
Explainability Insights to Cellular Simultaneous Recurrent Neural
Networks for Classical Planning
Michaela Urbanovsk
´
a and Anton
´
ın Komenda
Department of Computer Science (DCS), Faculty of Electrical Engineering (FEE), Czech Technical University in Prague
(CTU), Karlovo n
´
am
ˇ
est
´
ı 293/13, 120 00 Prague, Czech Republic
Keywords:
Classical Planning, Cellular Simultaneous Recurrent Neural Networks, Semantically Layered Representation,
Learning Heuristic Functions.
Abstract:
The connection between symbolic artificial intelligence and statistical machine learning has been explored
in many ways. That includes using machine learning to learn new heuristic functions for navigating classi-
cal planning algorithms. Many approaches which target this task use different problem representations and
different machine learning techniques to train estimators for navigating search algorithms to find sequential so-
lutions to deterministic problems. In this work, we focus on one of these approaches which is the semantically
layered Cellular Simultaneous Neural Network architecture (slCSRN) (Urbanovsk
´
a and Komenda, 2023) used
to learn heuristic for grid-based planning problems represented by the semantically layered representation. We
create new problem domains for this architecture - the Tetris and Rush-Hour domains. Both do not have an
explicit agent that only modifies its surroundings unlike already explored problem domains. We compare the
performance of the trained slCSRN to the existing classical planning heuristics and we also provide insights
into the slCSRN computation as we provide explainability analysis of the learned heuristic functions.
1 INTRODUCTION
Classical planning is a field of symbolic Artificial in-
telligence that focuses on general problem-solving.
Its connection to statistical machine learning has been
explored in many different directions. Planning prob-
lems are often represented by a standardized language
PDDL (Ghallab et al., 1998) that is difficult to for-
mulate as a neural network input due to its logic-like
structure.
Therefore, there are many different representa-
tions used across the existing works. Image represen-
tation has been used at (Asai and Fukunaga, 2017),
(Asai and Fukunaga, 2018) and (Asai and Muise,
2020) to explore planning in the latent space and gen-
erating PDDL from problem images.
Learning heuristic functions and search policies
has also been greatly explored. In (Toyer et al., 2020)
authors use neural network architecture tailored ac-
cording to the problem structure to avoid using the
PDDL and then learn action policies for problem do-
mains. Authors in (Shen et al., 2020) use hyper-
graph neural networks to learn a heuristic function
from state-value pairs, using the PDDL language for
building the neural network input. Another widely
used approach is Graph Neural Networks (GNN) that
were used to compute action policies by authors in
(St
˚
ahlberg et al., 2021), (St
˚
ahlberg et al., 2022) and
(St
˚
ahlberg et al., 2023) exploring different learning
methods in each of the works. The GNN-driven ap-
proach also works more with the logical representa-
tion of the problem.
Part of the existing approaches uses planning
problems that are implicitly defined on a grid and
can be easily transformed into an intuitive tensor rep-
resentation that can act as a neural network input.
One of the first works has been shown in (Groshev
et al., 2018) where authors used Convolutional Neu-
ral Networks (CNN) to learn policies for search algo-
rithms. Another approach was shown in (Urbanovsk
´
a
and Komenda, 2021) where authors used CNN and
Recurrent Neural Networks (RNN) architectures to
compute heuristic values for problems on grids. An-
other architecture used for this purpose is the Cel-
lular Simultaneous Recurrent Networks (CSRN) that
was used initially in (Ilin et al., 2008) to solve the
maze-traversal problem and its usage was extended
to different problem domains in (Urbanovska and
Komenda, 2023) together with analysis of training
this architecture. The last extension of this architec-
592
Urbanovská, M. and Komenda, A.
Explainability Insights to Cellular Simultaneous Recurrent Neural Networks for Classical Planning.
DOI: 10.5220/0012375800003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 592-599
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

1x1
2x1 2x1
L
L L
EXIT
Figure 1: Example of a Tetris problem instance with 1 block
of each type (left) and a Rush Hour problem instance with
one small car and one large car (right).
ture has been proposed in (Urbanovsk
´
a and Komenda,
2023) where the authors use a tensor representation
motivated by the problems’ semantics to train the se-
mantically layered CSRN (slCSRN). The architec-
tures trained in this work are all based on the architec-
ture described in (Urbanovsk
´
a and Komenda, 2023).
However, the number of problem domains avail-
able for the semantically layered representation pro-
posed in (Urbanovsk
´
a and Komenda, 022a) is still
limited. Therefore, in this work, we extend the
number of available domains by the Tetris and
Rush Hour planning domains and propose their one-
layer and multi-layer semantically layered representa-
tions. These domains differ from the existing (maze,
Sokoban) domains since they do not have one explic-
itly defined agent who performs all the actions, but
they contain independent movement of different ob-
jects in the problem. We train the slCSRN archi-
tecture variants for both of these domains and com-
pare their performance with existing classical plan-
ning heuristics. We also analyze the computation of
the architectures and provided several insights into
what are the slCSRNs actually learning. That way
we can make a step towards AI explainability, which
we consider an important feature of machine learning
in the modern days.
