
Semantic State Estimation in Robot Cloth Manipulations
Using Domain Adaptation from Human Demonstrations
∗
Georgies Tzelepis
1
, Eren Erdal Aksoy
2
, J
´
ulia Borr
`
as
1
and Guillem Aleny
`
a
1
1
Institut de Rob
`
otica i Inform
`
atica Industrial, CSIC-UPC, Llorens i Artigas 4-6, 08028 Barcelona, Spain
2
Halmstad University, Center for Applied Intelligent Systems Research, Halmstad, Sweden
Keywords:
Robotic Perception, Garment Manipulation, Semantics, Cloth, Transfer Learning, Domain Adaptation.
Abstract:
Deformable object manipulations, such as those involving textiles, present a significant challenge due to their
high dimensionality and complexity. In this paper, we propose a solution for estimating semantic states in
cloth manipulation tasks. To this end, we introduce a new, large-scale, fully-annotated RGB image dataset of
semantic states featuring a diverse range of human demonstrations of various complex cloth manipulations.
This effectively transforms the problem of action recognition into a classification task. We then evaluate
the generalizability of our approach by employing domain adaptation techniques to transfer knowledge from
human demonstrations to two distinct robotic platforms: Kinova and UR robots. Additionally, we further
improve performance by utilizing a semantic state graph learned from human manipulation data.
1 INTRODUCTION
While rigid object manipulation has achieved matu-
rity, cloth manipulation remains in its infancy due to
its high complexity. Recent results mainly focused on
cloth state estimation, grasp point selection, and effi-
cient representations (Hoque et al., 2020; Lippi et al.,
2020; Pumarola et al., 2018; Corona et al., 2018; Qian
et al., 2020), but the high-level understanding of the
cloth deformation state is still an uncharted challenge.
Unlike their rigid and articulated counterparts, where
the number of possible states for an object is man-
ageable and can be semantically defined and linked to
actions, identifying semantic deformation states of a
textile object is a high dimensional problem that has
so far been unexplored, to the best of our knowledge.
One of the core challenges in cloth manipulation
is the difficulty of obtaining reliable labeled data, hin-
dering the training of AI systems. This becomes
even more challenging due to substantial performance
drops of such AI systems when switching from one
∗
This work receives funding from the Spanish
State Research Agency through the project CHLOE-
GRAPH (PID2020-118649RB-l00); by MCIN/ AEI
/10.13039/501100011033 and by the ”European Union
(EU) NextGenerationEU/PRTR under the project CO-
HERENT (PCI2020-120718-2); and the EU H2020 Pro-
gramme under grant agreement ERC–2016–ADG–741930
(CLOTHILDE).
domain (e.g., from humans) to another one involv-
ing, for instance, robots with different embodiments
running in new scenes. We tackle this challenge by
extracting semantic cloth states and employing them
to reduce the shift between different domains. Our
method for semantic state estimation also requires la-
beled data, but we show how we can apply our net-
work trained with labeled human demonstrations to
different robotic domains using domain shift adapta-
tion techniques, without requiring additional labeled
data (See Fig. 1). This opens the door to learning from
human demonstrations and automatic data segmenta-
tion, allowing the application of tailored techniques
for each semantic state.
In the past, cloth state estimation has usually been
focused on estimating the corresponding mesh (Li
et al., 2018; Pumarola et al., 2018) or interesting
grasping points (Seita et al., 2018; Corona et al.,
2018). Instead, in this work, we utilize a high-
level semantic description of the cloth state, following
a framework introduced in (Garcia-Camacho et al.,
2022), that includes not only semantic information
on the cloth deformation types (e.g. crumpled, flat,
folded) but also the tags representing where the cloth
is grasped from (e.g. right/left corners, edge, etc.) and
what contacts the cloth has with the environment.
Unlike techniques such as edge tracking (Schul-
man et al., 2013; Kumar et al., 2018), trajectory trac-
ing (Lee et al., 2022) or reconstruction (Chi and Song,
172
Tzelepis, G., Aksoy, E., Borràs, J. and Alenyà, G.
Semantic State Estimation in Robot Cloth Manipulations Using Domain Adaptation from Human Demonstrations.
DOI: 10.5220/0012368200003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
172-182
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Figure 1: First, we train on fully labeled data from hu-
man demonstration, from which we also learn an adjacency
graph. In the second step, we regularize the latent space
with time contrastive learning in all domains and then per-
form domain adaptation separately on each robot domain.
When doing inference, accuracy is improved by performing
a post-process on the predictions using the learned graph.
2021; Bednarik et al., 2018; Bednarik et al., 2020)
which incorporate low-level features and time coher-
ence that are difficult to extract to estimate the gar-
ment deformation from some target poses in a single
frame, the high-level information provided by the se-
mantic states make them ideal for monitoring, data
segmentation, and decision-making. Our framework
learns to recognize both the garment deformation and
its grasping state. Thus, it acts as a link between the
low and high-level features.
Our framework’s central purpose is knowledge
transfer from human demonstrations. Deforming ob-
jects through human demonstration facilitates quicker
actions with more dynamic garment interactions
where robotic data collection poses challenges due
to control, grasping feasibility, and manipulation
speed complexities. Additionally, static environments
arise from limited robot mobility. Demonstration-to-
sample ratios underscore these claims: human data
(33.6K RGB images, 264 demos), UR (15.5K RGB
images, 20 demos), Kinova (32.7K RGB images, 20
demos).
Our contributions (summarized in Fig. 1) include:
• A solution for the semantic state estimation prob-
lem in cloth manipulation tasks, evaluating dif-
ferent state-of-the-art network models. Applica-
tion of time contrastive learning (Sermanet et al.,
2018) and domain adaptation (Ganin and Lempit-
sky, 2015) to generalize from human demonstra-
tion to two different robotic domains, without re-
quiring additional labeled data.
• Learning a graph of semantic state adjacencies
from our labeled data, to be further used to im-
prove the accuracy of the domain adaptation in-
ferences.
• A novel, fully-annotated dataset for uni- and bi-
manual cloth manipulation including human and
robotic manipulations.
Our experimental findings show our semantic
state estimation model trained with human demon-
strations can recognize states in completely different
robotic domains, using Kinova robotic arms and Uni-
versal Robot arms, without requiring additional la-
beled data. We will release our full dataset and code
to encourage further research on the subject.
2 RELATED WORK
Our work is inspired by the abstract semantic repre-
sentations of manipulation states done for rigid ob-
jects, based on contact interactions between the ob-
ject, the hands, and the environment (W
¨
org
¨
otter et al.,
2013), which was applied to manipulation recogni-
tion, segmentation (Aksoy et al., 2011) and robot ex-
ecution tasks (Aein et al., 2019).
Recognition of semantic tags in cloth manipula-
tion mainly consisted of identifying garment or fab-
ric types. In (Mariolis et al., 2015), CNNs were
used to first recognize the garment type and its pose.
In (Kampouris et al., 2016), attributes like garment or
fabric type were identified using multisensorial data.
