
Comparative Study Between Object Detection Models, for Olive Fruit
Fly Identification
Margarida Victoriano
1 a
, Lino Oliveira
1 b
and H
´
elder P. Oliveira
1,2 c
1
INESC TEC, FEUP Campus, Porto, Portugal
2
Faculty of Sciences, University of Porto, Porto, Portugal
Keywords:
Image Processing, Object Detection and Classification, Insect Management.
Abstract:
Climate change is causing the emergence of new pest species and diseases, threatening economies, public
health, and food security. In Europe, olive groves are crucial for producing olive oil and table olives; however,
the presence of the olive fruit fly (Bactrocera Oleae) poses a significant threat, causing crop losses and financial
hardship. Early disease and pest detection methods are crucial for addressing this issue. This work presents
a pioneering comparative performance study between two state-of-the-art object detection models, YOLOv5
and YOLOv8, for the detection of the olive fruit fly from trap images, marking the first-ever application of
these models in this context. The dataset was obtained by merging two existing datasets: the DIRT dataset,
collected in Greece, and the CIMO-IPB dataset, collected in Portugal. To increase its diversity and size, the
dataset was augmented, and then both models were fine-tuned. A set of metrics were calculated, to assess
both models performance. Early detection techniques like these can be incorporated in electronic traps, to
effectively safeguard crops from the adverse impacts caused by climate change, ultimately ensuring food
security and sustainable agriculture.
1 INTRODUCTION
Climate change has considerable effects on the agri-
cultural industry, especially in terms of pests and dis-
eases. It is possible for pests and illnesses to thrive
and spread as temperature and precipitation patterns
change, increasing agricultural damage. Temperature
variations may also affect the behavior and life cycle
of pests, enabling them to spread more quickly and
colonize new areas, increasing the risk of agricultural
damage and making pest management more difficult.
The timing of crop growth and the presence of natu-
ral pest predators can also be impacted by changes in
precipitation and temperature, and this can lead to a
mismatch between crop phenology and insect popula-
tions, which can exacerbate pest damage (Nazir et al.,
2018).
The expected effects of climate change on the dy-
namics of pest and diseases in agriculture underline
the significance of effective pest control strategies that
take these factors into account. In order to reduce
crop losses and use safer control management strate-
a
https://orcid.org/0009-0003-1840-4636
b
https://orcid.org/0000-0003-1036-1072
c
https://orcid.org/0000-0002-6193-8540
gies that safeguard the crop, human health, and the
environment, early pest detection is essential.
Our research focuses on the olive fruit fly (Bac-
trocera oleae), which is a significant threat to olive
trees in the European Union, particularly in Spain and
Italy, which have the largest cultivation areas (Euro-
stat, 2019).
Monitoring the quantity of pests that have been
caught in a trap within a given time frame is one of
the crucial aspects of confirming the occurrence of an
outbreak. Experts typically have to go to the fields
to visually inspect each trap manually to assess in-
festations, which can be a cumbersome and expen-
sive task, especially in large and dispersed orchards
(Shaked et al., 2017; Remboski et al., 2018; Hong
et al., 2020). To address this, new approaches have
been used to more effectively monitor this as well as
other insects, including the installation of electronic
traps supplied with cameras to record images of the
traps that can then be evaluated using classification
and detection models (Uzun et al., 2022; Le et al.,
2021; Diller et al., 2022).
Due to the high percentage of EU cropland de-
voted to olive trees and the recurring outbreaks of
olive fruit flies, monitoring and controlling pests in
458
Victoriano, M., Oliveira, L. and Oliveira, H.
Comparative Study Between Object Detection Models, for Olive Fruit Fly Identification.
DOI: 10.5220/0012361800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
458-465
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

olive orchards is crucial to preserving the health and
productivity of olive trees as well as the quality of
by-products like table olives and olive oil. Early de-
tection of infestations and proactive approach through
control methods, like precise application of pesti-
cides, can reduce the need for more extensive inter-
ventions, assisting in the sustainable development of
olive production while conserving the environment
and human health (Caselli and Petacchi, 2021).
An approach that has been increasingly followed
is to use images collected in real time, from traps
placed on the ground, and computer vision algorithms
to automatically detect the presence of pests.
The purpose of this research is to provide a thor-
ough evaluation of the performance of two state-of-
the-art, fast, and accurate object identification al-
gorithms, YOLOv5 and YOLOv8, in a novel area.
