh
, Y
sst
) for networks pre-trained with
SST observations, and (Y
ssh
, X
sst
) for networks pre-
trained using SST ground truth. Specifically, com-
paring methods pre-trained with X
sst
or Y
sst
will
help us to understand the impact of our OSSE. How-
ever, while training directly from observations or fine-
tuning, only Y
sst
is available, therefore we refit every
network using the same SST observations.
3.4 Training Details
Train, Validation, Test Split. The dataset is parti-
tioned as follows: we use the year 2017 for testing,
and we validate our methods on three periods: (1)
from July 14, 2002, to July 28, 2003, (2) from Jan-
uary 5, 2008, to January 18, 2009, and (3) from June
28, 2013, to July 13, 2014. The remaining data is
used for training, except for 15-day periods set aside
to prevent data leakage on the validation or the test
set. The partition is the same for the OSSE data and
the real-world data.
Normalization and Preprocessing. We center and
reduce the data of the neural network using the mean
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
104

Table 1: Scores of the 10-member ensemble of the ABED inpainting. We test the following learning methods: “Observations”
(trained only with real-world data), “Simulation” (trained only with simulated data), and “Both” (pre-trained on simulation
and fine-tuned on real-world data). When the network is pre-trained using X
sst
it is still fine-tuned with Y
sst
.
Learning method
Input data
Y
ssh
Y
ssh
+ Y
sst
Y
ssh
+ X
sst
µ σ
t
λ
x
µ σ
t
λ
x
µ σ
t
λ
x
Observation 6.52 1.95 111 6.13 1.84 104 — — —
Simulation 6.35 1.9 112 6.2 1.87 108 6.85 2.22 111
Both 6.27 1.85 110 5.77 1.64 102 5.77 1.6 103
and standard deviation of the training data. We grid
SSH along-track data to a series of images of size
21 × 128 × 128, and we set every pixel without in-
formation to 0. We subtract to the daily SST images
the seasonal mean of SST, i.e. the mean of SST maps
across all years in our training dataset, taken for this
day of the year.
Optimization. We use the ADAM opti-
mizer (Kingma and Ba, 2017), with a starting
learning rate of 5.10
−5
and a multiplicative decay of
0.99. While fine-tuning, the initial learning rate is set
to 10
−5
and the decay to 0.9.
Ensemble. To address the sensitivity of neural net-
work optimization to weight initialization, we adopt
an ensemble strategy by training ten networks for
each configuration. Referred to as the “Ensemble es-
timation”, this approach involves averaging the SSH
maps generated by the networks. The Ensemble esti-
mation usually produces better estimations than each
member separately (Hinton and Dean, 2015), and
specifically for SSH estimation (Archambault et al.,
2023; Archambault. et al., 2023; Filoche et al., 2022).
4 RESULTS
4.1 Comparison of the Different
Methods
In the following analysis, we compare ABED interpo-
lations based on two distinct criteria: the learning ap-
proach employed and the input data. The comparison
involves three learning methodologies: unsupervised
learning on observations only, training on simulated
data with a direct inference on real-world data, and
a hybrid approach involving pre-training on simula-
tion and fine-tuning on observations. Simultaneously,
we evaluate three distinct sets of inputs: SSH-only,
SSH and noised SST, and SSH and SST ground truth
(a configuration only possible while training on sim-
ulation). We evaluate all methods on the along-track
data from a satellite left aside from the inputs. To be
coherent with some of the interpolations of the ocean
data challenge (CLS/MEOM, 2021), the evaluation is
done on a smaller area than the one used for training
(from 34° to 42° North and -65° to -55° West). We
want to stress that the data used for the evaluation are
not used as inputs by any of these methods and present
an instrumental white noise with a standard deviation
from 2 to 3 cm. We still evaluate with this data keep-
ing in mind that the noise is leading to overestimating
the errors of the methods.
We consider Root Mean Squared Error (RMSE)
on the independent satellite data and compute µ,
its temporal mean, and σ
t
, its temporal standard
deviation. We also compute the spatial power density
spectrum (PSD) of the error and of the independent
data and retrieve λ
x
(in km), the wavelength where
the PSD of the error equals the PSD of the reference.
It can be seen as the smallest wavelength that is at
least half resolved by the interpolation method. For
further details about the implementation of λ
x
, we
refer the reader to (Le Guillou et al., 2020). Table 1
presents the scores of the different settings.
