
Evaluation of 3D Point Cloud Distances: A Comparative Study in
Multi-Point Cloud Fusion Environments
Ulugbek Alibekov, Vanessa Staderini, Geetha Ramachandran, Philipp Schneider
and Doris Antensteiner
AIT Austrian Institute of Technology, Vienna, Austria
Keywords:
Point Cloud Registration, Complex Shape Reconstruction, Industrial Inspection, Distance Metrics, 3D
Reconstruction.
Abstract:
In the domain of 3D shape reconstruction and metrology, the precise alignment and measurement of point
clouds is critical, especially within the context of industrial inspection where accuracy requirements are high.
This work addresses challenges stemming from intricate object properties, including complex geometries or
surfaces, resulting in diverse artefacts, holes, or sparse point clouds. We present a comprehensive evaluation of
point cloud measurement metrics on different object shapes and error patterns. We focus on the task of point
cloud evaluation of objects to assess their quality. This is achieved through the acquisition of partial point
clouds acquired from multiple perspectives. This is followed by a point cloud fusion process including an
initial alignment and a point cloud refinement step. We evaluate these point clouds with respect to a reference
sampled point cloud and mesh. In this work, we evaluate various point cloud metrics across experimentally
relevant scenarios like cloud density variations, different noise levels, and hole sizes on objects with different
geometries. We additionally show how the approach can be applied in industrial object evaluation.
1 INTRODUCTION
As the manufacturing industry advances, the demand
for high-quality products grows, which requires qual-
ity assurance aligning with the given product quality
standards. Quality checks at different steps of the pro-
duction line are essential, but automating this process
poses challenges due to complex 3D geometries and
surface structures as well as a multitude of different
possible defects that can be present (Su et al., 2021).
While manual inspection remains common, the rapid
development of 3D sensor technology enables auto-
matic and inline object inspection using point clouds.
For industrial inspection, the 3D object surface
can be reconstructed from several partial point clouds,
obtained through methods like laser scanning or pho-
togrammetry, where the chosen method can capture
the 3D geometry of the manufactured parts and possi-
bly small structures such as scratches or other surface
defects. Analyzing point cloud structures helps de-
tect deviations from the targeted object geometry (di-
mensional accuracy) and detect other manufacturing
imperfections (defects), but to this end, several chal-
lenges must be addressed (Huo et al., 2023).
To obtain a complete point cloud of the ob-
Figure 1: Overview of our point cloud measuring process.
First, we acquire partial scans that are aligned only via the
system calibration. Second, a filtering process and a refined
multi-point registration process leads to a merged point
cloud. Third, we measure the distance between our scanned
point cloud and the ground truth (e.g., CAD model).
ject, scanning from multiple viewpoints is necessary,
where several partial point clouds are co-registered
and merged into one. The matching of partial point
clouds relies on an accurate co-registration between
partial point clouds. This issue can be addressed
through extrinsic calibration of the scanning setup to
reach a rough initial alignment, and the evaluation of
Alibekov, U., Staderini, V., Ramachandran, G., Schneider, P. and Antensteiner, D.
Evaluation of 3D Point Cloud Distances: A Comparative Study in Multi-Point Cloud Fusion Environments.
DOI: 10.5220/0012421300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
59-71
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
59

refined registration routines such as Global ICP (Glira
et al., 2015) or Pose Graph-based approaches (Choi
et al., 2015). Point cloud registration determines op-
timal transformations for global alignment, through
non-learning- (Yang et al., 2015) and learning-based
(Aoki et al., 2019) methods. The former are usually
based on applying an iterative optimization algorithm
to compute the rigid geometric transformation, while
learning-based approaches compute the transforma-
tion by extracting geometric features of the point
clouds. Existing research has predominantly focused
on large-scale scenes (e.g., SLAM (Kim et al., 2018)
and 3D scene reconstruction (Wang et al., 2023)).
After co-registration, the merged point cloud is
compared to a ground truth to assess the dimensional
accuracy and defects of the manufactured part. The
ground truth may be a mesh or a point cloud (e.g.,
from a CAD model or a highly precise reference
measurement). The analysis involves computing dis-
tances between object regions of the merged point
cloud and the reference ground truth (i.e., Cloud-to-
cloud or Cloud-to-mesh comparison), as described by
Sun and colleagues(Sun et al., 2023). However, this
task presents a challenge due to the unstructured na-
ture of point clouds, which lack a predefined order in
their data representation. While various methods for
Cloud-to-cloud Distance computation have been pro-
posed (Wu et al., 2021), a comprehensive analysis of
how these tools are affected by point cloud complex-
ity, noise, and cloud density is missing.
Our contributions encompass the following:
• Implementation of a comprehensive pipeline, in-
volving partial point clouds acquisition, merging,
and comparison to the object’s ground truth.
• Evaluation of several state-of-the-art point cloud
refinement techniques under various transforma-
tions such as translation and rotation.
• Thorough evaluation of metrics for measuring
cloud-to-cloud and cloud-to-mesh distances in di-
verse scenarios, including complex objects, ob-
jects with holes, and varying point cloud density.
2 RELATED WORK
2.1 Data Acquisition
Point clouds are commonly acquired through laser-
based or camera-based methods. In laser-based ap-
proaches, a sensor emits a beam towards the object,
and by measuring the time it takes for the light to re-
turn, the distance and 3D location where the laser hit
the object is determined (Wandinger, 2005).
Camera-based methods involve identifying dis-
tinctive points on the object’s surface and establish-
ing their correspondences in different images. For
example, active pattern projection projects structured
light patterns onto the object’s surface (Thorstensen
et al., 2021), deforming based on the object’s geome-
try. Captured by a camera, these patterns are then an-
alyzed. In stereo camera systems, two cameras with
a lateral separation (baseline) compute disparities be-
tween corresponding points in the two images, creat-
ing a 3D point cloud (Lee and Kweon, 2000). Multi-
view reconstruction integrates information from mul-
tiple 2D images, triangulating 3D positions for feature
matching across images, forming a point cloud (Seitz
et al., 2006).
2.2 Multi-Point Cloud Registration
2.2.1 Initial Alignment
In our real-world setup, the initial alignment of partial
point clouds relies on a well-calibrated scanning sys-
tem. In a robotic inspection setup, the end effector’s
position, carrying either the camera or the part to be
inspected, is known during calibration (Lattanzi and
Miller, 2017). However, over time, positional errors
accumulate due to inaccuracies in the motion axes of
the scanning system.
