
Investigation of Heuristics for PIBT Solving Continuous MAPF Problem
in Narrow Warehouse
Toshihiro Matsui
a
Nagoya Institute of Technology, Gokiso-cho Showa-ku Nagoya Aichi 466-8555, Japan
Keywords:
Multiagent Pathfinding Problem, Multiagent Pickup-and-Delivery Problem, Continuous, Lifelong, PIBT,
Heuristics.
Abstract:
We address the heuristics based on map structures in a solution method for continuous multiagent path finding
problems particularly in the case of relatively narrow warehouse maps. The multiagent pathfinding problem
has been studied as a fundamental problem in multiagent systems, and the lifelong/continuous multiagent
pickup-and-delivery problem is a major extension of it that represents the tasks performed by robot carriers
in automated warehouses. While basic methods of multiagent pathfinding are generally aimed at resolving
collisions among agents using precisely computed/reserved paths or locally performed resolving algorithms,
there might also be opportunities to employ information of maps and traffic for the heuristics of solution
methods. As such an investigation, we focus on the case of multiagent pickup-and-delivery problems in narrow
warehouse environments and the solution method called Priority Inheritance with Backtracking (PIBT), which
is not based on the reservation of paths and is applicable to continuous problems within very narrow maps.
We experimentally investigate the effect of map settings and additional heuristics based on the structures of
maps.
1 INTRODUCTION
We address the heuristics based on map structures
in a solution method for continuous multiagent path
finding problems particularly in the case of relatively
narrow warehouse maps. The multiagent pathfind-
ing problem has been studied as a fundamental prob-
lem in multiagent systems where the (ideally) shortest
paths, which also avoid collisions, are simultaneously
found in a time-space graph. There are various ap-
plications of this problem including robot navigation,
autonomous taxiing of airplanes and video games;
here, we focus on the case of automated warehouses
that deploy robot carriers. This class of problems is
called the lifelong/continuous multiagent pickup-and-
delivery problem (Ma et al., 2017), which is an exten-
sion of continuous multiagent pathfinding problems.
In a typical system, each agent is repeatedly allocated
to one of tasks generated on demand and moves from
its current location to a delivery location via a pickup
location.
The problem consists of task allocation and mul-
tiagent pathfinding problems that are continuously
a
https://orcid.org/0000-0001-8557-8167
solved. While the task allocation can be solved as a
combinatorial optimization problems for static prob-
lems (Liu et al., 2019), greedy allocation methods are
often employed for continuous problems with tasks
generated on demand (Ma et al., 2017).
There are several solution methods for multiagent
pathfinding problems. A greedy approach repeat-
edly finds and allocates each agent’s collision-free
path in a predetermined order among agents using
the A* algorithm (Hart and Raphael, 1968; Hart and
Raphael, 1972) on a time-space graph (Silver, 2005).
A major exact solution method, called Conflict Based
Search (Sharon et al., 2015), performs two layers of
search, where collisions of agents are managed by a
tree-search in the high-level layer while a pathfind-
ing algorithm in the low-level layer is used to find a
conflict-free path for each agent. However, this ap-
proach is computationally expensive, and several ex-
tensions of efficient or approximation methods have
been proposed (Ma et al., 2019; Barer et al., 2014).
Several extended problems and solution methods have
also been proposed for more practical situations (Li
et al., 2021; Yamauchi et al., 2022; Miyashita et al.,
2023; Yakovlev and Andreychuk, 2017; Andreychuk
et al., 2022; Andreychuk et al., 2021).
Matsui, T.
Investigation of Heuristics for PIBT Solving Continuous MAPF Problem in Narrow Warehouse.
DOI: 10.5220/0012397900003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 341-350
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
341

In another type of greedy method, each agent de-
termines its next move in each time step by locally
solving collisions of agents’ moves. Priority Inher-
itance with Backtracking (PIBT) (Okumura et al.,
2022; Okumura et al., 2019) is classified into this
type of algorithms based on push-and-rotate opera-
tions (De Wilde et al., 2014; Luna and Bekris, 2011),
and it employs priorities of agents and a limited back-
tracking method in the process of resolving collisions.
Although it requires the relatively restricted condition
such that any vertex in a graph representing a floor
plan must be contained in cycles, this is generally ac-
ceptable in the case of warehouses.
While fundamental methods generally resolve
collisions among agents using precisely computed/re-
served paths or locally performed resolving algo-
rithms, there might also be opportunities to employ
information of maps and traffic for the heuristics of
solution methods. As such an investigation, we focus
on the case of multiagent pickup-and-delivery prob-
lems in narrow warehouse environments and the orig-
inal version of the solution method PIBT, which is
not based on the reservation of paths and is applica-
ble to continuous problems within very narrow maps.
We experimentally investigate the effect of map set-
tings and additional heuristics based on the structures
of maps.
In well controlled automated warehouses satisfy-
ing the solvable conditions of this kind of lightweight
MAPF algorithms, the low computational cost of the
solvers can be promising to develop real-time appli-
cations. As effective add-ons for such solvers, the
heuristic methods without exact searches/reservations
on time-space is also important.
The rest of the paper is organized as follows. In
the next section, we present the background of our
study, including multiagent pathfinding/pickup-and-
delivery problems, the solution method PIBT, and the
aim of this study. Then we present our proposed ap-
proaches in Section 3. We first briefly consider an
appropriate map settings in the case with sufficient
space. Then, for the case of narrow maps, we em-
ploy additional heuristics based on maps structures
and influential agents. We experimentally investigate
these approaches in Section 4 and conclude the paper
in Section 5.
2 PRELIMINARY
2.1 Multiagent Pathfinding Problem
The multiagent pathfinding (MAPF) problem is a fun-
damental problem for finding multiple agents’ move-
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
White: passageway. Black: shelf (obstacle). Light blue:
pickup/delivery location.
Figure 1: Example of grid-world warehouse map.
ment paths avoiding collisions in a time-space graph.
A problem consists of graph G = (V, E) representing
a two-dimensional map such as a warehouse or maze,
a set of agents A, and a set of start-goal pairs of ver-
tices to be allocated to the agents. Each agent has
its origin and destination vertices and should move
along its (ideally) shortest path avoiding other agents.
There are two cases of colliding paths, called ver-
tex and edge collisions. In a vertex collision, two
agents stay at the same location at the same time,
while in an edge collision, two agents move on the
same edge at the same time from both ends of the
edge. In a typical setting, a grid-like map contain-
ing obstacles and discrete time steps are employed.
There are several classes of solution methods includ-
ing the CA* algorithm (Silver, 2005), Conflict Based
Search (Sharon et al., 2015), and variants of push-
and-rotate approach (Okumura et al., 2022).
The continuous MAPF problem is an extended
class of the MAPF problems where each agent up-
dates its next goal after the agent moves to its current
goal. A solution method for MAPF is repeatedly per-
formed for the new paths.