To accomplish this, we fine-tuned the YOLOv5 and
YOLOv8 models using trap images collected from
two locations: Portugal and Greece. These computer
vision models combined with the prediction monitor-
ing process can be used to create a reliable and effec-
tive method for controlling olive fruit fly populations
and protecting olive harvests.
2 RELATED WORK
Object detection is a crucial field in computer vision
that deals with identifying and locating objects in im-
ages or videos. With the advent of deep learning tech-
niques, there has been substantial progress in object
detection in recent years. Insect detection and classi-
fication is a particular domain of object detection that
has significant applications in agriculture, pest con-
trol, and disease prevention. In this section, we will
examine the current state-of-the-art in insect detection
and classification, with a particular emphasis on deep
learning methods.
Deep learning is becoming increasingly signifi-
cant for insect classification and identification due to
its capacity to automatically extract attributes from
raw visual data and learn intricate correlations be-
tween them. For a variety of purposes, including agri-
culture, pest management, and disease prevention, in-
sect classification and identification are essential. Ac-
curate identification and classification of insects can
be accomplished through the use of deep learning,
which can contribute in the creation of efficient man-
agement and control techniques for insect populations
(Bjerge et al., 2022; Diller et al., 2022; Mamdouh and
Khattab, 2021; Tetila et al., 2020).
Diller et al. (Diller et al., 2022) conducted a study
to train deep learning algorithms for the identifica-
tion of three major fruit fly species - Ceratitis cap-
itata, Bactrocera dorsalis, and B. zonata. The al-
gorithm was trained on images collected from lab-
oratory colonies of two species and tested in the
field in five different countries, and on images cap-
tured by an electronic trap built by the authors. The
electronic trap mostly contained only one specimen,
which made it easier to label each image and ap-
ply that label to each insect found in it. To ad-
dress the issue of multiple insect species in field im-
ages, the authors manually labelled each occurrence
by drawing bounding boxes around them using spe-
cific software. Several data augmentation methods
were applied, such as horizontal flipping, vertical flip-
ping, rotations and random brightness and contrast
changes, to enhance the dataset and prevent overfit-
ting. The model was trained using the Faster R-CNN
ResNet50 algorithm and achieved an average preci-
sion of 87.41% to 95.80% for all three target classes.
The model also showed robustness to distinct lighting
conditions and accuracy on clustered samples. The
classification accuracy for all classes in the dataset
collected on the field was 98.29%, and the electronic
trap obtained high precision and accuracy for the three
target species, ranging from 86% to 97%. The pro-
posed model showed good ability to distinguish be-
tween the target classes and non-target classes.
Mamdouh and Khattab (Mamdouh and Khattab,
2021) proposed a framework to detect and count olive
fruit flies in images captured by smart traps in olive
groves. The framework includes preprocessing of
the input dataset by normalizing it with yellow mean
color to unify the background color and make it il-
lumination invariant. The dataset images have vary-
ing lighting settings caused by varying light intensi-
ties and shadows cast by objects, so data augmenta-
tion techniques were applied (flipping, shifting and
rotations) to increase the variability of images, thus
increasing accuracy. To reduce overfitting, the re-
searchers added a Leeds butterfly dataset to the train-
ing data. The researchers used YOLOv4, a single-
stage object detection paradigm, which requires only
one network pass to identify objects. Bounding box
detection is modelled as a regression task, and classes
are modelled as conditional probabilities. With a pre-
trained network, the final layer is fine-tuned based on
the input dataset. The network size was changed to
detect small objects, and the anchor boxes were clus-
tered based on the dataset bounding boxes dimen-
sions by running k-means with nine clusters. The
performance of the proposed framework was evalu-
ated using several metrics, including mean average
precision, precision, recall, and F1-score. The perfor-
mance metrics of the proposed framework were bet-
Comparative Study Between Object Detection Models, for Olive Fruit Fly Identification
459

ter, comparing to the baseline model, although the
training time has greatly increased. The proposed
framework obtained 84% precision, 97% recall, 90%
F1-Score, and 96.68% mAP, while the baseline model
achieved 73% precision, 90% recall, 81% F1-Score,
and 87.59% mAP.
