
TrajViViT: A Trajectory Video Vision Transformer Network for
Trajectory Forecasting
Gauthier Rotsart de Hertaing
a
, Dani Manjah
b
and Benoit Macq
c
Institute of Information and Communication Technologies, Electronics and Applied Mathematics (ICTEAM), UCLouvain,
Place de l’Universit
´
e 1, 1348 Louvain-la-Neuve, Belgium
Keywords:
Vision Transformers, Transformers Networks, Noise Robustness, Trajectory Forecasting, Multi-Modality.
Abstract:
Forecasting trajectory is a complex task relying on the accuracy of past positions, a correct model of the
agent’s motion and an understanding of the social context, which are often challenging to acquire. Deep
Neural Networks (DNNs), especially Transformer networks (TFs), have recently evolved as state-of-the-art
tools in tackling these challenges. This paper presents TrajViViT (Trajectory Video Vision Transformer), a
novel multimodal Transformer Network combining images of the scene and positional information. We show
that such approach enhances the accuracy of trajectory forecasting and improves the network’s robustness
against inconsistencies and noise in positional data. Our contributions are the design and comprehensive
implementation of TrajViViT. A public Github repository will be provided.
1 INTRODUCTION
Trajectory forecasting has high-impact applications
such as autonomous vehicles for collision avoidance
(Liu et al., 2021), tumor motion prediction for effi-
cient proton-therapy (Romaguera et al., 2023; Lom-
bardo et al., 2022) or pedestrian and vehicles mo-
tion forecasting for smart-cities (Giuliari et al., 2021;
Alahi et al., 2016; Liu et al., 2023). The forecast-
ing of an agent’s (i.e., the object being tracked) future
motion relies on the agent’s past positions (i.e., ob-
ject’s center of mass) and a model of motion, which
can be challenging to obtain. More precisely, ac-
curate forecasting remains challenging due to issues
like noisy detection of past positions (Zhang et al.,
2023; Cheng et al., 2023) and the stochastic nature of
agents’ movements.
In recent years, Transformer networks (TFs)
(Vaswani et al., 2017) have shown promise in tra-
jectory forecasting. Initially, they became state-of-
the-art for sequence modelling thanks to their atten-
tion mechanism (Giuliari et al., 2021; Franco et al.,
2023; Quintanar et al., 2021). The latter leads the
network to look at all available observations and to
estimate which part of the input trajectory to focus
a
https://orcid.org/0009-0003-3753-177X
b
https://orcid.org/0000-0001-9034-0794
c
https://orcid.org/0000-0002-7243-4778
on, in contrast to Long Short-Term Memory (LSTM)
networks (Hochreiter and Schmidhuber, 1997), which
process the past observations sequentially before pre-
dicting the future trajectory auto-regressively. Conse-
quently, these networks have a greater ability to deal
with missing data, thus capturing the non-linear dy-
namics of agents more effectively.
However, existing models (Giuliari et al., 2021)
operate on the assumption of perfect detection of
agents’ past positions and primarily focus on encod-
ing past observations, leaving room for improvement
in real-world applicability and noise robustness. Our
work claims that combining positional and semantic
information in the input of the transformer network
results in more noise-robust networks, as has been
previously demonstrated in LSTM-based models such
as Social-BiGAT and Trajectron++ (Kosaraju et al.,
2019; Salzmann et al., 2020).
Our work proposes TrajViViT, a TRAJectory
VIdeo VIsion Transformer network, for trajectory
forecasting. The main contributions are:
• TrajViViT. Implementation of a multimodal
Video Vision Transformer network for robust tra-
jectory forecasting.
• Noise Robustness. Evaluation of the noise ro-
bustness of Transformer networks for trajectory
forecasting over various prediction horizon sizes.
• A code to reproduce the experiments and utilize
Rotsart de Hertaing, G., Manjah, D. and Macq, B.
TrajViViT: A Trajectory Video Vision Transformer Network for Trajectory Forecasting.
DOI: 10.5220/0012372000003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 753-760
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
753

the framework will be available at
https://github.com/GauthierRotsart/TrajViViT.
2 STATE-OF-THE-ART
Many works have been done on trajectory forecasting
during the last decades. Initially, traditional predic-
tors were based on linear, gaussian or Kalman filter
(Kalman, 1960) methods. With the growth of deep
learning, novel approach were developed based on
Artificial Neural Network. Trajectory forecasting has
been surveyed by (Huang et al., 2022a) in the context
of autonomous vehicles. Therefore, in this paper, we
will only review the state-of-the-art with transformer-
based techniques.