2.2 Lifelong Multiagent
Pickup-and-Delivery Problem
The lifelong multiagent pickup-and-delivery (MAPD)
problem (Ma et al., 2017) is a class of continuous
MAPF problems, where multiple pickup-and-delivery
tasks in a warehouse or construction site are repeat-
edly allocated to agents. Figure 1 shows an example
of warehouse map. The tasks can appear at arbitrary
timings in a time span, and they are represented by
a set of currently generated pickup-and-delivery tasks
T . Task τ
i
∈ T has its pickup and delivery locations
(s
i
, g
i
), where s
i
, g
i
∈ V . After task τ
i
is allocated to
an agent, the agent moves from its current location
to a delivery location g
i
through a pickup location s
i
to complete the task. The problem can be decom-
posed into the task allocation and continuous MAPF
problems. While (continuous) MAPF solvers can be
applied to pathfinding, (partially) greedy approaches
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
342

1 UNDECIDED← A(t) // agents list
2 OCCUPIED←
/
0 // vertices list
3 update priorities p
i
(t) for all agents a
i
4 while UNDECIDED̸=
/
0 do
5 let a be the agent with highest priority p(a) in
UNDECIDED
6 PIBT(a,⊥)
7 end while
9 function PIBT(a
i
,a
j
)
10 UNDECIDED←UNDECIDED\{a
i
}
11 C
i
← ({v|(v
i
(t), v) ∈ E}∪ {v
i
(t)})
12 \({v
j
(t)}∪OCCUPIED)
13 while C
i
̸=
/
0 do
14 v
∗
i
← arg max
v∈C
i
f
i
(v) // most preferred move
15 OCCUPIED←OCCUPIED∪{v
∗
i
}
16 if ∃a
k
∈UNDECIDED s.t. v
∗
i
= v
k
(t) then
17 if PIBT(a
k
,a
i
) is valid then
18 v
i
(t + 1) ← v
∗
i
19 return valid
20 else
21 C
i
← C
i
\OCCUPIED
22 end if
23 else
24 v
i
(t + 1) ← v
∗
i
25 return valid
26 end if
27 end while
28 v
i
(t + 1) ← v
i
(t)
29 return invalid
30 end function
v
i
(t): location of agent a
i
at time step t
Figure 2: PIBT (Okumura et al., 2022) at time step t.
are commonly employed to allocate tasks generated
on demand.
A fundamental approach is based on the well-
formed MAPD problems that take into account end-
point vertices, which can be pickup, delivery, or park-
ing locations of agents (
ˇ
C
´
ap et al., 2015; Ma et al.,
2017). In this approach, tasks can be greedily al-
located under several rules, and their paths are also
greedily reserved without deadlock situations. How-
ever, the paths basically cannot contain endpoints,
except for start/goal vertices, and this requires extra
aisle space in warehouses. Moreover, the greedily re-
served paths have relatively large redundancy in the
parallel execution of tasks.
We focus on a different type of solution method,
PIBT (Okumura et al., 2022), as a continuous MAPF
solver that can be applied to narrow maps with dense
populations of agents. Since this method is also a
greedy approach, there is a different restriction as
mentioned below, but it is relatively acceptable in the
case of warehouses.
2.3 PIBT
PIBT (Okumura et al., 2022) is a solution method for
the (continuous) MAPF problem that can be consid-
ered a variant of the push-and-rotate approach. The
method employs relatively simple operations that in-
troduce the priority of agents and limited backtrack-
ing into the push-and-rotate process, and each agent
determines its next move at each time step (Fig. 2).
For continuous problems, each agent a
i
has its
list of subgoals and moves to the first subgoal, and
it also has a priority p(a
i
) based on the elapsed time
for the current subgoal and its name (for tie-break).
Each agent a with locally highest priority p(a) initi-
ates the process (line 6 in Fig. 2). An agent a
i
select
its most preferred move based on evaluation function
f
i
(line 14 in Fig. 2) and asks a neighboring agent on
a
i
’s shortest path to move if necessary (push) (lines
16 and 17 in Fig. 2). Here we simply define f
i
as the
distance from the current location of a
i
to its first sub-
goal and implement f
i
as a distance map that is com-
puted for the first subgoal. The pushed agent a
j
tries
to move to its neighboring vertex, and it also pushes
a
j
’s neighboring agent if necessary. If the all agents
obstructing agent a
i
can move, a chain of moves is
determined (line 18 in Fig. 2). Here, a pushed agent
in the chain may move into the current location of
the agent that initially pushes (rotation). If there is
no agent obstructing agent a
i
, its move is determined
(line 24 in Fig. 2).
If one of the (pushed) agents cannot move, back-
tracking is performed (line 29 in Fig. 2), and an agent
tries to push one of its other neighboring agents. This
search is limited, and an agent that cannot move stays
in its current location at the next time step (line 28 in
Fig. 2).
For all vertices v
i
and for all vertices v
j
neighbor-
ing v
i
, if the vertices v
i
and v
j
are contained in a cycle,
agents’ locations can be rotated through the cycle, and
PIBT can solve such a problem. Due to this condition,
the method cannot be applied to the maps with a dead
end. On the other hand, if the above condition is sat-
isfied, the method can work with narrow aisles and
dense populations of agents, even if all non-obstacle
vertices/cells are occupied by agents.
For MAPD problems, we employ a basic greedy
task allocation method where each idle agent selects a
task whose pickup location is nearest from its current
location.
2.4 Aim of Study
For MAPF problems, most of solution methods em-
ploy a pathfinding algorithm on time-space graphs
that computes individual agents’ paths, and the paths
are reserved even if a given situation can change.
Complete algorithms that resolve collisions among
agents require a relatively high computational cost,
while several greedy methods suffer from redundancy
Investigation of Heuristics for PIBT Solving Continuous MAPF Problem in Narrow Warehouse
343
in floor plans and sparse parallel execution of tasks.
These fundamental methods adjust individual agents’
paths without considering additional information of
map structures and traffic.
On the other hand, the solution methods based on
push-and-rotate operations are flexible for various sit-
uations, but there is global redundancy in the moves
of agents due to myopic planning. While previous
studies partially integrated pathfinding and reserva-
tion into PIBT to mitigate this drawback (Okumura
et al., 2019), there might be opportunities to investi-
gate several heuristics of agents’ moves and adjust-
ments of the maps themselves. We address this is-
sue in warehouse environments with narrow aisles. In
particular, we concentrate on the influence of map set-
tings and fundamental additional heuristics that might
be components to control relatively low-level solution
methods such as PIBT without precise reservation of
agent paths. Since it is not straightforward to grasp
such influences on a greedy solution method that is
affected by several biases, we experimentally investi-
gate a few properties as a first case study.