In (Ramisa et al., 2013), the cloth category could be
identified using a descriptor from RGB-D data. How-
ever, these semantic tags differ from our work because
they are not related to the manipulation state. The
work in (Verleysen et al., 2022) could monitor the task
progression in human folding tasks using time con-
trastive learning, where task progress steps are similar
to semantic states. However, this approach has limita-
tions when applied to tasks where the same semantic
state repeats in different time frames. To the best of
our knowledge, no other semantic state identification
has been applied to cloth manipulation.
Research on the perception of textiles has also
focused on other aspects than semantic state esti-
mation. For instance, to detect task-oriented grasp-
ing points (Ramisa et al., 2016), to identify cor-
ners in RGB-D images (Seita et al., 2018), or to do
semantic area segmentation to identify corners and
edges from a cloth (Qian et al., 2020) or to esti-
mate the mesh (Pumarola et al., 2018). Others use
directly the RGB-D image as the state definition for
image-based learning approaches (Hoque et al., 2020;
Seita et al., 2018; Jangir et al., 2020; Lippi et al.,
2020), sometimes by adding state parameters on grip-
per states (Matas et al., 2018) or on robotic arm
joints (Yang et al., 2016). While all these methods
extract visual information through a neural network,
Semantic State Estimation in Robot Cloth Manipulations Using Domain Adaptation from Human Demonstrations
173
they either focus on static garments or learn control
policies for reinforcement learning.
In the context of the robotic manipulation of tex-
tiles, several datasets have been released. Human
demonstrations of folding tasks have been recorded
with the corresponding skeletal labels of the per-
son performing the manipulations (Verleysen et al.,
2020). Other datasets include one for tracking
clothes (Schulman et al., 2013), for reconstruction
purposes (Bednarik et al., 2018), or to identify rele-
vant parts of deformables, with labels obtained from
UltraViolet light (Thananjeyan et al., 2022). Ex-
cept (Verleysen et al., 2020), these datasets have a
limited spectrum of actions because they omitted the
gripper interactions. They either focus only on one
single domain or are very problem-specific, such as
the detection of grasping points. Our approach, how-
ever, derives the high-level semantic scene represen-
tation that can be used to link multiple domains, e.g.,
human and robotic.
Domain adaptation has also been an active area of
research since the emerged popularity and success of
deep learning. One of the most popular approaches
to unsupervised domain adaptation is Domain Adver-
sarial Neural Networks (DANN) (Ganin and Lempit-
sky, 2015), which uses a classifier and a discrimi-
nator to align the feature representation between the
source and target domains. Domain Separation Net-
works (DSN) (Bousmalis et al., 2016) employed do-
main confusion loss to encourage the model to learn
domain-invariant features. Adversarial Discrimina-
tive Domain Adaptation (ADDA) (Tzeng et al., 2017)
further extended DANN by incorporating adversarial
learning to learn domain-invariant features. Condi-
tional Domain Adaptation Network (CDAN) (Long
et al., 2018) employed a conditioned multilinear map
to fully capture cross-variance between the feature
representation and classifier prediction, resulting in
a better alignment of the joint distributions. Finally,
Batch Spectral Penalization (BSP) (Chen et al., 2019)
penalizes the largest singular values to enhance the
feature discriminability of the lower-rank representa-
tions.
Time contrastive learning (Sermanet et al., 2018)
focuses on capturing temporal relationships and de-
pendencies within sequential data and thus regulariz-
ing the latent space.
3 METHOD
Inspired by the work in (Garcia-Camacho et al., 2022)
in which complex garment manipulations were bro-
ken down into semantic states by observing humans,
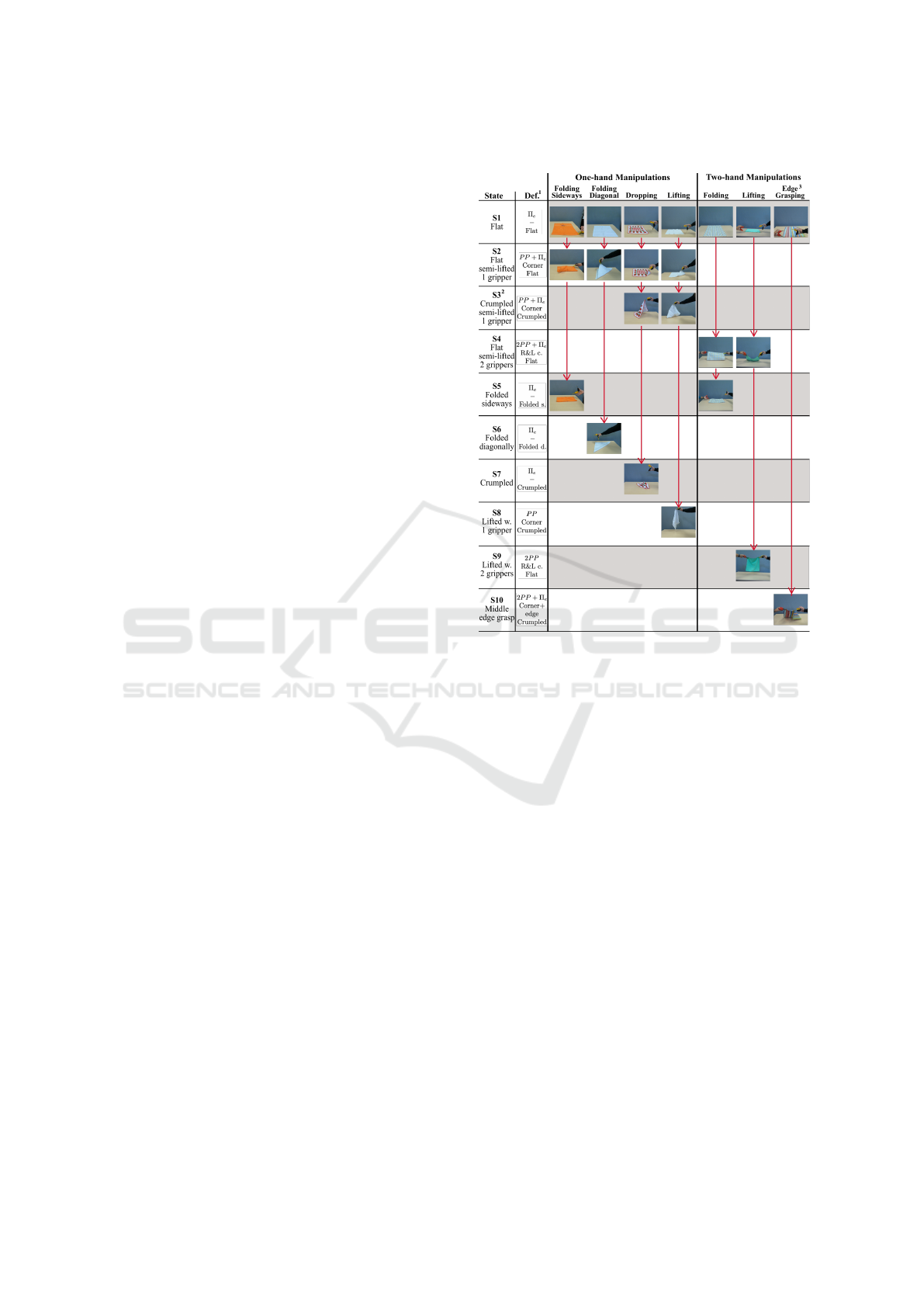
Table 1: Cloth manipulation tasks and semantic states.
