
End-to-End Chess Recognition
Athanasios Masouris and Jan C. van Gemert
Computer Vision Lab, Delft University of Technology, Delft, The Netherlands
Keywords:
Chess Recognition, Chess Dataset, Computer Vision, Deep Learning.
Abstract:
Chess recognition is the task of extracting the chess piece configuration from a chessboard image. Current
approaches use a pipeline of separate, independent, modules such as chessboard detection, square localization,
and piece classification. Instead, we follow the deep learning philosophy and explore an end-to-end approach
to directly predict the configuration from the image, thus avoiding the error accumulation of the sequential
approaches and eliminating the need for intermediate annotations. Furthermore, we introduce a new dataset,
Chess Recognition Dataset (ChessReD), that consists of 10,800 real photographs and their corresponding
annotations. In contrast to existing datasets that are synthetically rendered and have only limited angles,
ChessReD has photographs captured from various angles using smartphone cameras; a sensor choice made to
ensure real-world applicability. Our approach in chess recognition on the introduced challenging benchmark
dataset outperforms related approaches, successfully recognizing the chess pieces’ configuration in 15.26% of
ChessReD’s test images. This accuracy may seem low, but it is ≈7x better than the current state-of-the-art and
reflects the difficulty of the problem. The code and data are available through: https://github.com/ThanosM97/
end-to-end-chess-recognition.
1 INTRODUCTION
Parsing a chess position from a (smartphone) image
eases match analysis and facilitates coaching of chil-
dren, offering chess positions without writing each
move down (Figure 1). Chess position recognition
requires accurate identification of each chess piece’s
type and position on a chessboard configuration. The
predominant approach (Xie et al., 2018a; Mehta,
2020; Czyzewski et al., 2020; W
¨
olflein and Arand-
jelovi
´
c, 2021) is to split it into independent sequential
sub-tasks: chessboard detection, square localization,
and piece classification within each square. We here
depart from the observation that such independent
sub-tasks suffer from error accumulation throughout
each intermediate independent step. In this paper,
we do away with the sequential independent sub-tasks
and propose an end-to-end approach for chess recog-
nition, directly predicting the positions of the pieces,
with respect to the chessboard, from the entire image.
One key advantage of our approach is that it does
not require any human input beyond the input im-
age itself, unlike traditional methods (Sokic and Ahic-
Djokic, 2008; Ding, 2016; Neto and Campello, 2019;
W
¨
olflein and Arandjelovi
´
c, 2021) that rely on user
input, such as manually selecting the corners of the
chessboard or defining the player’s perspective. By
leveraging a deep neural network, the model is able
to extract and use relevant visual features to efficiently
recognize the chessboard, predict the pieces’ type and
positions directly from a single image.
To evaluate and facilitate our learning-based ap-
proach we need a large and good quality dataset. Cur-
rently, there is no real-world chess recognition dataset
and thus, we introduce our own novel real-world
Chess Recognition Dataset (ChessReD) , which we
openly share with the community
1
. Our ChessReD
dataset consists of 10, 800 images and their corre-
sponding annotations, allowing us to effectively train
and evaluate approaches. Although there might be a
human preference for certain viewpoint (Van Gemert,
2011), we capture a diverse collection of chessboard
images, covering various viewing angles, lighting
conditions, camera specifications, and piece config-
urations. This dataset enables both further research
in chess recognition algorithms and a realistic bench-
mark.
Our approach in chess recognition on our
ChessReD benchmark outperforms related ap-
proaches, achieving a board recognition accuracy of
15.26% (≈7x better than the current state-of-the-art).
Our contributions can be summarized as follows.
• We introduce ChessReD: the first dataset of real
images for chess recognition, with high viewing
1
https://data.4tu.nl/datasets/
99b5c721-280b-450b-b058-b2900b69a90f
Masouris, A. and van Gemert, J.
End-to-End Chess Recognition.
DOI: 10.5220/0012370200003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
393-403
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
393
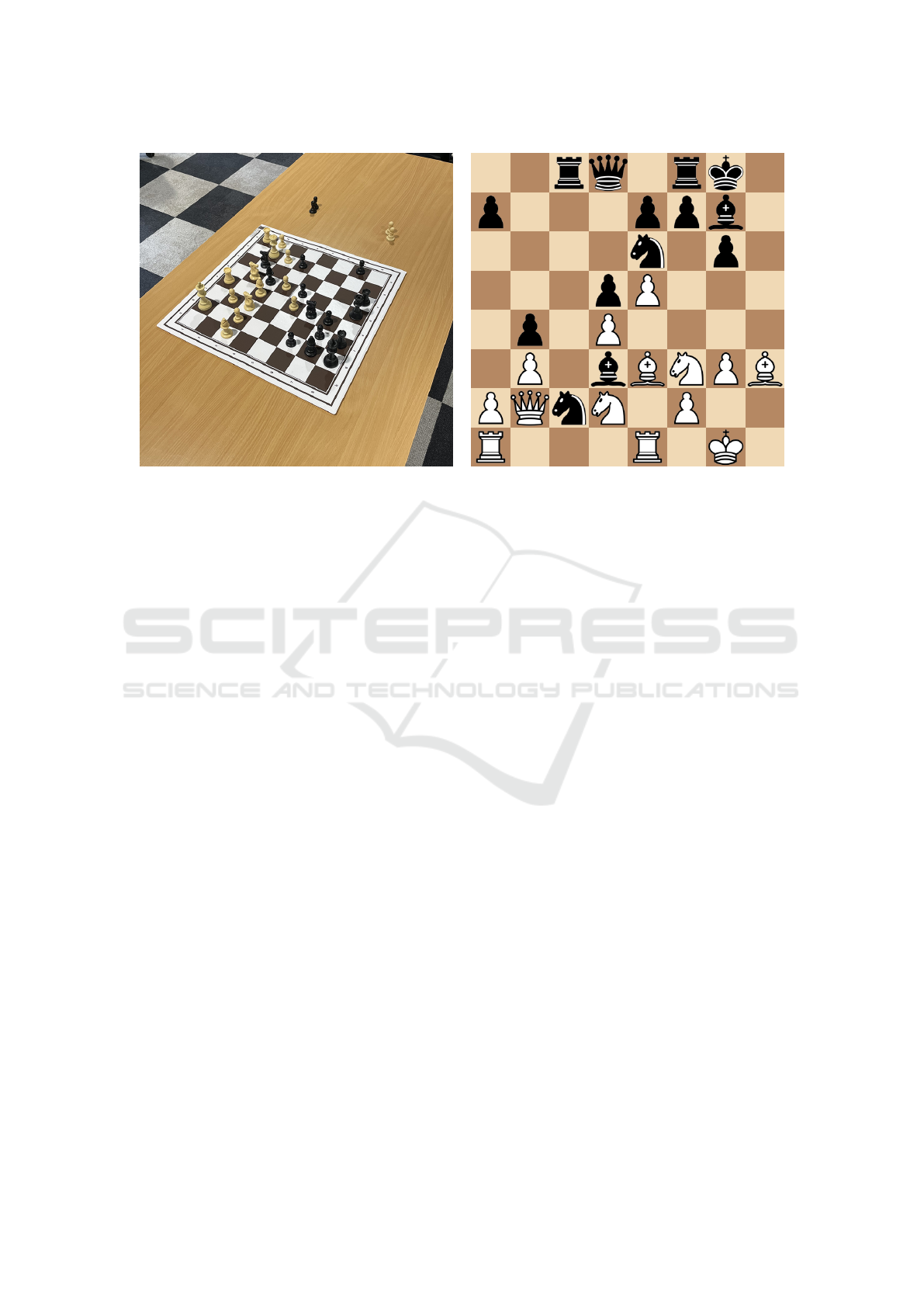
Figure 1: Chess recognition input image and output configuration.