2 PROBLEM DOMAINS
We use two problem domains in this work. The first
one is Tetris domain, inspired by the famous puzzle
game. This problem domain has been used in the
International Planning Competition. In the planning
version of Tetris, there are three types of blocks (1×1,
2 × 1, and an L block) that are randomly placed on a
grid as shown in Figure 1. The goal is to rotate and
move the blocks, so they all fit into the bottom half of
the grid, leaving the top half of the grid empty.
The second problem domain is the Rush Hour
puzzle, inspired by the already existing board game.
In Rush Hour, there is a 6 × 6 grid map that contains
randomly placed small (1 × 2) and large (1 × 3) cars
that are blocking the route for the red car that you
Tetris
in 2D
0 0 0 0
0 0 0 0
0 1 0 0
0 0 0 0
0 0 0 0
0 0 0 0
1x1 layer 2x1 layer
L layer
0 0 0 0
0 0 0 0
0 0 0 0
0 1 1 0
0 1 1 0
0 0 0 0
0 1 1 1
0 1 1 1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
Tetris in semantically layered
representation - one- layer
0 0 0 0
0 0 0 0
0 1 0 0
0 0 0 0
0 0 0 0
0 0 0 0
1x1 layer
2x1 layer
L layer
Tetris in semantically layered
representation - multi- layer
0 0 0 0
0 0 0 0
0 0 0 0
0 1 0 0
0 1 0 0
0 0 0 0
0 0 1 1
0 0 0 1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
2x1 layer
0 0 0 0
0 0 0 0
0 0 0 0
0 0 1 0
0 0 1 0
0 0 0 0
L layer
0 1 0 0
0 1 1 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
Figure 2: Semantically layered representation for a Tetris
problem instance - both one-layer and multi-layer represen-
tation.
have to slide across the whole grid to reach the exit.
The complexity of this puzzle is P-SPACE complete
(Flake and Baum, 2002).
Both of the used problems do not contain a single
agent that performs the actions. We can also think of
these problems as of multi-agent ones.
Next, we introduce the one-layer and multi-layer
semantical representations for both of these problem
domains. All described representations also follow
the rules stated in (Urbanovsk
´
a and Komenda, 2023)
and before the semantically layered representation
acts as an input to the slCSRN, we pad it with ”walls”
and add one layer for this padding.
2.1 Tetris Representation
The Tetris domain has an explicitly defined grid in its
PDDL representation by stating a number of grid cells
and their connections. The one-layer representation
depends on the number of object types in the problem.
In this case, we have three types of blocks. Therefore,
the one-layer representation has one layer for every
block type. That creates a quite compact input, but it
can also cause problems when distinguishing the in-
dividual blocks of one type, as shown in (Urbanovsk
´
a
and Komenda, 022a).
The multi-layer representation has a number of
layers equal to the number of individual blocks. The
representation can get a lot larger compared to the
one-layer one, but each block has its layer and can
be identified without problems, which gives us more
information about the individual blocks. Both repre-
sentations are shown in Figure 2.
Explainability Insights to Cellular Simultaneous Recurrent Neural Networks for Classical Planning
593
Rush Hour
in 2D
EXIT
Rush Hour in semantically
layered representation - one- layer
0 0 0 0
0 0 1 0
1 1 1 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0
0 0
0 0
0 0
0 0
0 0
small car layer
0 1 1 1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0
1 0
1 0
1 0
0 0
0 0
large car layer
Rush Hour in semantically
layered representation - multi- layer
0 0 0 0
0 0 0 0
1 1 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0
0 0
0 0
0 0
0 0
0 0
small car layer