1: For each state, we define the grasp type, the location of
the grasps and the semantic description of deformation.
Following (Borr
`
as et al., 2020), PP: pinch grasp, 2PP:
bi-manual pinch, and Π
e
: the extrinsic contact with the
table.
2: By crumpled we mean the cloth is deformed enough so
that it cannot go back to a flat configuration without
additional manipulation, as opposed to flat in the S2 state,
which can be reversed to its previous state.
3: This manipulation is repeated at different distances from
the corner grasp, always on the same edge.
our research focuses on cloth manipulations, primar-
ily through human demonstrations that utilize a pair
of two-point grippers, and later through robotic ma-
nipulations executed in new scene contexts using dif-
ferent platforms. Towels and kitchen towels are in-
cluded in both human and robotic experiments since
they share the same topology. To facilitate the evalua-
tion we introduce two restrictions in our experiments:
one refers to the cloth size which should fit the edges
of the table, while the other is the initial position,
which is either flat on the table or is lifted in the air
by two grippers (see Fig. 1 and Table 1).
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
174
3.1 Cloth Manipulation Tasks and
Semantic States
In our framework, seven different uni- and bi-manual
cloth manipulation tasks such as folding diagonally
and lifting with two grippers are performed on eigh-
teen different clothes. Since not all clothes are square-
shaped, we consider the manipulations that involve
diagonally folding only with clothes that are square.
Table 1 shows the seven manipulations considered
(one in each column). Ten semantic states are re-
quired in total (rows), each of which defines a unique
deformation type of the cloth. They are defined by
the corresponding grasp type, location of grasp in the
cloth, and deformation category (Borr
`
as et al., 2020;
Garcia-Camacho et al., 2022). The definition of the
states takes inspiration from works like (Aksoy et al.,
2011) where each change of contact interaction be-
tween hand, object, and environment was treated as
a different scene state, however, in our case changes
in the deformation category are also considered. The
states are enough to represent these manipulations,
but we note that other manipulations may require new
states. We also follow the same principles in robotic
manipulations, excluding only the semantic state S10:
middle edge grasp in Table 1 due to grasping-related
challenges.
As can be observed, each manipulation is com-
posed of a sequence of semantic states. For instance,
the uni-manual cloth manipulation folding sideways
(shown in the first column in Table 1) involves three
states: S1: flat, S2: flat semi-lifted with one gripper,
and S5: folded sideways. On the other hand, as shown
in the last column in Table 1, the bi-manual manipu-
lation edge grasping has only two states: S1: flat and
S10: middle edge grasp. Note that for the sake of clar-
ity, each manipulation task in Table 1 is shown with a
different textile object from our proposed dataset.
By labeling each frame under a semantic state,
we essentially project the relatively complex action
recognition problem into the simpler classification
task. However, it is worth noting that two different
time frames that fall under the same state can look
very different as shown in Table 1 and Fig. 4 which
makes the problem more ambiguous.
3.2 Data Collection and Annotation
We create a large-scale dataset showing various hu-
man manipulation and robotic demonstrations on dif-
ferent cloth types. During each demonstration, an
RGB video is recorded. Each extracted frame in hu-
man demonstrations is then manually annotated with
one of ten semantic states described in Table 1.
At the start of each demonstration, the cloth is
placed in the initial state, i.e., lying flat on the table or
bi-manually held in the air by two grippers that grasp
the opposite corners. For the sake of having more nat-
ural scenes, the initial flat position of the cloth also
contains slight deformations such as wrinkles.
To increase the amount of deformation, we in-
cluded a total of eighteen garments with various sizes
and shapes in our human demonstrations, while we
used four of these garments in our robotic manip-
ulations. Out of these garments, seven are square-
shaped, ten are rectangular, and one has smoothed
corners but is still square-shaped. During all these
manipulation demonstrations, we kept the table, grip-
pers, and background constant, and the RGB camera
was mostly stationary with only minor adjustments
introduced between manipulations.
In total, we collected 33.6K RGB images featur-
ing 10 different semantic states (Table 1) using 18 dis-
tinct textile objects, which were demonstrated by hu-
mans. For each garment, a minimum of five or more
demonstrations were performed, and the total number
of demonstrations was 264.
The annotation has been done manually through
human observation. To facilitate the heavy workload
of data labeling, the images are annotated once they
exhibit a state change. Otherwise, the remaining im-
age frames are automatically labeled with the last ad-
jacent state name. Some short and flickering states,
which either last less than 3 frames or are not in our
state list in Table 1, are omitted.
3.3 Semantic State Estimation
Framework
We treat the semantic state estimation as a classifica-
tion problem. For that purpose, we employ five dif-
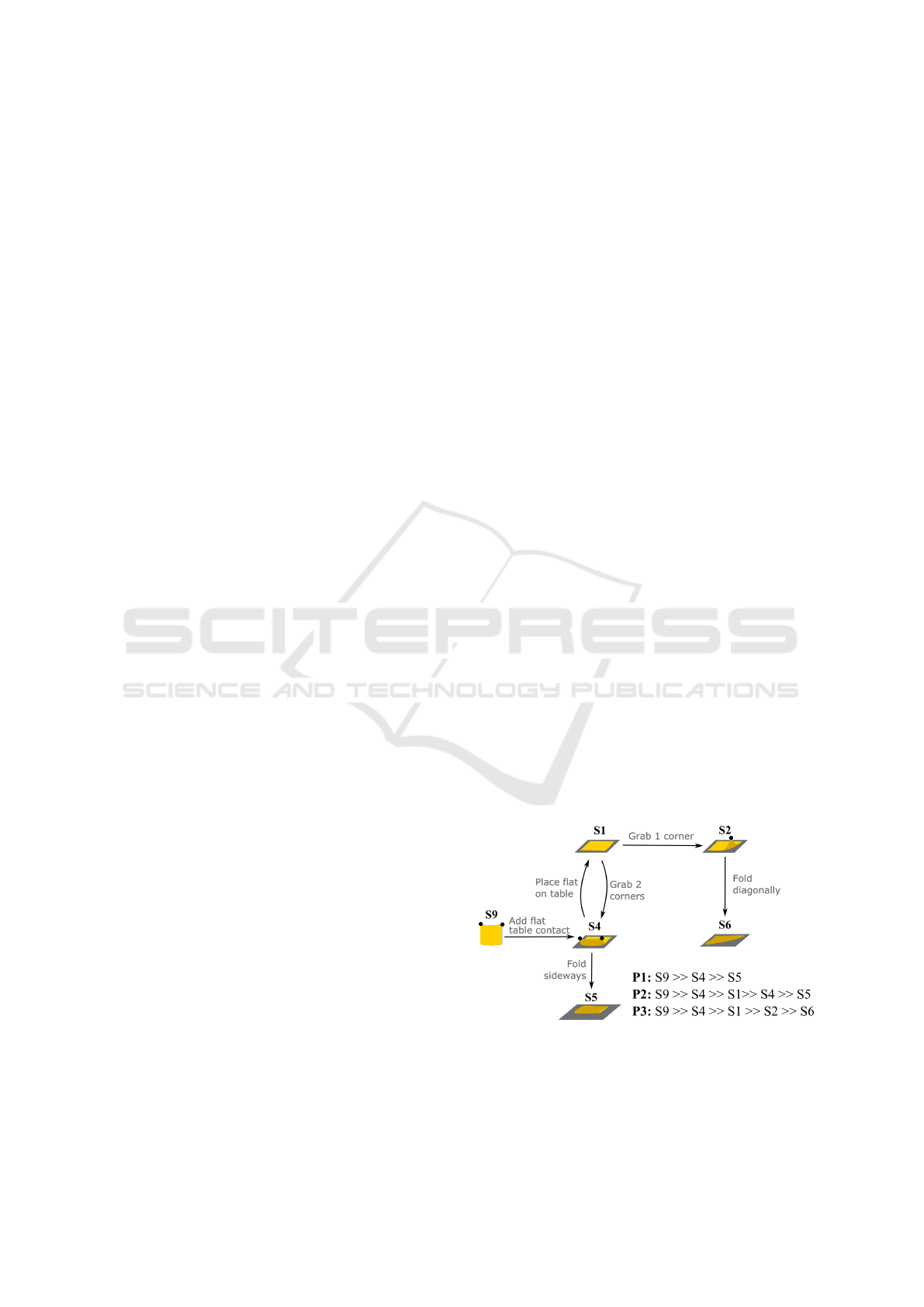
Figure 2: The three sample long manipulation scenarios are
presented as a graph of the semantic states. Following the
state definitions in Table 1, in these three test demonstra-
tions, the goal states are either S5: Folded sideways or S6:
Folded diagonally. All possible paths to reach the goals are
shown in the bottom right corner of the figure.