angle variability and diversity in chess formations,
compared to synthetic alternatives.
• We demonstrate end-to-end chess recognition
with improved performance compared to alterna-
tives that rely on a sequential pipeline of indepen-
dent components.
2 RELATED WORK
Early Approaches in Chess Recognition. Chess
recognition has been a subject of research in the field
of computer vision, with several approaches proposed
to tackle the challenges associated mainly with de-
tecting the chessboard, but also with recognizing the
individual pieces on top of it. Early attempts in the
field primarily focused on integrating the chess recog-
nition task as a part of a chess-playing robotic system
(Urting and Berbers, 2003; Sokic and Ahic-Djokic,
2008; Matuszek et al., 2011; Banerjee et al., 2011).
These systems detected chess moves by comparing
the previous frame, with a known game state, to the
current frame. They relied on detecting the occupied
squares of the chessboard along with the colors of the
pieces occupying them. As such, these methods were
only able to detect valid chess moves and failed to de-
tect events when two pieces of the same color were
swapped, either illegally, or by promoting pawns to
another piece type. Additionally, they worked under
the assumption that the previous inferred state is cor-
rect. Thus, in case of an erroneous move prediction,
all of the subsequent game states would be incorrect.
Despite the aforementioned issues, the same approach
has been adopted by several studies (Wang and Green,
2013; Koray et al., 2016; Chen et al., 2016; Neto and
Campello, 2019; Chen and Wang, 2019; Kołosowski
et al., 2020) since, with consecutive frames obtained
also from a video stream (Sokic and Ahic-Djokic,
2008; Wang and Green, 2013; Koray et al., 2016).
In our paper, contrary to these approaches, we aim to
develop a robust method that does not rely on the cor-
rectness of the previous inferred state but rather per-
forms chess recognition from a single input image.
Chessboard Detection. For cases when the previ-
ous state is unknown, chess recognition from a single
image has also been the focus of studies. Same as
with the previously mentioned approaches, the first
step is to employ image processing techniques to de-
tect the chessboard and the individual squares; a chal-
lenging task even on its own. While it can be simpli-
fied by explicitly asking the user to select the four cor-
ner points (Sokic and Ahic-Djokic, 2008; Ding, 2016;
Neto and Campello, 2019), modifying the chessboard
(Urting and Berbers, 2003; Banerjee et al., 2011;
Danner and Kafafy, 2015) (e.g. using a reference
frame around the chessboard), or setting constraints
on the camera view angle (e.g. top-view) (Urting
and Berbers, 2003; Sokic and Ahic-Djokic, 2008;
Banerjee et al., 2011; Wang and Green, 2013; Koray
et al., 2016; Neto and Campello, 2019; Mehta, 2020),
Neufeld et al. (Neufeld and Hall, 2010) recognized
that these approaches do not represent a general solu-
tion, where the chessboard could be in arbitrary loca-
tions or the image taken from various camera angles.
They proposed a line-based detection method which
they combined with probabilistic reasoning. How-
ever, they also restricted the setting by expecting the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
394

camera angle to be in the range of a human player’s
perspective. Other studies have also exploited spe-
cific viewing angles, such as the players’ perspec-
tives (Ding, 2016; Chen et al., 2016; Chen and Wang,
2019; W
¨
olflein and Arandjelovi
´
c, 2021) or side views
(Danner and Kafafy, 2015; Quintana et al., 2020).
While chessboard detection utilizing the Harris cor-
ner detection algorithm (Banerjee et al., 2011; Ko-
ray et al., 2016; Kołosowski et al., 2020), template
matching (Urting and Berbers, 2003; Matuszek et al.,
2011), or flood fill (Wang and Green, 2013) have
been explored, in accordance with (Neufeld and Hall,
2010), line-based chessboard detection methods have
received significant research attention (Chen et al.,
2016; Chen and Wang, 2019; Xie et al., 2018a; Tam
et al., 2008; Xie et al., 2018b; Danner and Kafafy,
2015; Mehta, 2020). Czyzewski et al. (Czyzewski
et al., 2020) introduced an approach based on itera-
tive heat map generation which visualizes the proba-
bility of a chessboard being located in a sub-region
of the image. After each iteration, the four-sided
area of the image containing the highest probabil-
ity values is cropped and the process is repeated un-
til convergence. While this method involves a great
computational overhead, it is able to detect chess-
boards from images taken from varied angles, with
poor quality, and regardless of the state of the actual
chessboard (e.g. damaged chessboard with deformed
edges), with a 99.6% detection accuracy. W
¨
olflein
and Arandjelovi
´
c (W
¨
olflein and Arandjelovi
´
c, 2021)
proposed a chessboard detection method that leverag-
ing the geometric nature of the chessboard, utilizes
a RANSAC-based algorithm to iteratively refine the
homography matrix and include all the computed in-
tersection points. Their method demonstrated impres-
sive results, since it successfully detected all of the
chessboards in their validation dataset. However, it’s
worth noting that the dataset only included images
with viewing angles within the range of a player’s
perspective. In our paper, we bypass the chessboard
detection task, allowing the deep learning models to
internally infer its position, and thus we do not rely
on user input, or specific viewing angles.
Piece Classification. Upon detection of the chess-
board, the next step the aforementioned approaches
employ is piece classification. A number of tech-
niques have been developed to address this task, either
in a 2-way approach (i.e. color and type), or 1-way by
treating each combination of piece color and type as a
separate class (e.g. “white-rook”). In Matuszek et al.