3 ADJUSTING MAP SETTINGS
AND APPLYING HEURISTICS
BASED ON MAP STRUCTURES
3.1 Limitation on Moves
A simple way to improve the control of agents is a
limitation on moves in maps. Here, conventional grid-
like maps represented with undirected graphs are re-
placed by directed graphs, and some edges are re-
moved to indicate lanes. There is no edge conflict on
such a directed edge, and the settings with directed
edges have been evaluated as easier example prob-
lems in previous studies with the time-space A* algo-
rithms (Li et al., 2021). This modification affects the
shortest paths to goals, and possible moves in push
operations in PIBT.
When there is relatively sufficient space in a floor
plan, setting pairs of opposite-direction lanes is intu-
itively reasonable. Each lane inhibits agents to move
in inverted directions but allows them to turn into an-
other lane. While such maps are effective in gen-
eral applications, they are particularly suitable to so-
lution methods such as PIBT that locally solves colli-
sions on demand. On the other hand, for the solution
methods based on endpoints, two lanes are necessary
for each aisle in addition to endpoint zones, particu-
larly in warehouse settings, and this space redundancy
may not be acceptable. Note that PIBT allows agents
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
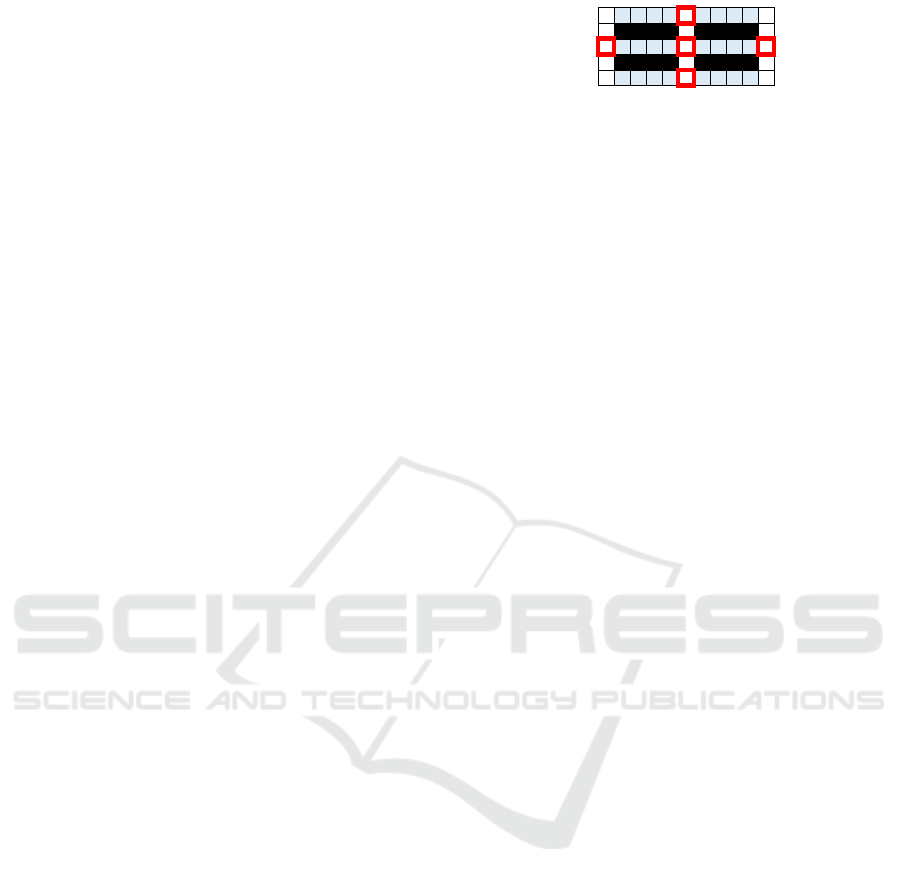
Non-obstacle cells with thick frames are intersections, and
other non-obstacle cells are aisles.
Figure 3: Map Structure.
to pass through pickup and delivery zones in ware-
houses, and the number of additionally required lanes
is relatively small. Therefore, we consider that a set-
ting using such opposite lanes is a promising solution
for improving the performance of PIBT for the cases
where relatively sufficient space is available.
In the case of narrow aisle cells whose width is a
single unit, one-way lanes can be introduced. How-
ever, such settings might be too restrictive on the
moves of agents in several situations, and thus there
are an incentive to analyze the effect of such one-way
lanes.
When designing maps with directed graphs, care
must be taken not to lose cycles for any vertex, and
satisfying this requirement might sometimes be com-
plicated.
3.2 Employing Knowledge of Map
Structure
In the following, we extract the map structure and em-
ploy that information for heuristics in PIBT. The non-
obstacle cells (vertices) in the narrow grid-like maps
are categorized into aisles and intersections (Fig. 3).
An aisle is a set of neighboring non-obstacle cells that
has two neighboring non-obstacle cells, while an in-
tersection is a single non-obstacle cell that has three
or four neighboring non-obstacle cells. For simplic-
ity, we assume that maps consist of narrow aisles
whose width is one, and whose intersections are sin-
gle cells. Such structures of simple warehouses can be
captured in relatively simple preprocessing or given
as additional attributes of maps. In our experiment,
the aisles and intersections were extracted from man-
ually labeled areas (for analysis) in a preprocessing by
considering the number of neighboring non-obstacle
cells, although those can be easily extracted without
such labels.
The aisles and intersections are managed as areas.
Each area has its basic information including its label,
type, set of contained cells, and set of cells neighbor-
ing its ends. Each non-obstacle cell also has a label of
its corresponding area, and the label is used for cross
reference.
We employ a shared information store that has the
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
344

.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
a
k
Circles: agents. Arrow: a part of an agent’s shortest path
to its goal. Dominant agent a
k
has highest priority p(a
k
)
within an aisle, and a neighboring intersection that is af-
fected by a
k
’s shortest path is identified.
Figure 4: Dominant agent in aisle.
information on map structures and agents related to
the parts of the structure. It is assumed that agents
access the shared information in a consistent order
and then update or refer to the information relevant
to them.
3.3 Managing Information of Dominant
Agent in Aisle
With the knowledge of map structure, we summarize
the information of agents in each aisle. Here, we fo-
cus on the agent that has the highest priority among
the agents in the same aisle and call it the dominant
agent in the aisle (Fig. 4). This is approximated infor-
mation, since the agent might not push other agents or
might be pushed by an agent outside of the aisle.
In addition to the name of the dominant agent, its
preferred move direction is computed and stored. Ac-
tually, the preferred direction is represented as a tem-
porary subgoal cell in relation to the current aisle.
When a dominant agent goes through the current
aisle, one of two neighboring intersections that has the
smaller distance value to the agent’s goal is selected.
On the other hand, when a dominant agent’s goal
is within the current aisle, the temporary subgoal cell
is selected as follows. When the dominant agent is in
its goal cell, the current cell is selected, and this in-
dicates that the agent will not push any other agents.