Semantic State Estimation in Robot Cloth Manipulations Using Domain Adaptation from Human Demonstrations
175

ferent advanced neural network classifiers (ResNet-
50 (He et al., 2016), ResNeXt-50 (Xie et al., 2017),
EfficientNet (Tan and Le, 2019), ConvNext (Tan and
Le, 2019), DeiT (Touvron et al., 2021)) and train them
using our labeled demonstrations in the source do-
main.
In order to validate the generalization and the scal-
ability of our method, we perform domain adapta-
tion, where we transfer the semantic states learned
from human demonstrations into two different robotic
platforms. To do so, we record five different robotic
manipulations with kitchen clothes and towels. Two
of those manipulations are P1 and P2 depicted in
Fig. 2, while the other three are the single gripper
manipulations Folding Diagonal, Dropping, and Lift-
ing. The domain adaptation is performed individually
from the human domain to each of these robotic do-
mains. Therefore, in our method, the human demon-
stration acts as the source domain, while the robotic
manipulations are the target domain.
Given the nature of video data, where time coher-
ence can be learned, prior to commencing the domain
adaptation training process, a preliminary step involv-
ing time contrastive learning is undertaken to impart
regularization to the latent space. This strategic ap-
proach is adopted to fine-tune the latent space across
both domains while preserving temporal awareness
and thus reducing the instability of domain adapta-
tion. We perform time contrastive learning on each
manipulation individually by minimizing the time
contrastive loss as follows:
L
tc
=max(∥ f (x
a
i
) − f (x
p
i
)∥
2
2
− ∥ f (x
a
i
) − f (x
n
i
)∥
2
2
+ α , 0) ,
where x
a
i
, x
p
i
and x
n
i
are the anchor, positive and nega-
tive samples. The hyperparameter α denotes the mar-
gin between positive and negative pairs. Notably, its
value is domain-dependent, as it is subject to varia-
tion across different domains arising from dissimilar
manipulation speed characteristics in each domain.
The selection of hyperparameters in the context of
both robotic domains depends on the choice of the
human domain. For the manipulation task denoted
as P1 in Fig. 2, the hyperparameter α is assigned
to be two times the positive range, which is 0.2 sec-
onds. Subsequently, the corresponding value of α is
adjusted within each respective robotic domain. This
adjustment process involves estimating the equivalent
value based on the duration of the human demonstra-
tion. In practice, the duration of robotic demonstra-
tions plays a crucial role. For instance, if the duration
of a robotic demonstration is longer in comparison
to a human demonstration, the associated value of α
is increased according to that difference in durations.
This approach seeks to maintain a consistent relation
between the manipulation speeds across domains.
Once the training is completed with known labels
in the source domain, we obtain the adjacency matrix
A for the neighboring state graph. For example, the
state S1 is a neighboring state with S2, but not with S3
since such a state transition to S3 is not possible with-
out visiting S2 (see Table 1). We then use the trained
network predictions and adjacency matrix A to de-
termine whether a prediction at time t + 1 is feasible
from time t. Starting at time t, we designate the cur-
rent frame as an anchor. If the prediction for the frame
at time t + 1 is feasible, we designate it as the new
anchor and continue. However, in case the predic-
tion is not feasible according to A , we provide a dis-
tance threshold T and examine whether other predic-
tions within that certain distance from the initial pre-
diction are feasible. If there are feasible predictions
within the predefined threshold, we choose the pre-
diction that is the closest to the current anchor. Other-
wise, we keep the prediction and the anchor remains
unchanged. This process allows us to autonomously
identify and eliminate wrong predictions in an unsu-
pervised manner. It is worth noting that the graph is
generated automatically from the training data.
4 EXPERIMENTS
We evaluate the effectiveness of semantic state esti-
mation networks in two different scenarios which in-
volve monitoring of human and robot manipulations.
In both cases, we use accuracy scores as the primary
evaluation metric to measure the correct classification
rate. For the human demonstrations, we employ su-
pervised training, whereas, for the robotic manipula-
tion, the training is completely unsupervised, as the
aim is for the manipulations to be learned from anno-
tated human demonstrations.
4.1 Human Demonstrations for
Training
In section 3.3, we trained five networks by partition-
ing our annotated dataset of 33.6K samples using a
75-25 stratified split. The optimization method of
our choice is stochastic gradient descent with warm
Table 2: Quantitative evaluation.
Validation Test Scores
Networks Scores White Orange Grid Average
ResNet-50 (He et al., 2016) 97.77 96.27 91.79 95.54 94.53
ResNeXt-50 (Xie et al., 2017) 97.50 95.67 92.30 95.51 94.49
EfficientNet (Tan and Le, 2019) 97.71 95.53 93.16 96.61 95.10
DeiT (Touvron et al., 2021) 98.20 93.85 86.18 91.60 90.54
ConvNext (Tan and Le, 2019) 98.45 96.92 94.16 97.02 96.03
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
176

restarts (Loshchilov and Hutter, 2016). We finetune
the network for 30 epochs with batch size 32 and
apply random cropping, flipping, and 15-degree ro-
tation during data augmentation. We wanted to en-
sure that the trained networks were not biased towards
any particular type of cloth, therefore, we excluded all
manipulations involving certain cloth types from the
training data and reserved them only for testing pur-
poses. For instance, all demonstrations featuring the
cloth Orange are reserved as unseen test data, while
the remaining data is utilized for training. We ap-
ply the same leave-one-out testing practice for the
garments White and Grid. Table 2 shows accuracy
scores in percentage (%) for the validation and indi-
vidual test cases with these three clothes. As shown
in Table 2, ConvNext (Liu et al., 2022) performs the
best on average in contrast to the other three networks.