Tetila et al. (Tetila et al., 2020) proposed a frame-
work for classifying and counting insect pests in soy-
bean fields using images captured in the field. The
authors evaluated three deep neural networks trained
with three different strategies: fine-tuning of the net-
work layers with the weights obtained from Ima-
geNet, complete network with the weights initialized
randomly, and transfer learning with the weights ob-
tained from ImageNet. The proposed solution fol-
lows the SLIC Superpixels method to segment the
insects by employing the k-means algorithm to gen-
erate the superpixels that represent the similar re-
gions. Image annotation is performed by specialists
to compose a dataset for training and testing purposes.
The obtained dataset comprises seven insect classes.
A CNN is then trained to extract visual characteris-
tics from superpixels and produce the classification
model to categorize the insect images. In the post-
processing stage, a plantation image is segmented us-
ing the SLIC method, and each segment’s superpixels
are assigned to a certain class. To identify each super-
pixel using the CNN-trained classification model, the
system scans the image from left to right and top to
bottom while parallelly displaying the class’s color.
Thus, by supplying one class per segment, a color-
ful map is produced. The number of insects is de-
termined by adding up the insects from each super-
pixel class that the system has identified. The dataset
was augmented using rotation, scaling, scrolling, and
zooming. For image classification, the authors trained
with Inception-Resnet-v2, ResNet50, and DenseNet-
201. The DenseNet-201 obtained the best accuracy,
94.89%, followed by Resnet-50 with 93.78% and then
Inception-Resnet-v2 with 93.40%.
Bjerge et al. (Bjerge et al., 2022) developed a real-
time insect detection and classification algorithm us-
ing YOLOv3 deep learning model. The study aimed
to identify eight different insect species by exploring
various combinations of network parameters, such as
image size, kernel size, and number of training itera-
tions, to obtain the best model performance. The au-
thors acquired a dataset of 5757 images containing
insects and 2121 background images without insects
from Sedum plants and Calluna vulgaris plants in
Denmark, which were manually labelled with bound-
ing boxes surrounding the insects. The dataset was
augmented using default settings of the algorithm to
increase the size of the training dataset. The authors
evaluated the performance of the model using several
metrics, including precision and recall, during train-
ing and testing phases. The average training preci-
sion was 95%, and the average training recall was
91%. For testing, the average precision and recall
were 72% and 73%, respectively, and the mean av-
erage precision (mAP) was 87%. Overall, the study
demonstrated the ability of YOLOv3 to accurately de-
tect and classify different insect species in real-time.
In summary, while the reviewed studies demon-
strate the potential of deep learning algorithms for
insect classification and detection, there are still op-
portunities for further improvement in terms of data
augmentation, labelling, pre-training techniques and
the use of different networks, namely YOLOv5 and
YOLOv8, especially for the detection of the olive fruit
fly, due to the lack of comprehensive studies on this
particular insect.
3 PROPOSED METHODOLOGY
Our study introduces a comparison between two mod-
els that can identify the olive fruit fly, also known as
Bactrocera oleae, a pest that has a significant negative
impact on the olive oil industry. We used YOLOv5
(Jocher, 2020) and YOLOv8 (Jocher et al., 2023) ar-
chitectures for this purpose, due to their high accu-
racy shown on several object detection benchmarks,
fast inference and flexibility. Our framework involves
multiple steps, including dataset preparation, applica-
tion of data augmentation techniques to mimic real-
world scenarios, and training with both models on a
cross-cohort dataset of olive fruit fly trap images. To
assess the performance of both models, we used three-
fold cross-validation with hyperparameter tuning.
3.1 Dataset Description
The CIMO-IPB dataset (Pereira, 2023) contains 321
pictures, collected in Portuguese olive groves, mostly
exhibiting olive fruit flies, trapped in yellow sticky
traps. Experts annotated each image in the dataset
with spatial identification of the olive fruit fly using
the labelImg tool (Tzutalin, 2015). The insects in the
images were manually outlined using bounding boxes
and labelled, as shown in Figure 1.
The DIRT dataset (Kalamatianos et al., 2018)
comprises 848 pictures, predominantly exhibiting
olive fruit flies trapped in McPhail traps from 2015
to 2017 at different sites in Corfu, Greece. While the
majority of the images were procured via the e-Olive
mobile application, allowing users to upload captures
and photographs, they were obtained using a range of
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
460

Figure 1: CIMO-IPB Dataset Image Sample with Annota-
tions (Pereira, 2023).
gadgets like smartphones, tablets, and cameras, which
makes the dataset non-standardized. Each image in
the dataset contains spatial identification of the olive
fruit fly, annotated by experts, using the labelImg tool,
where the insects in the images were outlined manu-
ally using bounding boxes and tagged. Figure 2 shows
an annotated image retrieved from the DIRT dataset.