2.2.2 Classical Registration Methods
Many point cloud registration methods draw inspira-
tion from the iterative closest points (ICP) algorithm
by (Besl and McKay, 1992) and (Chen and Medioni,
1991). The ICP algorithm aims to achieve opti-
mal alignment or co-registration of overlapping point
clouds through a rigid-body transformation. The
ICP-based algorithm’s general pipeline, introduced
by (Rusinkiewicz and Levoy, 2001), consists of five
key stages: (i) selecting a subset of points within the
overlap area between two point clouds, and (ii) de-
termining the corresponding subset in the other point
cloud using the selected points; (iii) rejecting false
correspondences and (iv) determining a set of corre-
spondences with an associated set of weights; and (v)
estimating the (rigid-body) transformation by mini-
mizing the weighted and squared distances between
corresponding point, followed by applying the esti-
mated transformation. Challenges with the standard
ICP approach include the need for a good initial-
ization (pre-registration of partial point clouds) and
convergence to a local minimum. Another challenge
poses the pairwise matching between multiple point
clouds without a final overall adjustment step for the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
60

resulting merged point cloud, which leads to an accu-
mulating offset error.
Our work, based on a variant of the ICP algorithm
proposed by (Glira et al., 2015), focuses on match-
ing multiple point clouds (contrary to only pairwise
matching). Employing the original ICP algorithm
for matching points using k-d trees, the Global ICP
method introduces variations in strategies for select-
ing points in one point cloud (e.g. random or uni-
form sampling). Notably, Global ICP enables multi-
point cloud matching with a bundle adjustment step,
removing low-confidence correspondences based on
point distances or surface normal orientations. The
transformation parameters are estimated by minimiz-
ing the sum of the squared distances between cor-
respondences, applying a rigid affine transformation
(translation, rotation) to transform the point clouds.
By utilizing a single least squares optimization, it en-
sures that error propagation is handled correctly. Un-
like the traditional ICP, the proposed method works
well with large dataset, although, like any ICP-based
method, it depends on a good initial alignment.
Considered as an alternative, the pose Graph-
based approach proposed by (Choi et al., 2015) in-
volves creating a fully automatic geometric indoor
scene reconstruction pipeline from RGB-D video.
These scene fragments are connected into pose graph
where pose represent individual scene and edge con-
nects two nodes that overlap. The method registers
pairs of local scene fragments, constructing a global
model based on these alignments, with removal of
low-confidence pairs based on the point cloud den-
sity. Subsequently, ICP is applied for refinement, and
Pose Graph estimation yields the final global frag-
ment pose.
2.2.3 Learning-Based Registration Methods
A review of deep learning methods for point cloud
registration based on rigid transformations was con-
ducted by (Zhang et al., 2020). They noted that ex-
isting feature extraction methods are mostly adapted
from modules designed for tasks like point cloud clas-
sification or segmentation. Dedicated methods specif-
ically tailored for registration are underdeveloped.
A survey of non-rigid transformation and
learning-based point cloud registration methods
was conducted by (Monji-Azad et al., 2023).
These were categorized as correspondence-free or
correspondence-based methods. Correspondence-
free methods often grapple with differences in global
features between point sets, while correspondence-
based methods face challenges related to missing
correspondences.
Deep learning methods prove beneficial in solv-
ing the coarse registration problem by finding a coarse
initial transformation between two point clouds. They
excel in learning robust and distinct point feature
representations, particularly advantageous in scenar-
ios involving repetitive or symmetric scene elements,
weak geometric features (e.g. flat object), or low-
overlap scenarios (Sarode et al., 2019).
Deep learning methodology was not utilized in
our work due to the small transformations between
partial scans of a single object. Additionally, indus-
trial precision requirements favor traditional methods
(Brightman et al., 2023).
2.3 Cloud-to-Cloud Distance
Measurements
Point clouds function as representations of object sur-
faces, capturing spatial information. When com-
paring two point clouds, fundamental for evaluating
the dissimilarity or similarity, are distance measure-
ments. Cloud-to-cloud distance measurements can be
broadly categorized into two approaches: point-to-
point distance and point-to-plane distance.
2.3.1 Point-to-Point Distance
In the point-to-point distance approach, the Eu-
clidean distance between individual points in two
point clouds is computed. In this case, S
i
∈ R
k
i
×3
and
S
j
∈ R
k
j
×3
represent the two point sets, with k
i
, k
j
be-
ing the number of points of the respective clouds. In-
dividual points are shown as p
i
∈ S
i
, p
j
∈ S
j
, so that
p
i
, p
j
∈ R
3
. The distance between two points is cal-
culated as follows:
d(x, y) = |p
i
− p
j
|
2
. (1)
The nearest neighbour function D
NN
between
point p
i
and set S
j
then can be formulated as:
D
NN
(p
i
, S
j
) = min
p
j
∈S
j
d(p
i
, p
j
). (2)
Based on these definitions, common metrics for
point cloud distance computation using the point-to-
point method include:
Chamfer Distance - This metric computes the aver-
age sum of the squared distances for each point p
i
∈ S
i
to its nearest neighbour p
j
∈ S
j
(Wu et al., 2021):
D
CD
(S
i
, S
j
) =
1
k
i
∑
p
i
∈S
i
D
NN
(p
i
, S
j
)
2
+
1
k
j
∑
p
j
∈S j
D
NN
(p
j
, S
i
)
2
.
(3)
Evaluation of 3D Point Cloud Distances: A Comparative Study in Multi-Point Cloud Fusion Environments
61

Figure 2: Visualization of the least squares distance be-
tween point p
i
and point cloud S
j
. The blue plane rep-
resents the best fitting plane through the 6 nearest neigh-
bors p
j1
, p
j2
, p
j3
, p
j4
, p
j5
, p
j6
. The projection of the vector
from point p
i
and centroid g (mean value of nearest neigh-
bours) onto unit normal vector n depicts the distance D.
Hausdorff Distance - This metric calculates the max-
imum distance between any pair of nearest neigh-
bours between point clouds S
i
and S
j
(Huttenlocher
et al., 1993):
D
H
(S
i
, S
j
) =
max
max
p
i
∈S
i
D
NN
(p
i
, S
j
), max
p
j
∈S
j
D
NN
(p
j
, S
i
)
. (4)
Earth Mover’s Distance - This is also known as the
Wasserstein distance. For each point p
i
in S
i
, it relates
a separate and distinct point in S
j
(bijection, ξ), so that
the sum of distances between corresponding points is
minimal (Yuan et al., 2018):
D
EMD
(S
i
, S
j
) = min
ξ:S
i
→S
j
∑
p
i
∈S
i
|p
i
− ξ(p
i
)|
2
. (5)
Here, ξ represents a bijection. A function is bijec-
tive if, for every p
j
in S
i
, there exists exactly one p
i
such that ξ(p
i
) = p
j
(Koopman and Sportiche, 1982).
Both point clouds need the same number of points.
Computation of Earth Mover’s Distance (EMD) can
be quite resource-intensive and is typically used for
point clouds with a small to medium number of
points, typically around 5,000 or fewer (Fan et al.,
2017).