0 1 1 1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0
0 0
0 0
0 0
0 0
0 0
large car layer
0 0 0 0
0 0 1 0
0 0 1 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0
0 0
0 0
0 0
0 0
0 0
small car layer
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0
1 0
1 0
1 0
0 0
0 0
large car layer
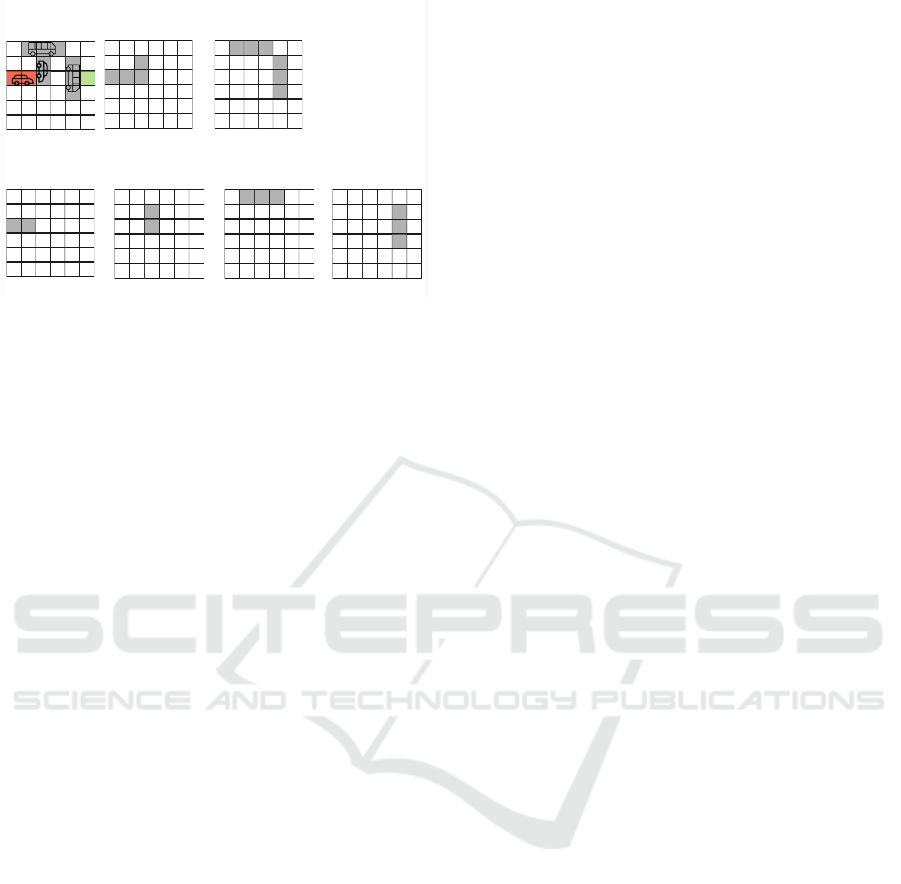
Figure 3: Semantically layered representation for a Rush
Hour problem instance - both one-layer and multi-layer rep-
resentation.
2.2 Rush Hour Representation
The Rush Hour puzzle is played on a 6× 6 grid, how-
ever, the problems can be created on an arbitrarily
sized grid with an arbitrary number of cars. The size
of the grid is defined in the PDDL similarly to the
Tetris grid. The number of object types in this case
is only two. Therefore, in the one-layer representa-
tion, we have two layers, each for one type of car.
In the layer with small cars (1 × 2), we also place the
”red car” which is the most important one in the game
since it is the car that has to exit the map. The next
layer is for the large cars (1 × 3).
The multi-layer representation has one layer for
every car. That has a clear advantage for the ”red car”
that is easier to identify in this representation. Both
representations are shown in Figure 3.
3 TRAINING
We used the exact architecture as proposed in (Ur-
banovsk
´
a and Komenda, 2023). That allowed us to
train 4 versions of the slCSRN architecture
• slCSRN with one-layer representation
• slCSRN with multi-layer representation
• unfolded slCSRN with one-layer representation
• unfolded slCSRN with multi-layer representation
Differences between the representations are de-
scribed in Section 2. The slCSRN uses weight sharing
among its recurrent networks, the unfolded slCSRN
uses one set of weights for one recurrent iteration.
Another parametrization of the training comes
from the architecture itself, as we can set the number
of recurrent iterations and hidden states of the archi-
tecture. We stuck to the previous works that used the
combinations of parameters
• number of recurrent iterations = [10, 20, 30]
• number of hidden states = [5, 15, 30]
The loss function used for training is the mono-
tonicity inducing loss as proposed in (Urbanovsk
´
a
and Komenda, 2021) that focuses rather on the mono-
tonicity of the learned heuristic values rather than on
the absolute values themselves. All the configurations
were trained for 2000 epochs.
The training data for both domains were generated
randomly. Tetris training data was of size 2 × 2 and
4 × 2 with 1 − 4 blocks. The Rush-Hour training data
was of size 3 × 3, 3 × 4, 4 × 3, and 4×4 with up 2 − 5
small cars and 0 − 2 large cars placed on the map.
As labels, we used the optimal solution lengths
that we acquired using the Breadth-first Search algo-
rithm.
For every slCSRN version, we selected the best
configuration for the planning experiments. The se-
lected configurations for both problem domains are
shown in Table 1.
4 PLANNING EXPERIMENTS
The planning experiments are performed by using
the selected trained slCSRN architectures as heuris-
tic functions in a search algorithm. Similarly to the
previous works, we are using the Greedy Best-first
Search that uses solely the heuristic value to guide the
search.
It is not our main goal to outperform any ex-
isting heuristics, we simply want to see the perfor-
mance of the machine learning-based approaches to
see the comparison and get more insight into the
learned heuristic functions. We run the experiments
of the blind heuristic, h
max
(Bonet and Geffner, 2001),
h
add
(Bonet and Geffner, 2001) and h
FF
(Hoffmann,
2001).