Figure 2: DIRT Dataset Image Sample with Annotations
(Kalamatianos et al., 2018).
Both datasets contain other insects, but those in-
stances will be considered as background.
We merged both image datasets, in order to add
more variability to the data. By combining these two
datasets, we were able to create a more comprehen-
sive and more diverse dataset that included images
of the same insect species but with different back-
grounds, lighting conditions, and poses, allowing the
model to generalize better to new, unseen data.
3.2 Data Preprocessing
In order to use the labels with the YOLOv5 and
YOLOv8 object detection model, the labels first had
to be transformed from the PASCAL VOC XML for-
mat to the YOLO format. The annotations in the
YOLO format are described by a text file, for each
image, where each line represents an object. Each ob-
ject is described with an identifier, followed by the
x-coordinate and the y-coordinate of the center of the
bounding box, and the width and height of the bound-
ing box. We followed a common practice of dividing
the dataset into training, validation, and testing sets,
where 80% was assigned for training, 10% for valida-
tion, and 10% for testing. This enabled us to employ
most of the data for model training while holding back
a section to evaluate its performance. Furthermore, to
enhance the model’s precision and robustness, we im-
plemented three-fold cross-validation, on the training
set, in addition to the split.
3.3 Data Augmentation Techniques
Performing object detection on trap images captured
outdoors may pose some challenges that may under-
mine the model’s accuracy and robustness. Some
of these difficulties, for instance, include variations
in lighting, weather conditions, and the presence of
blurry or low-quality images. To overcome this, data
augmentation is a crucial stage in the process of train-
ing models. The goal is to increase the variety and
volume of data that is available, which will boost
the model’s precision, resilience, and generalizabil-
ity. Figure 3 shows the data augmentation techniques
that were applied to the dataset.
We applied horizontal (Figure 3b) and vertical
flips (Figure 3c), which is an efficient way to create
mirrored versions of the original images. This in-
creases the quantity of training data that is available
and enables the model to learn to detect objects from
a variety of orientations.
We also applied blurring (Figure 3d), which repli-
cates fluctuations in focus and camera movement that
may come from external factors. Similarly, random
brightness modification (Figure 3g) can aid in simu-
lating changes in lighting circumstances, which can
be influenced by weather or sun position. We also ap-
plied multiplicative noise (Figure 3e and Figure 3f),
which adds noise to the images to help the model
learn to recognize insects under noisy conditions.
By using JPEG compression (Figure 3h), we com-
pressed the images to enable the model to learn to rec-
ognize insects under low-resolution conditions. This
is particularly useful in the context of capturing pic-
tures in the field, where images need to be compressed
to reduce their size for transmission or storage, lead-
ing to poorer image quality.
3.4 YOLOv5 Architecture
YOLO (You Only Look once) (Redmon et al., 2016)
is a real-time object detection algorithm. YOLOv5
(Jocher, 2020) is the fifth version of the YOLO algo-
rithm and is designed to be faster, more accurate, and
easier to use than its predecessors.
YOLOv5 is a single-stage object detector and is
composed of three main components: the backbone,
Comparative Study Between Object Detection Models, for Olive Fruit Fly Identification
461
(a) Original image. (b) Horizontal Flip. (c) Vertical Flip. (d) Blurr.
(e) Multiplicative Noise. (f) Multiplicative Noise
with varying factor.
(g) Random Brightness
Contrast.
(h) JPEG Compression.
Figure 3: Data augmentation techniques applied to the olive fruit fly image dataset. This helped to improve the performance
of the models to detect olive fruit flies in different orientations and in different conditions.
the neck and the head.
Yolov5 combined the cross stage partial network
(CSPNet) (Wang et al., 2019) with Darknet to create
CSPDarknet, which operated as the network’s back-
bone. By including gradient changes into the fea-
ture map, this integration decreases the parameters
and FLOPS of the model and addresses the issue of
redundant gradient information in large-scale back-
bones. This not only guarantees quicker and more
precise inference, but also minimizes the dimension
of the whole model.