(Matuszek et al., 2011), the authors utilized one clas-
sifier to determine the piece color, and then for each
color they trained a type classifier using concatenated
scale-invariant feature transform (SIFT) and kernel
descriptors for features. A similar approach was used
in Ding (Ding, 2016), where the author employed
SIFT and histogram of oriented gradients (HOG) as
feature descriptors for piece type classification with
support vector machine (SVM) classifiers. The color
was subsequently detected by comparing the bina-
rized image of the square with that of an empty one.
Danner and Kafafy (Danner and Kafafy, 2015) and
Xie et al. (Xie et al., 2018a) argued that the lack of
distinguishable texture in small objects, such as chess
pieces, leads to insufficient features obtained using
SIFT descriptors. Both studies suggested a template
matching approach for piece classification, compar-
ing the contours of the detected pieces with reference
templates obtained from various angles. Wei et al.
(Wei et al., 2017) proposed an approach to recognize
pieces using a depth camera and a volumetric con-
volutional neural network (CNN). More recent stud-
ies (Mehta, 2020; Czyzewski et al., 2020; Quintana
et al., 2020; W
¨
olflein and Arandjelovi
´
c, 2021) fol-
low the 1-way approach for piece classification. They
train CNNs to distinguish between 12 or 13 classes
of objects (i.e. six piece types in both colors and
one for empty squares), obtaining impressive results.
In Czyzewski et al. (Czyzewski et al., 2020), they
also leverage domain knowledge, to improve piece
classification, by utilizing a chess engine to calculate
the most probable piece configurations and cluster-
ing similar figures into groups to deduce formations
based on cardinalities. Additionally, given the varia-
tion in appearance between chess sets, W
¨
olflein and
Arandjelovi
´
c (W
¨
olflein and Arandjelovi
´
c, 2021) pro-
posed a novel fine-tuning process for their piece clas-
sifier to unseen chess sets. In our paper, same as with
the chessboard detection task, the classification of the
pieces is performed by the deep learning model, with-
out the need to train a separate piece classifier.
Chess Datasets. A common problem frequently
mentioned in literature (Ding, 2016; Mehta, 2020;
Czyzewski et al., 2020; W
¨
olflein and Arandjelovi
´
c,
2021) is the lack of a comprehensive chess dataset.
This issue hinders not only the ability to fairly eval-
uate the proposed methods in a common setting but
also impedes the deployment of deep learning end-
to-end approaches that require a vast amount of data.
One proposed solution to this problem is the use of
synthetic generated data. In (Wei et al., 2017), the au-
thors produce point cloud data using a 3D computer-
aided design (CAD) model, while Blender (Com-
munity, 2018) was used to produce synthetic im-
age datasets from a top view camera angle (Neto
and Campello, 2019), or the player’s perspective
End-to-End Chess Recognition
395

(W
¨
olflein and Arandjelovi
´
c, 2021). In our paper, we
introduce the first chess recognition dataset of real im-
ages, without setting any of the aforementioned re-
strictions regarding the viewing angles.
3 CHESS RECOGNITION
DATASET (ChessReD)
The availability of large-scale annotated datasets is
critical to the advancement of computer vision re-
search. In this section, we tackle a main issue in the
field of chess recognition (i.e. the lack of a compre-
hensive dataset) by presenting a novel dataset
1
specif-
ically designed for this task. The dataset comprises a
diverse collection of photographs of chess formations
captured using smartphone cameras; a sensor choice
made to ensure real-world applicability.
Data Collection and Annotation. The dataset was
collected by capturing photographs of chessboards
with various chess piece configurations. To guaran-
tee the variability of those configurations, we relied
upon the chess opening theory. The Encyclopedia of
Chess Openings (ECO) classifies opening sequences
into five volumes with 100 subcategories each that are
uniquely identified by an ECO code. We randomly
selected 20 ECO codes from each volume. Subse-
quently, each code of this set was randomly matched
to an already played chess game that followed the par-
ticular opening sequence denoted by the ECO code;
thus creating a set of 100 chess games. Finally, using
the move-by-move information provided by Portable
Game Notations (PGNs) that are used to record chess
games, the selected games were played out on a single
physical chessboard, commonly used at chess clubs,
with images being captured after each move.
Three distinct smartphone models were used to
capture the images. Each model has different cam-
era specifications, such as resolution and sensor type,
that introduce further variability in the dataset. The
images were also taken from diverse angles, ranging
from top-view to oblique angles, and from different
perspectives (e.g. white player perspective, side view,
etc.). These conditions simulate real-world scenarios
where chessboards can be captured from a bystander’s
arbitrary point of view. Additionally, the dataset in-
cludes images captured under different lighting con-
ditions, with both natural and artificial light sources
introducing these variations. Most of these varia-
tions are illustrated in the four image samples of Fig-
ure 2. Each of those samples highlights a different
challenge in chess recognition. Occlusions between
pieces occur more often in images captured from a
low angle (Figure 2c) or a player’s perspective (Fig-
ure 2b), while pieces are rarely occluded in top-view
images (Figure 2d). However, distinct characteris-
tics of pieces (e.g. the queen’s crown) that could aid
the chess recognition task are less distinguishable in a
top-view. More samples of ChessReD can be seen in
the Appendix.
The dataset is accompanied by detailed annota-
tions providing information about the chess pieces
formation in the images. Therefore, the number of
annotations for each image depends on the number of
chess pieces depicted in it. There are 12 category ids
in total (i.e. 6 piece types per color) and the chess-
board coordinates are in the form of algebraic nota-
tion strings (e.g. “a8”). These annotations were auto-
matically extracted from Forsyth-Edwards Notations
(FENs) that were available to us by the games’ PGNs.
Each FEN string describes the state of the chessboard
after each move using algebraic notation for the piece
types (e.g. “N” is knight) , capitalization for the piece
colors (i.e. white pieces are denoted with uppercase
letters, while black pieces with lowercase letters), and
digits to denote the number of empty squares. Thus,
by matching the captured images to the corresponding
FENs, the state of the chessboard in each image was
already known and annotations could be extracted. To
further facilitate research in the chess recognition do-
main, we also provide bounding-box and chessboard
corner annotations for a subset of 20 chess games. An
annotated sample is presented in Figure 3. The dif-
ferent colors for the corner points represent the four
distinct corner annotations (i.e. bottom-left, bottom-
right, top-left, and top-right) that are relative to the
white player’s perspective. For instance, the corner
annotated with the red color in Figure 3 is a bottom-
left corner. The discrimination between these differ-
ent types of corners provides information about the
orientation of the chessboard that can be leveraged to
determine the image’s perspective and viewing angle.
