
Automatic Registration of 3D Point Cloud Sequences
Nat
´
alie V
´
ıtov
´
a
a
, Jakub Frank and Libor V
´
a
ˇ
sa
b
Department of Computer Science And Engineering, Faculty of Applied Sciences, University of West Bohemia,
Univerzitn
´
ı 8, 301 00 Plze
ˇ
n, Czech Republic
Keywords:
Registration, Point Cloud, Dynamic, Series, Kinect, Sensor, Alignment.
Abstract:
Surface registration is a well-studied problem in computer graphics and triangle mesh processing.
A plethora of approaches exists that align a partial 3D view of a surface to another, which is a central task
in 3D scanning, where usually each scan only provides partial information about the shape of the scanned
object due to occlusion. In this paper, we address a slightly different problem: a pair of depth cameras is
observing a dynamic scene, each providing a sequence of partial scans. The scanning devices are assumed to
remain in a constant relative position throughout the process, and therefore there exists a single rigid trans-
formation that aligns the two sequences of partial meshes. Our objective is to find this transformation based
on the data alone, i.e. without using any specialized calibration tools. This problem can be approached as
a set of static mesh registration problems; however, such an interpretation leads to problems when enforcing
a single global solution. We show that an appropriate modification of a previously proposed consensus-based
registration algorithm is a more viable solution that exploits information from all the frames simultaneously
and naturally leads to a single global solution.
1 INTRODUCTION
Depth cameras, both time-of-flight- and structured-
light-based, are popular tools for obtaining informa-
tion about a 3D shape. Devices such as various ver-
sions of Microsoft Kinect or Intel RealSense provide
a depth map, where each pixel represents a depth mea-
surement—its intensity is related to the distance from
the device to the nearest surface. However, even in
ideal conditions, such data is insufficient for scanning
even simple shapes due to self-occlusion. When con-
structing a full model, the scanning device is typi-
cally moved around, capturing the shape from vari-
ous points of view, or the object itself is moved, po-
tentially using a turntable, to acquire multiple par-
tial views that can be combined into a single, com-
plete model. The process of finding the rigid transfor-
mations that transform the partial scans into a single
global coordinate system is known as registration.
However, this approach cannot be applied when
the object being captured is dynamic. In such a case,
it is possible to use multiple scanning devices, each
covering a part of the surface. If these devices work
at the same frame rate and are synchronized, corre-
a
https://orcid.org/0009-0009-4596-1271
b
https://orcid.org/0000-0002-0213-3769
sponding frames can be aligned and form a more com-
plete view of the scene than each separately. How-
ever, due to the dynamic nature of the data, frames
captured at different time instants cannot be aligned
since they capture a different shape, in general. On
the other hand, as long as the capture devices remain
at a constant relative position, the solution to the reg-
istration problem should remain constant for each pair
(or set) of partial meshes captured at the same time in-
stant. This, in turn, can and should be used when find-
ing the transformation: the solution should align all
the frames where non-ambiguous shape matches are
present. When shapes match ambiguously or poorly
in a certain frame, information from the other frames
can be used to resolve the ambiguity.
Our primary focus is on applying virtual reality
in physiotherapy, specifically for patients with condi-
tions like multiple sclerosis. In this context, patients
perform exercises in a virtual environment, evaluated
in real-time using trackers. These exercises, rooted
in proprioceptive neuromuscular facilitation (Moreira
et al., 2017), involve seated upper limb movements in
a diagonal direction. To demonstrate the exercises ef-
fectively, we aim to show patients a 3D recording of
the ideal performance, captured with a 3D acquisition
device (Microsoft Kinect for Azure). However, a sin-
Vítová, N., Frank, J. and Váša, L.
Automatic Registration of 3D Point Cloud Sequences.
DOI: 10.5220/0012388400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 261-268
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
261

gle viewpoint provides insufficient data, prompting us
to seek a setup that captures at least two points of view
and merges the data into a comprehensive stream of
point clouds.
While temporal synchronization is easily
achieved, spatial alignment of the partial streams
poses a challenge. We strive for a user-friendly
setup for therapists, avoiding complex calibration and
allowing automatic data merging. Our approach mod-
ifies an existing static mesh registration algorithm,
enabling natural alignment of point cloud sequences.
The resulting tool is versatile, robust, fully automatic,
and generates a single aligning transformation based
on information from all frames, excluding those with
limited reliable information.
2 RELATED WORK
The challenge of registering 3D shapes — aligning
their overlapping parts through a rigid orientation-
preserving transformation (known as a special orthog-
onal transformation, SO(3)) — is a well-studied prob-
lem. It arises not only in completing partial scans
but also in areas like motion analysis, scene analy-
sis, object identification, and retrieval. While the hu-
man brain finds the problem essentially easy, being
trained to match 3D shapes, constructing a reliable
and fast computer algorithm for this problem proves
to be rather difficult. This difficulty stems from the di-
mension of the solution space (6D), which prohibits
efficient brute-force methods, and the general chal-
lenge of representing the naturally understood con-
cept of (even local) shape similarity while working
with the most common shape representations like tri-
angle meshes or point clouds.