In order to improve information flow, Yolov5 ad-
ditionally uses the path aggregation network (PANet)
(Wang et al., 2020) as its neck. The dissemination
of low-level features is enhanced by PANet’s novel
feature pyramid network (FPN) structure, which
strengthens the bottom-up path. Moreover, adaptive
feature pooling is used to link feature grids and all fea-
ture levels, enabling helpful information at each level
to spread immediately to the next subnetwork.
The model uses SPPF, which is a variant of Spatial
Pyramid Pooling (SPP) (He et al., 2014) that com-
bines data from inputs and produces a fixed-length
output, without slowing down the network. The most
important context features are separated, and the re-
ceptive field is greatly expanded.
Yolov5’s head (Redmon and Farhadi, 2018) also
produces feature maps in three distinct sizes to pro-
vide multi-scale prediction and aid in the detection of
small, medium, and large objects. It predicts the ob-
ject bounding boxes, the scores and the object classes.
YOLOv5 architecture overview is described in
Figure 4.
Figure 4: YOLOv5 Architecture.
3.5 YOLOv8 Architecture
YOLOv8 (Jocher et al., 2023) is the successor of the
YOLOv5 algorithm and presents an integrated frame-
work for training models for object detection, in-
stance segmentation and image classification.
YOLOv8 introduces a new backbone, Darknet-53,
that is faster and more accurate than previous ver-
sions. The effectiveness of this version is due to the
use of a larger feature map and a more effective con-
volutional network, which leads to faster and more ac-
curate object detection. The model’s capacity to iden-
tify patterns and objects in the data is improved by the
larger feature map’s ability to support more complex
feature interactions. It also helps to lessen overfitting
and model training time.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
462

Moreover, YOLOv8 makes use of feature pyramid
networks, which boosts overall accuracy by better
identifying objects of various sizes. Feature Pyramid
networks use different feature map scales in conjunc-
tion with skip connections to more accurately predict
larger and smaller objects, analogous to making pre-
dictions on different image sizes.
Unlike the YOLOv5, the YOLOv8 introduced an
anchor-free detection head. It does not use anchor
boxes to predict the offset from a predefined anchor
box. Instead, it directly predicts the object’s center in
an image.
Figure 5 illustrates YOLOv8 architecture.
Figure 5: YOLOv8 Architecture.
3.6 Training and Testing
We conducted three-fold cross-validation with hyper-
parameter tuning on the YOLOv5 and YOLOv8 mod-
els using previously split training data. This allowed
us to assess the performance of both models on differ-
ent subsets of the data and optimize the hyperparam-
eters.
The hyperparameters we experimented with are
summarized on the Table 1.
Table 1: Range of hyperparameters varied during experi-
mentation.
Hyperparameter Range
Number of Epochs 50 - 200
Batch Size 8 - 20
Learning Rate 0.0001 - 0.1
Weight Decay 0.0005 - 0.001
Optimizers SGD and Adam
4 RESULTS EVALUATION
Precision, recall, and mean average precision were
used to evaluate the models’ performance after cross-
validation.
We retrained both models using the best perform-
ing hyperparameters, obtained with cross-validation,
as shown in Table 2.
Table 2: Best performing hyperparameters in YOLOv5 and
YOLOv8.
Model Number of Epochs Batch Size Learning Rate Weight Decay Optimizer
YOLOv5 150 8 0.01 0.0005 SGD
YOLOv8 90 8 0.01 0.0005 SGD
Finally, we tested the retrained models on the 10%
previously split set.
The test results show that YOLOv5 and YOLOv8
perform similarly under identical training conditions.
YOLOv5 achieved a precision of 0.8, recall of 0.75,
and mAP of 0.82 at an IoU threshold of 0.5 dur-
ing cross-validation. After retraining, its precision
slightly dropped to 0.76, while recall and mAP re-
mained constant.
On the other hand, YOLOv8, during cross-
validation, attained a precision of 0.75, recall of 0.73,
and mAP of 0.79. After retraining, its precision im-
proved to 0.79, with recall staying at 0.74 and mAP
increasing to 0.82.
In summary, both models performed well in in-
sect detection tasks. YOLOv5 demonstrated higher
precision during cross-validation, whereas YOLOv8
showed significant improvement in precision and
mAP after retraining. Notably, YOLOv8 trained
faster than YOLOv5, which is crucial for efficient re-
source utilization in object detection tasks.