2.1 Computational Time-Series
Trackers
The earliest work on tracking can be traced back to the
development of radar technology during World War II
where they were used to detect and track the positions
of enemy aircraft and ships (Norbert, 1949). In the
1960s, Rudolf Kalman extended (Norbert, 1949) by
adding a system state model (e.g., physical law of mo-
tion) to sequential state measurements, such as from
sensors. The Kalman Filter (KF) (Kalman, 1960) is
a recursive algorithm and MSE-optimal estimator for
linear system driven by white Gaussian and uncorre-
lated noise. KF cannot process images as inputs and
has to rely on image processing techniques detecting
the object and providing the coordinates of the bound-
ing box (Bewley et al., 2016). Moreover, KF is un-
able to integrate social context and demands a motion
model, which can be challenging to procure and may
necessitate tuning upon new scenes. Yet, it remains in
the state-of-the-art as it provides explainable results
and is computationally low-cost algorithm.
2.2 Transformer-Based Tracker
Nowadays, transformer networks (TF) are consid-
ered as a state-of-the-art technique in trajectory fore-
casting. The work of (Giuliari et al., 2021) is the
first one using transformers to predict agent’s mo-
tion and reached the best score on the TrajNet dataset
(Sadeghian et al., 2018). Although a lot of works pro-
pose to model the social interactions between agents,
TF’s are simple models because only the positional
information is feed into the network. The work of
(Franco et al., 2023) extends (Giuliari et al., 2021)
by providing a better study of transformers models in
trajectory forecasting. They showed the superiority
of TF with respect to LSTM (Hochreiter and Schmid-
huber, 1997) whatever the forecasting horizon. How-
ever, even if the attention mechanism in TF is more
effective than the memory mechanism in LSTM, tech-
niques using social context and semantic maps are
still challenging transformers (Kosaraju et al., 2019;
Salzmann et al., 2020). Finally, (Yao et al., 2022) im-
proves (Giuliari et al., 2021) by adding random devi-
ation in the decoder’s input.
Traditionally, trajectory forecasting is formulated
as a Deterministic Trajectory Prediction (DTP) task
where the predictor is expected to provide only one
trajectory, usually the one minimising the L
2
dis-
tance with respect to the ground truth (Huang et al.,
2023). However, agent’s trajectories are generally
multi-modal and multiple plausible paths are socially
acceptable. For example, there are usually several fu-
ture possible trajectories for a car at a roundabout and
a model cannot be perfectly sure which one is going to
be the most plausible one. Hence, (Gupta et al., 2018)
formulated the trajectory forecasting problem as a
Multi-modal Trajectory Prediction (MTP) task. This
has been surveyed by (Huang et al., 2023). Works
such as (Liu et al., 2021; Shi et al., 2022; Huang et al.,
2022b; Geng et al., 2023) use transformer networks
to predict multi-modal predictions. In the MTP for-
mulation, model’s performances are usually measured
by taking the minimum error between the K plausible
predicted trajectories and the ground truth. However,
in situations such as video surveillance, there is a need
to regress only one future trajectory because the MTP
formulation only provides an upper-bound reachable.
In that way, we developed TrajViViT, a transformer-
based network that uses positional and semantic infor-
mation to predict trajectories in a deterministic way.
3 PROBLEM FORMULATION
We assume the camera images are preprocessed by
a detector such as YOLO (Redmon et al., 2016) or
a human, leading to noisy ground truth positions.
Then, based on the raw images (i.e., the social and
semantic information) as well as the agent’s past posi-
tions, a transformer-based predictor is trained to pre-
dict the future agent’s positions. More formally, given
an observation window T
obs
of the agent’s positions
X
obs
= {u
t
∈ R
2
and v
t
∈ R
224×224
|t ∈ [0,T
obs
− 1]},
the model predicts the future agent’s positions X
pred
=
{x
t
∈ R
2
|t ∈ [T
obs
,T
pred
+ T
obs
− 1]}.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
754

3.1 Transformer Network
Transformer network (Vaswani et al., 2017) is a
promising neural network in sequence modelling and
its success comes from the use of the attention mecha-
nism which estimates what are the most useful part of
the input sequence. The network is divided into two
parts: an encoder, to encode the input sequence, and a
decoder to process auto-regressively the predicted se-
quence. The input sequence X
obs
is first encoded into
the embedding space of dimension D through a linear
projection layer: E
obs
= x
T
t
W
x
where W
x
is a matrix
of weights. Although the attention module enables to
capture the input sequence non-linearities, this mech-
anism is position invariant. Therefore, time is en-
coded through a ”positional encoding layer” as de-
fined in (Vaswani et al., 2017). This encoding vector p
has the same dimension than the latent space. Hence,
at time t, the input is encoded as ε
t
obs
= E
t
obs
+ p
t
and
processed by the encoder. Finally, the decoder uses
the encoder’s output to predict auto-regressively the
output sequence.