Out of the plethora of algorithms, we mention
a few that are relevant to this work (for a comprehen-
sive overview, refer to (Castellani and Bartoli, 2020)).
Algorithms can generally be local, starting with some
initial relative position of the input shapes and iter-
atively improving their alignment, or global, finding
an aligning transformation independently of the initial
relative position of the inputs. A popular local tech-
nique is the Iterative Closest Point algorithm (ICP),
which alternates between estimating correspondences
and finding the optimal rigid transformation that best
aligns the correspondence pairs in the sense of the
sum of squared distances. Note that the last task can
be solved in closed form using the Kabsch algorithm
(Kabsch, 1976).
Later, the ICP approach has been improved in var-
ious ways, focusing on aspects like pruning corre-
spondences or using different objectives for the op-
timal rigid transformation step. In particular, various
norms have been investigated in the work of (Bouaziz
et al., 2013), yielding an algorithm that is claimed to
perform on par with global registration algorithms.
Another similar borderline approach has been pro-
posed by (Zhou et al., 2016). It uses the Fast Point
Feature Histogram (FPFH, proposed by (Rusu et al.,
2009)) features that are matched, and a subset of valid
matching pairs is iteratively refined, using an objec-
tive function that smoothly transits from global to lo-
cal matching.
Fully global approaches usually rely on identify-
ing specific shape features in the pair of shapes be-
ing aligned. These may include a quadruple of points
in a certain configuration, used by algorithms like
4pcs (Aiger et al., 2008) or Super4pcs (Mellado et al.,
2014), or a local curvature-based descriptor used by
the RANSAC algorithm proposed by (Hruda et al.,
2019). The latter serves as the basis on which our
registration for dynamic point clouds is build, thus it
is described in more detail in 3.2.
All algorithms mentioned are primarily targeted
at registering static triangle meshes. Several ways ex-
tend this task to a ”dynamic” setting, such as combin-
ing shape and color information (Bouaziz and Pauly,
2013), scanning a static object with a moving camera
(Weber et al., 2015; He et al., 2018), or dealing with
a deforming object (Mitra et al., 2007). Articulated
shapes are explored by (Chang and Zwicker, 2008).
None of these interpretations of ”dynamic” matches
our objective.
Our work relates more closely to the problem of
(semi-)automatic calibration of 3D scanning devices.
Here, the task is also finding a rigid transformation to
bring data captured by one sensor into the coordinate
frame of another. However, the tools used for this task
are usually different from the ones we wish to use:
typically, a custom apparatus, such as a checkerboard
pattern in (Raposo et al., 2013a; Raposo et al., 2013b),
a colored sphere in (Fornaser et al., 2017), or a partic-
ular human pose as proposed by (Eichler et al., 2022),
is used in the pre-capture stage. The camera/sensor
setup is then deemed calibrated until the devices are
moved, using the results of the preprocessing step to
bring the inputs into alignment. However, our objec-
tive is to eliminate the need for a dedicated calibration
stage and the risk of calibration loss that may occur
before actual acquisition.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
262

3 REGISTRATION ALGORITHM
DESCRIPTION
In this section, we first formalize the input and ob-
jective. Then we provide a basic overview of the
RANSAC-based static mesh registration algorithm, as
needed to understand the last subsection, where our
registration algorithm for point cloud sequences will
be presented.
3.1 Input, Objective
The input data consist of two sequences P =
(P
1
, P
2
, ..., P
n
) and Q = (Q
1
, Q
2
, ..., Q
n
) of point
clouds P
i
= (p
i
1
, p
i
2
, ..., p
i
m
p
i
), Q
i
= (q
i
1
, q
i
2
, ..., q
i
m
q
i
),
where each point cloud (also called a frame) consists
of a set of points. Each p
i
j
and q
i
j
is a three com-
ponent vector of the Cartesian coordinates of the j-th
point of the i-th frame of P and Q , respectively. Both
P and Q have the same number n of frames, but each
frame in P and Q has a potentially different number
of points m
p
i
and m
q
i
, respectively.
The sequences are synchronized, i.e., each Q
i
has
been captured at the same time instant as P
i
; how-
ever, each has been captured by a different depth sen-
sor, and thus each captures a different portion of the
scene, and crucially, each set of points is represented
in a local coordinate frame of its depth sensor. There-
fore, even though large parts of the scene are captured
in both sequences (although not necessarily in all the
frames), these overlapping parts are not aligned. The
objective is to find a single rigid transformation T , s.t.
when applied to each frame Q
i
, i.e., to all of its ver-
tices, it produces a transformed frame T (Q
i
), where
the areas of captured overlap coincide with their coun-
terpart in P
i
.
