
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple
Constraint Optimization
Mahdi Chamseddine
1,2 a
, Jason Rambach
1 b
and Didier Stricker
1,2 c
1
German Research Center for Artificial Intelligence (DFKI), Kaiserslautern, Germany
2
RPTU Kaiserslautern, Kaiserslautern, Germany
{firstname.lastname}@dfki.de
Keywords:
Calibration, Camera, Radar, Robotics.
Abstract:
The use of cameras and radar sensors is well established in various automation and surveillance tasks. The
multimodal nature of the data captured by those two sensors allows for a myriad of applications where one
covers for the shortcomings of the other. While cameras can capture high resolution color data, radar can
capture the depth and velocity of targets. Calibration is a necessary step before applying fusion algorithms
to the data. In this work, a robust extrinsic calibration algorithm is developed for camera-radar setups. The
standard geometric constraints used in calibration are extended with elevation constraints to improve the opti-
mization. Furthermore, the method does not rely on any external measurements beyond the camera and radar
data, and does not require complex targets unlike existing work. The calibration is done in 3D thus allowing
for the estimation of the elevation information that is lost when using 2D radar. The results are evaluated
against a sub-millimeter ground truth system and show superior results to existing more complex algorithms.
https://github.com/mahdichamseddine/CaRaCTO.
1 INTRODUCTION
Environment sensing is an integral task in many mod-
ern applications. Whether it is for robotics, surveil-
lance (Roy et al., 2009; Roy et al., 2011), autonomous
or assistive driving (Cho et al., 2014; Chavez-Garcia
and Aycard, 2015), sensors such as camera, radar, and
lidar are used to detect and classify objects and obsta-
cles in the respective environments. The sensors used
have different characteristics which make them com-
plementary rather than redundant. Cameras provide
high resolution color, texture, as well as context in-
formation whereas lidar and radar provide depth and
dimensions. While lidar data is of a higher spatial
density than radar data, the latter is more robust to
weather and lighting conditions and can measure ve-
locities.
Data from the different sensors is usually fused to-
gether to get a better understanding of the state of the
environment. Using the fused data, it is possible to
detect the different objects and obstacles using mul-
timodal features like dimensions and position, veloc-
a
https://orcid.org/0000-0003-4119-457X
b
https://orcid.org/0000-0001-8122-6789
c
https://orcid.org/0000-0002-5708-6023
ity and orientation, etc. (Sugimoto et al., 2004; Wang
et al., 2011; Wang et al., 2014; Kim and Jeon, 2014).
The tasks of sensor fusion however are preceded by
a necessary calibration that aligns the data from all
sensors in a common reference frame so that data as-
sociation is done correctly. This makes calibration an
essential step in any data processing problem.
Lidar sensors still suffer from high retail prices,
and as such have not seen as much commercial adop-
tion as cameras and radar sensors that have been
around for a much longer time. And even though high
resolution 3D radar sensors are starting to gain pop-
ularity (Stateczny et al., 2019; Wise et al., 2021), the
2D radar sensors are still the most widely used type of
radar in commercial applications. Therefore, the cali-
bration approach presented in this work is targeting a
2D radar and camera setup due to low price and wide
adoption.
In this work, an extrinsic calibration algorithm for
camera-radar systems is presented. Unlike other ap-
proaches which project the radar data to 2D, in this
approach, the elevation is not disregarded but rather
estimated with the help of the camera to realize 3D
reconstruction of targets. The work also aims to sta-
bilize the optimization problem against bad initializa-
tion and simplify the calibration setup to make it more
534
Chamseddine, M., Rambach, J. and Stricker, D.
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple Constraint Optimization.
DOI: 10.5220/0012369700003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 534-545
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Calibration Categories
Affine
Transformation
Projective
Transformation
Extrinsic
Calibration
Figure 1: The different calibration categories as presented
by Oh et al. (Oh et al., 2018). Our approach belongs to the
third category.
accessible while maintaining the same quality or im-
proving upon existing algorithms.
The main contributions can be summarized as:
• A camera-radar 3D calibration approach that does
not require external sensing.
• Improved optimization formulation with addi-
tional elevation constraints for improved stability.
• Evaluation against state-of-the-art approaches
using high accuracy optical measurements as
ground truth and showing significant improve-
ment.
The rest of the paper is structured as follows: Sec-
tion 2 discusses the related work and previous con-
tributions to the field. In Section 3 the problem is
defined, our used notation is explained and the sys-
tem model is described. The proposed method is pre-
sented in Section 4, and then evaluated in Section 5.
Finally, concluding remarks are given in Section 6.
2 RELATED WORK
Several works on camera-radar calibration have been
published. A comparative study by Oh et al. (Oh
et al., 2018) differentiates between three differ-
ent categories of camera-radar calibration (see Fig-
ure 1): affine transformations, projective transforma-
tions, and extrinsic calibration which is the target of
our work.
In the work by Wang et al. (Wang et al., 2011)
and Kim et al. (Kim and Jeon, 2014), an affine trans-
formation is calculated between the 2D radar points
and their corresponding pixel locations in the image.
Pseudo inverse is used to solve a least squares setup of
the two dimensional affine transformation. The qual-
ity of the transformation is measured using the im-
age distance of the transformed radar points relative
to their corresponding image points.
Whereas the 2D affine transformation calibration
estimates six out of nine transformation parameters,
the 2D projective transformation method estimates
the complete 3 × 3 homography between the radar
and camera planes. Sugimoto et al. (Sugimoto et al.,
2004) and then Wang et al. (Wang et al., 2014) use the
projective transformation method for camera-radar
calibration. Even though this method can provide
more accurate results for the calibration than affine
transforms, the calibration disregards the 3D repre-
sentation of the data and only provides point corre-
spondences from the radar plane to the camera plane.
The third calibration category is extrinsic cali-
bration, and the literature shows two different types:
multi-sensor extrinsic calibration combining camera,
lidar, and radar, and camera-radar only extrinsic cali-
bration.
Per
˘
si
´
s et al. (Per
ˇ
si
´
c et al., 2019) developed a radar-
lidar-camera calibration method where the 3D lidar
information is used to transform the radar frame in
2D and neglecting the elevation. The optimization is
then performed in the 2D radar plane to estimate a
transformation (rotation and translation) between the
different sensors. Domhof et al. (Domhof et al., 2019)
treat the radar data similarly and euclidean error in 2D
is used for solving the optimization and calculating
the extrinsic parameters. They additionally designed
a complex joint target for camera, lidar, and radar.
Using a 3D radar sensor, Wise et al. (Wise
et al., 2021) develop a continuous extrinsic calibration
method that makes use of the extra dimension mea-
surement as well the radar velocity measurement to
develop a calibration algorithm that does not require
radar retroreflectors. While their method properly
takes into consideration the 3D nature of the problem
and the complexity of using specialized targets, it is
limited in application to less widely used 3D radars.