Is Our OSSE Realistic? Through this experiment,
we are able to assess the realism of our OSSE on SSH
and SST simulated observations. When examining
the SSH-only methods, we find a substantial improve-
ment in the methods trained on simulation compared
to the ones trained on the observations alone. Fine-
tuning also leads to a reconstruction improvement
although smaller than the one brought by the pre-
training. We conclude that the SSH observations are
correctly simulated. However, the SST-aware meth-
ods trained on real-world data perform better than the
one trained on simulation and even more so for the
one trained using the SST ground truth. This under-
lines the fact that the SST noise is not perfectly sim-
ulated, even if it is still more realistic than the ground
truth SST. We also see that the two SST methods
achieve very similar performances after being fine-
tuned, this shows that given an efficient transfer learn-
ing strategy, we do not necessarily need to pre-train
the network in a realistic setting. This point will be
further discussed in Section 5.2.
Pre-Training and Fine-Tuning Attention Based Encoder Decoder Improves Sea Surface Height Multi-Variate Inpainting
105

Table 2: Benchmark of the interpolations provided by (CLS/MEOM, 2021), including methods using SST or not, using neural
networks or not (NN), with different learning strategies. ABED interpolations are given for the pre-trained and fine-tuned
version using SSH or SST.
Method SST NN Learning µ(cm) σ
t
(cm) λ
x
(km)
DUACS ✗ ✗ ✗ 7.66 2.66 138
DYMOST ✗ ✗ ✗ 6.75 2.00 121
MIOST ✗ ✗ ✗ 6.75 2.00 121
BFN ✗ ✗ ✗ 7.46 2.59 114
4DVarNet ✗ ✓ simulation 6.56 1.84 104
MUSTI ✓ ✓ observation 6.26 1.96 107
ConvLTSM-SSH ✗ ✓ observation 6.82 1.86 108
ConvLTSM-SSH-SST ✓ ✓ observation 6.29 1.60 102
ABED-SSH ✗ ✓ both 6.27 1.85 110
ABED-SSH-SST ✓ ✓ both 5.74 1.61 102
64 62 60 58 56
34
36
38
40
42
DUACS
64 62 60 58 56
34
36
38
40
42
ABED-SSH
64 62 60 58 56
34
36
38
40
42
ABED-SSH-SST
64 62 60 58 56
34
36
38
40
42
64 62 60 58 56
34
36
38
40
42
64 62 60 58 56
34
36
38
40
42
0.2
0.0
0.2
0.4
0.6
0.8
1.0
SSH(m)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
SSH
1e 8
Figure 4: Estimated SSH maps from DUACS, ABED-SSH, ABED-SSH-SST and the norm of their spatial gradient. We plot the
trajectory of the satellite used for evaluation in Figure 5.
4.2 Comparison with State-of-the-Art
Data
We access the performance of our method by compar-
ing the ABED pre-trained and fine-tuned inpaintings
to the state-of-the-art interpolations methods, on the
left-aside satellite data. The benchmarked methods
include DUACS, the most widely used product in oper-
ational applications (Taburet et al., 2019). We include
three physic-based data assimilation schemes: DY-
MOST (Ubelmann et al., 2016; Ballarotta et al., 2020),
MIOST (Ardhuin et al., 2020) and BFN (Le Guillou
et al., 2020). We also compare with the supervised
neural network 4DVarNet (Fablet et al., 2021), and
with neural networks trained using observations only
such as MUSTI (Archambault. et al., 2023) and the
ConvLTSM introduced by (Martin et al., 2023).