The blind heuristic serves as a baseline that gives
us the equivalent of a random search, as it always re-
turns 0 for any state. The other three heuristic func-
tions are widely used in the field of classical planning.
slCSRN and unfolded slCSRN configuration used in
these experiments are shown in Table 1.
The planning experiments were performed on one
dataset for each domain with 50 problem instances.
Each problem instance had a time limit of 10 min-
utes. We used 3 metrics to compare the results. The
most important one is coverage (cvg) which shows the
percentage of solved problems from the given set. It is
commonly used in classical planning. Other than that,
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
594
Table 1: Selected slCSRN and unfolded slCSRN architectures for each semantically layered representation of Tetris and Rush
hour. These will be further used in the planning experiments.
Tetris Rush hour
Architecture Representation Recurrent iterations Hidden states Recurrent iterations Hidden states
slCSRN one-layer 10 5 20 30
slCSRN multi-layer 10 30 10 30
unfolded slCSRN one-layer 20 30 10 5
unfolded slCSRN multi-layer 10 5 10 30
Table 2: Planning experiments for the Tetris domain. All
the best results are in bold lettering. The slCSRN architec-
ture input representation is denoted ol for one-layer and ml
for multi-layer. This representation is followed by architec-
tures’ parameters.
Tetris
avg pl avg ex cvg
blind 4.55 4045.26 0.84
h
max
5.16 471.63 0.98
h
add
5.14 18.08 0.98
h
FF
5.73 36.57 0.98
slCSRN-ol-10-5 4.21 4.38 0.48
slCSRN-ml-10-30 8.10 19.29 0.62
unfolded slCSRN-ol-20-30 4.35 4.74 0.46
unfolded slCSRN-ml-10-5 8.30 11.5 0.6
Table 3: Planning experiments for the Rush Hour domain.
All the best results are in bold lettering. The slCSRN ar-
chitecture input representation is denoted ol for one-layer
and ml for multi-layer. This representation is followed by
architectures’ parameters.
Rush Hour
avg pl avg ex cvg
blind 73.81 5210.19 0.96
h
max
74.62 2765.02 0.96
h
add
77.21 3343.23 0.94
h
FF
76.61 2765.53 0.98
slCSRN-ol-20-30 84.3 3580.9 0.8
slCSRN-ml-10-30 81.49 4952.08 0.78
unfolded slCSRN-ol-10-5 86.68 5035.64 0.94
unfolded slCSRN-ml-10-30 83.95 4104.16 0.76
we also use the average plan length (avg pl) and the
average number of expanded states (avg ex) to gain
more information.
The dataset used in these experiments contains
problem instances that were not present in the training
data, and the grids are larger than the training sam-
ples for both the Tetris and the Rush Hour domain.
The Tetris grids in this set are of sizes 4 × 4 and 6 × 4
with 3 − 6 blocks. The Rush Hours problem instances
are all on 6 ×6 grid and were taken from the database
available at (Fogleman, 2023). We took the 50 puz-
zles with the longest solutions that contained no walls
for the planning dataset.
The complete results can be seen in Table 2 for the
Tetris domain and Table 3 for the Rush Hour domain.
4.1 Tetris Result Discussion
The results of the planning experiment in Table 2
show that the coverage metric is a lot lower than in
the case of classical planning heuristics. This can be
caused by multiple things, including computational
time, therefore we decided to provide a further anal-
ysis of the planning results for the Tetris domain by
comparing each learned heuristic with the classical
planning heuristics separately only using the solved
problem instances. That way, we can compare each
trained slCSRN version fairly and see if there is any
advantage in its performance in terms of the other
metrics.
Table 4: More detailed analysis of the Tetris planning ex-
periments results for each configuration’s solved instances.
Each section of the table relates to the corresponding slC-
SRN configuration and the best results are in bold lettering.
Tetris
avg pl avg ex
h
max
3.71 25.92
h
add
3.58 8.21
h
FF
4.08 13.67
slCSRN-ol-10-5 4.21 4.38
h
max
4.03 113.45
h
add
4.0 12.68
h
FF
4.52 13.58
slCSRN-ml-10-30 8.1 19.29
h
max
3.61 15.74
h
add
3.52 6.48
h
FF
4.0 9.96
unfolded slCSRN-ol-20-30 4.35 4.74
h
max
4.1 240.47
h
add
4.03 15.4
h
FF
4.63 25.0
unfolded slCSRN-ml-10-5 8.3 11.5
Even though the overall coverage does not seem
very impressive for the learned heuristics for the
Tetris domain, we can see that the individual learned
heuristics are performing greatly in the instances they
solved. In Table 4, we can see that three out of the
four trained slCSRN versions dominate in the average
number of expanded states.