2.3.2 Point-to-Plane Distance
Another approach for computing the distance be-
tween two point clouds includes point-to-plane dis-
tance measurements. The distance from a point p
i
at
S
i
is calculated with respect to the best-fitting plane
at S
j
, created through k-nearest neighbours (Peterson,
2009) or a specified search radius. A projection of
the vector between point p
i
and the centroid g (the
mean value of the nearest neighbours at S
j
) is com-
puted with respect to the unit normal vector n, which
represents the distance between p
i
and S
j
(see Figure
2).
By knowing that k represents the count of the
closest points p
j1
, p
j2
, ... p
jk
to a given point p
i
, the
following distance measurements can be derived de-
pending on the fitting function.
Least Squares Method - This method finds the least
squares best fitting plane and computes the distance
from a point to that plane. The plane’s equation is
represented as follows:
λ
1
x + λ
2
y + λ
3
= z. (6)
It is solved for the coefficients λ
1
, λ
2
, λ
3
by using
a least squares method. The set of closest points
p
j1
, p
j2
, ... p
jk
is represented as:
p
j1
= x
j1
y
j1
z
j1
p
j2
= x
j2
y
j2
z
j2
.
.
.
p
jk
= x
jk
y
jk
z
jk
.
Values for a, b and c are calculated that approximate
the system of equations to find values for the follow-
ing equations:
λ
1
x
j1
+ λ
2
y
j1
+ λ
3
= z
j1
λ
1
x
j2
+ λ
2
y
j2
+ λ
3
= z
j2
.
.
.
λ
1
x
jk
+ λ
2
y
jk
+ λ
3
= z
jk
This system of equations can be represented in matrix
format as:
Ax = b, (7)
where A, x and b are:
A =
x
j1
y
j1
1
x
j2
y
j2
1
.
.
.
.
.
.
.
.
.
x
jk
y
jk
1
, x =
λ
1
λ
2
λ
3
, b =
z
j1
z
j2
.
.
.
z
jk
.
The goal is to solve for the coefficients of the best-
fitting plane using least squares regression (Mu
˜
noz
et al., 2014).
x =
A
T
· A
−1
· A
T
· b (8)
By solving for x, it is possible to obtain the coef-
ficients λ
1
, λ
2
, λ
3
. Next, we need to compute the gra-
dient of the function, denoted as ∇ f , which is repre-
sented by a vector consisting of the partial derivatives
of the function with respect to the x, y, z axes.
∇ f =
∇ f
x
∇ f
y
∇ f
z
. (9)
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
62
By normalizing it, we can obtain the normal vector n
that is perpendicular to the surface:
n =
∇ f
|∇ f |
(10)
In the case of the Least squares method, the nor-
mal vector will be equal to the coefficients λ
1
, λ
2
, λ
3
.
n =
λ
1
λ
2
λ
3
(11)
As a result, the least squares distance from the point
to the plane can be computed using the cross product:
D
LS
=
|p
i
g · n|
|n|
= |p
i
g · n|, (12)
where p
i
g is the vector from the point p
i
to the cen-
troid g (mean value of all nearest neighbour points)
and n the unit normal vector.
Quadric - This method creates a quadratic best-fitting
plane through the k closest points, and the distance is
calculated similarly to the Least squares method. The
function is given as follows:
λ
1
x
2
+ λ
2
x + λ
3
xy + λ
4
y + λ
5
y
2
+ λ
6
= z (13)
Therefore, the system of equations of the plane pass-
ing through a set of the closest points p
j1
, p
j2
, ... p
jk
will be:
λ
1
x
2
j1
+ λ
2
x
j1
+ λ
3
x
j1
y
j1
+ λ
4
y
j1
+ λ
5
y
2
j1
+ λ
6
= z
j1
λ
1
x
2
j2
+ λ
2
x
j2
+ λ
3
x
j2
y
j2
+ λ
4
y
j2
+ λ
5
y
2
j2
+ λ
6
= z
j2
···
λ
1
x
2
jk
+ λ
2
x
jk
+ λ
3
x
jk
y
jk
+ λ
4
y
jk
+ λ
5
y
2
jk
+ λ
6
= z
jk
By combining it into a matrix format similar to equa-
tion (7), it is possible to solve for x using the conju-
gate gradient optimization method (Nazareth, 2009).
This is an iterative optimization method starting with
an initial guess, where the solution is continuously re-
fined by computing step sizes and search directions
and subsequently checked for convergence. As a re-
sult, the coefficients λ
1
, λ
2
, λ
3
, λ
4
, λ
5
, λ
6
are de-
termined. Similar to equation (9), the gradient of the
function is calculated as follows:
∇ f =
∇ f
x
∇ f
y
∇ f
z
=
2λ
1
x + λ
2
+ λ
3
y
λ
4
x + 2λ
5
y
1
(14)
By considering the centroid point g (mean value
of nearest neighbour points) and inserting the x, y, z
values into equation (14), the normal vector can be
computed using equation (10). Finally, the distance
can be computed similarly to equation (12) as quadric
D
Q
.