The results summarized in Table 2 show that
our method achieves state-of-the-art performances in
terms of RMSE among methods using only SSH and
methods using SST. More specifically, we see a clear
predominance of neural network-based methods as
well as SST-aware methods. ABED-SSH-SST thanks
to its pre-training and refitting improves the recon-
struction of DUACS by 1.92 cm which acounts for
25% of its RMSE.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
106
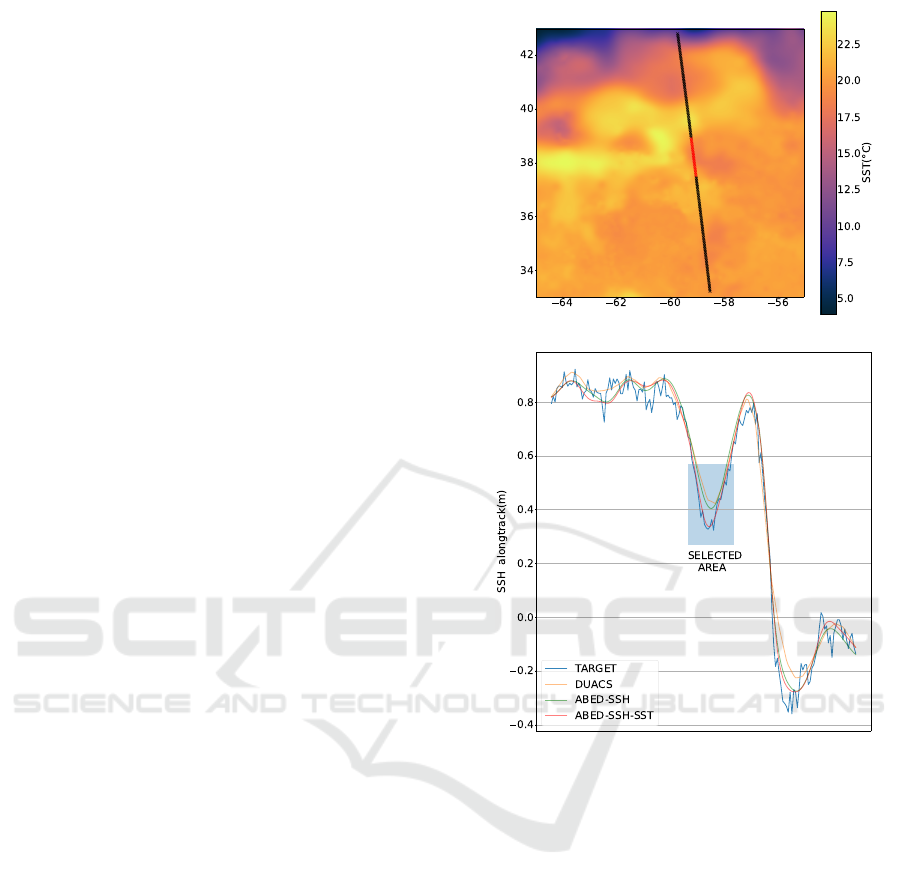
An Example of Improvement Brought by the SST.
Because of the absence of fully gridded ground truth
data in the real-world setup, the interpretation of the
results is difficult. Nonetheless in Figure 4 we present
the estimated maps of the DUACS operational product,
as well as the one of ABED-SSH and ABED-SSH-SST.
We also compute the norm of the spatial gradient of
the SSH to highlight the areas of strong variations. Vi-
sually, we see smaller and more precise eddies in the
ABED inpainting, especially in the SST-aware version.
However, as it is still hard to show the impact of SST
on the reconstruction, we plot in Figure 5 the inter-
polation of the three different maps with the targeted
independent data. We select an area where an im-
provement is brought by the SST, as the SST-agnostic
methods clearly overestimate the SSH. When we plot
the trajectory of the satellite on the SST image we see
that the selected area corresponds to a small drop of
temperature. This is a typical example of the inter-
est in using temperature to constrain the inpainting as
this high-resolution information lacking in input SSH
observations.
5 CONCLUSIONS AND
PERSPECTIVES
5.1 Summary
Throughout this study, we successfully applied a
transfer learning strategy to perform the interpolation
of SSH using SST with an Attention-Based Encoder
Decoder. As in an operational scenario no fully grid-
ded ground truth is accessible to train the neural net-
work, we developed an Observing System Simulation
Experiment, a twin experiment that simulates the ob-
servation system of the satellites. Doing so, we were
able to compute pairs of realistic input/output based
on a physical simulation of the ocean and pre-train
our neural network. Then using an unsupervised loss
function we fine-tuned the neural network on real-
world data. We show that the pre-training enhances
the reconstruction as our method achieves better re-
sults than the same network trained directly from ob-
servations. This is also the case for the fine-tuned
version which outperforms the model solely trained
on simulated data proving the efficiency of the refit-
ting. Benchmarking ABED with standard interpola-
tion methods, either based on physical prior models,
neural networks trained on simulations, or directly
from observations, we show that our training strategy
achieves state-of-the-art performances among SST-
aware or SSH-only methods. Compared to DUACS,
the most widely used oceanography product, we re-
Figure 5: An example of reconstruction improvement
brought by the SST. The SST image is represented along
with the trajectory of the evaluation satellite, as well as the
along-track interpolations of the three estimations presented
in Figure 4.
port an RMSE improvement of 1.92 cm out of the
7.66 cm of error (25% of the RMSE of DUACS) on
noised independent along-track data. We conclude
from this experiment that pre-train and fine-tune neu-
ral networks help the reconstruction of variables, in
settings where no ground truth is available to con-
strain the inversion.
5.2 Discussions and Perspectives
Extension of the Methodology to Other Variables.