Unlike other camera-radar calibration methods, El
Natour et al. (El Natour et al., 2015a) formulates the
problem with the underlying assumption that the 2D
representations in the image and radar data corre-
spond to targets in 3D, thus the optimization is done
using the 3D form and using the distance between
multiple targets to recover the full 3D representation
from 2D sensors. This allows for 3D reconstruction
of targets after the system is calibrated. However, to
achieve this result, multiple targets need to be present
and the distance between them measured accurately.
The authors try to overcome this limitation in (El Na-
tour et al., 2015b) by moving the sensor system while
keeping the targets fixed and adding the sensor trajec-
tory estimation.
In our work, an extrinsic calibration algorithm is
presented to estimate the rotation and translation be-
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple Constraint Optimization
535

tween the camera and radar sensors and using the 3D
representation of the targets. In contrast to prior work,
only a single retroreflector is used without the need
for a complex target design. Furthermore, the algo-
rithm is made stable even with sub-optimal initial-
ization through additional elevation constraints and
the results are verified against other works using high
quality ground truth system for the first time in such
evaluations.
3 PROBLEM DEFINITION
Extrinsic calibration is the task of calculating the
transformation (rotation and translation), between the
coordinate systems of different sensors. The transfor-
mation can then be used to project a point from one
system to the other and also reconstruct the 3D posi-
tion.
For radar calibration, a specific target is used to
collect and reflect the received radar signal. Such tar-
get is called a retroreflector characterized by its abil-
ity to reflect radiation back at its source (i.e. radar)
with minimal scattering. In this work, a corner re-
flector is used which has a pyramidal shape made of
3 right isosceles triangles joined at their vertex angle
(see Figures 3 and 4).
3.1 Notation
Since the calibration algorithm estimating the extrin-
sic transformation between two different sensors, it is
first necessary to define the notation used in the rest of
the sections and for this the notation defined in (Ram-
bach et al., 2021) is used.
Let m
a
= [x
a
,y
a
,z
a
]
⊤
be the point m in a coordi-
nate system A. The rotation and translation to convert
m from system A to system B are then defined as R
ba
and b
a
respectively such that R
ba
represents the rota-
tion from coordinate system A to B and b
a
is the origin
of system B represented in system A. The transforma-
tion and its inverse can then be written as
m
b
= R
ba
(m
a
− b
a
),
m
a
= R
ab
(m
b
− a
b
),
(1)
where R
ab
= R
−1
ba
= R
⊤
ba
and a
b
= −R
ba
b
a
. Thus, m
b
can be expressed as
m
b
= R
ba
m
a
+ a
b
. (2)
Finally, the homogeneous transformation H
ba
from coordinate system A to B can then be expressed
as
H
ba
=
R
ba
a
b
0 1
. (3)
3.2 System Model
The sensor setup is a radar-camera system connected
rigidly and separated by a short baseline much smaller
than the distance to the measured target. To avoid
confusion in the terminology, the coordinate systems
will be referred to as C for camera and S for radar
(sensor). It then follows that R
cs
and R
sc
are the ro-
tations from the radar to the camera system and its
inverse respectively. Similarly, c
s
is the origin of the
camera in the radar coordinate system s
c
is the origin
of the radar in the camera coordinate system.
The camera model used is the pinhole model
shown in Figure 2a, and it is used to project a point
m
c
= [x
c
,y
c
,z
c
]
⊤
in the camera coordinate system to
p = [u, v, 1]
⊤
on the image plane.
z
c
p = Km
c
,
z
c
u
v
1
=
f
x
0 u
0
0 f
y
v
0
0 0 1
x
c
y
c
z
c
,
(4)
where K is the intrinsic parameters matrix of the cam-
era and is be calculated using the standard method
in (Zhang, 2000) and u and v are the pixel coordinates
of the point in an image. The radar is a frequency-
modulated continuous-wave (FMCW) radar that re-
turns the range, azimuth, doppler velocity, as well as
radar cross section (reflection amplitude). Only the
range and azimuth (ρ,θ) are used for the calibration.
It can be noticed that the radar does not provide any
elevation information φ, with φ representing the angle
with positive z-axis. The general representation of the
point m
s
= [x
s
,y
s
,z
s
]
⊤
in the radar coordinate system
is shown in Figure 2b and defined as
x
s
= ρ sin φ cos θ,
y
s
= ρ sin φ sin θ,
z
s
= ρ cos φ,
(5)
since φ is usually unknown, output can only be in-
terpreted in 2D in other approaches (Sugimoto et al.,
2004; Wang et al., 2011; Wang et al., 2014; Kim and
Jeon, 2014; Per
ˇ
si
´
c et al., 2019; Domhof et al., 2019)
and is assumed that φ = π/2.
Overall, a radar point in the radar coordinate sys-
tem can be represented in the camera coordinate sys-
tem using
m
c
= R
cs
m
s
+ s
c
,
or
m
c
1
= H
cs
m
s
1
.
(6)
Figure 2c shows the same target represeted in both
camera and radar coordinate systems. Combin-
ing Equation (4) with Equation (6), a relationship de-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
536
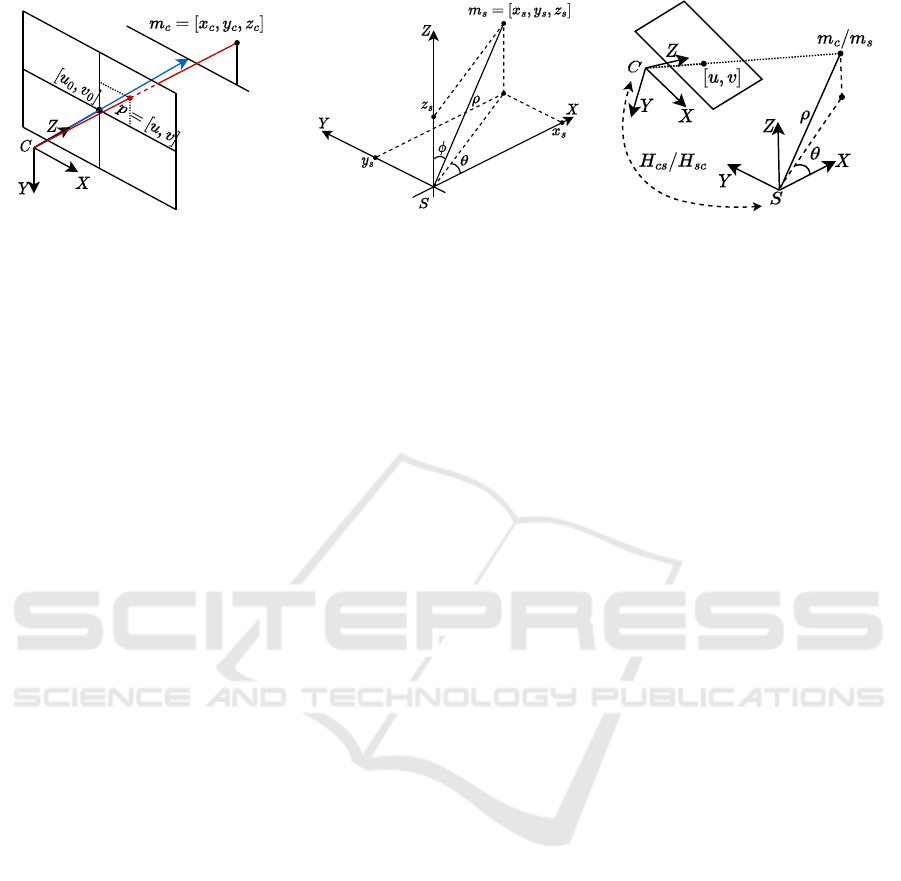
(a) (b) (c)
Figure 2: (a) and (b) show the measurement setup of both the camera and radar respectively. The pinhole model in (a) shows
how an object in 3D can be represented in the camera coordinate system, and the pixel representation on the image plane. The
radar data in (b) is measured in spherical coordinates, the diagram shows how they can be visualized as cartesian coordinates.