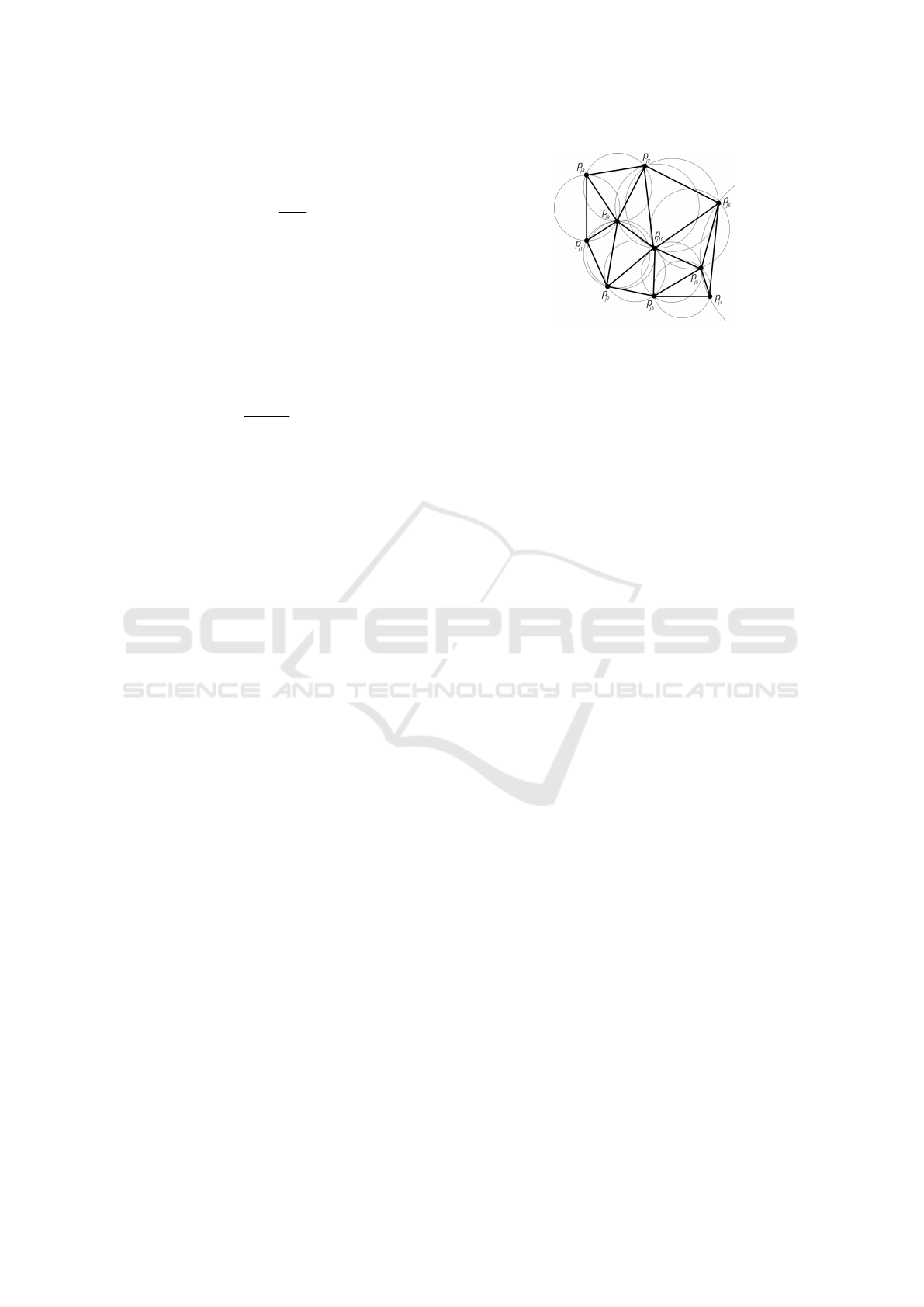
Figure 3: Visualization of the Delaunay triangulation for
ten points from a top view perspective. Each dot represents
a point of the point cloud. The Delaunay triangulation max-
imizes the minimum angle of all the angles of the triangles
so that no point is inside the circumcircle of any triangle.
2.5D Triangulation - In Delaunay triangula-
tion (Chen and Xu, 2004), the 2.5D means that the
points are projected onto best-fitting plane and 2D
triangulation is performed in this plane. Afterwards,
the algorithm forms triangles, and creates a 2.5D
mesh. The distance between a point and the 2.5D
mesh is computed by finding the closest triangle (see
Figure 3) and performing a point-to-plane distance
computation.
The original 3D points are used as vertices for the
mesh to create a 2.5D mesh. The distance between
a point to the 2.5D mesh is computed by finding the
closest triangle to the point and performing a point-
to-plane distance computation. As a result, the 2.5D
triangulation D
T RI
distance can be computed.
2.4 Cloud-to-Mesh Distance
Measurement
A mesh is a collection of vertices, edges, and faces
that define the shape of a 3D object. Usually, the
faces of the mesh are composed of triangles (triangle
mesh), quadrilaterals (quads), or other simple convex
polygons (n-gons) (Cobb et al., 2009). The Cloud-
to-mesh Distance D
C2M
is found in a similar way as
in Sec. 2.3.2, where the plane is represented by the
triangle of the mesh. If the orthogonal projection of
the point on this plane is outside of the triangle, then
the distance to the nearest edge is taken. Taking into
account the orientation of the normal vector, the cal-
culated distance is signed, indicating that the point is
considered outside the mesh when the distance is pos-
itive and inside when it is negative.(Jones, 1995).
3 METHODOLOGY
In this section, we outline our methodology, encom-
passing data generation, point cloud registration, and
Evaluation of 3D Point Cloud Distances: A Comparative Study in Multi-Point Cloud Fusion Environments
63

evaluation using various distance metrics.
To this end, we performed experiments on three
types of data: (i) we synthetically generated point
clouds with well-defined shapes (e.g., plane, slope,
sine wave, and triangular wave); (ii) simulated point
cloud acquisitions using ray tracing with a 3D mesh
of an object with a CAD model; and (iii) point clouds
obtained experimentally using a structured light sen-
sor and a precise kinematic setup.
Accurate point cloud registration was achieved by
an initial alignment step and further calibration and
refinement steps. Additionally, we present our evalu-
ation process involving diverse distance metrics.
3.1 Synthetic Data Generation of
Well-Defined Shapes
We generated meshes for four distinct shapes: plane,
slope, sinusoidal wave, and triangular wave. These
meshes represent different degrees of shape complex-
ity. The surface equations used in Blender are shown
in the following.
Plane: z = 0
Slope: z =
1
1 + ε
x
Sine wave: z = sin(2πx) + sin(2πy)
Triangular wave: z =
|
mod (x + y, 2) − 1
|
− 0.5
The shapes were subdivided into 16 segments or parts
along each axis. The subdivision tool of Blender al-
lows one to break down a bigger object into smaller
components creating a detailed mesh. Each object has
dimensions of 1 meter in both width and length, mak-
ing it comparable to real-world data in terms of size.
The generated meshes are displayed in the Figure 4.
3.2 Synthetic Data Generation of
Partial Scans
We utilized the 3D mesh of a rabbit (see Figure 5) to
synthesize a sensor capturing the object from various
viewpoints. To ensure comprehensive object cover-
age, we employed the method proposed in (Staderini
et al., 2023) based on Poisson disc sampling to deter-
mine optimal camera poses in terms of coverage. This
method was chosen for its simplicity of implementa-
tion and its ability to achieve extensive coverage with
only a small number of optimal views. To capture par-
tial scans of the object under inspection, we employed
ray tracing. The sensor model used had a resolution
of 1920 × 1200 pixels, a field of view (FOV) spanning
Figure 4: Different meshes used in this work (plane, slope,
sine wave, triangular wave). Each mesh shows a different
degree of shape complexity. The shapes from the top view
are squares. The meshes have been generated in Blender.
Figure 5: 3D mesh of the inspected object. This model was
adopted in our simulation and was used to 3D-print the ob-
ject on which real-world experiments (i.e., scanning) in the
lab were conducted.
38.70
◦
× 24.75
◦
, and a depth of field (DOF) between
350mm and 700 mm, ensuring consistency with the
parameters used in acquiring the experimental data in
the lab.
The synthetically generated (and therefore
aligned) partial scans were rigidly transformed to
establish ground truth transformations. This informa-
tion can later be used for the evaluation of registration
methods, where the estimated transformation matrix
is compared against the ground truth transformation.