4 MATERIALS AND METHODS
In this work, images come from the Stanford Drone
Dataset and targets are annotated with bounding
boxes (Robicquet et al., 2016). Position information
corresponds to the center of mass of the bbox. Dur-
ing inference, random noise is added on the positional
data. We then evaluate the robustness to noise of the
transformer network depending on the input modality.
In that way, three transformer-based architectures are
developed as depicted on Figure 1.
TRANSFORMER
ENCODER
Input embedding
Input (Images and
position)
Spatio-temporal
positional encoding
TRANSFORMER
DECODER
Output embedding
Temporal positional
encoding
Outputs
(shifted right)
Trajectory forecasting
(x, y, z)
Figure 1: TrajViViT’s network is built on a vanilla trans-
former network (Vaswani et al., 2017). The input is the
semantic map and the positional information.
4.1 Implementation Details
The network is trained from scratch and weights
are initialised using the Xavier Glorot’s initialisation
(Glorot and Bengio, 2010). A stochastic gradient de-
scent (SGD) with Adam optimizer (Kingma and Ba,
2014) is used for the training and we arbitrarily chose
100 epochs. The batch size is equal to 4 and a constant
learning rate of 5.10
−5
is used, without scheduling or
warm-up. Images coming from SDD contain multiple
objects and networks are deterministic. Therefore, we
indicate which agent to follow by coloring the bbox
in black. The coloured images are then fed to the net-
work which has to predict the future trajectory of the
chosen agent. Those contain all the semantic infor-
mation of the scene and images are reduced to a size
of 224 × 224. While in (Dosovitskiy et al., 2020) the
images are first split into patches and then encoded
into an embedding space, we use three 3D convolu-
tional layers to encode the spatio-temporal informa-
tion. The latent space is 16. As in (Giuliari et al.,
2021), a linear projection layer is used to embed posi-
tional information into a latent space of 16. Then, po-
sitional and semantic information are concatenated. A
vanilla transformer architecture (Vaswani et al., 2017)
is then used with 4 attention heads. The encoder and
the decoder have 6 layers. All the process is seeded
for reproducibility reasons
1
.
4.2 Training Process
The training dataset is composed of N tracks, each
containing P
n
data points. The method consists of
drawing positions randomly among all the tracks in
order to create batches with more variability (i.e,
pedestrian’s track and biker’s track inside the batch).
Moreover, the network is trained using teacher forc-
ing. Since the transformer is composed of an en-
coder, it could lead to leakages during inference be-
cause the network gets future information when up-
dating weights. However, it saves a lot of time during
training.
4.3 Evaluation Process
The detection of an agent in an image is challeng-
ing. For instance, an image-based object detector
may be subject to domain-shift, domain-drift or oc-
clusion. Alternatively, a radar has a range resolution
of several tens of centimetres and is unable to distin-
guish metal objects that are too close. Consequently,
methods cannot assume perfect observations. There-
fore, while the network is trained using the ground
truth information, TrajViViT is evaluated on differ-
ent noise levels and different scenes. Those represent
localisation errors in coordinates (u, v). In that way,
the robustness to noise and the generalisation of the
1
Supplementary materials for results reproducibility via
the Github repository.
TrajViViT: A Trajectory Video Vision Transformer Network for Trajectory Forecasting
755

network are evaluated. Noise is modelled as Addi-
tive White Gaussian Noise (AWGN) distributed with
e
u
,e
v
∼ N (µ = 0, σ
2
) where σ
2
∈ [0,20] by step of 5.
4.4 Dataset
The training dataset contains 90 % of all the avail-
able tracks of the scene. The validation and test
datasets are both equal to 5 % of the remaining
tracks. We evaluated the three transformers net-
works over the Stanford Drone Dataset (SDD) (Ro-
bicquet et al., 2016), more specifically on four differ-
ent scenes (bookstore, coupa, little and nexus). A total
of twenty-seven cameras were used for the compari-
son, each camera constituting a single dataset. Then,
TrajViViT is evaluated on three remaining scenes
(gates, hyang and deadcircles). Those include around
1,250 (1 million data points) and 2,000 different tra-
jectories (two million data points) for gates and hyang
respectively. The deadcircle scene is composed of a
bit less than 3,000 trajectories (more than 2 million
data points). The quad scene is rejected from the test
because it contains not enough trajectories and data
points.