(c) shows how an object visible in both the camera and radar frames can be represented in either frames and the transformation
can be used to go from one representation to the other.
scribing a transformation between the radar and im-
age data is then defined as follows
z
c
p = [K|0]H
cs
m
s
1
, (7)
where the K matrix is extended by a zero column to
match the dimensions of the H matrix.
4 PROPOSED APPROACH
Our goal is to setup a system of equations to com-
pute the residuals for the optimization. The residuals
are minimized by finding the parameters of the ex-
trinsic calibration. We first define the geometric rela-
tions that describe the measurements, we then formu-
late the optimization, and finally we reconstruct the
3D point cloud using the estimated calibration param-
eters.
4.1 Geometric Constraints
Using the measurement principles of the sensors used,
different constraints and relationships can be ob-
served. Given that the distance of a target to the radar
is measured, the locus of the target can be restricted
to a sphere of radius ρ centered at the radar
x
2
s
+ y
2
s
+ z
2
s
= ρ
2
. (8)
Knowing the azimuth angle of the target with re-
spect to the radar positive x-axis, target also belongs
to a plane passing through the radar center and per-
pendicular to the xy-plane. The normal vector to the
plane is simply defined at the angle (θ + π/2). Thus
the unit normal vector to the plane passing through
the target point and the radar center is
⃗
n = (cos (θ + π/2),sin (θ + π/2),0)
= (− sin θ, cos θ, 0),
or
⃗
n = (sin θ, − cos θ, 0).
(9)
The locus of the target in the radar coordinate sys-
tem can then be restricted to the intersection between
the sphere defined in Equation (8) and the plane
x
s
sinθ − y
s
cosθ = 0, x
s
> 0, (10)
the condition that x
s
> 0 means that the target should
belong to the positive semi-circle in front of the radar.
The target also belongs to the line passing through
the camera center and (u,v), the target’s projection on
the image plane. This line intersects the semi-circle
from Equations (8) and (10) at one point representing
the position of the target in 3D.
4.2 Optimization Formulation
Based on the constraints defined earlier, an optimiza-
tion system is setup based on Equations (8) and (10)
as follows
x
2
s
+ y
2
s
+ z
2
s
− ρ
2
= ε
1
,
x
s
sinθ − y
s
cosθ = ε
2
,
(11)
where ε
1
and ε
2
are the residuals to be minimized as
to ensure the 3D radar points satisfy the constraints.
The position of the target in the image is then used to
derive the representation of m
s
= [x
s
,y
s
,z
s
]
⊤
in terms
of (u, v) and H
sc
. From Equation (7) the following
can be derived
m
s
1
= H
−1
cs
z
c
K
−1
p
1
= H
sc
z
c
K
−1
p
1
=
R
sc
c
s
0 1
z
c
K
−1
p
1
,
(12)
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple Constraint Optimization
537

Figure 3: Top: Detection of corners of calibration target, a
minimum of 4 points is needed to solve the PnP problem.
Bottom: the reprojected solution of the PnP problem
(green).
where R
sc
= R
γ
R
β
R
α
and α, β, and γ are the rota-
tion angles around x, y, and z respectively. So the
parameters to be estimated are the three rotation an-
gles and the three translations represented by c
s
=
[x
c
s
,y
c
s
,z
c
s
]
⊤
.
The last unknown to be estimated in Equation (12)
is z
c
. Existing work (El Natour et al., 2015a) tack-
les the problem by using a minimum of six fixed tar-
gets and accurate measurement of the distances be-
tween them to estimate z
c
, whereas (El Natour et al.,
2015b) requires the ability to move the whole radar
camera system to estimate z
c
as part of the optimiza-
tion. However, in this work we introduce two methods
to estimate z
c
with a single target measured at differ-
ent positions thus simplifying the setup significantly.
4.2.1 Method 1: Using Radar Range as an
Estimate for z
c
Since z
c
is a measure of depth of a target with respect
to the camera, and since the radar can directly detect
a target’s depth, it is logical to benefit from the multi-
modal measuring capabilities of the sensor setup and
use z
c
= ρ. This assumption is limited to the case
when the baseline between the camera and the radar
is much smaller than the measured distance and when
the camera and radar are close to each other.
4.2.2 Method 2: Using Camera
Correspondences to Calculate z
c
This method overcomes the limitations of the first
method and removes the short baseline requirement.
Using the known dimensions of the radar retroreflec-
tor and intrinsic calibration matrix K, it is possible to
solve the perspective-n-point (PnP) problem to obtain
the 6 DoF pose in the camera coordinate system (Lep-
etit et al., 2009). The euclidean distance to the center
of the retroreflector is then used as z
c
.
The target can be detected and matched to a la-
beled template to align the corners using the GMS
Feature Matcher (Bian et al., 2017), the PnP prob-
lem is then solved on the aligned corners. It is worth
noting that restricting the search area results in more
reliable matching. Figure 3 shows the reprojection of
the reflector corners. A small reprojection error indi-
cates the correctness of the pose estimation.