Data Statistics. The dataset consists of 100 chess
games, each with an arbitrary number of moves and
therefore images, amounting to a total of 10,800 im-
ages being collected. The dataset was split into train-
ing, validation, and test sets following an 60/20/20
split. Since two consecutive images of a chess game
differ only by one move, the split was performed on
game-level to ensure that quite similar images would
not end up in different sets. The split was also strat-
ified over the three distinct smartphone cameras (Ap-
ple iPhone 12, Huawei P40 pro, Samsung Galaxy S8)
that were used to capture the images. Table 1 presents
an overview of the image statistics per smartphone.
The three smartphone cameras introduced variations
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
396
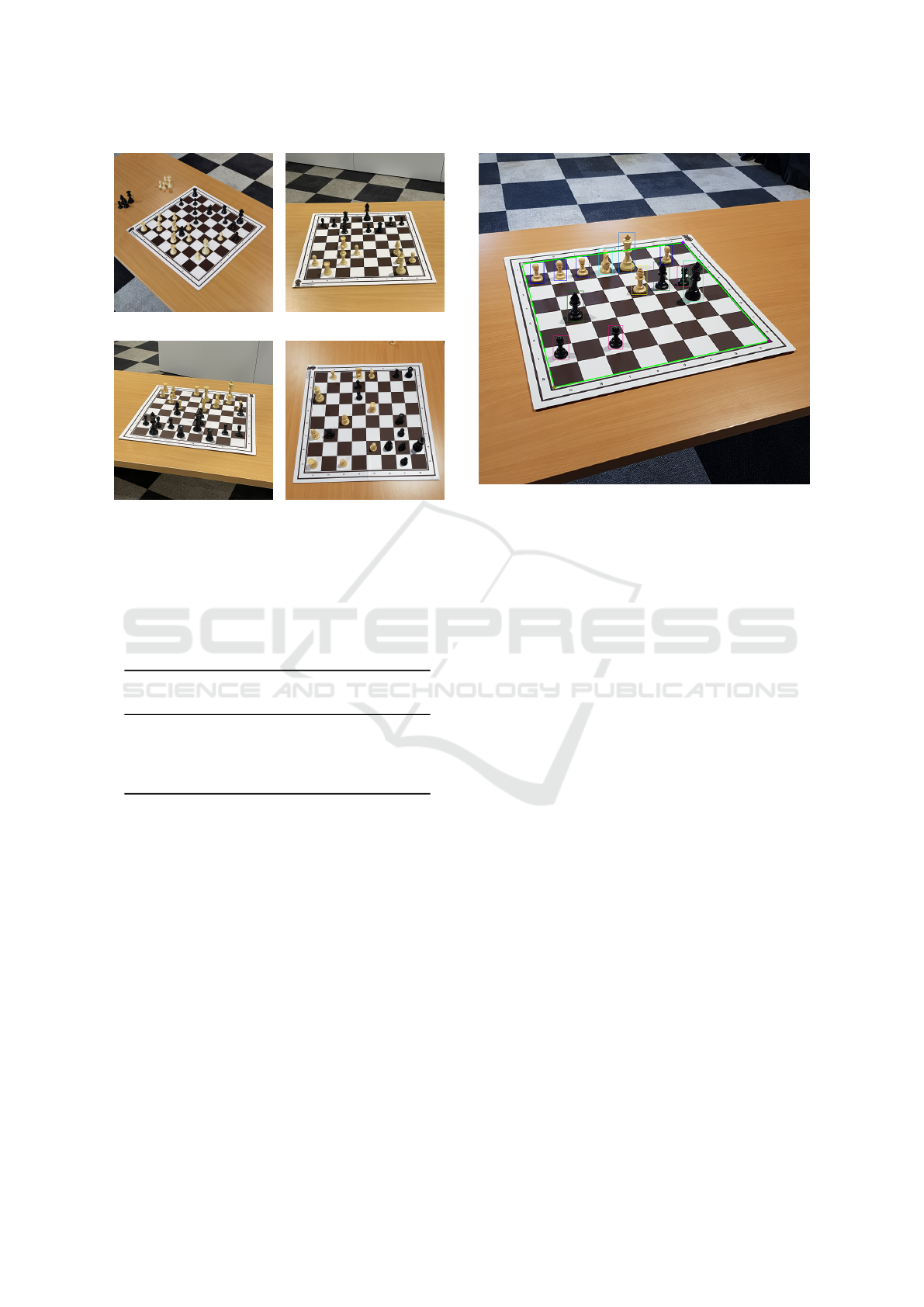
(a) Corner view (b) Player view
(c) Low angle (d) Top view
Figure 2: Image samples from ChessReD.
to the dataset based on the distinct characteristics of
their sensors. For instance, while the image resolution
for the Huawei phone was 3072x3072, the resolution
for the remaining two models was 3024x3024.
Table 1: Overview of the image statistics.
Smartphone
Number of images
Train Val Test
Apple iPhone 12 2,146 851 638
Huawei P40 pro 2,102 638 871
Samsung Galaxy S8 2,231 703 620
Total 6,479 2,192 2,129
Table 2 presents an overview of the annotations in
ChessReD. In Table 2a illustrates a significant imbal-
ance between annotations for the piece type “Pawn”
and the rest of the pieces. This was to be expected
since every chess game starts with 8 pawns in each
side and only one or two of the remaining piece types.
Regarding the colors of the pieces, no imbalance is
detected in the dataset. Additionally, while annota-
tions about the position of the pieces in algebraic no-
tation are available for every image in the dataset,
we provide bounding box and chessboard corner an-
notations only for a subset of 20 randomly selected
games (2,078 images) from the train, validation, and
test sets. For this subset we followed a 70/15/15 split
stratified over the smartphone cameras, which led to
a total of 14 training games (1442 images), 3 vali-
dation games (330 images), and 3 test games (306
images) being annotated. In Table 2b we can see an
Figure 3: Bounding box and corner point annotations in
ChessReD2K.
overview of the annotation statistics for this subset,
named ChessReD2K.
4 METHOD: END-TO-END
CHESS RECOGNITION
Unlike the conventional pipeline in chess recogni-
tion that involves separate, independent, modules of
chessboard detection, square localization, and chess
piece classification, the focus of this study was to ex-
plore an end-to-end approach that tackles the recogni-
tion task utilizing only a single image as input. Thus,
the developed method should take as input an image
of a chessboard and output the type and the positions
of the pieces relative to the board. To this end, we
experimented with two different solutions by treating
the problem either as a multi-class multi-label classi-
fication or as a relative object detection task.