Figure 6: Schematics of the hardware lab setup. 1 - moving
linear stage, 2 - rotating stage, 3 - tilt stage (goniometer), 4
- object that is being scanned, 5 - structured light sensor.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
64

3.3 Experimental Data Acquisition
For real-world point cloud acquisition in the lab, we
utilized a Zivid One+ S structured light sensor, to con-
duct experiments with a 3D-printed rabbit (Figure 5),
which matched the 3D mesh used in our simulations.
The model of the 3D printer is Stratasys F370 with
0.2 mm accuracy. We evaluated the Cloud-to-cloud
Distance metrics on our real-world point cloud acqui-
sitions. The camera-object poses were determined ac-
cording to the optimal viewpoint generation method
described in (Staderini et al., 2023). Our camera re-
mained stationary while the object had three degrees
of freedom on a precise kinematic setup involving a
linear axis, a rotary table, and a goniometer (see Fig-
ure 6). The moving linear stage moves in x-direction,
whereas the rotating stage and the goniometer enable
rotations along all spatial directions.
With our kinematic setup, we achieve a high ac-
quisition accuracy. On this account, we could use
the joint values of the kinematic setup and the extrin-
sic parameters of the camera to obtain a good initial
alignment of the acquired point clouds. Additionally,
we applied a pre-processing step to reduce outliers
and noise, where silhouette masking was employed
as described in (Rousseeuw, 1987). The ground truth
mesh model was positioned at the actual location of
the object, and points were removed, which were far-
ther away from the model than a certain threshold.
Afterwards, the point cloud density was computed.
Low-density regions were identified as noise and re-
moved.
3.4 Point Cloud Registration
3.4.1 Initial Alignment
For lab data acquisition, our experimental setup com-
prised a kinematic chain with a linear stage mov-
ing a rotating stage, with a tilt stage (see Figure
6). Multiple partial acquisitions from various view-
ing angles generated the point clouds. These partial
point clouds were co-registered, with the initial align-
ment achieved through forward kinematics utilizing
the three actuators. The initial joint positions were
saved, and for each joint, the travel between the cur-
rent and initial positions was calculated. Adjustments
to the rotating stage axis and tilt stage were made ac-
cordingly. To address orientation misalignment, the
object underwent rotations along the new tilt and ro-
tating stage axes. Correcting positional misalignment
caused by the linear stage movement involved trans-
lating the object along the linear stage axis in the in-
verse travel direction. The subsequent step involves
the refined registration of the partial point clouds.
(a) (b) (c)
Figure 7: Examples of a triangular wave with different
imperfections: (a) density/sparsity (with a defined den-
sity/sparsity level), (b) noise (with a defined standard de-
viation) and (c) hole (with a defined radius).
3.4.2 Refined Registration
We assessed the Global ICP and Pose Graph regis-
tration methods detailed in Sec. 2.2 using synthetic
data (see Sec. 3.2). After generating partial scans
from various viewpoints, initially six, then expanding
to ten, we systematically applied random transforma-
tions such as translation and rotation to them in order
to assess the registration performance.
3.5 Evaluation Using Distance Metrics
We evaluated various distance metrics, including
Chamfer, Hausdorff, Least Squares, Quadric, 2.5D
Triangulation and Cloud-to-Mesh. The Earth Mover’s
Distance was excluded due to its requirement of point
clouds with identical numbers of points.
Meshes (see Figure 4) were uniformly sampled
with 1000 points, and a cloned point cloud was shifted
above the original along the z-axis by 0.5 units (/me-
ters). Varied conditions, including sampling factor,
noise, and the introduction of a hole were applied to
this shifted point cloud.
The linear sampling number was set to vary the
shifted point cloud’s density from 0 to 1, where 0 rep-
resents the same density as the original point cloud,
and 1 indicates no points. The sampling number de-
cresed by 100 points at each 0.1 step. We introduced
normally distributed noise with a varying standard de-
viation (0.01 to 0.1 units, mean value of 0) and created
a hole by removing points within a circle centered at
the shifted point cloud’s centroid, with a radius vary-
ing from 0.1 to 1 units.
4 RESULTS
4.1 Comparison of Different
Registration Methods
We assessed registration methods using synthetic par-
tial scans (as detailed in Sec. 3.2) acquired from vary-
ing numbers of viewpoints, simulating our lab setup
Evaluation of 3D Point Cloud Distances: A Comparative Study in Multi-Point Cloud Fusion Environments
65
Average translation
Average rotation
(a) Global ICP.
0
2
4
6
8
10
12
14
0
2
4
6
8
10
12
14
Average translation
Average rotation
(b) Pose Graph.
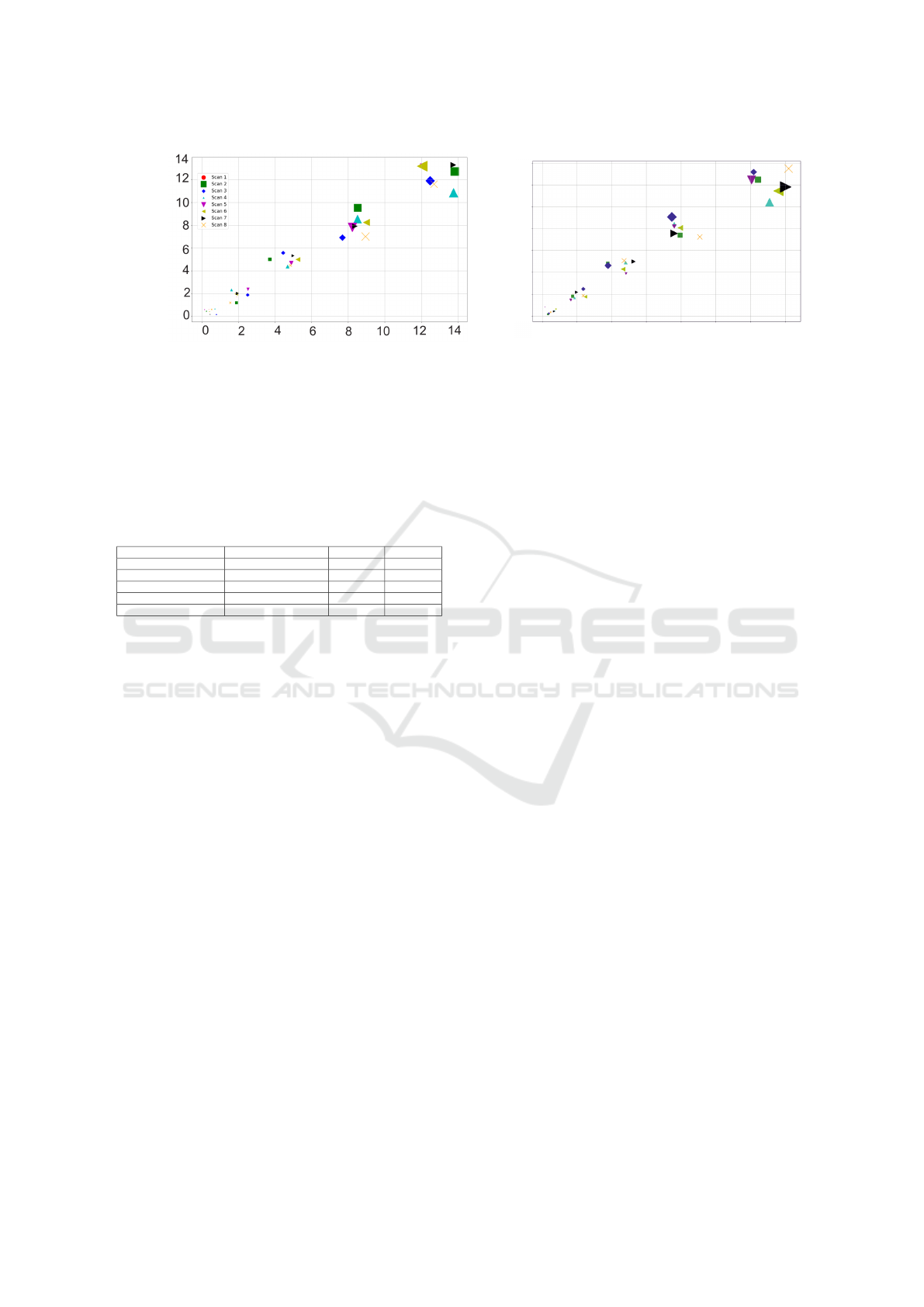
Figure 8: Evaluation of Global ICP and Pose Graph in terms of randomly applied rotations and translations to the partial scans
obtained from eight different viewpoints. Each coloured icon represents one partial scan. The size of the icon represents the
absolute mean error.