3.2 Registration of Static Meshes
A general framework for Random Sample Consensus
(RANSAC) registration of static meshes has been pro-
posed by (Hruda et al., 2019). Our registration algo-
rithm builds on the concepts used in their work, and
therefore we review the most important steps of their
approach here. For a detailed description and justifi-
cation of each step, please refer to the original paper.
The objective is similar to that outlined in the pre-
vious section, only this time working with a pair of
meshes P and Q: the task is to find a transforma-
tion T , s.t. T (Q) brings overlap in Q into alignment
with corresponding parts of P. First, surface normals
are estimated for all vertices of P and Q. The algo-
rithm then continues by sampling both input meshes
on a quasi-regular grid. A set of surface samples on
P is built, covering its surface uniformly. For each
sample point, the principal curvatures are estimated
and stored, together with the first principal curvature
direction.
Next, Q is sampled in a similar fashion. For each
sample q
s
on Q, the principal curvatures are estimated
as well, and the most similar point p
s
in the set of sam-
ples from P in terms of curvature estimates is found
using a KD-tree data structure. Having a point on Q
and a potentially corresponding point on P, it is pos-
sible to build a pair of candidate transformations T
+
c
and T
−
c
by building the unique pair of rigid transfor-
mations such that
1. T (q
s
) = p
s
,
2. the transformed normal of q
s
aligns with the nor-
mal of p
s
,
3. the transformed first principal curvature direction
of q
s
aligns with the first principal curvature di-
rection of p
s
(for T
+
c
) or its opposite direction (for
T
−
c
).
By sampling the vertices of the mesh Q, a set of
predefined size (10 000 by default) of such candi-
date transformations is built, where each transforma-
tion must pass a verification test: a subsampled ver-
sion of the mesh Q is transformed by each T
c
, and
the size of the resulting overlap is estimated by eval-
uating the proportion of vertices of T
c
(Q), which lie
in close proximity to vertices of the mesh P. The re-
quired proximity and the ratio required to pass the test
are also configurable parameters.
The key observation for the final step of the al-
gorithm is that in the set of candidate transforma-
tions, many are wrong; however, many others are
close to the correct solution. These transformations,
in turn, form a high-density cluster in the 6D space
of rigid transformations, in which all the candidate
transformations live. The key ingredient required for
finding this density peak is an appropriate notion of
transformation similarity. Hruda et al. discuss vari-
ous choices and conclude that transformation distance
cannot be evaluated without taking into account the
data on which the transformations are applied. For
the application at hand, it is straightforward that the
transformations are applied to the vertices of Q, and
thus the difference (i.e., dissimilarity, distance) of two
candidate transformations T
1
and T
2
can be expressed
as:
d(T
1
, T
2
) =
1
m
Q
m
Q
∑
i=0
∥T
1
(q
i
) − T
2
(q
i
)∥, (1)
where m
Q
is the number of vertices in Q and q
i
are
the vertices of Q. Even though this formulation of the
distance seems to require evaluating a sum over all
the vertices of Q (i.e., linear complexity w.r.t. m
Q
), it
Automatic Registration of 3D Point Cloud Sequences
263

can be shown that with pre-processing, this distance
can, in fact, be evaluated in constant time (see (Hruda
et al., 2019) for details), and thus it can be evalu-
ated repeatedly without affecting the overall runtime
of the algorithm dramatically, even for complex input
meshes P and Q.
Having the notion of distance, it is finally easy
to estimate the density of the set of candidate trans-
formations around a particular candidate as a sum of
gaussians:
ρ(T
c
) =
∑
T
i
∈T
exp(−(σ d(T
c
, T
i
))
2
), (2)
where T is the set of all constructed candidate trans-
formations, and σ is a user-specified parameter that
controls the smoothness of the estimated density func-
tion. The candidate with the largest ρ(T
c
) is finally
selected as the solution to the problem.
This algorithm, initially designed for aligning
static meshes, could be adapted for dynamic point
clouds by applying it to individual frames. In fact,
any other method for static mesh registration can be
used this way. However, this results in a sequence of
diverse solutions rather than a single answer. Using
transformation blending to merge single-frame align-
ing transformations poses challenges, including po-
tential difficulties in registering some frames and the
risk of outliers affecting the overall alignment accu-
racy. Instead, we propose modifying the registration
algorithm to naturally accept two sequences of point
clouds, considering all frames and ensuring simulta-
neous alignment while diminishing the influence of
frames with insufficient reliable information. We con-
tend that the algorithm by Hruda et al. is well-suited
for this extension. The subsequent subsection pro-
vides a detailed description of this extension.