4.5 Evaluation Metrics
As in prior works (Ivanovic and Pavone, 2019; Salz-
mann et al., 2020; Giuliari et al., 2021; Franco
et al., 2023), we use the Average Displacement Er-
ror (ADE), equivalently Mean Average Displacement
(MAD) and the Final Displacement Error (FDE),
equivalently Final Average Displacement (FAD), to
evaluate the networks performances:
ADE =
∑
T
pred
+T
obs
−1
i=t
obs
(u
i
− ˆu
i
)
2
+ (v
i
− ˆv
i
)
2
T
pred
(1)
FDE = (u
t
end
− ˆu
t
end
)
2
+ (v
t
end
− ˆv
t
end
)
2
(2)
where (u
i
,v
i
) are the predicted position in the pixel
space at the horizon i and ( ˆu
i
, ˆv
i
) the respective ground
truth position. The timestamp t
end
corresponds to the
last one.
The lower the ADE/FDE, the better the perfo-
mances. We chose to assess networks by using the
average of the two metrics.
5 RESULTS
The evaluation protocol of (Alahi et al., 2016) is
adopted: each track is sampled at 0.4s (2.5 fps) so
that the network observes 8 inputs and predicts 12
outputs. First, networks are trained and tested on the
same scene, leading to scene-specific models. Per-
formances are measured with ADE and FDE and the
Mean Square Error (MSE) is analysed over the fore-
casting horizon. We then analyse the robustness to
noise of the proposed TrajViViT network. Finally,
models are tested on three specific scenes, enabling
to assess their generalisation performances on unseen
scenes.
5.1 Multimodal TrajViViT
Our first experiment compares the performance of
each modality (image or position) and their fusion
(image and position). They were evaluated on twenty-
five videos coming from 4 domains - coupa, little,
bookstore and nexus. Each network is trained on
90% of the available tracks. The 10% remaining
tracks are used to validate (5%) and test (5%). We
denote by Img, Pos or Img+Pos the input modality
when networks are trained and tested on the same
scene. Additionally, we evaluated the contribution of
each modality when TrajViViT is trained on all the
videos of a scene, keeping the same split for the train-
ing/validation/test dataset for each video. Those are
denoted by Img multi, Pos multi and Img+Pos multi,
depending on the input modality. The analysis of
Table 1 shows an improvement of the performances
when the network uses both modalities, regardless of
the number of training data. It results in more accu-
rate trajectories over time and the prediction is better
at large horizon.
5.2 Forecasting Horizon and Noisy
Measures
In this section, we consider the forecasting perfor-
mances along the prediction horizon. First, Figure 2
shows the MSE evolution. Since models are tested
auto-regressively, the error propagates over time and
predictions get worse. We show the use of two modal-
ities reduces MSE. This is especially true when mod-
els are trained over all the available videos of the
scene.
Although trajectory forecasting using transformer
networks was already studied in (Giuliari et al., 2021;
Franco et al., 2023; Quintanar et al., 2021; Liu et al.,
2021; Liu et al., 2023), these works do not take into
account the noise in the agent’s past positions, which
could lead to a drop of performance during inference.
Comparison with respect to the noise’s variance is de-
picted on Figure 3 and notations of Table 1 are used.