That means that the learned heuristics were able
to navigate the search algorithm more reliably than
the classical planning heuristics. Since we are using a
Explainability Insights to Cellular Simultaneous Recurrent Neural Networks for Classical Planning
595

greedy search algorithm, the path length comparison
does not carry a lot of importance since the search
does not have a guarantee on the solutions’ length.
4.2 Rush-Hour Result Discussion
Results for the Rush-Hour domain can be seen in Ta-
ble 3. In this case, the coverage is much closer to
the classical planning heuristics. We can see that the
unfolded slCSRN that uses one-layer representation
was able to achieve 94% coverage, which is on par
with the classical planning heuristics. Even the ar-
chitecture with the least coverage was able to solve
76% of the problems. Both average path length and
average number of expanded states are between the
blind search and the other classical planning heuris-
tics. That implies that the learned heuristics are work-
ing better than no heuristic at all, but their informa-
tiveness does not seem to be up to the classical heuris-
tic standards.
5 EXPLAINABILITY INSIGHTS
The explainability of Artificial Intelligence is an im-
portant and well-discussed topic. Many methods have
been developed to support explainability on images
(Haar et al., 2023) or for large language models (Zhao
et al., 2023). However, there are not many approaches
that would be usable on a recurrent message passing
architecture such as slCSRN. Therefore, we wanted to
approach the explanation a little more intuitively and
provide some insights into the slCSRN computations
using classical planning. We would also like to men-
tion that this analysis does not fully explain the per-
formance of the individual trained models in the plan-
ning experiments, but rather provides a deeper under-
standing of the heuristic computation by the slCSRN.
To keep the results compact, we decided to per-
form the explainability analysis with the trained net-
works chosen for the planning experiments for both
problem domains.
We used the same strategy for both problem do-
mains. We created a very simple toy problem instance
with only one movable object that was solvable sim-
ply by moving it in one direction for a number of
steps.
The toy problem for the Tetris domain is shown in
Figure 4. The problem consisted of only one square
block and a long, narrow path. The smallest instance’s
path length was one, the longest was 30. The final
size 30 was taken from the maximum number of re-
current iterations that we used in the training of the
models. For each of these created instances, we gen-
.
.
.
...
Plan
length
1 2
3 4
30
1
2
3
4
30
EXIT
EXIT
EXIT
EXIT
EXIT
...
...
Plan
length
Tetris
Rush Hour
Figure 4: Toy data for Tetris (left side) and Rush Hour (right
side) used for the explainability analysis. We can see the
plan length near each problem instance.
erated all possible states starting from the given in-
stance and also saved the number of steps needed to
solve each state.
For the Rush Hour domains, the dataset was cre-
ated accordingly as shown in Figure 4. The smallest
instance only requires one step to reach the goal, the
largest instance requires 30 steps.
The next step is letting the slCSRN architecture
compute a heuristic value for every single generated
state in the dataset. This data can be shown in a plot
for each sample to see the slCSRN behavior for every
problem instance over all of its states.
We can see an example of this plot in Figure 5
where each line consists of heuristic values computed
by the corresponding slCSRN for the Tetris domain.
We can see that the architecture converged to a certain
pattern in that has been satisfactory for the loss func-
tion during the training. This behaviour has been the
same for all the architectures.
The same plots for the Rush Hour domain can be
seen in Figure 7. Each line in the graph represents
one problem instance, and each value along the way
shows the heuristic estimate at the given number of
steps away from the goal. In this case, we do not see
the patterns that were obvious for the Tetris domain,
but we can see that the variance of the generated val-
ues greatly differs across the models.
To learn more about the actual quality of the
heuristic and not just the shape of the learned heuris-
tic function, we can take the heuristic values for each
problem instance and for every state on the way from
the initial state to the goal and compare it to its neigh-
boring values. As we already mentioned, the loss
function we used is focused on monotonicity. There-
fore, we can count how many heuristic values for each
number of steps are correctly placed within the array
of values. In Figure 6, we can see that the mono-
tonicity over the different number of steps to the goal
is not very high overall. We see that the majority of
correctly generated values in terms of monotonicity
appear very close to the goal. For the rest of the path,
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
596

the architecture is rather uncertain about the goal dis-
tance estimate and does not place the heuristic values
in the correct order very often.
In the case of the Rush Hour domain, we can see in
Figure 8 that the number of correctly placed heuristic
values slightly differs for each displayed architecture
version. We can assume that high values mark par-
ticular distances, where the network makes a decision
that is statistically important for the search.
The slCSRN-ml-10-30 was the weakest of these
four architectures in terms of performance in the plan-
ning experiments. We can see the highest number
of correctly generated values around 6–7 steps from
the goal, but before and after the values are very low,
which could cause the performance issues.
The unfolded slCSRN-ol-10-5 has quite a high
number of correctly generated heuristic values up to
11 steps away from the goal. That implies that the
navigation is a lot more reliable around the goal and
once the number of steps needed to solve the prob-
lem goes higher, the network does not provide a very
reliable estimate.