Having a minor difference between the validation and
average test scores confirms that ConvNext is not bi-
ased with the cloth types in the training data.
4.2 Domain Adaptation for Robotic
Manipulations
We generated data in two different domains by per-
forming Folding Diagonal, Dropping, and Lifting ma-
nipulations, as outlined in Table 1 columns, using
both two Kinova and two Universal robot arms. These
robots act as the target domains for our domain adap-
tation network. Additionally, we executed two long
test scenarios (P1 and P2) described in Fig. 2 using
either of the same two robot arms. For instance, the
first scenario represents folding a cloth sideways by
following a path (P1 in Fig. 2) with three states: S9, S4
and S5, whereas the second scenario follows P2 with
five states to reach the same goal: S9, S4, S1, S4
and S5. The Universal Robot manipulation involved
four different garments (White, Orange, Green, and
Pink), while for the Kinova manipulator, we added
the Grid garment as well. A total of 48.2K frames
were collected from the robot executions, with about
12K frames used for testing the garments. Out of the
48, 2K frames, 15.5K were obtained from the UR ma-
nipulations and 32.7K from the Kinova robot.
Before initiating the train of domain adaptation,
we perform time contrastive learning to regularize the
latent space. We train the time contrastive loss with
Adam (Kingma and Ba, 2014) with initial learning
rate at 5e
−4
decreased to 5e
−5
. Then we choose for
the positive range to be 2 in the human domain, 4 in
the UR, and 6 for the Kinova, while the negative sam-
ples are chosen outside that range. We perform time
contrastive learning for 40 epochs.
As a source domain, we used the human demon-
stration data that were described in section 4.1, ex-
cluding the Edge Grasping manipulation. Addition-
ally, we included three long human demonstrations
(P1, P2, and P3) described in Fig. 2. For the tar-
get domain, like in section 4.1 we applied the same
policy by keeping one garment out as the unseen test
case and employing the rest to train the discrimi-
nator. For our testing, we selected squared-shaped
garments, specifically the Green, Orange, and Pink
ones, as they allow for diagonal folding. Our mod-
els were trained using a DANN architecture (Ganin
and Lempitsky, 2015) with a BSP loss (Chen et al.,
2019) and combined with a pre-trained ConvNext fea-
ture extractor from Imagenet. Since the same number
of classes are shared amongst all domains, we opted
to use the combination DANN-BSP because we ob-
tained the best results amongst other domain adapta-
tion methods such as CDAN (Chen et al., 2019) and
MCD (Saito et al., 2018). We also used Adam with
pre-warmed-up initial rate for training the classifica-
tion branch of DANN for 3 epochs which is decreased
to 5e
−5
. Due to the instability associated with domain
adaptation methods, we trained our network 5 times
for 50 epochs and reported the best score obtained
for each test scenario in Table 3. This table shows
that there is no significant bias among the tested gar-
ments, as they all show similar performance. Table 3
also indicates that our proposed post-process (PP) us-
ing the adjacency graph improves the network predic-
tions. Note also that the mean accuracy and standard
deviation scores in Table 3 increase over 5 training
sessions. Table 4 shows that using time contrastive
learning on the latent space before performing domain
adaptation contributes to stability. Note that Table 4
reports the average scores over 5 training sessions, un-
like Table 3 which reveals the best scores obtained.
Figure 3 shows the confusion matrices reporting
the network predictions for Kinova and UR robot ma-
nipulations. The diagonal of each matrix represents
the per-class prediction. We obtain high classification
accuracy for each state except one for each robot do-
main. For instance, S6 is mainly mixed with S2 in UR
robot manipulations, although the average accuracy
Table 3: Quantitative evaluation of domain adaptation. The
term w. PP stands for ”with post-process” using the adja-
cency graph. PP. M. STD stands for ”post-process mean
and standard deviation” and denotes the mean increase and
its standard deviation over 5 training sessions.
Garments
Green Orange Pink Average
Kinova 65.25 72.75 70.05 69.40
w. PP 66.60 73.35 71.95 70.65
PP. M. STD 1.28 ± 0.29 0.98 ± 0.14 1.32 ± 0.34 1.19 ± 0.26
UR 80.15 82.25 81.50 81.30
w. PP 80.45 83.65 82.45 82.20
PP. M. STD 0.62 ± 0.27 1.91 ± 0.21 1.05 ± 0.17 1.19 ± 0.21
Semantic State Estimation in Robot Cloth Manipulations Using Domain Adaptation from Human Demonstrations
177
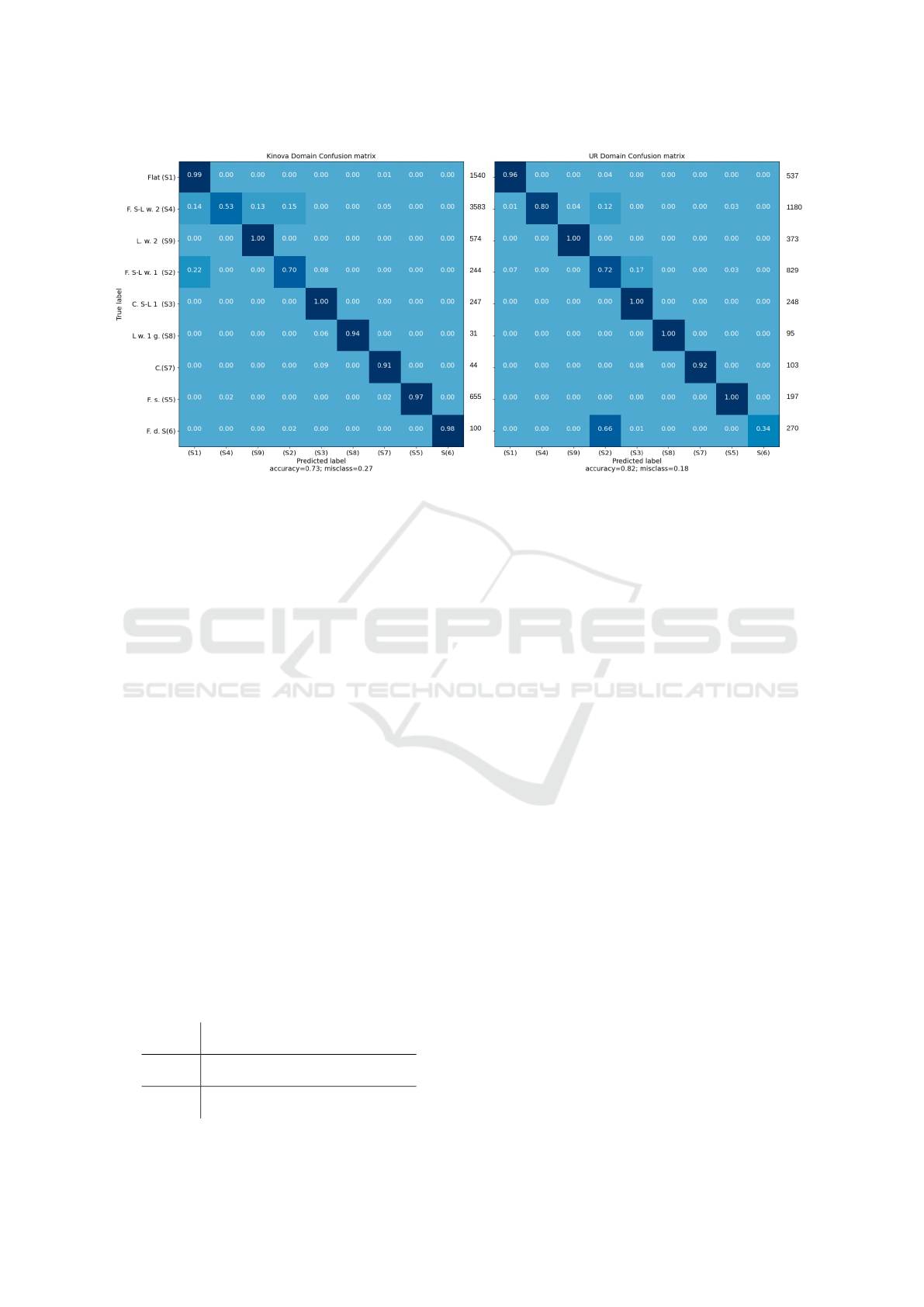
Figure 3: The confusion matrices for the network predictions in both the Kinova (on the left) and UR (on the right) domains.