Performances are represented as the average of ADE
and FDE at a noise level σ. Lower is the average,
better are the performances. Networks img and img
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
756
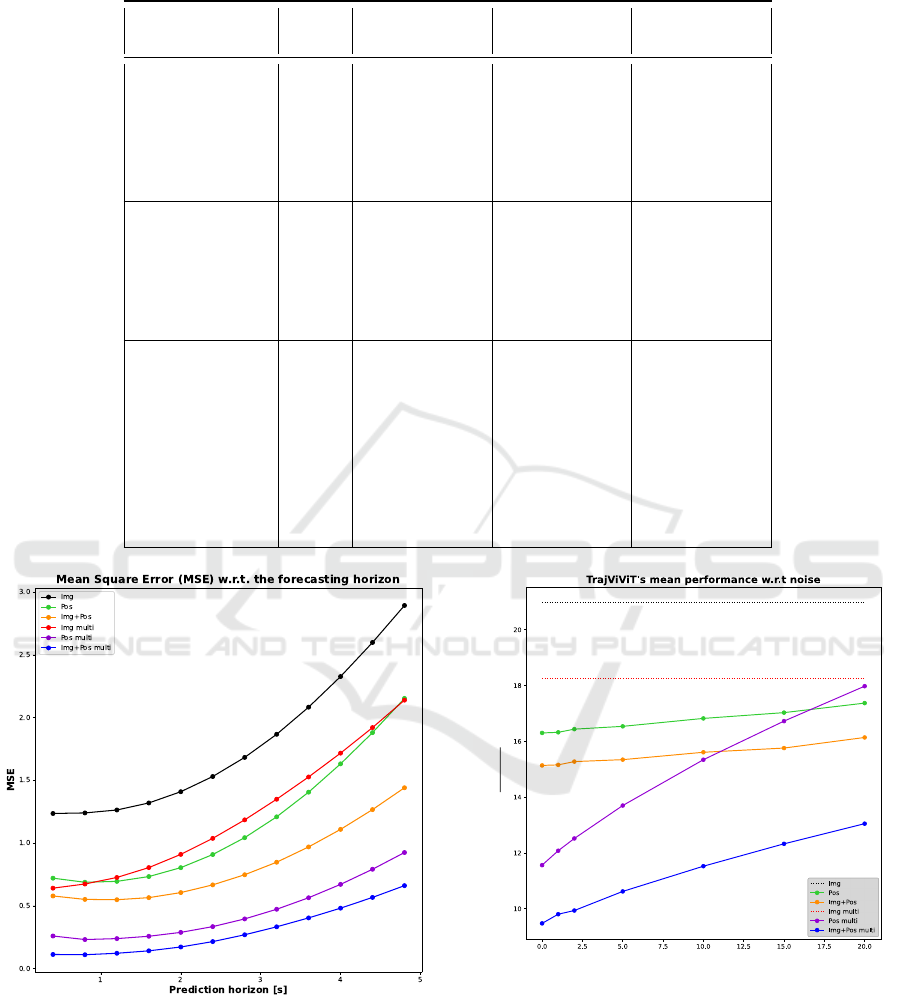
Table 1: The contribution of each modality is shown on the Table. Networks are trained and tested on the same scene. In
average, results show the combination of the semantic and positional information gives the best performances.
Domain name Video Img Pos Img + Pos
ADE/FDE ADE/FDE ADE/FDE
0 19,67/22, 30 16,51/20, 61 17,20/22, 20
1 17,21/22, 46 22,32/23, 67 12,98/15, 06
coupa 2 18,57/28, 13 19,14/29, 60 15,64/21, 26
3 16,04/18, 80 11,82/14, 42 9,82/12, 68
ALL 13,92/18, 64 7,45/12, 16 5,52/8,86
AVG coupa 17,87/22, 92 17,45/22, 08 13,91/17,80
0 18,27/23, 10 17,08/23, 45 21,94/28, 52
1 17,08/27, 10 14,52/27, 10 11,50/19, 78
little 2 40,61/48, 10 17,58/27, 02 14,67/22, 13
3 14,99/22, 48 13,42/18, 55 12,50/16, 40
ALL 21,94/29, 43 13,74/18, 92 11,09/16,79
AVG little 22,74/30, 20 15,65/19,22 15,15/21,71
0 12,54/17, 52 11,45/17, 53 10,04/13, 54
1 12,22/16, 01 7,15/10, 88 10,00/11, 19
2 14,59/21, 93 11,83/20, 08 10,74/16, 61
3 11,31/16, 89 15,71/21, 42 12,48/16, 02
bookstore 4 14,81/22, 13 16,34/21, 64 14,92/18, 42
5 9,06/13, 01 14,76/18, 50 10,25/11, 28
6 33,13/38, 70 18,81/26, 59 8,84/15, 44
ALL 10,56/14, 94 6,34/10, 76 5,42/9,14
AVG bookstore 15, 38/20,88 13, 72/19,52 10,04/14,64
Figure 2: The evolution of the MSE of TrajViViT is de-
picted with respect to the input modality. The figure shows
the combination of the two input modalities improves the
performances at larger horizon.
multi are considered as baselines because they are not
affected by noise. Figure 3 shows that multimodality
significantly improves robustness to noise.
𝐀𝐃𝐄
+ 𝐅𝐃𝐄
𝟐
Noise variance
Figure 3: Evaluation of TrajViViT at different noise levels.
Networks trained with the image modality are considered as
the baseline.