Figure 5: Heuristic values for the Tetris explainability
dataset.
Figure 6: Monotonicity counts for the Tetris heuristic val-
ues. The blue values show numbers for the perfect mono-
tonicity, the orange values are achieved by the correspond-
ing slCSRN.
Figure 7: Heuristic values for the Rush Hour explainability
dataset.
5.1 Explainability Discussion
Overall, we can see that the training had a different
effect on each of the two domains. Let us discuss
the possible outcomes of the proposed explainability
analysis.
The architectures trained on the Tetris domain
learned a repetitive pattern that occurs for instances
of various plan lengths shown in Figure 5. This might
imply that there really is a simple algorithm-like pat-
tern generating heuristic values for this problem do-
main. On the other hand, this pattern can also be
caused by any problem in the training dataset, just as
an insufficient amount of training samples that cause
overfitting.
The Rush Hour sample analysis shown in Figure 7
seems to have a better representation of the networks’
computations, and the monotonicity counting analy-
sis indicated that the number of steps estimable by
the models is certainly limited. However, even the
less informed estimates far away from the goal can
be informative for the search algorithms. We can see
that the estimates further from the goal are forming
smoother curves, and therefore the values are less ac-
curate, which is caused by the limited number of iter-
ations of the slCSRN architecture.
Another insight based on the explainability analy-
sis can be read as the ability of the learning process to
Explainability Insights to Cellular Simultaneous Recurrent Neural Networks for Classical Planning
597
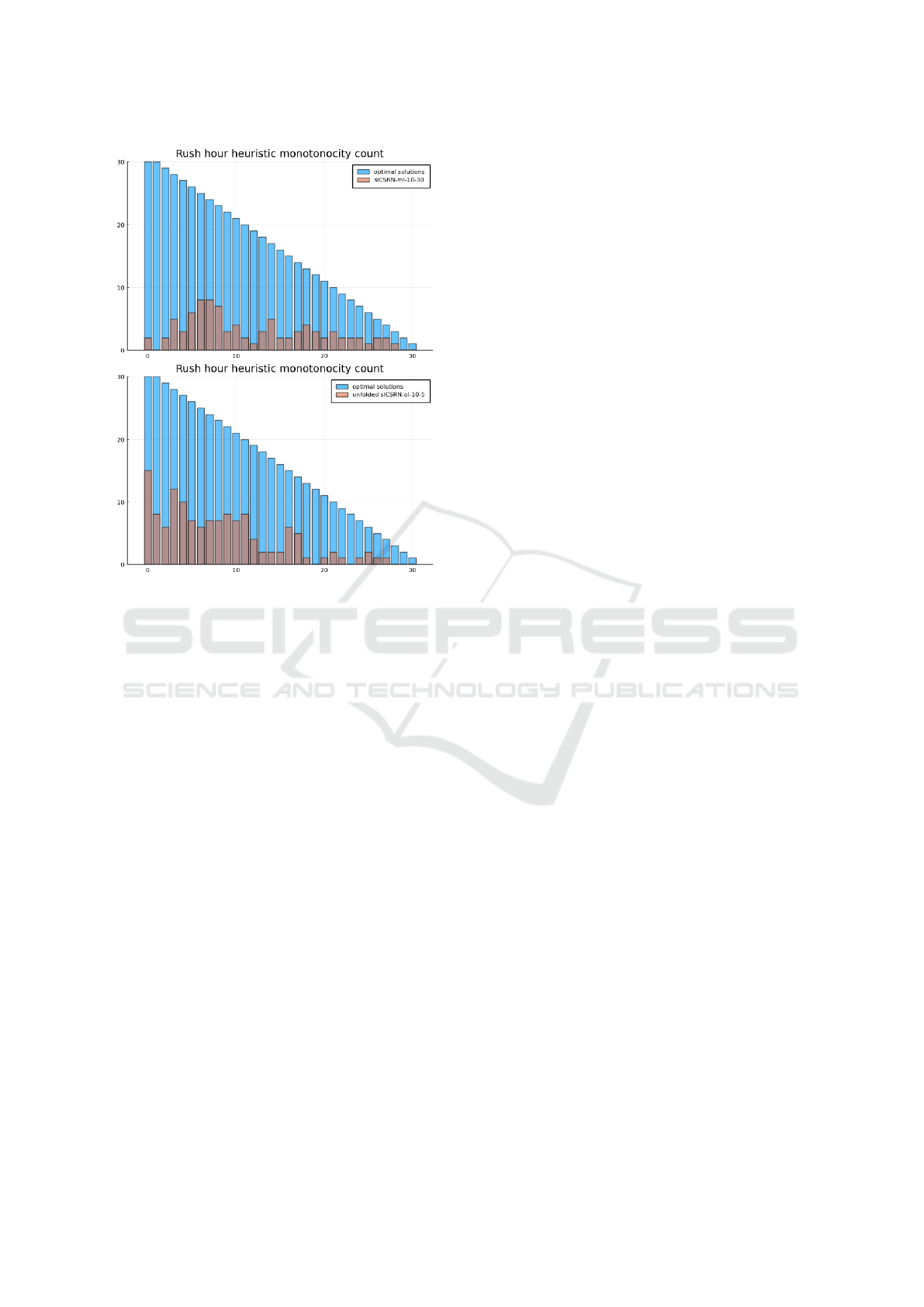
Figure 8: Monotonicity counts for the Rush Hour heuris-
tic values. The blue values show numbers for the perfect
monotonicity, the orange values are achieved by the corre-
sponding slCSRN.