Otherwise, the direction from the dominant agent’s
current cell to its goal in the current aisle is computed,
and a neighboring intersection in that direction is se-
lected. Note that when an agent arrives at its goal cell,
its priority is reset. Therefore, such an agent is not the
dominant agent in most cases.
The information of the dominant agents is initial-
ized before the recursive process of PIBT (line 1 in
Fig. 6). It should also be updated in the process of
PIBT, since several agents’ next locations and pri-
orities are determined and reserved in this process.
When the next states of agents are determined, the
information on corresponding aisles are marked as
‘dirty’ (lines 20, 27 and 32 in Fig. 6) and recomputed
using the next states if necessary (line 15 in Fig. 6).
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
a
k
a
i
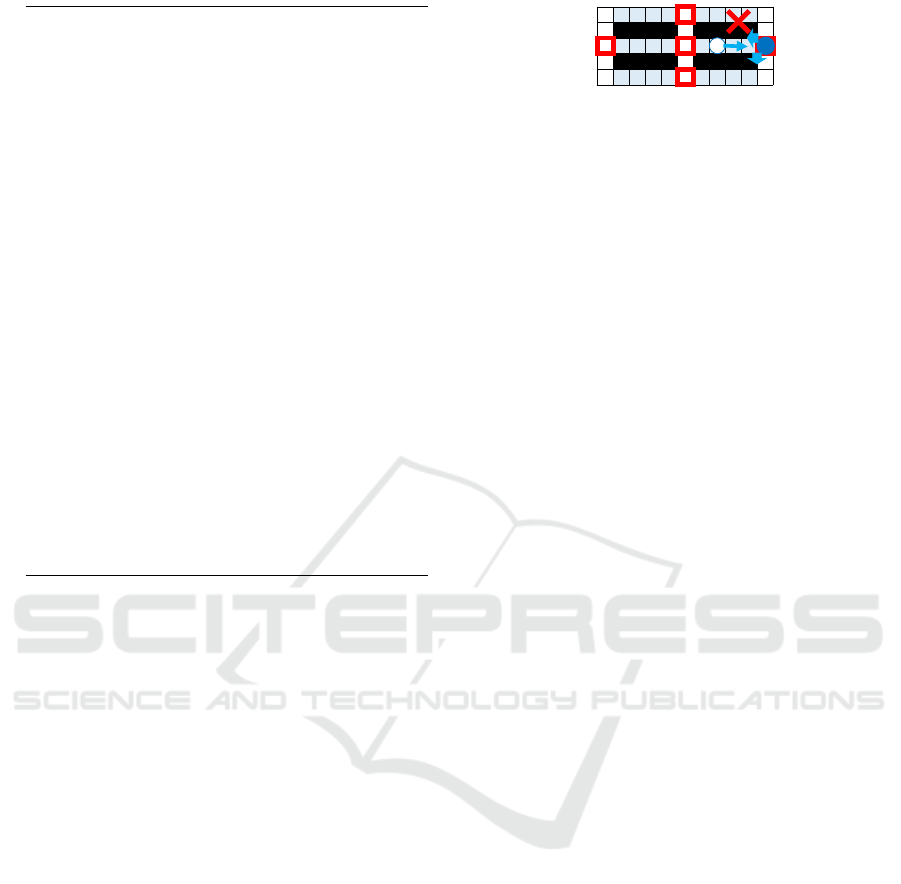
Agent a
i
should not be pushed into the path of first pushing
agent a
k
.
Figure 5: Replacement of agent’s location.
3.4 Direction Selection 1: Replacement
of Agents’ Locations
We employ the information on map structure to adjust
the direction selection of agents in the recursive pro-
cess of PIBT. Since agents cannot pass each other in
aisles in the case of narrow maps, the substantial se-
lection of moving direction is performed by the agents
at intersections.
An important interaction among agents is to re-
place the locations of agents going in opposite direc-
tions around an intersection (Fig. 5). For this opera-
tion, we extend the recursive process of PIBT so that
the information of the root (first pushing) agent a
k
in
the recursion is inherited in the process (lines 7, 10
and 18 in Fig. 6). When an agent a
i
at an intersec-
tion is pushed, the agent evaluates the preferred move
direction d
k
of the first pushing agent by referring to
the information of a
k
. Here, we assume that a default
tie-breaking order of moving direction is common to
all agents. If direction d
k
is the direction where the
distance from pushed agent a
i
to its goal increases,
a
i
’s preference value f
′
i
of direction d
k
is modified to
avoid the move to the direction (line 15 in Fig. 6).
Since we simply use distance values to a goal as the
preference values f
i
of directions, the distance value
for d
k
is temporally increased to a sufficiently large
value as follows.
f
′
i
(v, a
k
) =
∞ v is in direction d
k
.
f
i
(v) otherwise
(1)
By this modification, a pushed agent in an inter-
section will avoid a move where the agent is pushed
into the first pushing agent’s moving path.
Although other agents in a push chain might also
affect an agent pushed at an intersection, we focus
only on the initiator agent of the push chain as the
most influential one.
3.5 Direction Selection 2: Tie-Breaking
for Shortest Paths to Avoid
Dominant Agents
Another situation to be considered by an agent at
an intersection is the dominant agents in neighbor-
Investigation of Heuristics for PIBT Solving Continuous MAPF Problem in Narrow Warehouse
345
1 UpdateAislesInformation() // *1
2 UNDECIDED← A(t) // agents list
3 OCCUPIED←
/
0 // vertices list
4 update priorities p
i
(t) for all agents a
i
5 while UNDECIDED̸=
/
0 do
6 let a be the agent with highest priority p(a) in
UNDECIDED
7 PIBT(a,a,⊥) // *2
8 end while
10 function PIBT(a
r
,a
i
,a
j
) // *2
11 UNDECIDED←UNDECIDED\{a
i
}
12 C
i
← ({v|(v
i
(t), v) ∈ E}∪ {v
i
(t)})
13 \({v
j
(t)}∪OCCUPIED)
14 while C
i
̸=
/
0 do
15 v
∗
i
← arg max
v∈C
i
f
′
i
(v, a
r
) // most preferred move // *1, *2
16 OCCUPIED←OCCUPIED∪{v
∗
i
}
17 if ∃a
k
∈UNDECIDED s.t. v
∗
i
= v
k
(t) then
18 if PIBT(a
r
,a
k
,a
i
) is valid then // *2
19 v
i
(t + 1) ← v
∗
i
20 MarkUpdateOfAislesInformation() // *1
21 return valid
22 else
23 C
i
← C
i
\OCCUPIED
24 end if
25 else
26 v
i
(t + 1) ← v
∗
i
27 MarkUpdateOfAislesInformation() // *1
28 return valid
29 end if
30 end while
31 v
i
(t + 1) ← v
i
(t)
32 MarkUpdateOfAislesInformation() // *1
33 return invalid
34 end function
v
i
(t): location of agent a
i
at time step t
*1: information of dominant agents in aisles
*2: propagation of root (first pushing) agent
Figure 6: Extended PIBT at time step t.