Classification Approach. Here, each chessboard
square is a distinct label. Since there are 64 squares in
each image, and thus 64 labels, this problem is treated
as a multi-label classification task. Each square in the
chessboard is either unoccupied or occupied by one
of the 12 different types of pieces (i.e. 6 per color) in
chess. Therefore, to each label we assign one of 13
classes (i.e. 12 piece types and ’empty’). By formu-
lating it as multi-label multi-class classification, the
goal is for the model to learn the intricate relation-
ships and visual patterns associated with the individ-
ual squares.
End-to-End Chess Recognition
397

Table 2: Overview of the annotation statistics.
(a) Piece positions on the chessboard in ChessReD
Piece type
Number of instances
Train Val Test
Black White Black White Black White
Pawn 35,888 35,021 11,410 11,042 11,616 11,472
Rook 9,317 9,260 2,605 2,876 2,992 3,077
Knight 6,158 6,471 2,222 2,206 2,032 2,202
Bishop 6,681 6,768 2,167 2,003 2,301 2,067
Queen 4,076 3,996 1,011 1,013 1,145 1,109
King 6,479 6,479 2,192 2,192 2,129 2,129
(b) Bounding boxes in ChessReD2K
Piece type
Number of instances
Train Val Test
Black White Black White Black White
Pawn 8,059 7,653 1,511 1,625 1,719 1,624
Rook 2,293 2,250 471 447 433 433
Knight 1,276 1,423 178 274 278 278
Bishop 1,578 1,607 380 335 296 304
Queen 862 838 125 126 157 160
King 1,442 1,442 330 330 306 306
Relative Object Detection Approach. In addition
to the multi-class multi-label classification approach,
we explore a novel technique for chess recognition
which we call relative object detection. Contrary
to conventional object detection methods that predict
bounding box coordinates in terms of absolute posi-
tion in the image frame, our modified method aims to
predict the x and y coordinates of the objects relative
to the chessboard grid in the image. In this manner,
discrete coordinates that align with the chessboard po-
sitions are used to provide spatial information of its
layout. For instance, the relative position (0,0) corre-
sponds to the chessboard square denoted by “a8” in
chess algebraic notation. Furthermore, since we only
need to predict the relative coordinates, we can omit
the height and width estimation, effectively bypassing
the complexities of the bounding box size estimation.
4.1 Implementation Details
Classification. For the classification approach, we
employed a ResNeXt (Xie et al., 2017) model. Their
introduced concept of “cardinality” (i.e. the number
of parallel branches used in each residual block) both
enables deeper architectures with reduced computa-
tion complexity and allows complex representations
to be learned by aggregating the information of the
multiple branches. Because of these modifications,
this family of models can achieve impressive results
in image classification.
For our experiments, we trained the
resnext101 32d variant, which uses a cardinality
of 32 and a width (i.e. number of filters) of 8.
This means that each residual block in the network
contains 32 parallel convolutional layers, and each
of them has a width of 8. Additionally, there are
101 layers in the network, which amount to a total
of 88.8M parameters. We trained this model from
scratch for 200 epochs, with early stopping enabled
and a batch size of 8 samples, using a cross-entropy
loss function. We used an Adam (Kingma and Ba,
2014) optimizer with a learning rate of 0.001, which
was reduced to 0.0001 after the 100th epoch. The
same training recipe was used to train ResNext on all
of the datasets in our experiments (Section 5).
Relative Object Detection. As mentioned in Sec-
tion 4, the goal is to predict a set of coordinates x and
y for the chess pieces relative to the chessboard grid
in the image. Thus, traditional object detection mod-
els that use Region Proposal Networks (RPNs) (Ren
et al., 2015) or anchor boxes (Redmon et al., 2016)
are not suitable for this task, since they output abso-
lute image coordinates. However, a single end-to-end
object detection model, like Detection Transformer
(DETR) (Carion et al., 2020), that directly predicts
bounding boxes and class labels for objects in an im-
age could be employed. DETR uses a transformer
encoder-decoder architecture, with the encoder tak-
ing as input a feature map produced by a convolu-
tional backbone network and the decoder generating
the final predictions using self-attention mechanisms
to attend to different parts of the feature map.
For our experiments, we attempted to train a mod-
ified version of DETR that predicts relative object co-
ordinates and omits the height and width dimensions
for the bounding boxes of the traditional object de-
tection task. ResNext101 32d was used as a back-
bone network for feature extraction. We set the num-
ber of queries (i.e. the maximum number of objects
that DETR can detect in an image) to 32, since each
chessboard can have at most 32 chess pieces on top
of it. DETR also requires a separate class for “back-
ground”, which in our case corresponds to “empty”
squares. Thus, the number of classes that the model is
trained to predict is 13 (i.e. 12 piece types and back-
ground). We trained the model from scratch for a to-
tal of 800 epochs, with early stopping enabled and a
batch size of 8 samples, using DETR’s default bipar-
tite matching loss for set predictions, which takes into
account both the class prediction and the similarity of
the predicted and ground truth coordinates. We used
an AdamW (Loshchilov and Hutter, 2017) optimizer
with separate learning rates for the backbone network
and the encoder-decoder architecture. In particular,
the initial learning rates were set to 10
−5
and 10
−6
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
398

for the encoder-decoder and backbone, respectively,
and a scheduler was used to reduce both by a factor of
10 every 300 epochs. Furthermore, gradient clipping
was used with a threshold of 0.1.
However, the training of this modified DETR vari-
ant for chess recognition did not yield optimal results,
with the model being unable to successfully detect
chess pieces in the images of ChessReD. This issue
could potentially be linked to DETR’s inherent limi-
tation in detecting small objects (Carion et al., 2020;
Zhu et al., 2020), especially when considering the in-
tricacies of the dataset (e.g. occlusions) and the rel-
atively small sizes of individual pieces. Due to the
unsuccessful convergence of the DETR variant, it will
not be used in the experiments of Section 5. Neverthe-
less, end-to-end relative object detection with trans-
formers is a promising area that should be further in-
vestigated, with the focus being on refining the model
architecture ((Zhu et al., 2020)) or the training objec-
tive.