reflect the need for a more systematic or randomized
approach to solve different planning problems. On the
one hand, the Tetris problems need a more systematic
approach, as the problem is not overly constrained.
The Tetris pieces are in most cases loose and mov-
able in all directions, only with the exception, of when
they are getting stacked to the goal part of the grid.
On the other hand, the cars in the Rush Hour are al-
ways highly constrained in movement, (a) only in two
directions, (b) by other cars around. The more con-
strained problems are more easily solvable by more
randomized strategies. Intuitively, if we ”randomly
shuffle” the Rush Hour puzzle with a bias toward the
goal, we will have a higher chance of solving the
problem than if we randomly shuffle the Tetris do-
main, where we will only get most of the pieces into
the empty part of the grid and jiggle them around their
positions (that will happen even with a bias towards
the goal area because some pieces have to wait for
correct positioning of others).
The Table 2 exhibits low coverage results, as for
the machine-learning-based heuristics it is more com-
plicated to learn systematic heuristic evaluation, than
randomization. However, as Table 3 shows, in the
case of Rush Hour the randomization gets on par in
the coverage of the solved problems with the classi-
cal systematic heuristics as h
max
, h
add
, h
FF
. A similar
pattern can be seen in the explainability analysis of
the heuristic values in Figure 7, which exhibits clearly
noisy behavior in Rush Hour, especially for the best
performing network unfolded slCSRN-ol-10-5. In the
case of Tetris, the neural network, however, behaves
systematically, providing a repetitive pattern of the
heuristic values estimation based on the distance from
the goal.
6 CONCLUSION
We have successfully tested the set of available do-
mains for heuristic learning by slCSRN architecture
on two domains — Tetris and Rush Hour. Both of
these domains show properties different from the do-
mains previously used with slCSRN as they contain
multiple movable objects that influence the available
actions of many different objects in the problem.
We have trained both slCSRN and unfolded slC-
SRN architectures with both one-layer and multi-
layer semantically layered representations for both of
the domains. We also compared the performance of
these trained models in a heuristic search to classical
planning heuristic functions.
On top of that, we analyzed the behavior of the
trained models and created an explainability tech-
nique that allows us to describe the behavior. We cre-
ated an explainability dataset consisting of differently
sized levels of a simple toy problem that allowed us to
analyze how the networks behave regarding the plan
length. With this dataset, we analyzed the shape of the
learned heuristic functions and also the monotonicity
of produced values. These insights gave us a better
idea of what the models learn and how the learning
differs for domains requiring more systematic or ran-
domized heuristic functions.
In the future,
In the future, a potential direction could involve
focusing on domains that are not explicitly defined on
a grid and creating a universal translating algorithm
for any PDDL problem into a semantically layered
representation. Moreover, there is an interest in on-
going exploration of the explainability field, examin-
ing diverse methods that might contribute to a deeper
understanding of these approaches.
ACKNOWLEDGEMENTS
The work of Michaela Urbanovsk
´
a was supported
by the European Union’s Horizon Europe Research
and Innovation program under the grant agreement
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
598

TUPLES No 101070149 and by the Grant Agency
of the Czech Technical University in Prague, grant
No. SGS22/168/OHK3/3T/13. The work of Anton
´
ın
Komenda was supported by the Czech Science Foun-
dation (grant no. 22-30043S).
REFERENCES
Asai, M. and Fukunaga, A. (2017). Classical planning in
deep latent space: From unlabeled images to PDDL
(and back). In Besold, T. R., d’Avila Garcez, A. S.,
and Noble, I., editors, Proceedings of the Twelfth In-
ternational Workshop on Neural-Symbolic Learning
and Reasoning, NeSy 2017, London, UK, July 17-18,
2017, volume 2003 of CEUR Workshop Proceedings.
Asai, M. and Fukunaga, A. (2018). Classical planning in
deep latent space: Bridging the subsymbolic-symbolic
boundary. In Thirty-Second AAAI Conference on Ar-
tificial Intelligence.