Table 1: Average absolute mean errors across eight point
cloud scans for Global ICP and Pose Graph registration
methods. The different configurations of point cloud scans
were retrieved based on arbitrary rotation and translation er-
rors in the ranges indicated in the table.
Rotation range (degrees) Translation range (mm) Global ICP Pose Graph
[0,1] [0,1] 0.0045 0.0352
[1,3] [1,3] 0.0416 0.0567
[3,6] [3,6] 0.1668 0.1718
[6,10] [6,10] 0.5482 0.5117
[10,15] [10,15] 0.5280 0.5789
shown in Figure 6. Random rotational and transla-
tional transformations (0 to 15 degrees and 0 to 15
mm) were applied. Global ICP and Pose Graph meth-
ods (described in Sec. 2.2) were used to register these
partial scans and the absolute mean error between
ground truth transformation and estimated transfor-
mation were computed as shown in Figure 8a and
Figure 8b. The quantitative representation of the re-
sults is shown in Table 1.
In Figure 8b coloured icons represent differ-
ent partial scans from various viewpoints, with the
icon size indicating absolute mean error magnitude.
Notably, registration was conducted relative to the
first scan, leading to zero error due to the applied
transformation being the identity matrix. For small
transformations (see Figure 8) both methods aligned
point clouds well, but Global ICP outperformed Pose
Graph. Numeric results are shown in Table 1. Due
to time constrains, the test was randomly performed
once, possibly explaining Pose Graph’s occasional
better accuracy. However, as we expanded the applied
transformations range from 0 to 15 (Figure 8), abso-
lute mean error for both methods increased. In our ex-
periments, Pose Graph sensitivity to parameters like
voxel size, maximum correspondence distance, and
edge pruning threshold resulted in higher error. Con-
sequently, the Global ICP registration method was
chosen.
4.2 Comparison of Different
Cloud-to-Cloud Distance Methods
Various distance metrics were assessed with respect
to point density, noise level, and hole radius, as shown
in Figure 9. The y-axis represents the deviation from
the ground truth distance, while the x-axis illustrates
different levels of point density, noise, and hole ra-
dius. To ensure unbiased results, each plot has been
obtained by computing an average value, calculated
from 100 executions. The implementation of the dis-
tance measurements was based on a Python wrapper
for CloudCompare called CloudComPy (Girardeau-