4.3 Elevation Constraint
In addition to the residuals defined in Equation (11),
an extra residual is added as a stabilizing term to the
optimization and limit the pitch angle beta from de-
viating and speed up converging. Radar sensors are
characterized with a relatively narrow vertical field of
view (±15
◦
) and thus the data is distributed around
the xy-plane. Based on those characteristics the stabi-
lizing residual is defined
|z
s
| = ε
3
, (13)
The system of optimization equations is solved
using the Levenberg-Marquardt (LM) non-linear
least squares optimization (Mor
´
e, 1978). The
desired outcome is to find the set of parame-
ters [α,β,γ,x
c
s
,y
c
s
,z
c
s
] (rotation angles and transla-
tions) that minimizes the sum of squared residuals
from Equations (11) and (13), (ε
1
)
2
i
+ (ε
2
)
2
i
+ (ε
3
)
2
i
,
for each measured target i.
Overall we can formulate the objective function as
argmin
α,β,γ,x
c
s
,y
c
s
,z
c
s
∑
∀i
(ε
1
)
2
i
+ (ε
2
)
2
i
+ (ε
3
)
2
i
. (14)
4.4 Point Cloud Reconstruction
The computed extrinsic calibration is used to fuse
the radar and camera measurement and retrieve the
3D coordinates of targets similar to (El Natour et al.,
2015a). Using the pinhole model in Equation (4), a
point m
c
can be represented in terms of the image co-
ordinates and the intrinsic calibration matrix K
m
c
= z
c
K
−1
p = z
c
q, (15)
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
538

Figure 4: Top: the camera-radar setup with the reflective
markers, the calibration target, three OptiTrack cameras.
Bottom: OptiTrack cameras detecting the calibration target
(green) and the sensor (blue) in 3D.
where q = [q
1
,q
2
,q
3
]
⊤
= K
−1
p. To compute z
c
, the
equation of the sphere in Equation (8) is used in the
camera coordinate system and replacing the values for
m
c
as in Equation (15)
(x
c
− x
s
c
)
2
+ (y
c
− y
s
c
)
2
+ (z
c
− z
s
c
)
2
= ρ
2
⇒z
2
c
(q
2
1
+ q
2
2
+ q
2
3
) − 2z
c
(q
1
x
s
c
+ q
2
y
s
c
+ q
3
z
s
c
)
+ (x
2
s
c
+ y
2
s
c
+ z
2
s
c
− ρ
2
) = 0.
(16)
The solution to the quadratic equation in Equa-
tion (16) yields two possible solutions. The cor-
rect solution is the one that gives a closer results of
m
s
= H
sc
m
c
to Equation (5) with φ = π/2.
5 EVALUATION
The results of the algorithm are evaluated against the
work of El Natour et al. (El Natour et al., 2015a).
This is the only existing camera-radar 3D calibra-
tion method for 2D radar devices for static calibra-
tion. The evaluation of both methods is done for the
first time against highly accurate ground truth mea-
surements from an optical tracker.
5.1 Ground Truth Acquisition
The evaluation calibration algorithms and 3D recon-
struction requires an accurate and precise method for
measuring the ground truth values. Therefore, an
optical motion capture (OptiTrack) system that can
achieve < 1 mm localization error is used. This sys-
tem is only used for a quantitative evaluation of the
calibration results, and not part of the calibration al-
gorithm.
Eighteen OptiTrack Flex 13
1
cameras are
mounted as to cover the empty space where the
calibration target is placed. Reflective markers are
placed on both the sensor and the calibration targets
to be detected by the cameras. Both the camera-radar
setup as well as the calibration target are visible in
the cameras’ field of view at all times thus allowing
the accurate measurement of their relative positions.
Since the motion capture system uses infrared
light to detect the reflective markers, the calibration
measurements with this type of ground truth are only
possible to perform indoors for validation purposes.
5.2 Hardware Setup
The radar in use is an Analog Devices TinyRad
2
, this
radar is an evaluation module operating at 24 GHz
with a range resolution of 0.6 m and an azimuth reso-
lution 0.35 rad.
The camera used carries a 2 megapixels sensor ca-
pable of recording full HD images (1080p) at 30 FPS
(frames per second) with a 78
◦
FOV (field-of-view).
The sensors are mounted with the camera on top
of the radar with a short baseline ≈ 5 cm as seen
in Figure 4.
5.3 Initialization
Knowing the difference in coordinate system orienta-
tions between the camera and radar, an initial param-
eter vector [α
0
,β
0
,γ
0
,0,0,0] is used to roughly align
the axes and thus speed up the convergence of the ro-
tation matrix.
While (El Natour et al., 2015a) uses stereo based
3D reconstruction to calculate their ground truth as
well as their required a priori inter-target distance,
this paper reproduces their work using the more accu-
rate OptiTrack data instead. The inter-target distance
is used to solve an optimization problem to calculate
the z
c
values needed to solve the main optimization
problem.
Furthermore, it was not possible to reproduce and
converge the z
c
solution from (El Natour et al., 2015a)
using a zero vector for initializing the optimization.
Since the original authors provide no instructions to
reproduce their work, the radar range ρ is used for
1
https://optitrack.com/cameras/flex-13/
2
https://www.analog.com/en/design-center/evaluation-
hardware-and-software/evaluation-boards-kits/eval-
tinyrad.html
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple Constraint Optimization
539

initialization to achieve proper estimates. Another
method is to manually measure the distances which
would further complicate their approach.
5.4 Calibration Results
Different evaluation criteria are used to evaluate the
quality of the calibration both in 3D and 2D. The
convergence of the optimization is tested against dif-
ferent initializations and the quality of the calibra-
tion is evaluated against the number of measurements
needed as well as the level of noise level in the mea-
surement. In addition to that, an ablation study of the
elevation constraint is performed to show its impor-
tance.
The error in 3D is the distance between the esti-
mated 3D reprojection of the target and the ground
truth as measured by the OptiTrack system, and the
error in 2D is the distance between the projection of
the estimated 3D target and the ground truth on the
xy-plane.
5.4.1 Evaluation of the Initialization
To evaluate the effect of initialization on the cali-
bration, the optimization is performed with different
starting parameters while maintaining the same setup
in all experiments. Table 1 show that both approaches
presented in this work achieved the same average er-
rors and standard deviations for all initialization con-
ditions as well as significantly outperformed the rival
approach. The initialization levels are defined as
Best: [α
0
,β
0
,γ
0
,0,0,0],
Moderate: [α
0
,β
0
,γ
0
,0,0,0] + µ
1×6
,
Bad: [α
0
,β
0
,γ
0
,0,0,0] + ν
1×6
,
where µ
1−3
∈[−1 rad, 1 rad] & µ
4−6
∈ [−0.1, 0.1]
and ν
1−3
∈[−2 rad, 2 rad] & ν
4−6
∈ [−0.5, 0.5],
(17)
the components of µ and ν are uniformly sampled
from the respective ranges and added to the initial-
ization parameters described in Section 5.3. The re-
sults also show that the rival method was able to op-
timize the 2D projection on the xy−plane better than
3D space.