ing aisles (Fig. 7). With the information of dominant
agents in aisles, each agent a
i
at an intersection eval-
uates their influences. When a neighboring aisle is
in the direction d
i,k
that decreases the distance to a
i
’s
goal, and the path of dominant agent a
k
(with a prior-
ity greater than a
i
) in the aisle contains the intersec-
tion of a
i
’s current location, dominant agent a
k
might
push back agent a
i
. In such a situation, the preference
value f
′
i
of direction d
i,k
is modified to weakly avoid
the move to that direction and to select another short-
est path in a different direction if one exists (line 15 in
Fig. 6). Here, the preference (distance) value for the
direction is slightly increased by adding a small value
less than unit distance so that priority value p(a
k
) of
dominant agent a
k
is taken into account as follows.
f
′
i
(v, ∗) =
f
i
(v) + w × p(a
k
) v is in direction d
i,k
.
f
i
(v) otherwise
(2)
Here, w is a sufficiently small coefficient value.
This weighting to the preference value for the di-
rection can be integrated with the modification of the
values to replace agents’ locations.
As an exception case, if the current goal of agent
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
a
k
a
i
g
i
Agent a
i
should not enter the aisle where dominant agent a
k
with higher priority is coming, and a direction on another
shortest path to goal g
i
should be selected.
Figure 7: Tie-breaking of shortest path.
a
i
at an intersection is within an aisle neighboring to
the intersection, agent a
i
enters to the goal aisle.
Note that this modification only affects the tie-
breaking among shortest paths, and rerouting the
agent to a detour requires an additional operation that
introduces new intermediate subgoals and different
distance computations. One the other hand, such a
rerouting approach requires precise information on
reserved paths of agents and might be ineffective,
particularly in maps with narrow aisles where other
agents are affected by such rerouting.
3.6 Limitation on Preference to Move
by Map Settings
Our major interest is the control of solution methods
using maps and related information, and we investi-
gate the effect of map settings that might be com-
plementary with the heuristics for solution methods.
As mentioned in Section 3.1, the agents’ moves can
be partially restricted using directed graphs, while a
modification must satisfy the condition of solvable
problems for PIBT. On the other hand, this limita-
tion can be separately applied to the maps used for
computing the shortest paths of agents, which only
requires the connectivity of directed graphs.
Since a fully automated optimization of such set-
tings needs various analyses, we experimentally com-
pare several heuristic settings that are manually set as
a first investigation. Because PIBT has the capability
to locally solve a conflict among agents, excessively
restrictive settings might be totally ineffective. This
also depends on the number of agents in the environ-
ment.
A basic approach loosely causes rotation moves
of agents by a partial restriction of their moves in the
map referenced for the computation of their shortest
paths. In addition, such a restriction distributes short-
est paths of several agents that have to avoid restricted
moves in several vertices.
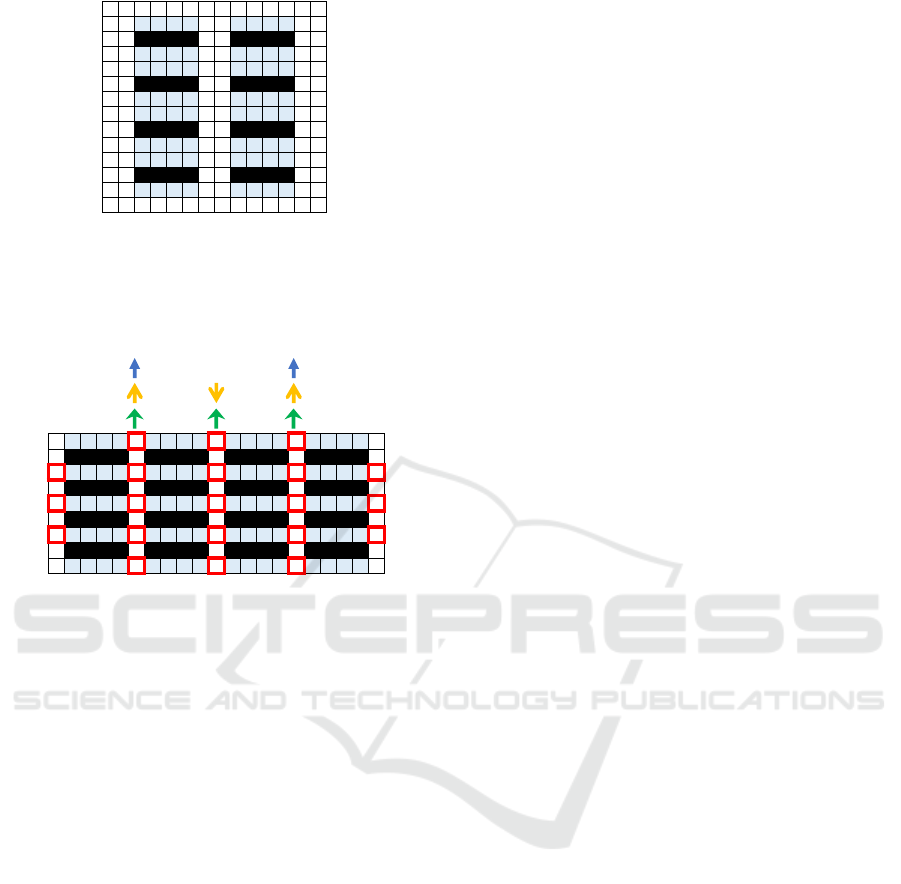
We select influential ‘streets’ in a map and set the
restriction on moves to them (Fig. 9). While there
are a number of possible selections, we choose sev-
eral combinations of vertical streets whose ends are
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
346
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
O
O
O
O
.
.
O
O
O
O
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
O
O
O
O
.
.
O
O
O
O
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
O
O
O
O
.
.
O
O
O
O
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
O
O
O
O
.
.
O
O
O
O
.
.
.
.
T
T
T
T
.
.
T
T
T
T
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
When opposite lanes are set, agents cannot move to back-
ward and must move on left-hand lanes, while they can
move to a neighboring opposite lane.
Figure 8: Relatively sparse map for opposite lanes.
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
O
O
O
O
.
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
T
T
T
T
.
Skip
Alternative
Uniform
Inverted move directions on several vertical streets are re-
stricted.
Figure 9: Map with narrow aisles.
the intersections with the top and bottom cells in a
map. Moreover, we investigate the cases where all
cells in the streets are restricted and the cases where
the restriction is only applied to intersections.
4 EVALUATION
Here, we report the experimental evaluation of our
proposed approaches.