5 EXPERIMENTS
5.1 Exp1: Comparison with the
State-of-the-Art
To the best of our knowledge, the current state-
of-the-art approach in chess recognition, namely
Chesscog, was introduced in W
¨
olflein and Arand-
jelovi
´
c (W
¨
olflein and Arandjelovi
´
c, 2021). In
their experiments, Chesscog achieved a 93.86%
accuracy in chess recognition on a synthetic
dataset (W
¨
olflein and Arandjelovic, 2021) rendered in
Blender(Community, 2018), with a 0.23% per-square
error rate. Additionally, the authors introduced a few-
shot transfer learning approach to unseen chess sets
and the system demonstrated a 88.89% accuracy and
0.17% per-square error rate, when tested on a set of
previously unseen images of chessboards. In this sec-
tion, we will compare the performance of our ap-
proach with that of Chesscog’s, both on their Blender
dataset and on our newly introduced ChessReD.
5.1.1 Current SOTA: Chesscog
Chesscog (W
¨
olflein and Arandjelovi
´
c, 2021) does
chess recognition using a pipeline that involves chess-
board detection, square localization, occupancy clas-
sification, and piece classification. It uses the geomet-
ric nature of the chessboard to detect lines and em-
ploys a RANSAC-based algorithm to compute a pro-
jective transformation of the board onto a regular grid.
Subsequently, individual squares are localized based
on the intersection points and an occupancy classifier
is used on each individual square. Finally, the pieces
on the occupied squares are classified into one of 12
classes, using a pre-trained piece classifier. The piece
classifier is used on image patches of the squares that
are heuristically cropped by extending the bounding
boxes based on the square’s location on the chess-
board. During inference, the user must manually in-
put the specific player’s perspective (i.e. “white” or
“black”) to determine the orientation of the board.
5.1.2 Comparison to Chesscog on Their
Synthetic Blender Dataset
First, we compare and evaluate the performance of
our classification approach on Chesscog’s synthetic
Blender dataset (W
¨
olflein and Arandjelovi
´
c, 2021).
The Blender dataset comprises a set of 4,888 synthetic
chessboard images with distinct piece configurations,
multiple lighting conditions, a limited range of view-
ing angles (between 45° and 60° to the board), and
images taken only from the players’ perspectives. We
trained our ResNeXt model following the recipe de-
scribed in Section 4.1 on the dataset’s training sam-
ples. Subsequently, we evaluated our trained model’s
performance on the test set. The first two columns
of Table 3 demonstrate the evaluation results for both
approaches on the Blender dataset. We use the same
evaluation metrics as in W
¨
olflein and Arandjelovi
´
c
(W
¨
olflein and Arandjelovi
´
c, 2021).
Chesscog outperforms our classification approach
across all metrics. For the percentage of boards
with no mistakes, which reveals a model’s abil-
ity to achieve perfect board recognition, Chesscog
demonstrates a significant advantage with 93.86% of
boards correctly predicted, while ResNeXt achieves
this only in 39.76% of the boards. When one mis-
take is allowed per board prediction, Chesscog can
successfully recognize almost all of the boards, with
ResNeXt’s performance improving significantly and
reaching 65.2%. Chesscog’s superiority is also cor-
roborated by the substantially lower mean number
of incorrect squares per board (0.15 vs. 1.19 for
ResNeXt) and per-square error rate (0.23% vs. 1.86%
for ResNeXt).
5.1.3 How Does the Classification Approach
Compare to Chesscog on the Real
ChessReD Dataset?
In this section, we compare the performance of our
approach with that of Chesscog’s on our ChessReD.
We trained our ResNeXt model, using again the
recipe of Section 4.1, and finetuned the Chesscog
classifiers as mentioned in (W
¨
olflein and Arand-
End-to-End Chess Recognition
399

Table 3: Performance evaluation for Chesscog’s and our classification approach’s (ResNeXt) predictions on the corresponding
test sets. ChessReD* represents the subset of the test images in which Chesscog could detect the chessboard.
Blender Dataset ChessReD ChessReD*
Metric Chesscog ResNeXt Chesscog ResNeXt Chesscog ResNeXt
Mean incorrect squares per board 0.15 1.19 42.87 3.40 12.96 3.35
Boards with no mistakes (%) 93.86% 39.76% 2.30% 15.26% 6.69% 15.30%
Boards with ≤ 1 mistake (%) 99.71% 65.20% 7.79% 25.92% 22.67% 27.04%
Per-square error rate (%) 0.23% 1.86% 73.64% 5.31% 39.57% 5.24%
jelovi
´
c, 2021), using two images of the starting posi-
tion from both players’ perspectives. Furthermore, for
a fair comparison we needed to take into account that
Chesscog cannot infer the orientation of the chess-
board and requires for it to be manually inputted.
Since this information is not available in our dataset,
we address it by generating all possible orientations
for the detected chessboards during evaluation.
Both approaches faced increased challenges when
tested on ChessReD, resulting in a performance drop
across all metrics, as seen in Table 3. While our
ResNeXt model can still demonstrate competitive re-
sults, recognizing successfully 15.26% of boards with
no mistakes and 25.92% of boards with less than
one mistake, Chesscog’s accuracy decreases signifi-
cantly, achieving only 2.3% and 7.79% in these met-
rics, respectively. Chesscog’s performance deterio-
ration is also evident by its 42.87 incorrect squares
per board on average and the 73.65% per-square error
rate. ResNeXt’s performance for these metrics was
3.40 and 5.31%, respectively.
Upon further investigation, one important factor
that led to Chesscog’s performance degradation was
the inaccurate results of the chessboard detection pro-
cess and the accumulation of the error throughout the
pipeline. While the limited range of angles present in
the Blender dataset of the previous section enabled
Chesscog to achieve 100% accuracy in chessboard
detection, the corresponding accuracy in our dataset
is 34.38%. This issue highlights the sensitivity of
the image processing algorithms employed for chess-
board detection to their hyperparameters and the ne-
cessity to finetune them across different datasets.
To further compare the performance of both ap-
proaches, we conducted the same evaluation with-
out taking into account the failed chessboard de-
tections by Chesscog. In the last two columns of
Table 3, we evaluate the performance of both ap-
proaches on the subset of the ChessReD’s test set (de-
noted as ChessReD*) consisting of the 34.38% (732)
of the images in which Chesscog was able to de-
tect the chessboard. While Chesscog’s performance
shows significant improvement when we don’t con-
sider those erroneous chessboard detections, it re-
mains inferior in comparison to the results achieved
by our classification approach across all metrics.
5.2 Ablation: Chessboard Markings
(a) With marks (b) Without marks
Figure 4: Sample pair of images for the ablation study.
One significant advantage of our approaches is that
they do not require any further input to determine the
orientation of the chessboard in an image. Yet, the
visual cues used by the models to deduce the chess-
board’s orientation remain unclear. To this end, we
conducted an ablation study to investigate whether the
ResNeXt model relies on specific marks of the chess-
board (e.g. bishop logo in Figure 4a) which can, for
example be detected (Karaoglu et al., 2017), to subse-
quently determine the board’s orientation and recog-
nize the chess configuration.