Montaut, 2016).
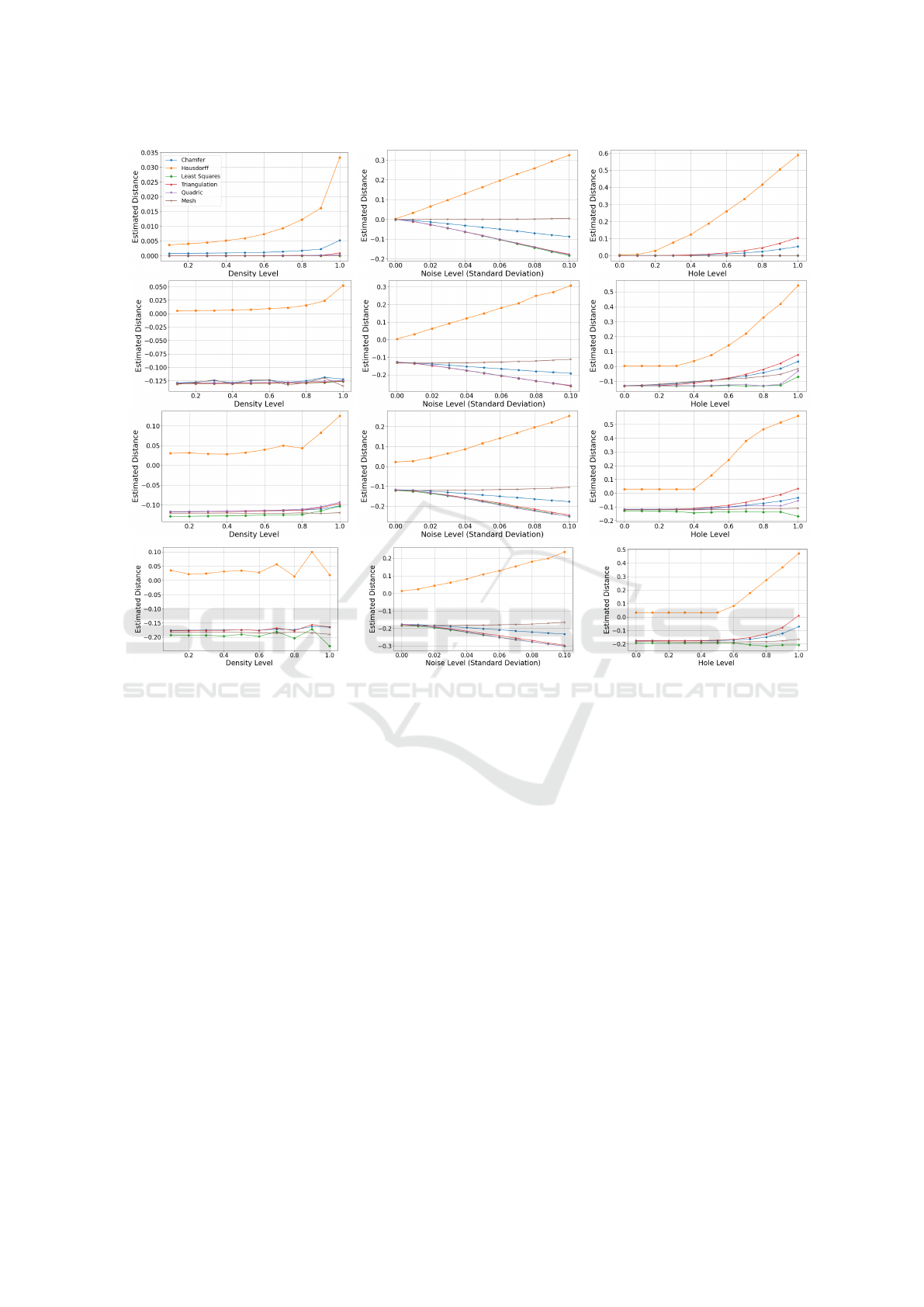
Upon reviewing the results following insights
emerge:
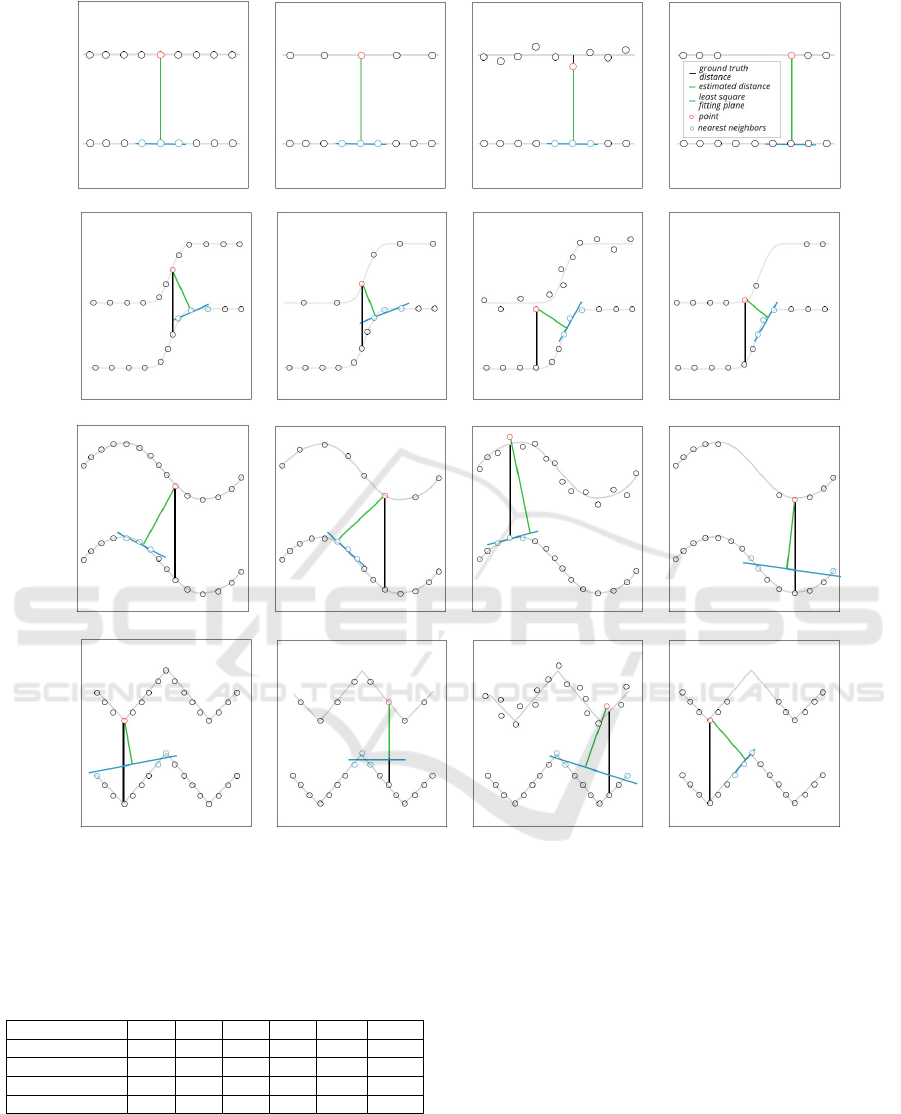
• The shapes of objects play a crucial role in in-
fluencing the outcomes for different point cloud
distance metrics. This stems from the fact that
the methods rely on nearest neighbour searches,
where complex shapes can lead to incorrect
matches. For example, in Figure 10 we can ob-
serve that depending on the shape of a surface,
the Least squares method struggles to find the cor-
rect distance between planes. In the case of a
slope, points on the inclined part of the shape’s
surface are incorrectly associated with the clos-
est points on the reference surface, resulting in
distance measures that are underestimated. More-
over, for the triangular wave, the closest points to
the tip of the triangle are distributed on both sides
of the wave, leading to a inadequate fitting line
and inaccurate distance estimations.
• The Hausdorff Distance, calculated by determin-
ing the maximum distance between any pair of
nearest neighbours, provides the best results for
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
66
PlaneSlope
Sine wave
Triangular Wave
Density Noise Hole
Figure 9: Evaluation of the distance metrics on a plane, slope, sine wave, and triangular wave shape. Each result is an average
after 100 executions. The distance is given with respect to the ground truth distance (a perfect result would have an estimated
distance of 0.0), with increasing levels of density, noise, and size of the hole in the point clouds.
all shapes when the point cloud is free of per-
turbations. Its sensitivity becomes noticeable as
the levels of noise, density variations, and size
of the hole increase, diverging considerably from
other distance metrics. The introduction of pertur-
bations increases the maximum distance between
pairs of nearest neighbours, leading to poor esti-
mation of the distance between point cloud and
the ground truth. This behaviour was later con-
firmed when testing with real life objects (see Ta-
ble 3).
• The Chamfer Distance demonstrates comparable
accuracy to point-to-plane distance metrics, ex-
cept in the context of varying levels of noise. Un-
like other methods, the Chamfer Distance is less
affected by noise. This can be explained by the
fact that the Chamfer Distance is based on averag-
ing, which acts as a mitigating factor against the
impact of noise.