4.1 Settings
We employed several maps that are modified ver-
sions of typical Kiva-like warehouse maps (Ma et al.,
2017), and they are narrowed by eliminating some
spaces. Figure 8 shows an example map for the case
with opposite lanes as mentioned in Section 3.1, and
Fig. 9 shows the case of narrower maps with aisles
whose width is a single unit. We varied the number
of agents up to the number of non-obstacle cells. For
MAPD problems, N pT tasks were randomly gener-
ated at every time step, up to 500 tasks in total.
We compared the following methods that were in-
crementally combined and applied to the case of nar-
row aisles maps.
• PIBT. Our baseline implementation of PIBT
based on the previous literature (Okumura et al.,
2022).
• DR. Modification of direction selection to re-
place locations of agents going opposite direc-
tions shown in Section 3.4.
• DA. Modification of direction selection to weakly
avoid an aisle in shortest paths where a dominant
agent is going in the opposite direction, as men-
tioned in Section 3.5.
For the limitation on moves in the maps referenced
in the computation of shortest paths as described in
Section 3.6, we compared several combinations of
one-way vertical streets in the map shown in Fig. 9,
as follows.
• Skip. Except for the first and last columns of
the map whose ends are parts of aisles, every
other vertical street are selected, and the down-
ward edges from the corresponding vertices are
removed.
• Alternative. Except for the first and last column
of the map, all vertical streets are selected, and the
downward or upward edges from the correspond-
ing vertices are removed. The directions of re-
moved edges are inverted for each selected street
alternatively.
• Uniform. Except for the first and last column of
the map, all vertical streets are selected, and, the
downward edges from the corresponding vertices
are removed.
In addition, the restriction is applied to all cells in-
cluding aisles and intersections (All) or only intersec-
tions (Int).
We evaluated makespan (MS), which is the time
steps to complete all tasks, and service time (ST) to
complete each task. The results over ten executions
with random initial locations of agents were averaged
for each problem instance. The experiments were per-
formed on a computer with g++ (GCC) 8.5.0 -O3,
Linux 4.18, Intel (R) Core (TM) i9-9900 CPU @ 3.10
GHz and 64 GB memory.
4.2 Results
Tables 1-4 show the results, where the minimum value
in each setting of (#agent, N pT ) is marked in bold.
Table 1 shows the cases with/without opposite
lanes. We can confirm that the setting of lanes re-
duced time steps for agent moves in most cases. In the
Investigation of Heuristics for PIBT Solving Continuous MAPF Problem in Narrow Warehouse
347
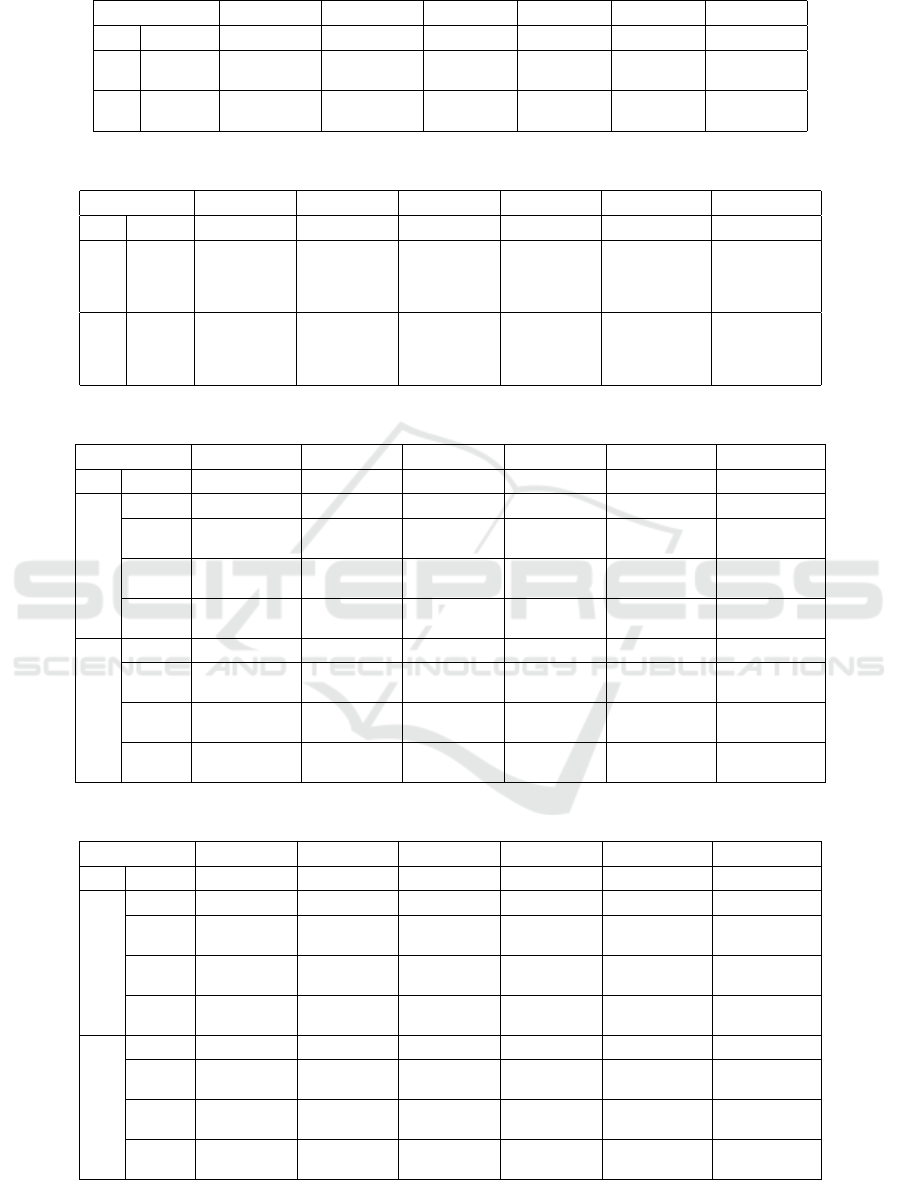
Table 1: Two opposite lanes (PIBT).
#agent 10 30 60 90 120 150
N pT prb. MS ST MS ST MS ST MS ST MS ST MS ST
1 no limit 654.3 76.7 529.2 24.2 530.4 24.8 534.2 28.8 545.3 39.2 576 61.4
opp. lanes 644.1 73.3 524.2 21.7 524.8 24.3 527 25.9 533.5 29.7 539.7 35.8
10 no limit 633.4 279.9 287.6 113.4 222.4 82.1 213.8 81.7 247.6 94.7 305.9 125.3
opp. lanes 615.9 270.2 247.8 94.9 183.2 64.7 176.1 60.8 184.6 63.9 200 72.1
Table 2: Narrow aisles (no restriction on moves in computation of shortest paths).