The proposed method could be applied to other input
or target variables if the following conditions are ful-
filled. First, the variables must be correlated to each
other, and we must have access to a realistic phys-
ical model that we can use to build a multi-variate
OSSE. The data generated through this mean can then
Pre-Training and Fine-Tuning Attention Based Encoder Decoder Improves Sea Surface Height Multi-Variate Inpainting
107

be used in the pre-training, enabling the network to
accurately learn the physical underlying link. Then
the fine-tuning will adapt this learning to the noise of
the real-world data. One of the most obvious candi-
dates to serve as well as a target or input variable is
the sea’s Chlorophyll, which is a passive tracer of the
oceanic currents (Chelton et al., 2011).
Realism of the OSSE. We show that the multivariate
OSSE performed in this study was realistic, as well
for the SSH noise than for the SST noise. However,
given an appropriate transfer strategy, the networks
trained on the noised version of the SST and networks
trained on the ground truth SST achieve similar re-
sults once retrained. This leads us to reconsider the
necessity of computing a very realistic noise on con-
textual information, as the fine-tuning process will get
rid of the learned features that do not appear in real-
world data.
Toward a Global Gridded Image. The experiment
that we performed in this work was focusing on a sin-
gle geographic area. Training a method able to es-
timate SSH on a global scale would require further
work. For instance, as the physical relationship be-
tween SSH and SST depends on latitude, we are cu-
rious to know if a global model would be competitive
compared to several local models.
REFERENCES
Amores, A., Jord
`
a, G., Arsouze, T., and Le Sommer, J.
(2018). Up to what extent can we characterize ocean
eddies using present-day gridded altimetric products?
Journal of Geophysical Research: Oceans, 123:7220–
7236.
Archambault., T., Filoche., A., Charantonis., A., and
B
´
er
´
eziat., D. (2023). Multimodal unsupervised spatio-
temporal interpolation of satellite ocean altimetry
maps. In Proceedings of the 18th International Joint
Conference on Computer Vision, Imaging and Com-
puter Graphics Theory and Applications (VISIGRAPP
2023) - Volume 4: VISAPP, pages 159–167. IN-
STICC, SciTePress.
Archambault, T., Filoche, A., Charantonis, A., B
´
er
´
eziat, D.,
and Thiria, S. (2023). Unsupervised learning of sea
surface height interpolation from multi-variate simu-
lated satellite observations. Submitted to Journal of
Advances of Modeling Earth Systems (JAMES).
Ardhuin, F., Ubelmann, C., Dibarboure, G., Gaultier, L.,
Ponte, A., Ballarotta, M., and Faug
`
ere, Y. (2020). Re-
constructing ocean surface current combining altime-
try and future spaceborne doppler data. Earth and
Space Science Open Archive.
Ballarotta, M., Ubelmann, C., Rog
´
e, M., Fournier, F.,
Faug
`
ere, Y., Dibarboure, G., Morrow, R., and Picot,
N. (2020). Dynamic mapping of along-track ocean al-
timetry: Performance from real observations. Journal
of Atmospheric and Oceanic Technology, 37:1593–
1601.
Bretherton, F., Davis, R., and Fandry, C. (1976). A tech-
nique for objective analysis and design of oceano-
graphic experiments applied to MODE-73. Deep-Sea
Research and Oceanographic Abstracts, 23:559–582.
Che, H., Niu, D., Zang, Z., Cao, Y., and Chen, X. (2022).
Ed-drap: Encoder–decoder deep residual attention
prediction network for radar echoes. IEEE Geoscience
and Remote Sensing Letters, 19.
Chelton, D. B., Gaube, P., Schlax, M. G., Early, J. J., and
Samelson, R. M. (2011). The influence of nonlinear
mesoscale eddies on near-surface oceanic chlorophyll.
Science, 334:328–332.
CLS/MEOM (2020). Swot data challenge natl60 [dataset].
CLS/MEOM (2021). Data challenge ose -
2021a ssh mapping ose [dataset].
CMEMS (2020). Global ocean physics reanalysis [dataset].
CMEMS (2021). Global ocean along-track l3 sea surface
heights reprocessed (1993-ongoing) tailored for data
assimilation [dataset].
Fablet, R., Amar, M., Febvre, Q., Beauchamp, M., and
Chapron, B. (2021). End-to-end physics-informed
representation learning for satellite ocean remote
sensing data: Applications to satellite altimetry and
sea surface currents. ISPRS Annals of the Photogram-
metry, Remote Sensing and Spatial Information Sci-
ences, 5:295–302.
Fablet, R., Febvre, Q., and Chapron, B. (2023). Multimodal
4dvarnets for the reconstruction of sea surface dynam-
ics from sst-ssh synergies. IEEE Transactions on Geo-
science and Remote Sensing, 61.