Table 3 shows the comparison between the ob-
tained results.
Table 3: Results comparison between YOLOv5 and
YOLOv8.
Metric
3-fold Cross Validation Testing with Best Parameters
YOLOv5 YOLOv8 YOLOv5 YOLOv8
Precision 0.80 0.75 0.76 0.79
Recall 0.75 0.73 0.75 0.74
mAP@.5 0.82 0.79 0.82 0.82
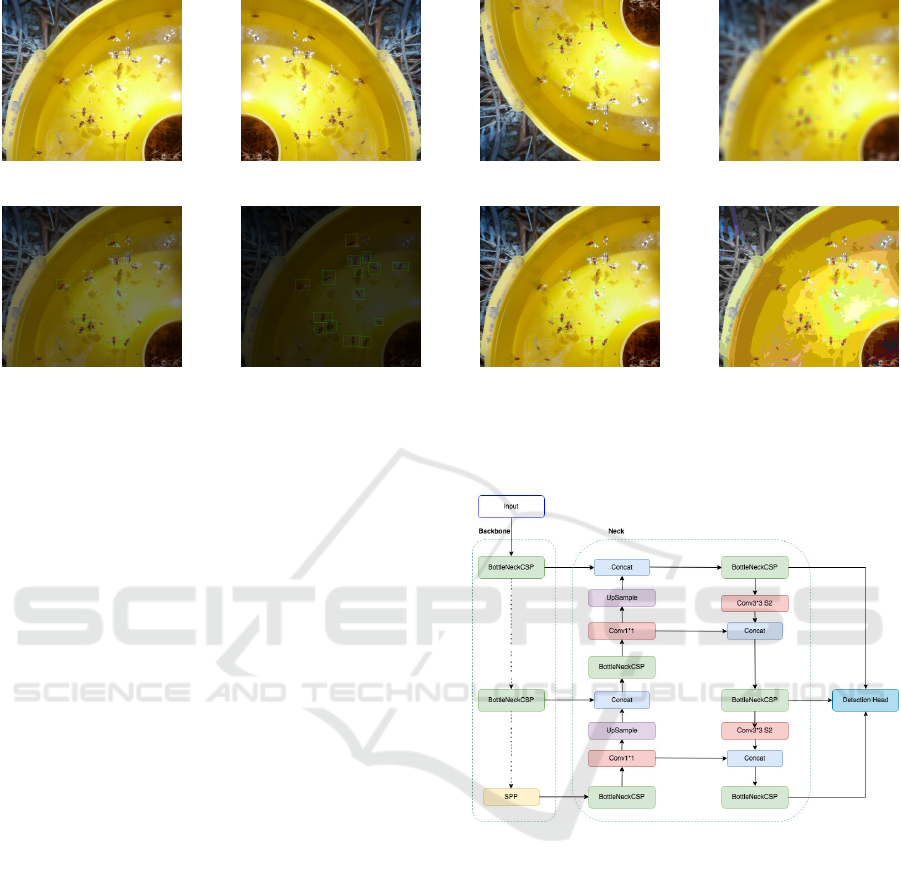
Figure 6 shows the detection results obtained us-
ing YOLOv5 and YOLOv8 models, respectively, on
samples from both datasets. On the DIRT dataset,
both models detected correctly the olive fruit fly in-
stances; however, YOLOv5 predictions had higher
confidence values (Figure 6a), in comparison to
YOLOv8 confidence values (Figure 6c). On the other
hand, on the CIMO-IPB dataset, both models per-
formed similarly in terms of the detection confidence
values, as seen in Figure 6b and Figure 6d. The
Comparative Study Between Object Detection Models, for Olive Fruit Fly Identification
463

(a) Detection results on
DIRT dataset sample us-
ing YOLOv5.
(b) Detection results on
CIMO-IPB dataset sam-
ple using YOLOv5.
(c) Detection results on
DIRT dataset sample us-
ing YOLOv8.
(d) Detection results on
CIMO-IPB dataset sam-
ple using YOLOv8.
Figure 6: Detection results using YOLOv5 and YOLOv8.
CIMO-IPB dataset posed a set of challenges. Many
images were marred by shadows, cast by natural el-
ements or artificial structures (like the phone shadow
in Figure 6b), which can obscure crucial details. Ad-
ditionally, intense sunlight created areas of overex-
posure, making it difficult to discern finer features.