3.3 Registration of Dynamic Point
Clouds
There are two main differences between the original
method and the one we are proposing here. First,
we are working with point clouds instead of triangle
meshes, and second, the inputs are sequences instead
of just one frame. The first change mainly affects
the estimation of normals and curvatures, whereas the
second one affects major parts of the algorithm, such
as the accumulation of candidates, their verification,
and the identification of the final solution.
3.3.1 Estimation of Normals
In our algorithm, we estimate normals in point clouds
by fitting the points nearest to a given point with
a plane in the least squares sense, declaring the
plane’s normal as the estimated normal at that point.
A KD-tree structure is employed for finding a set of
closest points, with a dynamic radius adjustment to
address non-uniform point distribution - the KD-tree
searches for the points in a given radius, and if the
number of points found does not fit in a preset inter-
val, the radius is modified. Isolated points are dis-
carded, and for non-isolated ones, the normal is cal-
culated as the least squares fit to the vectors from each
neighbor to the centroid. To ensure consistent orien-
tation, normals pointing away from the camera are
flipped based on the relationship n · p < 0, where n
is the normal and p is vector of point coordinates in
the coordinate system of the device.
For the experiments presented below, we required
between 15 to 30 neighboring points, starting with an
initial search radius of 8mm. If more points than 30 is
found, then the radius is reduced by multiplication by
0.8. Should the opposite case occur, with fewer than
15 points found, the radius is multiplied by 1.2. If
a distance of 300mm is reached, and fewer than three
points were found, the point is considered isolated.
These constants were found experimentally for our
data. Since the radius from previous successful search
is used in each subsequent search, the normal estima-
tion involves only 1.09 KD-tree queries per vertex on
average.
3.3.2 Estimation of Curvature
For curvature estimation, the KD-tree structure re-
places the original breadth-first-search of connectivity
in (Hruda et al., 2019) for finding the closest points
around the investigated one. The search runs with
a fixed radius, crucial for consistent curvature estima-
tion, which can be set based on data character. In the
local point cloud, which consists of the nearest points
found, a basis aligned with normal/tangent directions
is built, and curvatures are estimated using a 2x2 sym-
metric matrix. Using a Gaussian kernel, weights re-
flecting neighbor distances are assigned to each point,
with the center having the weight of 1.
The eigenvalues of the constructed matrix repre-
sent principal curvatures, with eigenvectors indicat-
ing principal curvature directions in the tangential
plane. Converting eigenvectors into local coordinates
provides principal curvature directions in the model
space.
After estimating point cloud normals and sam-
pling data, candidate transformations are built for
each corresponding frame pair and are later pooled
into a single set of candidate transformations. Unlike
the original method, our algorithm skips the verifi-
cation test to avoid excessive memory requirements.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
264
Instead, we propose curvature-based filtering. Differ-
ences in curvatures between corresponding points are
stored, and candidates are filtered based on this score:
a certain percentage of candidates where the differ-
ence is highest is discarded from further processing.
This approach improves computational efficiency and
robustnes of the algorithm.
The transformation between input sequences is
found as the density peak in the space of candidate
transformations. This flexible approach works on se-
quences or single frame pairs, and on point clouds
or meshes. Evaluating candidate transformation dis-
similarity (Eq. 1) considers the entire sequence Q
rather than a single frame. This only affects the pre-
processing phase, with the actual evaluation of trans-
formation dissimilarity independent of frame count or
point density in the frames.
4 EXPERIMENTAL RESULTS
We have tested the proposed algorithm on a set of re-
alistic data, acquired by a pair of depth cameras. In
section 4.1, we describe the character of the test data,
and in section 4.2, we describe the quantitative results
of our experiments.
4.1 Data Acquisition
The objective of registering dynamic point clouds
originates from a rehabilitation application designed
for multiple sclerosis patients. In this virtual reality
therapy, patients, wearing HTC Vive headsets, are im-
mersed in a virtual environment without visual cues
from the real world. The goal is to provide a 3D ani-
mation of therapists movements, enhancing the exer-
cise experience.
Two Microsoft Kinect for Azure devices were
chosen for recording due to their affordability and
synchronization capabilities. Operating in depth
mode with a resolution of 640x526 points and 30
frames per second, these devices capture depth maps,
converted into point clouds using the Kinect for
Azure SDK. Synchronization between the devices is
achieved using a 3.5mm jack cable, ensuring tempo-
ral alignment of recorded scenes. The synchronized
sequences are saved as *.obj files for further process-
ing.