We hypothesize that the necessity of those marks
for successful chess recognition increases with the
number of moves that have been made prior to cap-
turing the image. The intuition behind this hypoth-
esis is that in the early game of chess, the majority
of the pieces remain in their starting position, so de-
termining the boards orientation poses less of a chal-
lenge, while in the end game, only a few pieces re-
main on the board and they are usually far from their
starting position. To validate this hypothesis, we cre-
ated a dataset consisting of 30 test images that were
randomly selected from the subset of images that the
model was able to successfully recognize in the eval-
uation of Section 5.1.3. The test images were evenly
distributed across three categories: early-game, mid-
game, and end-game. These categories correspond
to images that were taken when less than 30, more
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
400

than 30 but less than 75, or more than 75 moves had
been made prior to capturing the images, respectively.
Subsequently, we manually removed the marks, such
as the bishop logo or the algebraic chess notation
on the sides, and evaluated again the performance of
ResNeXt on this subset of 30 modified images. A
sample pair of images is illustrated in Figure 4. The
model achieved an overall accuracy (i.e. boards with
no mistakes) of 66.6% on this subset, with a perfect
recognition in the early-game images, 60% accuracy
in mid-game images, and 40% accuracy in end-game
images.
6 DISCUSSION
The evaluation on the Blender dataset revealed that
Chesscog outperforms our classification approach.
However, further experimentation on our newly in-
troduced ChessReD showcased a shift in both meth-
ods’ performances, with ResNeXt surpassing Chess-
cog across all metrics. It is evident that Chesscog’s
low chessboard detection rate (34.38%), which is at-
tributed to the diverse angles and occlusions intro-
duced by our dataset, significantly contributed to that
shift, while the specific range of angles used in the
Blender dataset enabled Chesscog to successfully de-
tect the chessboard in all cases and achieve a remark-
able end-to-end performance.
The ablation study provided significant insights
into our ResNeXt model’s reliance on specific marks
for determining chessboard orientation, and therefore
chess recognition. The study confirmed our hypothe-
sis that the necessity of those marks increases with the
number of moves made prior to image capture. The
model achieved higher accuracy in early-game im-
ages, where most of the pieces remained in their start-
ing positions, and lower accuracy in end-game im-
ages, where only a few pieces were still on the board
and farther from their starting positions. While de-
pending on such marks could be challenging in cases
where they are absent or obscured, it could prove to be
an advantage in end-game states in which even human
annotators can have trouble determining the board’s
orientation without them.
6.1 Limitations
While our study sheds light on the importance of end-
to-end deep learning approaches for chess recogni-
tion, the limitations of these solutions should also be
considered. An inherent weakness of the classifica-
tion approach is its inability to recognize labels that
are absent from the dataset that it was trained on. For
instance, if a specific piece/square combination was
first seen at inference time, the model would be un-
able to assign the corresponding label. On the other
hand, the relative object detection approach would not
encounter this issue, but as a transformer-based solu-
tion it’s difficult to converge when trained on a small
dataset. Finally, finetuning these models on previ-
ously unseen data would require considerably more
resources and compute time compared to finetuning
a simple CNN piece classifier in the sequential ap-
proaches.
Regarding ChessReD, although including a sin-
gle chess set in the images was a design choice, this
lack of diversity impedes the development of solu-
tions with broader applicability. Yet, it is feasible to
enhance the dataset by collecting varied data with rel-
ative positional annotations (i.e. FEN strings instead
of bounding boxes) from chess tournaments record-
ings, where the players are obliged to annotate their
every move.
6.2 Conclusion
Our experiments demonstrate the effectiveness of our
classification approach in chess recognition tasks,
while also revealing Chesscog’s advantages on cer-
tain datasets. However, with the focus being on real-
world applicability, the ChessReD dataset, consisting
of real images with varied angles and perspectives,
poses a more challenging benchmark for chess recog-
nition, and thus the experimental results establish our
approach as the state-of-the-art method for this task.
Moving forward, improving the model’s ability to
generalize by either enhancing the dataset, or incor-
porating domain adaptation techniques, should be ex-
plored. Additionally, the relative object detection ap-
proach, if converged, may constitute a more robust
solution for chess recognition, and thus requires fur-
ther studying.
ACKNOWLEDGEMENTS
This project is supported in part by NWO (project
VI.Vidi.192.100).
REFERENCES
Banerjee, N., Saha, D., Singh, A., and Sanyal, G. (2011).
A simple autonomous robotic manipulator for play-
ing chess against any opponent in real time. In Pro-
ceedings of the International Conference on Compu-
tational Vision and Robotics.
End-to-End Chess Recognition
401

Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In European conference on
computer vision, pages 213–229. Springer.
Chen, A. T.-Y., Kevin, I., and Wang, K. (2016). Computer
vision based chess playing capabilities for the baxter
humanoid robot. In 2016 2nd International Confer-
ence on Control, Automation and Robotics (ICCAR),
pages 11–14. IEEE.
Chen, A. T.-Y. and Wang, K. I.-K. (2019). Robust computer
vision chess analysis and interaction with a humanoid
robot. Computers, 8(1):14.
Community, B. O. (2018). Blender - a 3D modelling and
rendering package. Blender Foundation, Stichting
Blender Foundation, Amsterdam.
Czyzewski, M. A., Laskowski, A., and Wasik, S. (2020).
Chessboard and chess piece recognition with the sup-
port of neural networks. Foundations of Computing
and Decision Sciences, 45(4):257–280.
Danner, C. and Kafafy, M. (2015). Visual chess recognition.
In EE 368, Spring 2015.
Ding, J. (2016). Chessvision: Chess board and piece recog-
nition. In Tech. rep. Stanford University.
Karaoglu, S., Tao, R., van Gemert, J. C., and Gevers, T.
(2017). Con-text: Text detection for fine-grained ob-
ject classification. IEEE transactions on image pro-
cessing, 26(8):3965–3980.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kołosowski, P., Wolniakowski, A., and Miatliuk, K. (2020).
Collaborative robot system for playing chess. In 2020
International Conference Mechatronic Systems and
Materials (MSM), pages 1–6. IEEE.
Koray, C., Sumer, E., Struc, V., et al. (2016). A computer
vision system for chess game tracking. In 21st Com-
puter Vision Winter Workshop, Rimske Toplice, Slove-
nia.
Loshchilov, I. and Hutter, F. (2017). Decoupled weight de-
cay regularization. arXiv preprint arXiv:1711.05101.