5.3 Generalisation
Finally, we evaluate the generalisation performances
of TrajViViT when trained and tested on different do-
mains. Since Figures 2 and 3 show that the more
training data there is, the better the performance, we
TrajViViT: A Trajectory Video Vision Transformer Network for Trajectory Forecasting
757
Table 2: The table shows the generalisation of TrajViViT on three scenes, each containing million of data points. In average,
results show the combination of the semantic and positional information gives the best performances.
Domain name Modality Gates Hyang Deadcircle
ADE/FDE ADE/FDE ADE/FDE
img 75,80/78, 06 74,48/75, 05 76,11/78, 10
coupa pos 10,66/17, 45 7,88/11, 96 10,03/16, 06
img+pos 8,65/15, 38 6,19/9, 75 8, 20/14,02
img 77,50/80, 59 69,74/73, 02 59,36/63, 40
little pos 15,09/20, 16 12,05/14, 58 13,73/18, 35
img+pos 13,41/20,19 14,66/21,38 11,48/16,56
img 87,87/89, 05 71,69/71, 23 76,37/78, 21
bookstore pos 7,75/14, 05 5,50/9, 21 7, 29/13,57
img+pos 8,27/15, 03 5,97/10, 74 8,41/14, 73
img 80,39/82, 57 71,97/73, 10 70,61/73, 24
AVG pos 11,17/17, 22 8,48/11,92 10,35/15, 99
img+pos 10,11/16,87 8,94/13, 96 9,36/15,10
Table 3: Cross-domain performances of models. The results highlight that combining positional and image inputs increases
networks transferability in average.
Domain Modality Coupa Little Bookstore Nexus AVG
ADE / FDE ADE / FDE ADE / FDE ADE / FDE ADE / FDE
coupa Img 13.74 / 18.50 79.33 / 82.58 87.06 / 88.89 58.85 / 61.22 59.74 / 62.80
Pos 7.33 / 12.09 13.49 / 23.02 8.90 / 14.44 8.44 / 12.80 9.54 / 15.59
Img+Pos 5.55 / 8.90 11.90 / 20.96 7.45 / 12.58 5.85 / 9.72 7.68 / 13.04
little Img 101.60 / 105.10 21.90 / 29.45 85.94 / 86.72 59.20 / 62.83 67.16 / 71.02
Pos 13.14 / 17.25 13.74 / 18.97 19.73 / 23.41 10.25 / 14.54 14.21 / 18.54
Img+Pos 15.09 / 18.74 11.05 / 16.82 15.80 / 20.27 9.69 / 14.72 12.91 / 17.64
book- Img 123.51 / 125.63 92.90 / 97.90 11.15 / 15.50 74.70 / 78.02 52.34 / 79.26
store Pos 5.83 / 10.14 9.55 / 17.96 6.42 / 10.79 4.76 / 8.08 6.64 / 11.74
Img+Pos 6.73 / 11.71 10.98 / 20.55 5.41 / 9.12 5.95 / 10.25 7.27 / 12.91
AVG Img 79.62 / 83.08 64.71 / 69.98 61.38 / 63.70 64.25 / 67.36 59.75 / 71.03
Pos 8.77 / 13.16 12.26 / 19.98 11.68 / 16.21 7.82 / 11.81 10.13 / 15.29
Img+Pos 9.12 / 13.12 11.31 / 19.44 9.55 / 13.99 7.16 / 11.50 9.29 / 14.53
only use networks trained on a whole scene. Ta-
ble 2 shows the generalisation performances on three
scenes (gates, hyang, deadcircle) where models are
tested on all the available tracks. The combination of
the modalities results in an improvement of the per-
formances.
6 DISCUSSION
First of all, Figure 3 shows that TrajViViT is under-
fitted when only trained on the image modality. This
results in high MSE over the prediction horizon and
this is surely due to the fact that input and output data
do not belong to the same domain, leading to a too
complex task. However, combining the positional and
semantic information gives the best performances and
shows robustness to noise. We can also notice that
training on all the videos of a scene gives a bigger im-
provement when combining both modalities. There-
fore, we think giving more training data enables Traj-
ViViT to use better the semantic information.
6.1 Scene-Specific Models
Table 1 shows the performances of TrajViViT when
trained and tested on the same domain. The multi-
modal network always gives the best performances,
except when training on a single video on the lit-
tle scene. This comes to its poor performances on
video 0. Therefore, this is represented by a lower
MSE, ADE and FDE over the forecasting horizon.