The diagonal of each matrix represents the per-class prediction, while the number of samples is indicated on the right of each
matrix. The states are listed in the y-axis from top to bottom as follows: Flat (S1), Flat semi-lifted 2 grippers (S4), Lifted w.
2 grippers (S9), Flat semi-lifted 1 gripper (S2), Crumpled semi-lifted 1 gripper (S3), Lifted w. 1 gripper (S8), Crumpled (S7),
Folded sideways (S5), and Folded diagonally (S6).
still reaches up to 82%.
Figure 4 shows the network performance for hu-
man and robotic demonstrations of the same manipu-
lation scenario P1 described in Fig. 2. The red frames
depict incorrect predictions, which emerged, for in-
stance, before and after applying our knowledge from
the graph adjacency matrix, when the garment just
switched from states S9:lifted with two grippers to
S4:flat semi-lifted with two grippers. The blue frames
depict incorrect predictions only before the use of
post-processing. The colored blocks in Fig. 4 clearly
show that such false positive predictions are border-
line cases where the state is either about to change or
just switched to the next. It is worth mentioning that
even before applying the post-processing, predictions
which are incorrect are very similar to other states
(e.g. the state S4:Semi-lifted w. 2 grippers shares
similarities with the borderline case transition from
S1:Flat to S2:Semi-lifted w. 1 gripper when the grip-
pers are very close to the table).
We make use of the adjacency matrix information
Table 4: Ablation study of time contrastive learning. Each
number represents the average five training sessions. The
term TCL stands for ”time contrastive learning”.
Garments
Green Orange Pink Average
Kinova 53.10 57.25 54.95 55.10
w. TCL 58.25 65.75 63.30 62.45
UR 72.60 74.85 73.30 73.60
w. TCL 74.35 79.70 76.10 76.70
in the graph by applying an empirical threshold of
0.05. However, since each prediction at time t + 1 is
dependent only on the anchor or the prediction at time
t, we reset the anchor every 10 frames as the most
probable prediction. This is done to avoid carrying
the information of incorrect predictions and positions
on the graph nodes for an extended period.
5 DISCUSSION
We first would like to highlight the fact that in this
work, we do not propose any novel network model
but rather a novel framework transferring semantic
state estimations learned from human demonstrations
to robot manipulation tasks without requiring any ad-
ditional data annotation effort in the target robot do-
main. We show that the state-of-the-art models (e.g.,
ConvNext (Liu et al., 2022)) can already handle the
challenging state estimation problem. The reported
high accuracy scores in Table 2, Fig. 3, and Fig.4 al-
ready show that there is no need to focus on designing
new deep network architectures. Instead, we address
the domain shift problem where we use the rich in-
formation of the human-labeled dataset to make in-
ferences in two distinct robotic domains.
During domain adaptation, low per-class accura-
cies are observed in the states where the garment is
Diagonally Folded. For instance, in Fig. 3 S6 is con-
fused with S2 at the end of the manipulation with the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
178
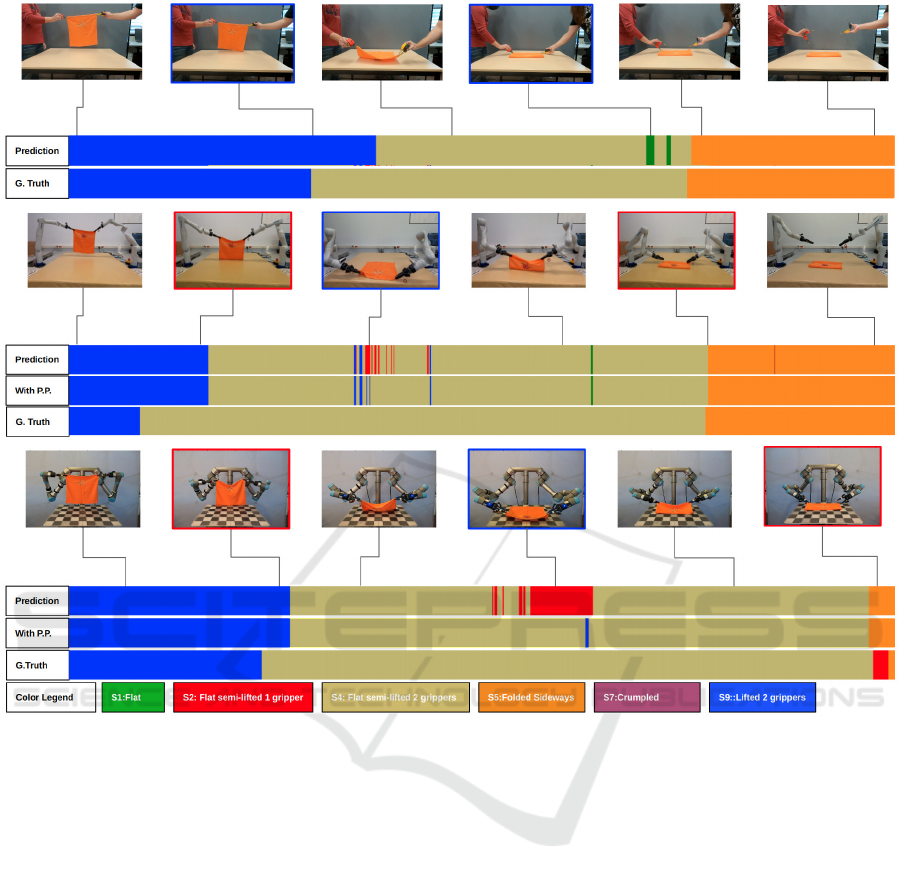
Figure 4: The event plots display the manipulation scenario P1, as described in Fig. 2. On the top, we show the network
performance for the human demonstration. Next, prediction results are illustrated for both the Kinova and UR robot manipu-
lators. The colored blocks in both cases represent the predictions made by the network, the predictions after post-processing
(PP), and the human-labeled ground truth. The red frames around images indicate false positive predictions before and after
post-processing, while the blue image frames represent predictions that are false positives only before post-processing. Note
that the post-processing is applied to the target robot domains only.