Furthermore, a lack of precise focus in some images
compounded the complexity of the dataset. Despite
the lower scores on these images, the models were
still able to correctly predict the target class. This is a
positive result, as it indicates that the models are ro-
bust to real-world challenges such as shadows, intense
sun, and lack of focus. In real-world applications, it is
important to have models that can still perform well
even when faced with these challenges.
In the literature review, it is noted that a method
proposed by (Mamdouh and Khattab, 2021) employ-
ing the DIRT dataset yielded superior results com-
pared to our own approach. While both methodolo-
gies share the foundation of the DIRT dataset, a crit-
ical distinction arises from the integration of an ad-
ditional dataset, the CIMO-IPB dataset, in our work.
The CIMO-IPB dataset encompasses images of the
same target object, the olive fruit fly, yet the con-
ditions and settings of capture significantly diverge
from those in the DIRT dataset. CIMO-IPB dataset
comprises images of the same target object, albeit
captured under vastly different conditions and set-
tings. This strategic integration aims to enhance the
robustness and generalizability of our model, a fac-
tor not accounted for in the comparison. The rea-
soning behind combining the CIMO-IPB dataset and
the DIRT dataset was to increase the diversity and
robustness of our model. By combining images col-
lected under different situations, our method develops
a more comprehensive grasp of the olive fruit fly’s de-
piction. In comparison to the method that only uses
the DIRT dataset, our mixed dataset approach has sig-
nificant advantages in terms of improved generaliz-
ability and adaptability across varied settings. The
suggested approach by Mamdouh and Khattab (Mam-
douh and Khattab, 2021) achieve a slightly higher
precision than our method, 84% versus 79%, while
it surpasses it on the other metrics, due to the specific
characteristics of the DIRT dataset.
In summary, the alternative technique that focuses
entirely on the DIRT dataset produces great results,
particularly in terms of recall and mAP. This is most
likely owing to the dataset’s narrow focus. Our tech-
nique, on the other hand, which mixes two datasets
with differing conditions, maintains competitive per-
formance across all criteria. This shows that it has
the ability to perform well in a variety of real-world
circumstances. The decision to mix the DIRT dataset
and the CIMO-IPB dataset exemplifies an intentional
effort to improve the model’s adaptability and versa-
tility, as evidenced by the acceptable results obtained.
During our research, we noticed that there is a lack
of publicly available datasets containing the olive fruit
fly. Due to the limited availability of datasets for our
target species, we explored related studies on differ-
ent insects, to potentially adapt methodologies from
these works. Comparing the results between studies
is not significant, due to their different morphologies
and features. Our work was impacted by the lack
of comprehensive datasets, but our tailored approach
was shown to be effective for the detection of the olive
fruit fly.
5 CONCLUSION AND FUTURE
WORK
To summarize, the purpose of this study was to assess
two alternative approaches for identifying and catego-
rizing olive fruit flies, which pose a significant risk to
olive cultivation in the European Union. The method-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
464

ology consisted of augmenting the dataset and fine-
tuning YOLOv5 and YOLOv8 models using the aug-
mented data. The experimental results showed that
both models effectively detected the olive fruit fly,
but YOLOv8 obtained superior results, in terms of the
evaluation metrics.
In the future, the fine-tuned models, which include
domain knowledge to help improve the methodolo-
gies, are going to be integrated on a web-based infor-
mation and management system, which will receive
the images collected from the field, by a robotic smart
trap developed by our team, and return the image
with the detection results, to aid farmers in making
informed decisions.
ACKNOWLEDGEMENTS
This work is co-financed by Component 5 - Capital-
ization and Business Innovation of core funding for
Technology and Innovation Centres (CTI), integrated
in the Resilience Dimension of the Recovery and Re-
silience Plan within the scope of the Recovery and
Resilience Mechanism (MRR) of the European Union
(EU), framed in the Next Generation EU, for the pe-
riod 2021 - 2026
REFERENCES
Bjerge, K., Mann, H. M., and Høye, T. T. (2022). Real-time
insect tracking and monitoring with computer vision
and deep learning. Remote Sensing in Ecology and
Conservation, 8:315–327.