Moreover, as shown on Figure 3, the multi-modality
shows robustness to noise for both the ADE and FDE.
This results in improvements with respect to models
trained only with the positional information.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
758

6.2 Generalisation to Other Domains
In this section, we only consider models trained on a
whole scene, due to their superior performances. Ta-
ble 3 shows the drop of performances when training
and testing on the same domain or not. As we can see,
the network trained only with the semantic modality
has poor generalisation performances. However, on
average, the multimodal TrajViViT network gives the
best performances both in ADE and FDE. This results
in more accurate predicted trajectories at larger hori-
zon.
6.3 Limitations
Firstly, TrajViVit has only been tested on SDD data
for single-object forecasting in a 2-D context. Con-
sequently, extending it to multi-object tracking and
adapting it to depth-presenting images, such as video-
surveillance (Naphade et al., 2021) and tumor track-
ing, is not straightforward and constitutes a future
research direction. Secondly, the computational re-
sources required for both training and data can hinder
application deployment. To mitigate costs, deploy-
ment strategies based on active learning and knowl-
edge distillation, as presented in (Manjah et al., 2023),
could reduce the training complexity and data needs
of Transformers while ensuring domain adaptation.
7 CONCLUSIONS
In this paper, we proposed TrajViViT, a Trajectory
Video Vision Transformer network, for trajectory
forecasting. We showed the improvement of perfor-
mances when combining semantic and positional in-
formation, with respect to transformer networks only
trained with the agent’s past positions. In particular,
we have shown the mean square error was the lowest
during the forecasting horizon. Moreover, we showed
the robustness of the multimodal TrajViViT with re-
spect to noise. Finally, the network was tested on
a dataset containing thousands of different trajecto-
ries (millions of data points) and the contribution of
each modality (semantic and/or positional informa-
tion) was assessed. The combination of the modali-
ties results in an improvement in the generalisation of
the network.
ACKNOWLEDGEMENTS
Gauthier Rotsart de Hertaing and Dani Manjah are
respectively supported by the Walloon region un-
der grant n°2010235 – ARIAC by DIGITALWAL-
LONIA4.AI and grant n°2010149 - ARIES. We also
wish to give a special thanks to the OpenHub team
of UCLouvain for the use of their computational re-
sources that have contributed to the results presented
in this paper.
REFERENCES
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-
Fei, L., and Savarese, S. (2016). Social lstm: Human
trajectory prediction in crowded spaces. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 961–971.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE International Conference on Image Processing
(ICIP), pages 3464–3468.
Cheng, H., Chen, L., et al. (2023). An end-to-end
framework of road user detection, tracking, and pre-
diction from monocular images. arXiv preprint
arXiv:2308.05026.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Franco, L., Placidi, L., Giuliari, F., Hasan, I., Cristani, M.,
and Galasso, F. (2023). Under the hood of transformer
networks for trajectory forecasting. Pattern Recogni-
tion, 138:109372.
Geng, M., Cai, Z., Zhu, Y., Chen, X., and Lee, D.-H. (2023).
Multimodal vehicular trajectory prediction with in-
verse reinforcement learning and risk aversion at ur-
ban unsignalized intersections. IEEE Transactions on
Intelligent Transportation Systems.
Giuliari, F., Hasan, I., Cristani, M., and Galasso, F. (2021).
Transformer networks for trajectory forecasting. In
2020 25th international conference on pattern recog-
nition (ICPR), pages 10335–10342. IEEE.
Glorot, X. and Bengio, Y. (2010). Understanding the diffi-
culty of training deep feedforward neural networks. In
Proceedings of the thirteenth international conference
on artificial intelligence and statistics, pages 249–
256. JMLR Workshop and Conference Proceedings.
Gupta, A., Johnson, J., Fei-Fei, L., Savarese, S., and Alahi,
A. (2018). Social gan: Socially acceptable trajectories
with generative adversarial networks. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 2255–2264.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Huang, R., Xue, H., Pagnucco, M., Salim, F., and Song, Y.
(2023). Multimodal trajectory prediction: A survey.
arXiv preprint arXiv:2302.10463.
Huang, Y., Du, J., Yang, Z., Zhou, Z., Zhang, L., and Chen,
H. (2022a). A survey on trajectory-prediction meth-
TrajViViT: A Trajectory Video Vision Transformer Network for Trajectory Forecasting
759

ods for autonomous driving. IEEE Transactions on
Intelligent Vehicles, 7(3):652–674.