Our approaches show consistently better results
regardless of the initialization and both in 3D as well
as 2D projections both on the radar plane and the im-
age plane. It is also worth noting the lower standard
deviation accompanied with the lower error indicates
higher confidence as well a better fit to the data.
5.4.2 Evaluation of the Number of Targets
Another experiment was performed to observe the de-
pendency of the calibration algorithms on the num-
ber of measurements needed. The LM implementa-
tion (Mor
´
e, 1978) requires the number of residuals to
be greater than or equal to the number of parameters
to be estimated. As mentioned in Section 4.3, we are
estimating 6 parameters [α, β, γ, x
c
s
,y
c
s
,z
c
s
], and each
measured target position generates 3 residuals, thus a
theoretical minimum of 2 target positions are needed.
However, our experiments showed that in practice, 5
target positions are needed to converge to a valid so-
lution.
The results in Figure 5 show significantly lower
dependency on the number of targets for our ap-
proaches and even though some improvement can be
seen with more measurements, the calibration yielded
with only 5 measurements, an error more than five
times lower than (El Natour et al., 2015a) with 36
measurements for 3D reconstruction and two times
lower for 2D. This experiment was repeated 250 times
for each n ∈ [[5, 36]] measurements randomly sampled
without replacement out of the 36 measurements. The
results are the averaged over the runs.
The poor performance of the method of El Na-
tour (El Natour et al., 2015a) on our data does not
come as a surprise if we consider that their real-
data evaluation published in (El Natour et al., 2015a)
shows an error that is a few orders of magnitude worse
than the error on simulated data. In their real-data
evaluation, (El Natour et al., 2015a) shows a mean er-
ror of 0.63 m, on a longer range and in an outdoor
setting which is less affected by multi-path interfer-
ence.
5.4.3 Simulations of Noise Levels
We simulated the effect of different levels of noise on
the reconstruction error of our calibration algorithm.
We identified three main sources of noise: radar range
measurement ρ, radar azimuth measurement θ, and
camera pixel error (u,v). In this experiment, the Opti-
Track ground truth measurements are used as a base-
line (level − 0) and define our noise levels such that
for each target i we have
ρ
i
l
= ρ
i
0
+ N (0,(0.05 × l)
2
),
θ
i
l
= θ
i
0
+ N (0,(0.01 × l)
2
),
(u
i
l
,v
i
l
) = (u
i
0
+ N (0,l
2
),v
i
0
+ N (0,l
2
)),
(18)
where l is the noise level, N is the normal distribu-
tion, and l ∈ [[1,10]], and ρ
i
0
, θ
i
0
, and (u
i
0
,v
i
0
) are
the level − 0 measurements.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
540
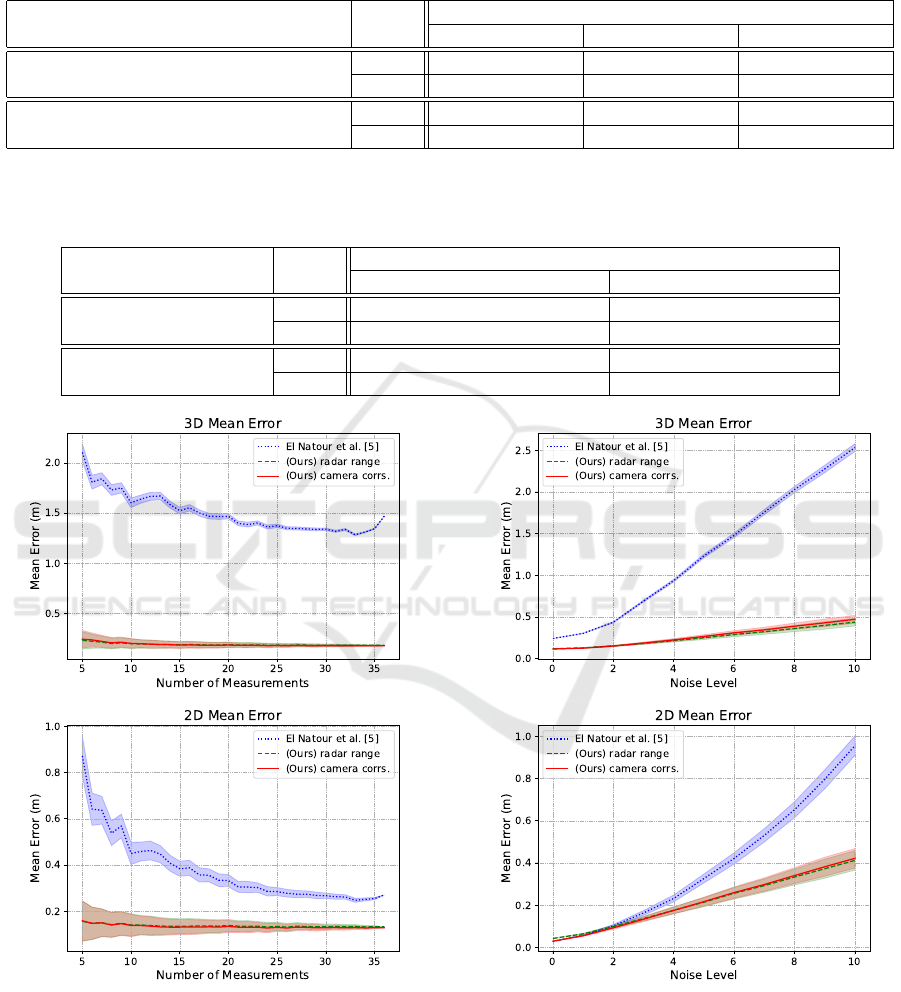
Table 1: A comparison of the mean error in meters between our method and (El Natour et al., 2015a). Different initializa-
tion setups are used to evaluate the sensitivity of the optimizations to their starting point. Where Best: [α
0
,β
0
,γ
0
,0,0,0],
Moderate: [α
0
,β
0
,γ
0
,0,0,0] + µ
1×6
∋ {µ
1−3
∈ [−1 rad,1 rad] & µ
4−6
∈ [−0.1,0.1]}, and Bad: [α
0
,β
0
,γ
0
,0,0,0] + ν
1×6
∋
{ν
1−3
∈ [−2 rad,2 rad] & ν
4−6
∈ [−0.5, 0.5]}.