For the testing of our algorithm, we recorded sev-
eral scenes. In each case, we attempted to achieve
a certain known relative position of the sensors; how-
ever, due to the limited precision of manual placement
of the devices, this was likely achieved only approxi-
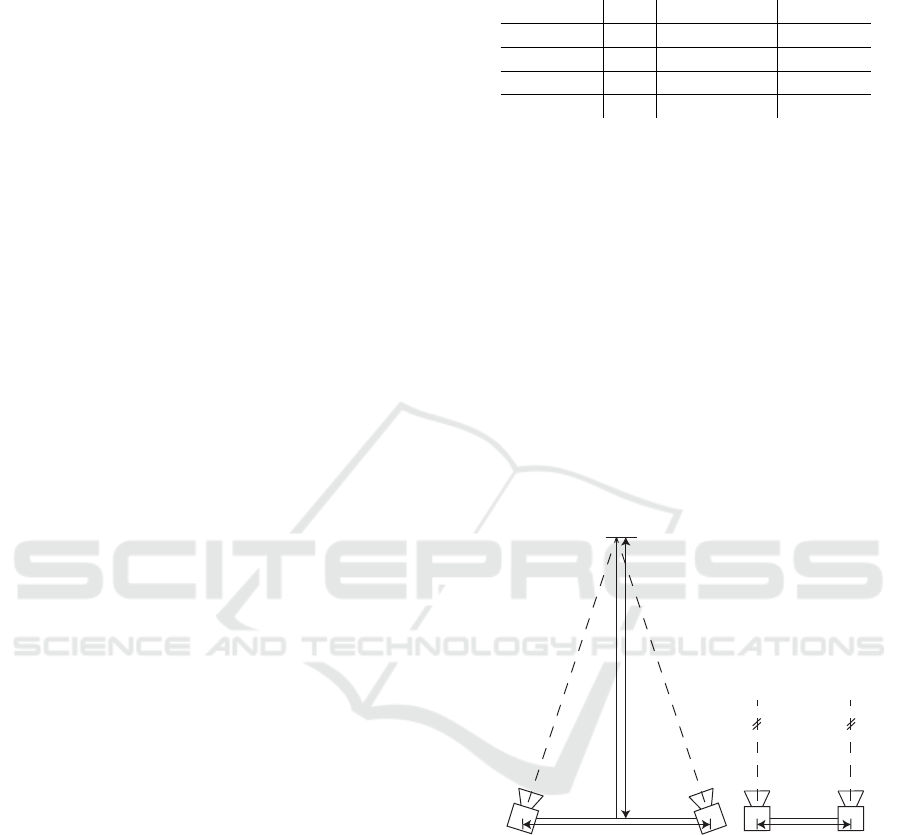
mately. The following datasets were acquired:
Table 1: Frame counts (#F) and average point counts (#P)
of the used datasets.
dataset #F #P principal #P agent
static 351 261942 258726
left-diag 266 262508 260575
right-diag 247 261658 254731
translate 285 266432 261150
• static represents a scene without any actors. The
devices were placed 100 cm apart horizontally,
and both faced one point at a distance of 151.5cm
from the baseline.
• left-diag represents the left diagonal from PNF
methodology, using devices shifted by 100cm and
both facing one point distant 151.5cm.
• right-diag represents the right diagonal from PNF
methodology using devices shifted by 100cm and
both facing one point distant 151.5cm.
• translate represents the left PNF diagonal with
both devices facing the same direction with the
separation of devices by 50cm.
The configurations are also shown in Figure 1. The
frame counts and average point counts are listed in
Table 1.
principal
device
agent
device
100 cm
151.5 cm
principal
device
agent
device
50 cm
Figure 1: Configuration of devices used for acquisition of
test data. On the left, configuration used for the static, left-
diag and right-diag datasets, on the right the configuration
used for the translate dataset.
4.2 Experiments
To validate the proposed method, we utilised the de-
scribed datasets. Figure 2 illustrates a frame from
the left-diag dataset, showcasing both the source se-
quence (agent device) and the target sequence (princi-
pal device). Despite having information about the in-
tended relative placement of the two sensors used for
data acquisition, this information is only approximate
Automatic Registration of 3D Point Cloud Sequences
265

and cannot be treated as a ground truth transforma-
tion from one sensor to the other. We manually con-
structed the transformation based on measured dis-
tances between sensors and the object (see to Fig-
ure 1), denoted as design transformation. While this
transformation should closely match the true align-
ing transformation, imperfections arise due to impre-
cise manual measurements and potential internal bias
from the devices, resulting in an imperfect transfor-
mation upon visual evaluation.
Figure 2: Source (left) and target (right) data from the left-
diag dataset. The colours are kept the same for other pic-
tures so the source and target are distinguished.