Caselli, A. and Petacchi, R. (2021). Climate change and
major pests of mediterranean olive orchards: Are we
ready to face the global heating? Insects, 12(9).
Diller, Y., Shamsian, A., Shaked, B., Altman, Y., Danziger,
B. C., Manrakhan, A., Serfontein, L., Bali, E., Wer-
nicke, M., Egartner, A., Colacci, M., Sciarretta, A.,
Chechik, G., Alchanatis, V., Papadopoulos, N. T., and
Nestel, D. (2022). A real-time remote surveillance
system for fruit flies of economic importance: sen-
sitivity and image analysis. Journal of Pest Science,
1:1–12.
Eurostat, E. (2019). Statistics explained. (Accessed on
2/02/2023).
He, K., Zhang, X., Ren, S., and Sun, J. (2014). Spatial
pyramid pooling in deep convolutional networks for
visual recognition. In Fleet, D., Pajdla, T., Schiele, B.,
and Tuytelaars, T., editors, Computer Vision – ECCV
2014, pages 346–361, Cham. Springer International
Publishing.
Hong, S.-J., Kim, S.-Y., Kim, E., Lee, C.-H., Lee, J.-S.,
Lee, D.-S., Bang, J., and Kim, G. (2020). Moth detec-
tion from pheromone trap images using deep learning
object detectors. Agriculture, 10(5):170.
Jocher, G. (2020). YOLOv5 by ultralytics. Version 7.0.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). YOLO by
Ultralytics.
Kalamatianos, R., Karydis, I., Doukakis, D., and Avlonitis,
M. (2018). Dirt: The dacus image recognition toolkit.
Journal of Imaging 2018, Vol. 4, Page 129, 4:129.
Le, A. D., Pham, D. A., Pham, D. T., and Vo, H. B. (2021).
Alerttrap: A study on object detection in remote in-
sects trap monitoring system using on-the-edge deep
learning platform.
Mamdouh, N. and Khattab, A. (2021). Yolo-based deep
learning framework for olive fruit fly detection and
counting. IEEE Access, 9.
Nazir, N., Bilal, S., Bhat, K., Shah, T., Badri, Z., Bhat,
F., Wani, T., Mugal, M., Parveen, S., and Dorjey, S.
(2018). Effect of climate change on plant diseases. In-
ternational Journal of Current Microbiology and Ap-
plied Sciences, 7:250–256.
Pereira, J. A. (2023). Yellow sticky traps dataset
olive fly
(Bactrocera Oleae).
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement.
Remboski, T. B., de Souza, W. D., de Aguiar, M. S., and
Ferreira, P. R. (2018). Identification of fruit fly in in-
telligent traps using techniques of digital image pro-
cessing and machine learning. In Proceedings of the
33rd Annual ACM Symposium on Applied Computing,
SAC ’18, page 260–267, New York, NY, USA. Asso-
ciation for Computing Machinery.
Shaked, B., Amore, A., Ioannou, C., Vald
´
es, F., Alorda,
B., Papanastasiou, S., Goldshtein, E., Shenderey, C.,
Leza, M., Pontikakos, C., and et al. (2017). Electronic
traps for detection and population monitoring of adult
fruit flies (diptera: Tephritidae). Journal of Applied
Entomology, 142(1-2):43–51.
Tetila, E. C., MacHado, B. B., Menezes, G. V., Belete, N.
A. D. S., Astolfi, G., and Pistori, H. (2020). A deep-
learning approach for automatic counting of soybean
insect pests. IEEE Geoscience and Remote Sensing
Letters, 17:1837–1841.
Tzutalin (2015). Labelimg.
Uzun, Y., Tolun, M. R., Eyyuboglu, H. T., and Sari, F.
(2022). An intelligent system for detecting mediter-
ranean fruit fly [medfly; ceratitis capitata (wiede-
mann)]. Journal of Agricultural Engineering, 53.
Wang, C.-Y., Liao, H.-Y. M., Yeh, I.-H., Wu, Y.-H., Chen,
P.-Y., and Hsieh, J.-W. (2019). Cspnet: A new back-
bone that can enhance learning capability of cnn.
Wang, K., Liew, J. H., Zou, Y., Zhou, D., and Feng, J.
(2020). Panet: Few-shot image semantic segmenta-
tion with prototype alignment.
Comparative Study Between Object Detection Models, for Olive Fruit Fly Identification
465