Method Error
Initialization
Best Moderate Bad
Using camera
correspondences (ours)
3D 0.175 m ± 0.049 0.175 m ± 0.049 0.175 m ± 0.049
2D 0.129 m ± 0.065 0.129 m ± 0.065 0.129 m ± 0.065
El Natour et al. (El Natour et al., 2015a)
3D 1.474 m ± 0.640 1.474 m ± 0.640 1.606 m ± 0.440
2D 0.272 m ± 0.166 0.272 m ± 0.166 0.313 m ± 0.090
Table 2: An ablation study showing the effect of adding the constraint in Equation (13) to the optimization and the difference
between using the radar range and camera correspondences to calculate the distance to the target. The experiments were done
using the Best initialization parameters [α
0
,β
0
,γ
0
,0,0,0].
Method Error
Results
Without Eq. (13) constraint With Eq. (13) constraint
Using radar range
(ours)
3D 1.369 m ± 0.620 0.180 m ± 0.053
2D 0.250 m ± 0.152 0.133 m ± 0.067
Using camera
correspondences (ours)
3D 1.546 m ± 0.676 0.175 m ± 0.049
2D 0.293 m ± 0.182 0.129 m ± 0.065
Figure 5: The effect of the number of measured targets on
the result of the calibration and subsequently on the quality
of the 2D and 3D reconstruction. Our methods (overlapping
red and green) show better error even for a low number of
measurements.
Figure 6: Our methods (overlapping red and green) show
resilience to the increasing noise levels for both 2D and 3D
reconstruction and achieve a worst case of 0.5 m mean error
for 3D reconstruction. Both methods outperform (El Natour
et al., 2015a) which performs 5 times worse in 3D recon-
struction and 2 times worse in 2D reconstruction at noise
level 10.
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple Constraint Optimization
541

Figure 6 shows the 2D and 3D target reconstruc-
tions errors for the different noise levels. We can see
our method outperforming (El Natour et al., 2015a)
in for all levels of noise in 3D reconstruction. For 2D
reconstruction, all three methods show similar recon-
struction error for level −0 noise, however, (El Natour
et al., 2015a) quickly diverges after level − 4 noise.
This experiment was repeated 250 times for all noise
levels, and show our methods’ robustness to noise.
5.4.4 Ablation Study of the Elevation Constraint
To highlight the importance of our elevation con-
straint, defined in Equation (13), we ran an ablation
study on both of our range calculation methods. This
was done using the Best initialization parameters as
described in Equation (17) and the results can be seen
in Table 2. The mean errors achieved without using
the elevation constraint are considerably higher than
the results achieved when including it. The errors
without the constraint in Equation (13) are also close
to the results of (El Natour et al., 2015a) as seen in Ta-
ble 1. This is expected because the main difference
between them is the distance calculation method. We
observe that before adding the constraint, our method
using the radar range for distance measurement per-
formed better than the method using the camera cor-
respondences, this result was reversed after adding the
constraint.
6 CONCLUSION
In this work, we introduced a new method for extrin-
sic calibration of a camera-radar system. The method
was tested against a high-accuracy motion capture
system, which served as the ground truth. Our setup
is not only simpler, as it operates independently with-
out external sensing, but it also delivers superior re-
sults. Even with less accurate initial parameters and
fewer measurement points, the additional optimiza-
tion constraints we introduced allow the calibration
to converge effectively. We also utilized the calibra-
tion output to reconstruct the 3D targets from the data
matched by the camera-radar system. Instead of more
complicated target designs, our streamlined setup re-
quires fewer calibration targets and merely uses a
single standard retroreflector. While our current ap-
proach only focuses on static targets, calibrating on
a moving target would likely yield better radar target
detection. However, this would come at the cost of
complicating the process, including the setup and tar-
get detection phases of our work.
ACKNOWLEDGMENT
This work has been partially funded by the Ger-
man Ministry of Education and Research (BMBF) of
the Federal Republic of Germany under the research
project RACKET (Grant number 01IW20009). Spe-
cial thanks to Stephan Krauß, Narek Minaskan, and
Alain Pagani for their insightful remarks and discus-
sions.
REFERENCES
Bian, J., Lin, W.-Y., Matsushita, Y., Yeung, S.-K., Nguyen,
T.-D., and Cheng, M.-M. (2017). Gms: Grid-based
motion statistics for fast, ultra-robust feature cor-
respondence. In Conference on Computer Vision
and Pattern Recognition (CVPR), pages 4181–4190.
IEEE.
Chavez-Garcia, R. O. and Aycard, O. (2015). Multiple sen-
sor fusion and classification for moving object detec-
tion and tracking. IEEE Transactions on Intelligent
Transportation Systems, 17(2):525–534.
Cho, H., Seo, Y.-W., Kumar, B. V., and Rajkumar, R. R.
(2014). A multi-sensor fusion system for moving ob-
ject detection and tracking in urban driving environ-
ments. In International Conference on Robotics and
Automation (ICRA), pages 1836–1843. IEEE.
Domhof, J., Kooij, J. F., and Gavrila, D. M. (2019). An
extrinsic calibration tool for radar, camera and lidar. In
International Conference on Robotics and Automation
(ICRA), pages 8107–8113. IEEE.
El Natour, G., Aider, O. A., Rouveure, R., Berry, F., and
Faure, P. (2015a). Radar and vision sensors calibration
for outdoor 3d reconstruction. In International Con-
ference on Robotics and Automation (ICRA), pages
2084–2089. IEEE.
El Natour, G., Ait-Aider, O., Rouveure, R., Berry, F., and
Faure, P. (2015b). Toward 3d reconstruction of out-
door scenes using an mmw radar and a monocular vi-
sion sensor. Sensors, 15(10):25937–25967.
Kim, D. Y. and Jeon, M. (2014). Data fusion of radar
and image measurements for multi-object tracking via
kalman filtering. Information Sciences, 278:641–652.
Lepetit, V., Moreno-Noguer, F., and Fua, P. (2009). Epnp:
An accurate o (n) solution to the pnp problem. Inter-
national journal of computer vision, 81(2):155–166.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In Proceedings of the 7th international joint con-
ference on Artificial intelligence (IJCAI), volume 2,
pages 674–679.
Mor
´
e, J. J. (1978). The levenberg-marquardt algorithm: im-
plementation and theory. In Numerical analysis, pages
105–116. Springer.
Oh, J., Kim, K.-S., Park, M., and Kim, S. (2018). A com-
parative study on camera-radar calibration methods.
In International Conference on Control, Automation,
Robotics and Vision (ICARCV), pages 1057–1062.
IEEE.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
542

OpenCV (2023a). Camera calibration and 3d reconstruc-
tion.
OpenCV (2023b). Object detection.
Per
ˇ
si
´
c, J., Markovi
´
c, I., and Petrovi
´
c, I. (2019). Extrin-
sic 6dof calibration of a radar–lidar–camera system
enhanced by radar cross section estimates evaluation.