UR manipulator. S2 appears because one gripper re-
leases a corner before the other by just some frames,
but it may not be observable if the gripper is opened
or not. This leads to false detection of S2, probably
due to the fact that the network is placing too much
emphasis on the position of the gripper, rather than
the shape of the garment, particularly when it is not
visible whether the gripper is open or closed.
It is evident from Fig. 4 that the network’s wrong
predictions are mostly due to borderline cases where
two consecutive states are very similar to each other.
We here note that false state estimates, which are
irrelevant to borderline cases, can easily be solved
by incorporating temporal state information during
the monitoring task. As our network is focused on
single-frame predictions, we do not utilize informa-
tion on optical flow, which limits our ability to cap-
ture temporal coherence outside the post-processing
stage. This leads to difficulties during domain adap-
tation, for example, in manipulation scenario P2 the
network is unable to differentiate between the state of
S4: Semi-lifted w. 2 grippers when it occurs due to
lowering the garment versus lifting it.
From our experiments, we observe that domain
adaptation in dynamic cloth manipulation is highly
unstable. Thus, we train the network on average 5
times to achieve optimal performance. The predic-
tions are, however, improved when more target do-
main data are introduced.
Furthermore, we pose the following questions to
better understand the performance of our domain
adaptation framework:
Does the Post-Prediction Processing Improve the
Performance? In Table 3 and in Fig. 4 it is shown
Semantic State Estimation in Robot Cloth Manipulations Using Domain Adaptation from Human Demonstrations
179

that introducing prior knowledge from the graph ad-
jacency matrix significantly improves predictions in
every test case. Additional information (such as in-
tegrating the knowledge of manipulation success or
failure, or incorporating information from a prede-
fined plan) can further be utilized to improve the per-
formance.
What Is the Cause of the High Instability? The
instability associated with domain adaptation in our
framework poses a challenge for investigating im-
provements in the loss function. The results show
that the stability is increased by regularizing the la-
tent space with time contrastive learning. However,
it is difficult to ascertain whether any improvement
results from a better loss function or a randomly se-
lected initial weight before training. This instability
may limit our ability to make meaningful advance-
ments in the domain adaptation process.
How Can We Incorporate Temporal Coherence
During Training? Our approach to the semantic state
estimation problem is based on treating it as a classifi-
cation task without incorporating temporal coherence
during training. However, the non-linear transition
sequence between states in the P2 scenario depicted
in Fig. 2, where we return to the same state again,
highlights the limitations of techniques such as time
contrastive learning that rely solely on single frames.
We plan to investigate recurrent networks to capture
temporal information.
How Do We Deal with Cases Where the Cloth Is
in an Undefined State? Out-of-distribution classes
are difficult to handle in classification problems. In
our framework, when a new class is introduced dur-
ing learning, a human demonstration of that specific
class is required before the adaptation step is trig-
gered in the robot domain. However, it is not neces-
sary to demonstrate an entire manipulation sequence,
only the newly introduced class. Another method
of dealing with such cases is stochastic neural net-
works, where the uncertainty can be quantified and
acted upon.
6 CONCLUSION
In this paper, we presented and evaluated a novel
framework to solve the problem of semantic state es-
timation in continuous cloth manipulation tasks. We
make use of a convenient high-level semantic descrip-
tion of the cloth state which couples the cloth defor-
mation type, the grasping state, and the contact with
the environment. To validate our approach, we bench-
marked five different networks on our new dataset
coming with 33.6K annotated RGB images.
Furthermore, we show that our approach can be
used to learn a representation using labeled human
demonstrations, which can be further exploited to pre-
dict the semantic states in robotic manipulation tasks
in an unsupervised manner. This domain adaptation is
evaluated in two distinct robotic domains (Kinova and
UR5) and evaluated on unseen garments. To further
boost the prediction accuracy, we re-evaluated predic-
tions using the graph adjacency matrix learned from
the training data.
In future work, we plan to enlarge our dataset by
introducing a higher variety of deformable shapes (se-
mantic states) and more complex manipulation tasks.
Furthermore, we would like to incorporate the depth
cue which can capture geometrical information in the
scene, and thus, play a crucial role in autonomously
defining unseen textile deformations and planning a
proper grasping accordingly. We hope that the here
presented approach will be adopted by the cloth ma-
nipulation community and trigger further contribu-
tions to robotics.
REFERENCES
Aein, M. J., Aksoy, E. E., and W
¨
org
¨
otter, F. (2019). Library
of actions: Implementing a generic robot execution
framework by using manipulation action semantics.
The Int. Journal of Robotics Research, 38(8):910–934.
Aksoy, E. E., Abramov, A., D
¨
orr, J., Ning, K., Dellen, B.,
and W
¨
org
¨
otter, F. (2011). Learning the semantics of
object–action relations by observation. The Int. Jour-
nal of Robotics Research, 30(10):1229–1249.
Bednarik, J., Fua, P., and Salzmann, M. (2018). Learning
to reconstruct texture-less deformable surfaces from a
single view. In Int. Conf. on 3d vision (3DV), pages
606–615.
Bednarik, J., Parashar, S., Gundogdu, E., Salzmann, M.,
and Fua, P. (2020). Shape reconstruction by learning
differentiable surface representations. In IEEE/CVF
Conf. on Computer Vision and Pattern Recognition,
pages 4716–4725.
Borr
`
as, J., Aleny
`
a, G., and Torras, C. (2020). A grasping-
centered analysis for cloth manipulation. IEEE Trans-
actions on Robotics, 36(3):924–936.
Bousmalis, K., Trigeorgis, G., Silberman, N., Krishnan, D.,
and Erhan, D. (2016). Domain separation networks.
Advances in neural information processing systems,
29.
Chen, X., Wang, S., Long, M., and Wang, J. (2019). Trans-
ferability vs. discriminability: Batch spectral penal-
ization for adversarial domain adaptation. In Int. Conf.
on Machine Learning, pages 1081–1090.
Chi, C. and Song, S. (2021). Garmentnets: Category-
level pose estimation for garments via canonical space
shape completion. In IEEE/CVF Int. Conf. on Com-
puter Vision, pages 3324–3333.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
180

Corona, E., Alenya, G., Gabas, A., and Torras, C. (2018).
Active garment recognition and target grasping point
detection using deep learning. Pattern Recognition,
74:629–641.
Ganin, Y. and Lempitsky, V. (2015). Unsupervised domain
adaptation by backpropagation. In Int. Conf. on Ma-
chine Learning, pages 1180–1189.
Garcia-Camacho, I., Borr
`
as, J., and Aleny
`
a, G. (2022).