Since the design transformation cannot be used to
determine the degree of correctness of the final com-
puted transformation, we have constructed a differ-
ent manual transformation and consider it our artifi-
cial ground truth. To build this transformation, we
have manually selected four matching points from
one frame pair and using the Kabsch algorithm, we
have constructed a transformation, which will be re-
ferred to as the manual transformation. To ensure
the manual transformation is as close to the ground
truth as possible, we have selected easily recognized
points - nose tip, fingertip of the left hand, right knee
and a knuckle of the right hand. These points are
shown in Figure 3. The result of merging the source
transformed by the manual transformation and the tar-
get is shown in Figure 4, and after visual assessment
we consider this transformation better than the design
transformation.
Figure 3: Points selected for the Kabsch algorithm are high-
lighted with red vectors. Easily recognized points were
chosen: nose tip, fingertip on the left hand, right knee and
a knuckle on the right hand (left-diag dataset, frame 210).
Figure 4: Source transformed by the manual transformation
compared to the target (left-diag dataset).
Several parameters influence the algorithm’s
speed and accuracy, measured as the difference be-
tween the computed transformation and the manual
transformation. To calculate this difference, we trans-
form a point cloud with both transformations and cal-
culate the mean distance between corresponding point
pairs for all the transformed vertices across all frames.
This in turn allows us to assign the final result a unit:
it can be interpreted as the average distance of each
point in each point cloud from its optimal position as
induced by the reference transformation.
The algorithm’s parameters include the number
of frames, the number of constructed candidates for
each frame, the percentage of candidates preserved
after filtering, the radius used for collecting neighbors
when estimating curvatures, and the shape parameter
for the Gaussian kernel used for weighting them in
Eq. 2.
We designed and run several experiments to prop-
erly set different parameters. One of them aimed to
determine the sufficient number of frames and candi-
date transformations that yield robust results without
incurring unnecessary computational overhead from
using the complete set of frames. Our objective was
to use the minimum number of candidate transfor-
mations for density calculation, selecting only a cer-
tain percentage of input frames to cancel out noise
in the data. Empirically, we have verified that a total
of 2 000 000 constructed candidate transformations, of
which 1% is preserved through filtering, leads to a ro-
bust registration for all our test datasets.
Finally, we have compared the transformation
computed using the parameters from the two previous
experiments to the manual transformation and visu-
ally assessed the resulting merge of the transformed
source with the target. Figure 5 illustrates the results
of the registration experiment across all datasets.
The remaining parameters were set as follows: We
selected 100 consecutive frames from the middle part
of the input sequence. In the case of the left-diag
dataset, these frames depict the actor’s arm moving ei-
ther up or down on the diagonal. Choosing the middle
part helped avoid static frames from both the begin-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
266
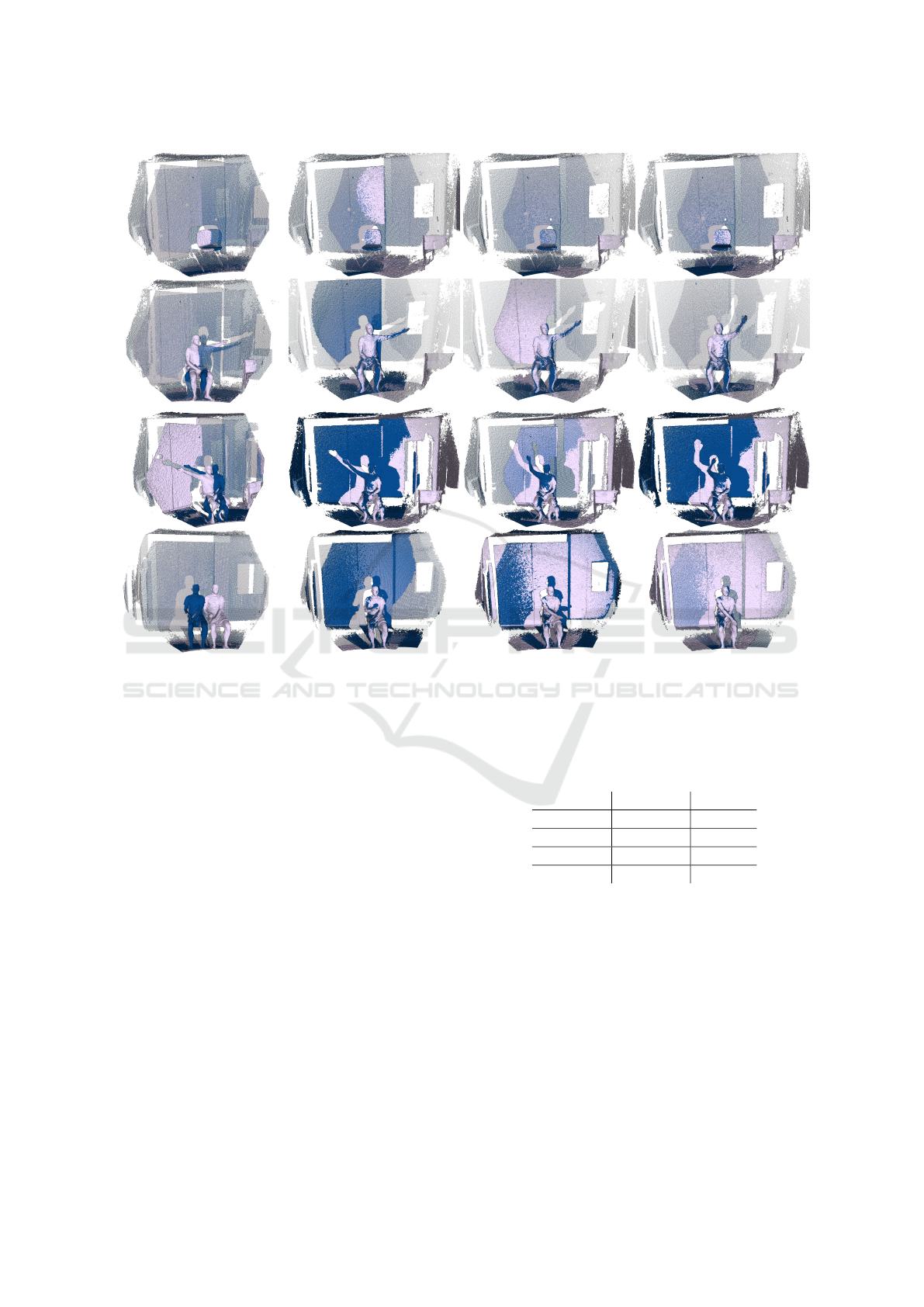