Huang, Z., Mo, X., and Lv, C. (2022b). Multi-modal mo-
tion prediction with transformer-based neural network
for autonomous driving. In 2022 International Con-
ference on Robotics and Automation (ICRA), pages
2605–2611. IEEE.
Ivanovic, B. and Pavone, M. (2019). The trajectron:
Probabilistic multi-agent trajectory modeling with dy-
namic spatiotemporal graphs. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 2375–2384.
Kalman, R. E. (1960). A New Approach to Linear Filtering
and Prediction Problems. Journal of Basic Engineer-
ing, 82(1):35–45.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kosaraju, V., Sadeghian, A., Mart
´
ın-Mart
´
ın, R., Reid, I.,
Rezatofighi, H., and Savarese, S. (2019). Social-bigat:
Multimodal trajectory forecasting using bicycle-gan
and graph attention networks. Advances in Neural In-
formation Processing Systems, 32.
Liu, D., Li, Q., Li, S., Kong, J., and Qi, M. (2023).
Non-autoregressive sparse transformer networks for
pedestrian trajectory prediction. Applied Sciences,
13(5):3296.
Liu, Y., Zhang, J., Fang, L., Jiang, Q., and Zhou, B.
(2021). Multimodal motion prediction with stacked
transformers. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 7577–7586.
Lombardo, E., Rabe, M., Xiong, Y., Nierer, L., Cusumano,
D., Placidi, L., Boldrini, L., Corradini, S., Niyazi,
M., Belka, C., et al. (2022). Offline and online
lstm networks for respiratory motion prediction in mr-
guided radiotherapy. Physics in Medicine & Biology,
67(9):095006.
Manjah, D., Cacciarelli, D., Standaert, B., Benkedadra,
M., de Hertaing, G. R., Macq, B., Galland, S., and
De Vleeschouwer, C. (2023). Stream-based active dis-
tillation for scalable model deployment. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 4998–5006.
Naphade, M., Wang, S., Anastasiu, D. C., Tang, Z., Chang,
M.-C., Yang, X., Yao, Y., Zheng, L., Chakraborty, P.,
Lopez, C. E., Sharma, A., Feng, Q., Ablavsky, V., and
Sclaroff, S. (2021). The 5th ai city challenge. In
The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR) Workshops.
Norbert, W. (1949). Extrapolation, interpolation, and
smoothing of stationary time series: with engineer-
ing applications, volume 113. MIT press Cambridge,
MA.
Quintanar, A., Fern
´
andez-Llorca, D., Parra, I., Izquierdo,
R., and Sotelo, M. (2021). Predicting vehicles trajec-
tories in urban scenarios with transformer networks
and augmented information. In 2021 IEEE Intelligent
Vehicles Symposium (IV), pages 1051–1056. IEEE.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Robicquet, A., Sadeghian, A., Alahi, A., and Savarese,
S. (2016). Learning social etiquette: Human trajec-
tory understanding in crowded scenes. In Computer
Vision–ECCV 2016: 14th European Conference, Am-
sterdam, The Netherlands, October 11-14, 2016, Pro-
ceedings, Part VIII 14, pages 549–565. Springer.
Romaguera, L. V., Alley, S., Carrier, J.-F., and Kadoury, S.
(2023). Conditional-based transformer network with
learnable queries for 4d deformation forecasting and
tracking. IEEE Transactions on Medical Imaging.
Sadeghian, A., Kosaraju, V., Gupta, A., Savarese, S., and
Alahi, A. (2018). Trajnet: Towards a benchmark for
human trajectory prediction. arXiv preprint.
Salzmann, T., Ivanovic, B., Chakravarty, P., and Pavone,
M. (2020). Trajectron++: Dynamically-feasible tra-
jectory forecasting with heterogeneous data. In Com-
puter Vision–ECCV 2020: 16th European Confer-
ence, Glasgow, UK, August 23–28, 2020, Proceed-
ings, Part XVIII 16, pages 683–700. Springer.
Shi, S., Jiang, L., Dai, D., and Schiele, B. (2022). Mo-
tion transformer with global intention localization and
local movement refinement. Advances in Neural In-
formation Processing Systems, 35:6531–6543.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Yao, H.-Y., Wan, W.-G., and Li, X. (2022). End-
to-end pedestrian trajectory forecasting with trans-
former network. ISPRS International Journal of Geo-
Information, 11(1):44.
Zhang, P., Bai, L., Wang, Y., Fang, J., Xue, J., Zheng, N.,
and Ouyang, W. (2023). Towards trajectory forecast-
ing from detection. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
760