#agent 10 30 60 90 120 125
N pT alg. MS ST MS ST MS ST MS ST MS ST MS ST
1 PIBT 859.5 175.3 554.9 37.6 588.4 65.6 691.4 121.2 1040.8 297.4 1394.0 454.6
DR 801.4 144.9 543.2 34.4 575.6 61.1 635 107.2 1003.9 282.4 1412.2 457.5
DA 873.5 180.1 549.4 37.3 592.8 65.7 685.8 120.8 1018.1 290.3 1391.8 467.2
DR+DA 799.1 144.5 543 34.2 569.7 60.8 631 101.6 968.2 264.5 1366.9 436.7
10 PIBT 849.5 384.1 465.3 195.5 461.5 194.7 582.4 252.3 907.8 421.0 1281.2 576.1
DR 785.4 349.2 416.6 176.0 412.3 175.3 512.8 225.5 885.4 395.3 1256.7 553.5
DA 840.9 377.8 458.6 193.3 451.6 189.8 571.6 240.7 901.3 409.4 1274 572.5
DR+DA 779.1 345.6 418.7 175.7 410.8 175.0 500.4 221.9 870.2 397.4 1242.8 537.5
Table 3: Narrow aisles (restriction on moves in computation of shortest paths, PIBT).
#agent 10 30 60 90 120 125
N pT prb. MS ST MS ST MS ST MS ST MS ST MS ST
1 no limit 859.5 175.3 554.9 37.6 588.4 65.6 691.4 121.2 1040.8 297.4 1394 454.6
Skip-Int 864.8 175.0 553.7 37.1 589.3 65.4 688.7 124.5 1042.4 308.9 1396.3 463.6
Skip-All 934 208.7 579.3 49.0 606.5 72.1 710 128.4 1067.8 299.2 1375.7 435.0
Alt-Int 868.4 180.3 546.1 36.5 590.6 63.7 682.9 115.9 1028.1 295.9 1371 460.0
Alt-All 905.6 196.2 566.1 43.1 603.9 66.1 687.6 116.9 1042.3 284.9 1328.2 420.5
Uni-Int 922 204.3 552.3 38.4 576.3 60.0 660.3 109.9 1009.3 292.7 1425.9 480.6
Uni-All 1183.5 334.0 657.8 84.4 623.2 70.5 714.7 125.3 1046.1 286.0 1314.5 411.3
10 no limit 849.5 384.1 465.3 195.5 461.5 194.7 582.4 252.3 907.8 421.0 1281.2 576.1
Skip-Int 864.5 392.0 455.3 193.8 454.9 189.0 588.3 251.5 922.2 416.9 1288.8 582.1
Skip-All 934.8 428.7 527.9 228.4 502.1 212.0 618.3 263.9 942.9 415.2 1236.8 543.6
Alt-Int 859.2 387.6 444.1 189.0 431 180.8 571.9 245.0 916.8 416.6 1265.1 569.3
Alt-All 911.2 415.7 511.5 219.1 471.9 197.2 585.9 244.6 923.7 411.3 1266.8 549.4
Uni-Int 911.3 414.1 452.3 193.0 422.4 176.6 537 225.6 896.6 404.6 1291.4 581.3
Uni-All 1162 542.6 635.1 280.3 527.9 219.2 601.3 255.9 953.2 406.8 1230.8 539.3
Table 4: Narrow aisles (restriction on moves in computation of shortest paths, DR+DA).
#agent 10 30 60 90 120 125
N pT prb. MS ST MS ST MS ST MS ST MS ST MS ST
1 no limit 799.1 144.5 543 34.2 569.7 60.8 631 101.6 968.2 264.5 1366.9 436.7
Skip-Int 815.1 152.8 545.4 34.6 574.7 62.6 643.6 107.4 997 278.4 1361.9 438.6
Skip-All 819.2 154.9 541.3 35.9 576.3 63.6 643.9 110.7 1037.8 293.1 1457.5 464.6
Alt-Int 818.9 155.0 543.7 33.8 575.9 59.4 634 103.3 1003.2 276.8 1371.6 443.0
Alt-All 820 155.2 545 34.1 575.6 60.5 639.5 104.5 1046.1 288.4 1464.2 448.1
Uni-Int 870.6 176.8 543.5 34.3 573.9 56.8 622.8 96.3 990.3 270.1 1376.2 446.9
Uni-All 910.2 197.2 548.4 35.5 576.3 58.8 630.3 97.7 1097.5 297.7 1480 472.5
10 no limit 779.1 345.6 418.7 175.7 410.8 175.0 500.4 221.9 870.2 397.4 1242.8 537.5
Skip-Int 791.3 352.3 420.7 178.3 415.7 177.1 510.8 227.3 881.7 397.0 1232.8 539.3
Skip-All 797.9 357.7 427.2 178.8 424.9 181.4 514.2 230.8 917.2 401.5 1320.8 563.4
Alt-Int 797.7 357.1 412.2 173.7 394.5 168.7 506.1 226.8 873.5 394.0 1248.2 546.3
Alt-All 795.6 356.7 413 173.5 402.8 171.3 492.6 219.1 952.1 409.1 1352.5 563.2
Uni-Int 857.6 384.2 418.7 179.3 372.3 157.2 465.6 202.0 871.2 390.8 1234.9 540.4
Uni-All 890.7 402.3 433.3 185.4 383.7 158.8 477.6 208.2 955.1 408.9 1403 596.6
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
348

cases of relatively high concurrency of tasks (N pT =
10), and in the cases of dense populations of agents,
MS and ST were relatively reduced.
Table 2 shows the case of narrow aisles without
the restriction on moves in the computation of shortest
paths. The influence of heuristics for direction selec-
tion varied with the density of agents’ population. Ex-
cept very dense cases, DR was basically effective in
reducing MS and ST, while DA alone was often not so
effective. It revealed that the replacement of agents’
locations is a fundamental operation and more impor-
tant. On the other hand, the combination of them was
relatively effective in most cases. We found that these
local heuristics might disturb the process of original
solution method in several instances, while the results
were relatively better in average.
Table 3 shows the case of narrow aisles with a
restriction on moves in the computation of shortest
paths. There seems to be several complicated trade-
offs among different settings. While the comparison
between Skip and Alternative revealed that a suffi-
cient restriction is necessary to affect agents’ moves,
the restriction is often excessive in the cases of sparse
populations of agents. In most cases, Int that only
limit moves for intersection vertices reduced the time
steps than All. It revealed some trade-off between the
limitation/control of agents’ moves and the planning
of agents on demand. The combination of Uniform
and Int was relatively better than others except the
cases of sparse populations of agents. Different re-
strictions on agents’ moves might enforce different
rotation paths, and it can be effective according to sit-
uations, as low-cost heuristics.
The case of combinations of heuristics for direc-
tion selection and the restriction on agents’ moves in
the computation of shortest paths is shown in Tbl. 4.