Figure 5: The results of the registration process for all datasets are presented, arranged from top to bottom as follows:
static, left-diagonal, right-diagonal, and translate. The leftmost column displays the original data without any modifications.
Subsequent columns present the source point cloud after the transformation together with the target point cloud. The frames
are displayed in their chronological order, with a 10-frame interval, to show visible changes between frames. Our registration
algorithm was applied to each dataset separately, yielding transformations from 100 frames of data.
ning and end of the sequence, ensuring that all frames
captured dynamic arm movement. To test the algo-
rithm’s robustness, data were not preprocessed, and
the noise, mainly in the background, remained part of
the original data without alterations.
The average difference between the resulting
transformation and the manual transformation, along
with the algorithm’s running times, is summarized
in Table 2. The performance has been measured on
a PC with AMD Ryzen 3950X CPU and 32GB of
RAM, using a reference implementation written in the
C# language. While optimizing the process is feasible
with a more performance-oriented programming lan-
guage, the current performance suffices for our prac-
tical application since registration is a one-time oper-
ation for each new exercise. It is worth noting that
differences in the order of centimeters can be con-
sidered successful, given the overall scale of the cap-
tured point clouds is in the order of several meters
and considering the overall level of noise produces by
Table 2: Differences from manual transformation (diff) and
computation times for all datasets.
dataset diff [mm] time [s]
static 45.37 165.9
left-diag 52.17 170.2
right-diag 120.73 175.4
translate 107.44 177.0
the sensors. Additionally, the manual transformation
may also have inherent biases w.r.t. the true aligning
transformation.
5 CONCLUSIONS
We have presented an algorithm for the automatic reg-
istration of point cloud sequences. This algorithm
builds on a specific static mesh registration algorithm
chosen for its beneficial properties. Notably, it en-
ables us to elegantly incorporate information from all
Automatic Registration of 3D Point Cloud Sequences
267

frames, constructing and filtering a global pool of can-
didate transformations. In this pool, the final, single
solution is determined by identifying the density peak
in the space of rigid transformations. The distance
metric used is derived from the knowledge of the en-
tire dataset undergoing transformation – in our case,
it is the set of all points from all input frames.
The algorithm delivers robust results, even when
applied to noisy data acquired by current consumer-
grade depth sensors. Specifically, we have used the
algorithm to align four sequences captured with a pair
of Microsoft Kinect for Azure devices. In each in-
stance, the resulting transformation closely matched
the expected result, offering visually superior results
compared to aligning the data based on the relative
placement information of the input devices.
In the future, we intend to explore more advanced
local shape descriptors than those used in this work.
Enhancing our understanding of local shape matching
could result in improved candidate transformation fil-
tering, leading to a faster and more reliable algorithm.
A reference implementation of the proposed
registration tool is available for download at
https://github.com/natvitova/DynamicRegistration.