Robotics and Autonomous Systems, 114:217–230.
Rambach, J., Pagani, A., and Stricker, D. (2021). Principles
of object tracking and mapping. In Springer Hand-
book of Augmented Reality, pages 53–84. Springer.
Roy, A., Gale, N., and Hong, L. (2009). Fusion of
doppler radar and video information for automated
traffic surveillance. In 12th International Conference
on Information Fusion, pages 1989–1996. IEEE.
Roy, A., Gale, N., and Hong, L. (2011). Automated traffic
surveillance using fusion of doppler radar and video
information. Mathematical and Computer Modelling,
54(1-2):531–543.
Stateczny, A., Kazimierski, W., Gronska-Sledz, D., and
Motyl, W. (2019). The empirical application of auto-
motive 3d radar sensor for target detection for an au-
tonomous surface vehicle’s navigation. Remote Sens-
ing, 11(10):1156.
Sugimoto, S., Tateda, H., Takahashi, H., and Okutomi,
M. (2004). Obstacle detection using millimeter-
wave radar and its visualization on image sequence.
In International Conference on Pattern Recognition
(ICPR), volume 3, pages 342–345. IEEE.
Wang, T., Zheng, N., Xin, J., and Ma, Z. (2011). Integrating
millimeter wave radar with a monocular vision sensor
for on-road obstacle detection applications. Sensors,
11(9):8992–9008.
Wang, X., Xu, L., Sun, H., Xin, J., and Zheng, N. (2014).
Bionic vision inspired on-road obstacle detection and
tracking using radar and visual information. In In-
ternational Conference on Intelligent Transportation
Systems (ITSC), pages 39–44. IEEE.
Wise, E., Per
ˇ
si
´
c, J., Grebe, C., Petrovi
´
c, I., and Kelly, J.
(2021). A continuous-time approach for 3d radar-to-
camera extrinsic calibration. In International Con-
ference on Robotics and Automation (ICRA), pages
13164–13170. IEEE.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. IEEE Transactions on pattern analysis and
machine intelligence, 22(11):1330–1334.
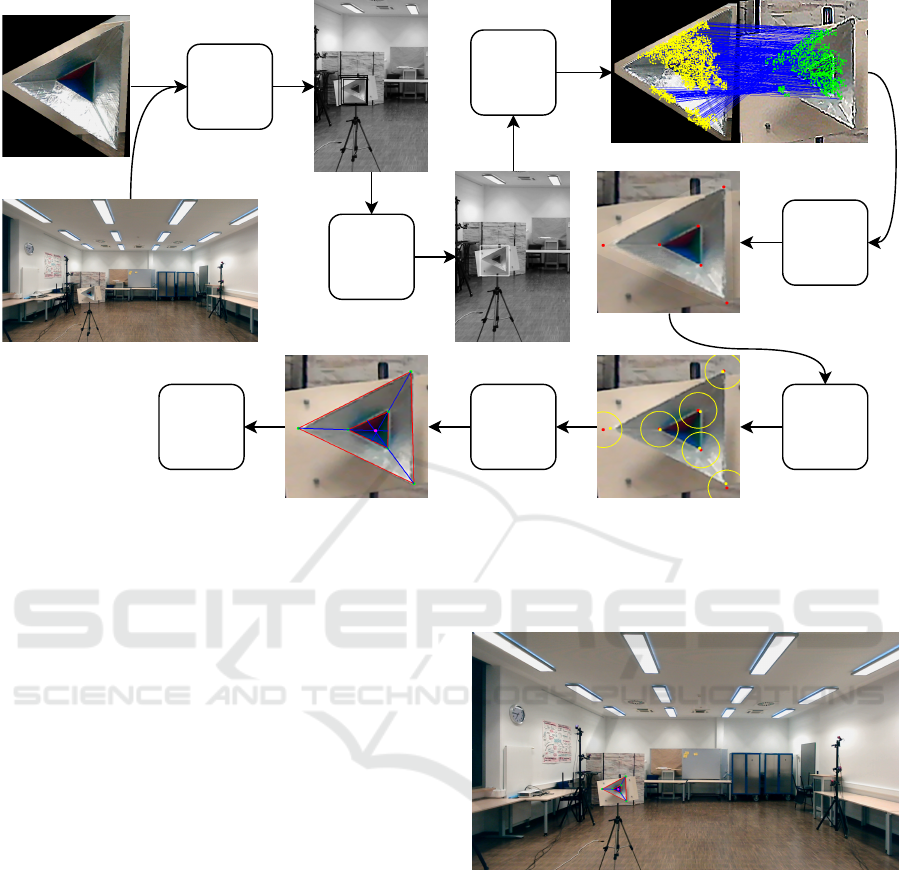
APPENDIX
Target Matching in Camera Frames
In this section we will explain in detail the process of
automatically detecting the calibration target as well
its corners and center as required in Section 4.2.2.
This step is a decoupled problem from the calibra-
tion algorithm and other approaches are available to
achieve this task.
Figure 7: A sample input frame where the corner targets
must be detected.
Template Matching
Given a sample input frame as shown in Figure 7, it
is desired to first find the location of the target in the
frame to reduce the search space for feature matching
and improve its robustness.
Figure 8: (left) Patch of the calibration target to be used as
a template. (right) Masked version of the patch.
A template (Figure 8) is used to find the candi-
date positions of the target in the input frame. Tem-
plate matching (OpenCV, 2023b) is applied to the in-
put frame with different scales and rotations of the
template. Our experiments show that masking out the
clutter around the target in the template as seen in Fig-
ure 8 yields more robust detection.
The template matching results in multiple can-
didate positions that are merged depending on their
overlap value with a vote being assigned to the
merged patch corresponding to the number of can-
didates merged at that position. The result of steps
(1) and (2) of Figure 9 shows the candidate positions
before and after merging as well as the final selected
patch in the input frame.
Template Alignment
After finding the desired patch, we use the GMS Fea-
ture Matcher (Bian et al., 2017) to detect correspon-
dences between the template and the selected patch.
The GMS Matcher allows for more robust feature
matching between the two patches. Figure 9 shows
the result of the feature matching (3) after resizing
the patches to similar dimensions and applying edge
enhancing filtering.
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple Constraint Optimization
543
Input Frame
Template
-1-
Template
Matching
-2-
Best
Candidate
-3-
Feature
Matching
-4-
Template
Alignment
-5-
Refine
Alignment
-6-
Find
Center
-7-
Reproject
to Input
Figure 9: The complete diagram describing the detection of the target. (1) Generate candidate positions of the template
matching. (2) Find best patch location. (3) Match features between the template and the chosen patch location. (4) Align the
template to the patch, the red dots represent the known corner positions of the template. (5) Refine the corner positions, the
yellow dots show the refined position of the corner. (6) Calculate the center point as the intersection of the lines connecting
the corners. (7) Reproject the center to the original image.