Similar to the case without any restriction on agents’
moves, the additional heuristics for PIBT were rel-
atively effective where the population of agents is
not too dense, and both approaches were complemen-
tary. On the other hand, it was revealed that the com-
bined heuristics were ineffective with the effect of
map settings in very dense cases. In the dense cases,
a global control/limitation method of agents’ moves
is more important and the heuristics for local interac-
tions of among can be inconsistent with such a control
method. There might be opportunities to employ ded-
icated heuristics in agents’ interaction for the dense
cases.
With our experimental implementation, the com-
putation time was 0.24 and 0.26 seconds for PIBT
and DR+DA, in the case of N pT = 1 and 125 agents
shown in Tbl. 2.
5 CONCLUSION
In developing methods that employ certain informa-
tion of maps and traffic as the heuristics to con-
trol low-level solution methods for continuous multi-
agent pathfinding/pickup-and-delivery problems, we
focused on the case of such problems in narrow ware-
house environments and the solution method PIBT.
For this case study, we experimentally investigated
the effect of map settings and additional heuristics
based on the structures of maps. The experimental
results reveal the potential to employing such funda-
mental components to improve the behavior of so-
lution methods, while the optimum combination of
such settings remains a future work. One possible
approach is using statistics and learning for cases of
several situations in environments. Although we ad-
dressed the static restriction on agents’ moves as a
first case study, methods to dynamically apply such
settings based on summarized information of agent
behaviors without precise reservation of agents’ paths
should also be included in future work. For real-
world applications, there are opportunities of several
extensions including those of PIBT itself in practi-
cal situations. In well controlled automated ware-
houses satisfying the solvable conditions of this kind
of lightweight MAPF algorithms, such an applica-
tion with effective add-ons including the proposed ap-
proaches can be promising.
ACKNOWLEDGEMENTS
This study was supported in part by The Public
Foundation of Chubu Science and Technology Center
(thirty-third grant for artificial intelligence research)
and JSPS KAKENHI Grant Number 22H03647.
REFERENCES
Andreychuk, A., Yakovlev, K., Boyarski, E., and Stern, R.
(2021). Improving Continuous-time Conflict Based
Search. In Proceedings of The Thirty-Fifth AAAI Con-
ference on Artificial Intelligence, volume 35, pages
11220–11227.
Andreychuk, A., Yakovlev, K., Surynek, P., Atzmon, D.,
and Stern, R. (2022). Multi-agent pathfinding with
continuous time. Artificial Intelligence, 305:103662.
Barer, M., Sharon, G., Stern, R., and Felner, A. (2014).
Suboptimal Variants of the Conflict-Based Search Al-
gorithm for the Multi-Agent Pathfinding Problem. In
Proceedings of the Annual Symposium on Combinato-
rial Search, pages 19–27.
Investigation of Heuristics for PIBT Solving Continuous MAPF Problem in Narrow Warehouse
349

De Wilde, B., Ter Mors, A. W., and Witteveen, C. (2014).
Push and rotate: A complete multi-agent pathfinding
algorithm. J. Artif. Int. Res., 51(1):443–492.
Hart, P., N. N. and Raphael, B. (1968). A formal basis
for the heuristic determination of minimum cost paths.
IEEE Trans. Syst. Science and Cybernetics, 4(2):100–
107.
Hart, P., N. N. and Raphael, B. (1972). Correction to ’a for-
mal basis for the heuristic determination of minimum-
cost paths’. SIGART Newsletter, (37):28–29.
Li, J., Tinka, A., Kiesel, S., Durham, J. W., Kumar, T. K. S.,
and Koenig, S. (2021). Lifelong Multi-Agent Path
Finding in Large-Scale Warehouses. In Proceedings
of the Thirty-Fifth AAAI Conference on Artificial In-
telligence, pages 11272–11281.
Liu, M., Ma, H., Li, J., and Koenig, S. (2019). Task and
Path Planning for Multi-Agent Pickup and Delivery.
In Proceedings of the Eighteenth International Con-
ference on Autonomous Agents and MultiAgent Sys-
tems, pages 1152–1160.
Luna, R. and Bekris, K. E. (2011). Push and swap: Fast
cooperative path-finding with completeness guaran-
tees. In Proceedings of the Twenty-Second Interna-
tional Joint Conference on Artificial Intelligence, vol-
ume 1, pages 294–300.
Ma, H., Harabor, D., Stuckey, P. J., Li, J., and Koenig, S.
(2019). Searching with consistent prioritization for
multi-agent path finding. In Proceedings of the Thirty-
Third AAAI Conference on Artificial Intelligence and
Thirty-First Innovative Applications of Artificial In-
telligence Conference and Ninth AAAI Symposium on
Educational Advances in Artificial Intelligence, pages
7643–7650.
Ma, H., Li, J., Kumar, T. S., and Koenig, S. (2017). Lifelong
Multi-Agent Path Finding for Online Pickup and De-
livery Tasks. In Proceedings of the Sixteenth Confer-
ence on Autonomous Agents and MultiAgent Systems,
pages 837–845.
Miyashita, Y., Yamauchi, T., and Sugawara, T. (2023). Dis-
tributed planning with asynchronous execution with
local navigation for multi-agent pickup and delivery
problem. In Proceedings of the Twenty-Second Inter-
national Conference on Autonomous Agents and Mul-
tiagent Systems, page 914–922.
Okumura, K., Machida, M., D
´
efago, X., and Tamura, Y.
(2022). Priority Inheritance with Backtracking for It-
erative Multi-Agent Path Finding. Artificial Intelli-
gence, 310.
Okumura, K., Tamura, Y., and D
´
efago, X. (2019). winPIBT:
Expanded Prioritized Algorithm for Iterative Multi-
agent Path Finding. CoRR, abs/1905.10149.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-Based Search for Optimal Multi-
Agent Pathfinding. Artificial Intelligence, 219:40–66.
Silver, D. (2005). Cooperative Pathfinding. pages 117–122.
ˇ
C
´
ap, M., Vok
ˇ
r
´
ınek, J., and Kleiner, A. (2015). Complete
Decentralized Method for On-Line Multi-Robot Tra-
jectory Planning in Well-Formed Infrastructures. In
Proceedings of the Twenty-Fifth International Confer-
ence on Automated Planning and Scheduling, pages
324–332.
Yakovlev, K. S. and Andreychuk, A. (2017). Any-angle
pathfinding for multiple agents based on SIPP al-
gorithm. In Proceedings of the Twenty-Seventh In-
ternational Conference on Automated Planning and
Scheduling, pages 586–593.
Yamauchi, T., Miyashita, Y., and Sugawara, T. (2022).
Standby-based deadlock avoidance method for multi-
agent pickup and delivery tasks. In Proceedings
of the Twenty-First International Conference on Au-
tonomous Agents and Multiagent Systems, pages
1427–1435.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
350