Matuszek, C., Mayton, B., Aimi, R., Deisenroth, M. P., Bo,
L., Chu, R., Kung, M., LeGrand, L., Smith, J. R.,
and Fox, D. (2011). Gambit: An autonomous chess-
playing robotic system. In 2011 IEEE International
Conference on Robotics and Automation, pages 4291–
4297. IEEE.
Mehta, A. (2020). Augmented reality chess analyzer
(archessanalyzer): In-device inference of physical
chess game positions through board segmentation and
piece recognition using convolutional neural network.
arXiv preprint arXiv:2009.01649.
Neto, A. d. S. D. and Campello, R. M. (2019). Chess posi-
tion identification using pieces classification based on
synthetic images generation and deep neural network
fine-tuning. In 2019 21st Symposium on Virtual and
Augmented Reality (SVR), pages 152–160. IEEE.
Neufeld, J. E. and Hall, T. S. (2010). Probabilistic location
of a populated chessboard using computer vision. In
2010 53rd IEEE International Midwest Symposium on
Circuits and Systems, pages 616–619. IEEE.
Quintana, D. M., Garc
´
ıa, A. A. d. B., and Mat
´
ıas, M. P.
(2020). Livechess2fen: A framework for classi-
fying chess pieces based on cnns. arXiv preprint
arXiv:2012.06858.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Sokic, E. and Ahic-Djokic, M. (2008). Simple computer vi-
sion system for chess playing robot manipulator as a
project-based learning example. In 2008 IEEE Inter-
national Symposium on Signal Processing and Infor-
mation Technology, pages 75–79. IEEE.
Tam, K., Lay, J., and Levy, D. (2008). Automatic grid seg-
mentation of populated chessboard taken at a lower
angle view. In 2008 Digital Image Computing: Tech-
niques and Applications, pages 294–299.
Urting, D. and Berbers, Y. (2003). Marineblue: A low-cost
chess robot. In Robotics and Applications, pages 76–
81.
Van Gemert, J. C. (2011). Exploiting photographic style for
category-level image classification by generalizing the
spatial pyramid. In Proceedings of the 1st ACM Inter-
national Conference on Multimedia Retrieval, pages
1–8.
Wang, V. and Green, R. (2013). Chess move tracking us-
ing overhead rgb webcam. In 2013 28th Interna-
tional Conference on Image and Vision Computing
New Zealand (IVCNZ 2013), pages 299–304. IEEE.
Wei, Y.-A., Huang, T.-W., Chen, H.-T., and Liu, J. (2017).
Chess recognition from a single depth image. In 2017
IEEE International Conference on Multimedia and
Expo (ICME), pages 931–936. IEEE.
W
¨
olflein, G. and Arandjelovic, O. (2021). Dataset of ren-
dered chess game state images. Open Science Frame-
work.
W
¨
olflein, G. and Arandjelovi
´
c, O. (2021). Determining
chess game state from an image. Journal of Imaging,
7(6):94.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
Xie, Y., Tang, G., and Hoff, W. (2018a). Chess piece
recognition using oriented chamfer matching with a
comparison to cnn. In 2018 IEEE Winter Conference
on Applications of Computer Vision (WACV), pages
2001–2009. IEEE.
Xie, Y., Tang, G., and Hoff, W. (2018b). Geometry-based
populated chessboard recognition. In Tenth Interna-
tional Conference on Machine Vision (ICMV 2017),
volume 10696, pages 9–13. SPIE.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J.
(2020). Deformable detr: Deformable transform-
ers for end-to-end object detection. arXiv preprint
arXiv:2010.04159.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
402
APPENDIX
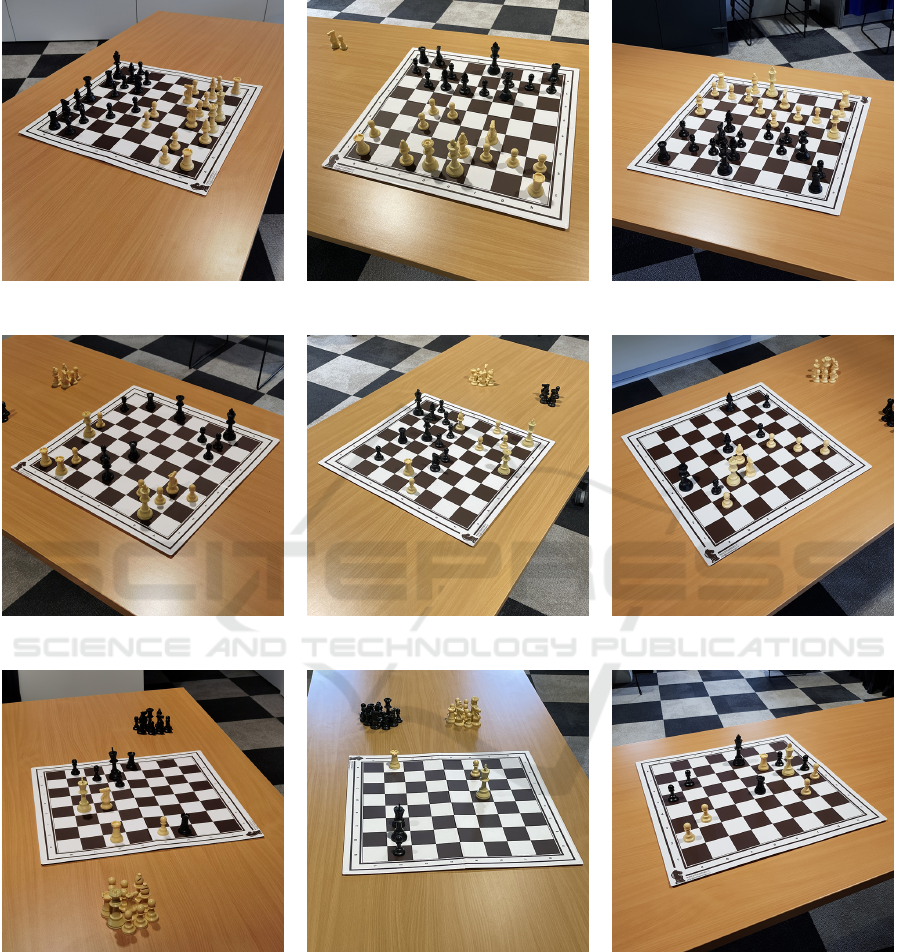
Figure 5: Early-game (less than 30 moves) samples from ChessReD.
Figure 6: Mid-game (more than 30 and less than 75 moves) samples from ChessReD.
Figure 7: End-game (more than 75 moves) samples from ChessReD.
End-to-End Chess Recognition
403