Knowledge representation to enable high-level plan-
ning in cloth manipulation tasks. In ICAPS Workshop
on Knowledge Engineering for Planning and Schedul-
ing.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In IEEE Conf. on
Computer Vision and Pattern Recognition, pages 770–
778.
Hoque, R., Seita, D., Balakrishna, A., Ganapathi, A., Tan-
wani, A. K., Jamali, N., Yamane, K., Iba, S., and
Goldberg, K. (2020). Visuospatial foresight for multi-
step, multi-task fabric manipulation. In Robotics: Sci-
ence and Systems.
Jangir, R., Aleny
`
a, G., and Torras, C. (2020). Dynamic
cloth manipulation with deep reinforcement learning.
In IEEE Int. Conf. on Robotics and Automation, pages
4630–4636.
Kampouris, C., Mariolis, I., Peleka, G., Skartados, E.,
Kargakos, A., Triantafyllou, D., and Malassiotis, S.
(2016). Multi-sensorial and explorative recognition
of garments and their material properties in uncon-
strained environment. In IEEE Int. Conf. on Robotics
and Automation, pages 1656–1663.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kumar, S., Cherian, A., Dai, Y., and Li, H. (2018). Scalable
dense non-rigid structure-from-motion: A grassman-
nian perspective. In IEEE Conf. on Computer Vision
and Pattern Recognition, pages 254–263.
Lee, R., Abou-Chakra, J., Zhang, F., and Corke, P. (2022).
Learning fabric manipulation in the real world with
human videos. arXiv preprint arXiv:2211.02832.
Li, Y., Wang, Y., Yue, Y., Xu, D., Case, M., Chang, S.-
F., Grinspun, E., and Allen, P. K. (2018). Model-
driven feedforward prediction for manipulation of de-
formable objects. IEEE Transactions on Automation
Science and Engineering, 15(4):1621–1638.
Lippi, M., Poklukar, P., Welle, M. C., Varava, A., Yin,
H., Marino, A., and Kragic, D. (2020). Latent space
roadmap for visual action planning of deformable and
rigid object manipulation. In IEEE/RSJ Int. Conf. on
Intelligent Robots and Systems, pages 5619–5626.
Liu, Z., Mao, H., Wu, C.-Y., Feichtenhofer, C., Darrell,
T., and Xie, S. (2022). A convnet for the 2020s.
In IEEE/CVF Conf. on Computer Vision and Pattern
Recognition, pages 11976–11986.
Long, M., Cao, Z., Wang, J., and Jordan, M. I. (2018). Con-
ditional adversarial domain adaptation. Advances in
neural information processing systems, 31.
Loshchilov, I. and Hutter, F. (2016). Sgdr: Stochastic
gradient descent with warm restarts. arXiv preprint
arXiv:1608.03983.
Mariolis, I., Peleka, G., Kargakos, A., and Malassiotis, S.
(2015). Pose and category recognition of highly de-
formable objects using deep learning. In Int. Conf. on
advanced robotics, pages 655–662.
Matas, J., James, S., and Davison, A. J. (2018). Sim-to-real
reinforcement learning for deformable object manip-
ulation. In Conf. on Robot Learning, pages 734–743.
PMLR.
Pumarola, A., Agudo, A., Porzi, L., Sanfeliu, A., Lepetit,
V., and Moreno-Noguer, F. (2018). Geometry-aware
network for non-rigid shape prediction from a single
view. In IEEE Conf. on Computer Vision and Pattern
Recognition, pages 4681–4690.
Qian, J., Weng, T., Zhang, L., Okorn, B., and Held, D.
(2020). Cloth region segmentation for robust grasp se-
lection. In IEEE/RSJ Int. Conf. on Intelligent Robots
and Systems, pages 9553–9560.
Ramisa, A., Alenya, G., Moreno-Noguer, F., and Torras, C.
(2013). Finddd: A fast 3d descriptor to characterize
textiles for robot manipulation. In IEEE/RSJ Int. Conf.
on Intelligent Robots and Systems, pages 824–830.
Ramisa, A., Alenya, G., Moreno-Noguer, F., and Torras, C.
(2016). A 3d descriptor to detect task-oriented grasp-
ing points in clothing. Pattern Recognition, 60:936–
948.
Saito, K., Watanabe, K., Ushiku, Y., and Harada, T. (2018).
Maximum classifier discrepancy for unsupervised do-
main adaptation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3723–3732.
Schulman, J., Lee, A., Ho, J., and Abbeel, P. (2013). Track-
ing deformable objects with point clouds. In IEEE Int.
Conf. on Robotics and Automation, pages 1130–1137.
Seita, D., Jamali, N., Laskey, M., Tanwani, A. K., Beren-
stein, R., Baskaran, P., Iba, S., Canny, J., and Gold-
berg, K. (2018). Deep transfer learning of pick points
on fabric for robot bed-making. In Robotics Research:
The 19th Int. Symposium ISRR.
Sermanet, P., Lynch, C., Chebotar, Y., Hsu, J., Jang, E.,
Schaal, S., Levine, S., and Brain, G. (2018). Time-
contrastive networks: Self-supervised learning from
video. In 2018 IEEE international conference on
robotics and automation (ICRA), pages 1134–1141.
IEEE.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Int.
Conf. on Machine Learning, pages 6105–6114.
Thananjeyan, B., Kerr, J., Huang, H., Gonzalez, J. E.,
and Goldberg, K. (2022). All you need is LUV:
Unsupervised collection of labeled images using uv-
fluorescent markings. In IEEE/RSJ Int. Conf. on In-
telligent Robots and Systems, pages 3241–3248.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and J
´
egou, H. (2021). Training data-efficient im-
age transformers & distillation through attention. In
Int. Conf. on Machine Learning, pages 10347–10357.
Tzeng, E., Hoffman, J., Saenko, K., and Darrell, T. (2017).
Adversarial discriminative domain adaptation. In
Semantic State Estimation in Robot Cloth Manipulations Using Domain Adaptation from Human Demonstrations
181

IEEE Conf. on Computer Vision and Pattern Recog-
nition, pages 7167–7176.
Verleysen, A., Biondina, M., and Wyffels, F. (2020). Video
dataset of human demonstrations of folding clothing
for robotic folding. The Int. Journal of Robotics Re-
search, 39(9):1031–1036.
Verleysen, A., Biondina, M., and Wyffels, F. (2022). Learn-
ing self-supervised task progression metrics: a case of
cloth folding. Applied Intelligence, pages 1–19.
W
¨
org
¨
otter, F., Aksoy, E. E., Kr
¨
uger, N., Piater, J., Ude, A.,
and Tamosiunaite, M. (2013). A simple ontology of
manipulation actions based on hand-object relations.
IEEE Transactions on Autonomous Mental Develop-
ment, 5(2):117–134.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In IEEE Conf. on Computer Vision and Pat-
tern Recognition, pages 1492–1500.
Yang, P.-C., Sasaki, K., Suzuki, K., Kase, K., Sugano, S.,
and Ogata, T. (2016). Repeatable folding task by
humanoid robot worker using deep learning. IEEE
Robotics and Automation Letters, 2(2):397–403.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
182