The matched features are used to compute the
homography (OpenCV, 2023a)and align the template
to the image patch. Step (4) of Figure 9 presents
the aligned template on top of the image patch, the
red dots represent the known corner positions in the
template. The figure shows that some refinement is
needed for proper alignment of the corners.
Corner Refinement
To further refine the position of the corners in the im-
age patch, we apply Lukas-Kanade method (Lucas
and Kanade, 1981) for sparse optical flow. We as-
sume small changes in the corner position from one
image to the other and apply the method for each cor-
ner separately for more robust results. Figure 9 shows
the result of the corner refinement in yellow (5), the
circle around the original red corner position has a ra-
dius of 50 pixels (image is upscaled by 3.5 times).
Center Detection
After detecting the corners on the target, the detection
of the center becomes straightforward, by connecting
the corners of both triangles and finding the mean in-
tersections between the 3 lines as seen in Figure 9.
Finally, Figure 10 shows the position of the center
point obtained in the original image.
Figure 10: The target center point projected back to the
original image.
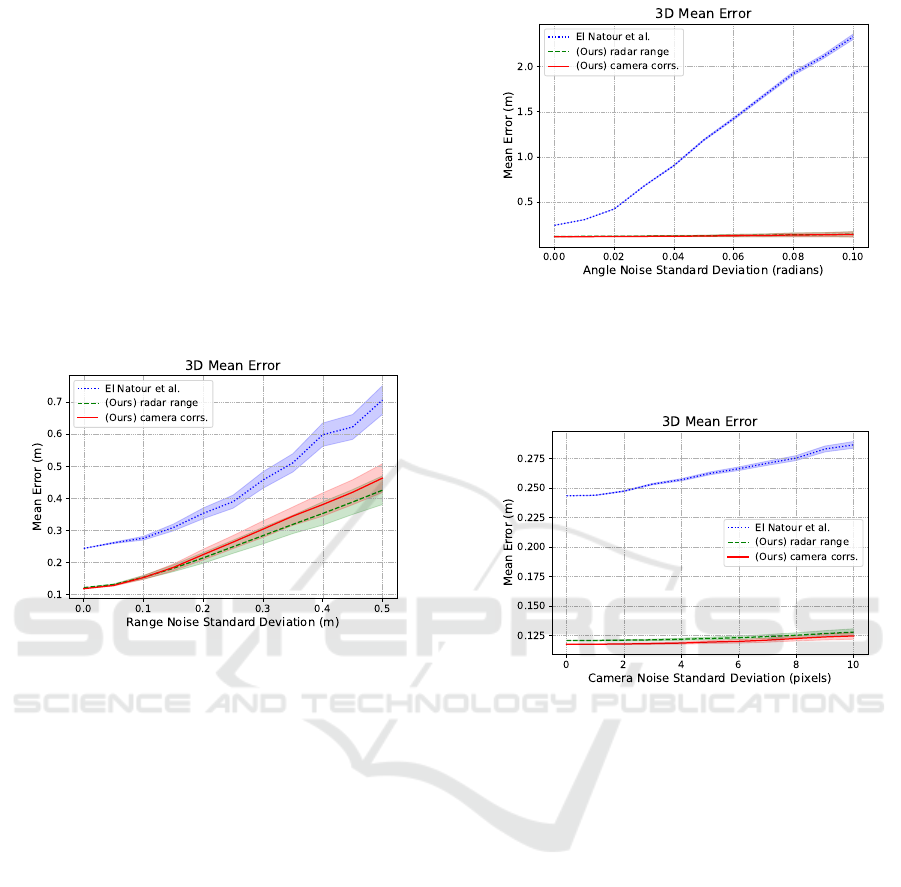
Decoupled Noise Simulations
In addition to the experiments presented in Sec-
tion 5.4.3 on the combined noise levels, we per-
formed 3 experiments exploring the decoupled effects
of the added noise. Similar to the simulations in Sec-
tion 5.4.3, we ran the experiments 250 times for each
noise level, and averaged over the runs. The noise is
defined similar to Section 5.4.3 as
ρ
i
l
= ρ
i
0
+ N (0,(0.05 × l)
2
),
θ
i
l
= θ
i
0
+ N (0,(0.01 × l)
2
),
(u
i
l
,v
i
l
) = (u
i
0
+ N (0,l
2
),v
i
0
+ N (0,l
2
)),
(19)
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
544
where l is the noise level, N is the normal distribu-
tion, and l ∈ [[1,10]], and ρ
i
0
, θ
i
0
, and (u
i
0
,v
i
0
) are
the level − 0 measurements. For each of the experi-
ments noise is added to one of the parameters while
level − 0 noise is used for the other two.
Radar Range Noise
Simulating radar range noise shows a similar increase
in 3D mean error for both our methods and (El Natour
et al., 2015a). Figure 11 shows that our methods out-
perform El Natour et al. (El Natour et al., 2015a) over
for all standard deviation values with the difference
growing slightly the larger the noise standard devia-
tion.
Figure 11: The mean error in 3D reconstruction as a func-
tion of the standard deviation of the added noise to the
range.
Radar Azimuth Noise
Figure 12 shows that noise in the radar azimuth
measurement has the biggest effect on the quality
of (El Natour et al., 2015a) while our methods are
much more robust to this type of noise. The mean re-
construction error of (El Natour et al., 2015a) shoots
to more than 2 m for a noise standard deviation of
0.1 rad while our methods maintain an error lower
than 0.25 m for the same range.
Camera Pixel Noise
Introducing noise of up to 10 pixels to all methods had
the smallest effect on all methods. While our methods
show an average increase in 3D reconstruction error
of around 1 cm, El Natour et al. (El Natour et al.,
2015a) increase by 2 to 3 cm.
Analysis of Results
The experiments show the robustness of our method
to different sources of noise with the radar range noise
Figure 12: The mean error in 3D reconstruction as a func-
tion of the standard deviation of the added noise to the az-
imuth angle. The method by El Natour et al. (El Natour
et al., 2015a) shows very high sensitivity to the azimuth
noise.
Figure 13: The mean error in 3D reconstruction as a func-
tion of the standard deviation of the added noise to the target
pixel location.
having the biggest effect on our 3D reconstruction re-
sults. On the other hand, the method in (El Natour
et al., 2015a) shows a lot of sensitivity to variations
in the radar azimuth measurements, and overall lower
accuracy of the 3D reconstruction of the measurement
targets.
CaRaCTO: Robust Camera-Radar Extrinsic Calibration with Triple Constraint Optimization
545