ACKNOWLEDGEMENTS
This work was supported by the project 20-02154S
of the Czech Science Foundation. Nat
´
alie V
´
ıtov
´
a
and Jakub Frank were partially supported by the Uni-
versity specific research project SGS-2022-015, New
Methods for Medical, Spatial and Communication
Data. The work was partially carried out as part of
the study ”Virtual reality in the physiotherapy of mul-
tiple sclerosis” supported by GAUK 202322.
REFERENCES
Aiger, D., Mitra, N. J., and Cohen-Or, D. (2008). 4-points
congruent sets for robust surface registration. ACM
Transactions on Graphics, 27(3):#85, 1–10.
Bouaziz, S. and Pauly, M. (2013). Dynamic 2d/3d registra-
tion for the kinect. In ACM SIGGRAPH 2013 Courses,
SIGGRAPH ’13, New York, NY, USA. Association
for Computing Machinery.
Bouaziz, S., Tagliasacchi, A., and Pauly, M. (2013). Sparse
iterative closest point. In Proceedings of the Eleventh
Eurographics/ACMSIGGRAPH Symposium on Geom-
etry Processing, SGP ’13, page 113–123, Goslar,
DEU. Eurographics Association.
Castellani, U. and Bartoli, A. (2020). 3D Shape Registra-
tion, pages 353–411. Springer International Publish-
ing, Cham.
Chang, W. and Zwicker, M. (2008). Automatic registra-
tion for articulated shapes. Computer Graphics Fo-
rum, 27(5):1459–1468.
Eichler, N., Hel-Or, H., and Shimshoni, I. (2022). Spatio-
temporal calibration of multiple kinect cameras using
3d human pose. Sensors, 22(22).
Fornaser, A., Tomasin, P., De Cecco, M., Tavernini, M., and
Zanetti, M. (2017). Automatic graph based spatiotem-
poral extrinsic calibration of multiple kinect v2 tof
cameras. Robotics and Autonomous Systems, 98:105–
125.
He, H., Wang, H., and Sun, L. (2018). Research on 3d
point-cloud registration technology based on kinect v2
sensor. In 2018 Chinese Control And Decision Con-
ference (CCDC), pages 1264–1268.
Hruda, L., Dvo
ˇ
r
´
ak, J., and V
´
a
ˇ
sa, L. (2019). On evaluating
consensus in ransac surface registration. In Computer
Graphics Forum, volume 38, pages 175–186. Wiley
Online Library.
Kabsch, W. (1976). A solution for the best rotation to relate
two sets of vectors. Acta Crystallographica Section A:
Crystal Physics, Diffraction, Theoretical and General
Crystallography, 32(5):922–923.
Mellado, N., Aiger, D., and Mitra, N. J. (2014). Super 4pcs
fast global pointcloud registration via smart indexing.
Computer Graphics Forum, 33(5):205–215.
Mitra, N. J., Fl
¨
ory, S., Ovsjanikov, M., Gelfand, N., Guibas,
L., and Pottmann, H. (2007). Dynamic geometry reg-
istration. In Proceedings of the Fifth Eurographics
Symposium on Geometry Processing, SGP ’07, page
173–182, Goslar, DEU. Eurographics Association.
Moreira, R., Lial, L., Teles Monteiro, M. G., Arag
˜
ao, A.,
Santos David, L., Coertjens, M., Silva-J
´
unior, F. L.,
Dias, G., Velasques, B., Ribeiro, P., Teixeira, S. S.,
and Bastos, V. H. (2017). Diagonal movement of the
upper limb produces greater adaptive plasticity than
sagittal plane flexion in the shoulder. Neuroscience
Letters, 643:8–15.
Raposo, C., Barreto, J. P., and Nunes, U. (2013a). Fast
and accurate calibration of a kinect sensor. In 2013
International Conference on 3D Vision - 3DV 2013,
pages 342–349.
Raposo, C., Barreto, J. P., and Nunes, U. (2013b). Fast
and accurate calibration of a kinect sensor. In 2013
International Conference on 3D Vision - 3DV 2013,
pages 342–349.
Rusu, R. B., Blodow, N., and Beetz, M. (2009). Fast point
feature histograms (fpfh) for 3d registration. In Pro-
ceedings of the 2009 IEEE International Conference
on Robotics and Automation, ICRA’09, pages 1848–
1853, Piscataway, NJ, USA. IEEE Press.
Weber, T., H
¨
ansch, R., and Hellwich, O. (2015). Automatic
registration of unordered point clouds acquired by
kinect sensors using an overlap heuristic. ISPRS Jour-
nal of Photogrammetry and Remote Sensing, 102:96–
109.
Zhou, Q., Park, J., and Koltun, V. (2016). Fast global regis-
tration. In Computer Vision - ECCV 2016 - 14th Euro-
pean Conference, Amsterdam, The Netherlands, Octo-
ber 11-14, 2016, Proceedings, Part II, pages 766–782.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
268