Filoche, A., Archambault, T., Charantonis, A., and
B
´
er
´
eziat, D. (2022). Statistics-free interpolation of
ocean observations with deep spatio-temporal prior.
In ECML/PKDD Workshop on Machine Learning for
Earth Observation and Prediction (MACLEAN).
Gaultier, L., Ubelmann, C., and Fu, L. (2016). The chal-
lenge of using future SWOT data for oceanic field
reconstruction. Journal of Atmospheric and Oceanic
Technology, 33:119–126.
Guo, M.-H., Xu, T.-X., Liu, J.-J., Liu, Z.-N., Jiang, P.-T.,
Mu, T.-J., Zhang, S.-H., Martin, R. R., Cheng, M.-M.,
and Hu, S.-M. (2021). Attention mechanisms in com-
puter vision: A survey. Computational Visual Media,
8:331–368.
Hinton, G. and Dean, J. (2015). Distilling the knowledge in
a neural network. In NIPS Deep Learning and Repre-
sentation Learning Workshop.
Jam, J., Kendrick, C., Walker, K., Drouard, V., Hsu, J., and
Yap, M. (2021). A comprehensive review of past and
present image inpainting methods. Computer Vision
and Image Understanding, 203.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Le Guillou, F., Metref, S., Cosme, E., Ubelmann, C., Bal-
larotta, M., Verron, J., and Le Sommer, J. (2020).
Mapping altimetry in the forthcoming SWOT era by
back-and-forth nudging a one-layer quasi-geostrophic
model. Earth and Space Science Open Archive.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
108

Martin, S. (2014). An Introduction to Ocean Remote Sens-
ing. Cambridge University Press, 2 edition.
Martin, S. A., Manucharyan, G. E., and Klein, P. (2023).
Synthesizing sea surface temperature and satellite al-
timetry observations using deep learning improves the
accuracy and resolution of gridded sea surface height
anomalies. Journal of Advances in Modeling Earth
Systems, 15(5):e2022MS003589. e2022MS003589
2022MS003589.
McCann, M., Jin, K., and Unser, M. (2017). Convolutional
neural networks for inverse problems in imaging: A
review. IEEE Signal Processing Magazine, 34:85–95.
Nardelli, B., Cavaliere, D., Charles, E., and Ciani, D.
(2022). Super-resolving ocean dynamics from space
with computer vision algorithms. Remote Sensing,
14:1159.
NASA/JPL (2019). Ghrsst level 4 mur 0.25deg global
foundation sea surface temperature analysis (v4.2)
[dataset].
Qin, Z., Zeng, Q., Zong, Y., and Xu, F. (2021). Image in-
painting based on deep learning: A review. Displays,
69:102028.
Stegner, A., Le Vu, B., Dumas, F., Ghannami, M., Nicolle,
A., Durand, C., and Faugere, Y. (2021). Cyclone-
anticyclone asymmetry of eddy detection on gridded
altimetry product in the mediterranean sea. Journal of
Geophysical Research: Oceans, 126.
Taburet, G., Sanchez-Roman, A., Ballarotta, M., Pujol, M.-
I., Legeais, J.-F., Fournier, F., Faugere, Y., and Dibar-
boure, G. (2019). DUACS DT2018: 25 years of re-
processed sea level altimetry products. Ocean Sci,
15:1207–1224.
Thiria, S., Sorror, C., Archambault, T., Charantonis, A.,
B
´
er
´
eziat, D., Mejia, C., Molines, J.-M., and Crepon,
M. (2023). Downscaling of ocean fields by fusion of
heterogeneous observations using deep learning algo-
rithms. Ocean Modeling.
Ubelmann, C., Cornuelle, B., and Fu, L. (2016). Dynamic
mapping of along-track ocean altimetry: Method and
performance from observing system simulation exper-
iments. Journal of Atmospheric and Oceanic Technol-
ogy, 33:1691–1699.
Ulyanov, D., Vedaldi, A., and Lempitsky, V. (2017). Deep
image prior. International Journal of Computer Vi-
sion, 128:1867–1888.
Woo, S., Park, J., Lee, J.-Y., and Kweon, I. S. (2018). Cbam:
Convolutional block attention module. Computer Vi-
sion and Pattern Recognition.
Yang, J., Gong, P., Fu, R., Zhang, M., Chen, J., Liang, S.,
Xu, B., Shi, J., and Dickinson, R. (2013). The role
of satellite remote sensing in climate change studies.
Nature Climate Change 2013 3:10, 3:875–883.
Pre-Training and Fine-Tuning Attention Based Encoder Decoder Improves Sea Surface Height Multi-Variate Inpainting
109