Asai, M. and Muise, C. (2020). Learning neural-symbolic
descriptive planning models via cube-space priors:
The voyage home (to STRIPS). In Bessiere, C., editor,
Proceedings of the Twenty-Ninth International Joint
Conference on Artificial Intelligence, IJCAI 2020,
pages 2676–2682. ijcai.org.
Bonet, B. and Geffner, H. (2001). Planning as heuristic
search. Artificial Intelligence, 129(1-2):5–33.
Flake, G. and Baum, E. (2002). Rush hour is pspace-
complete, or “why you should generously tip park-
ing lot attendants”. Theoretical Computer Science,
270:895–911.
Fogleman, M. (2023). Rush hour instance database.
Ghallab, M., Knoblock, C., Wilkins, D., Barrett, A., Chris-
tianson, D., Friedman, M., Kwok, C., Golden, K.,
Penberthy, S., Smith, D., Sun, Y., and Weld, D.
(1998). Pddl - the planning domain definition lan-
guage.
Groshev, E., Tamar, A., Goldstein, M., Srivastava, S., and
Abbeel, P. (2018). Learning generalized reactive poli-
cies using deep neural networks. In 2018 AAAI Spring
Symposium Series.
Haar, L. V., Elvira, T., and Ochoa, O. (2023). An analy-
sis of explainability methods for convolutional neural
networks. Engineering Applications of Artificial In-
telligence, 117:105606.
Hoffmann, J. (2001). Ff: The fast-forward planning system.
AI magazine, 22(3):57–57.
Ilin, R., Kozma, R., and Werbos, P. J. (2008). Beyond feed-
forward models trained by backpropagation: A prac-
tical training tool for a more efficient universal ap-
proximator. IEEE Transactions on Neural Networks,
19(6):929–937.
Shen, W., Trevizan, F. W., and Thi
´
ebaux, S. (2020). Learn-
ing domain-independent planning heuristics with hy-
pergraph networks. In Beck, J. C., Buffet, O., Hoff-
mann, J., Karpas, E., and Sohrabi, S., editors, Pro-
ceedings of the Thirtieth International Conference on
Automated Planning and Scheduling, Nancy, France,
October 26-30, 2020, pages 574–584. AAAI Press.
St
˚
ahlberg, S., Bonet, B., and Geffner, H. (2021). Learning
general optimal policies with graph neural networks:
Expressive power, transparency, and limits. CoRR,
abs/2109.10129.
St
˚
ahlberg, S., Bonet, B., and Geffner, H. (2022). Learning
generalized policies without supervision using gnns.
In Kern-Isberner, G., Lakemeyer, G., and Meyer, T.,
editors, Proceedings of the 19th International Confer-
ence on Principles of Knowledge Representation and
Reasoning, KR 2022, Haifa, Israel, July 31 - August
5, 2022.
St
˚
ahlberg, S., Bonet, B., and Geffner, H. (2023). Learn-
ing general policies with policy gradient methods. In
Marquis, P., Son, T. C., and Kern-Isberner, G., editors,
Proceedings of the 20th International Conference on
Principles of Knowledge Representation and Reason-
ing, KR 2023, Rhodes, Greece, September 2-8, 2023,
pages 647–657.
Toyer, S., Thi
´
ebaux, S., Trevizan, F. W., and Xie, L. (2020).
Asnets: Deep learning for generalised planning. J.
Artif. Intell. Res., 68:1–68.
Urbanovsk
´
a, M. and Komenda, A. (2021). Neural net-
works for model-free and scale-free automated plan-
ning. Knowledge and Information Systems, pages 1–
36.
Urbanovsk
´
a, M. and Komenda, A. (2022a). Grid represen-
tation in neural networks for automated planning. In
Rocha, A. P., Steels, L., and van den Herik, H. J., edi-
tors, Proceedings of the 14th International Conference
on Agents and Artificial Intelligence, ICAART 2022,
Volume 3, Online Streaming, February 3-5, 2022,
pages 871–880. SCITEPRESS.
Urbanovska, M. and Komenda, A. (2023). Analysis of
learning heuristic estimates for grid planning with cel-
lular simultaneous recurrent networks. SN Computer
Science, 4.
Urbanovsk
´
a, M. and Komenda, A. (2023). Semantically
layered representation for planning problems and its
usage for heuristic computation using cellular simul-
taneous recurrent neural networks. In Rocha, A. P.,
Steels, L., and van den Herik, H. J., editors, Proceed-
ings of the 15th International Conference on Agents
and Artificial Intelligence, ICAART 2023, Volume 3,
Lisbon, Portugal, February 22-24, 2023, pages 493–
500. SCITEPRESS.
Zhao, H., Chen, H., Yang, F., Liu, N., Deng, H., Cai, H.,
Wang, S., Yin, D., and Du, M. (2023). Explain-
ability for large language models: A survey. CoRR,
abs/2309.01029.
Explainability Insights to Cellular Simultaneous Recurrent Neural Networks for Classical Planning
599