• It was found that the changing point cloud den-
sity and hole size (see Figure 7) does not signif-
icantly affect the distance estimation. However,
when increasing the hole radius for slope, sine
wave, and triangular wave shapes, the distance es-
timation is getting closer to the correct value. This
can be explained by the fact that with a decreasing
influence of the surface complexity, more points
in the middle of the mesh are being removed. On
the other hand, increasing the radius of the hole
for the plane shape decreases the estimated dis-
tance accuracy, because individual points are far-
ther away from each other.
• The Cloud-to-mesh Distance measurement pro-
vided the best results when the noise, hole, and
density levels are high (see Table 2). We be-
lieve that small error changes with respect to the
added noise result from the uniform distribution
of the applied noise. When computing the dis-
tance, the averaging step neutralizes the effect of
Evaluation of 3D Point Cloud Distances: A Comparative Study in Multi-Point Cloud Fusion Environments
67
PlaneSlope
Sinewave
Triangular Wave
Original Density Noise Hole
Figure 10: Illustration of the Least squares distance metric for the synthetically generated shapes (plane, slope, sine wave,
triangular wave). Our different varitions/conditions (point cloud density, noise, hole) have been applied as shown in the figure.
The corresponding rendered shapes are shown in Figure 4.
Table 2: Evaluation of distance metrics on synthetic data
with average levels of noise (0.07), hole (0.5) and point den-
sity (0.4).
D
CD
D
H
D
LS
D
Q
D
T RI
D
C2M
Plane 0.40 0.21 0.11 0.12 0.10 0.01
Slope 0.25 0.27 0.19 0.18 0.16 0.09
Sine wave 0.22 0.20 0.19 0.18 0.17 0.12
Triangular wave 0.12 0.11 0.22 0.22 0.21 0.18
the noise. Furthermore, point-to-point and point-
to-plane distance methods depend on a nearest
neighbor search, which yields a significant sen-
sitivity to noise.
4.3 Comparison with Ground Truth
Model
After applying the registration step to the partial
scans, a merged point cloud was created (see Fig-
ure 1). To correctly analyze the results, compar-
ing it to a ground truth model is essential. For the
Cloud-to-cloud Distance the reference model (e.g.,
CAD model) was sampled to a point cloud. For the
Cloud-to-mesh Distance, the ground truth mesh of
the reference model was used directly to compute the
distance. The results were visualized using Cloud-
Compare v.2.13.alpha software (Girardeau-Montaut,
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
68

Merged point cloud. Cloud-to-cloud method. Cloud-to-mesh method.
C2C distance
Count
C2M signed distance
Count
Figure 11: Illustration of the distribution of distances using two different distance metrics. On the left, the merged point
cloud is shown after silhouette masking on partial scans and performing Global ICP registration. On this merged point cloud
we visualize the distribution of distances compared to the ground truth point cloud using the Least squares Cloud-to-cloud
Distance (centre) and Cloud-to-mesh Distance (right). The histograms of distances obtained by the Least square Cloud-to-
cloud or C2C Distance and the Cloud-to-mesh or C2M signed Distance are shown at the bottom center and right, respectively.
2016).
Comparison with Point Cloud. As detailed in
Sec. 2.3, various methods for computing Cloud-to-
cloud Distance exist. However, some of the distance
metrics cannot be used in our case. For instance, the
Earth Mover’s Distance requires both the reference
and compared point cloud to have the same number
of points, which is not possible in our experiments.
Additionally, Chamfer and Hausdorff Distances pro-
vide only one value as a distance metric, while for in-
dustrially relevant scenarios, it would be beneficial to
retrieve the distribution of distances across the entire
point cloud, in order to detect any imperfections due
to manufacturing problems for instance. However, for
evaluation purposes both methods were also included
in the Table 3. The point-to-plane methods exhibited
similar results (see Figure 9 ). However, in our real-
life testing based on lab acquisitions, the plane fitting
method demonstrated more accurate estimation of the
distance compared to the rest Cloud-to-cloud methods
(see in Table 3).
Comparison with Mesh. The merged point cloud
can be directly compared to the 3D mesh (shown in
Figure 5). The computation involves determining the
distance between individual points of the combined
point cloud and the nearest triangle of the mesh. The
Figure 12: The distance map for cube, gear, hirt and bracket
objects (from left to right). Colors represent the points’ de-
viation from ground truth, ranging from red (higher error)
to blue (lower error) with yellow and green color between.
Table 3: Evaluation of Distance metrics on different real
world data, objects shown in Figure 12.
D
CD
D
H
D
LS
D
Q
D
T RI
D
C2M
bunny 0.18 9.97 0.08 0.09 0.13 0.03
hirt 1.06 13.74 0.14 0.16 0.16 0.03
cube 1.76 48.98 0.49 0.53 0.54 0.42
gear 0.43 9.66 0.16 0.18 0.19 0.05
bracket 0.94 9.56 0.72 0.74 0.74 0.28
resulting distances have signed values based on the
orientation of the triangle normal.
To objectively test the distance metrics in real life
scenario, five objects with various complexities were
chosen (see Figure 11 and Figure 12). It was exper-
imentally observed that the Cloud-to-mesh method
provide better estimation of the distance. The abso-
lute mean value for the Cloud-to-mesh was found to
be lower across all scenarios. The distribution of the
Evaluation of 3D Point Cloud Distances: A Comparative Study in Multi-Point Cloud Fusion Environments
69

distances as histogram for Cloud-to-mesh and Least
Squares methods can be seen on Figure 11.
5 CONCLUSIONS
In this paper, we conducted a comprehensive evalu-
ation of 3D point cloud distances, focusing on their
performance in multi-point cloud fusion scenarios.
Our evaluation involved synthetic partial scans gen-
erated under various viewpoints. Misalignment errors
were synthetically introduced through random rota-
tional and translational transformations. The compar-
ison of Global ICP and Pose Graph methods showed
that while both methods show a lower accuracy as
the degree of the applied transformations increase,
Global ICP showed to perform better under small
synthetic transformation (translation, rotation) errors.
Pose Graph showed to be more sensitive to initial pa-
rameter settings such as voxel size, maximum corre-
spondence distance, and edge pruning threshold.
Our investigation into Cloud-to-cloud Distance
metrics revealed shape-dependent accuracy varia-
tions. As the complexity of the shapes increased, the
nearest neighbours search, which is the core of all
methods, led to incorrect generation of correspond-
ing points. In the case of the slope, points on the in-
clined part of the shape’s surface were mistakenly as-
sociated with the nearest points on the reference sur-
face. This led to underestimated distance measure-
ments (See Figure 10). The Hausdorff Distance ex-
hibited sensitivity to perturbations, while the Cham-
fer Distance demonstrated resilience to noise due to
its averaging mechanism. Changes in point cloud
density and hole levels had negligible effects on the
distance measurements. Notably, the Cloud-to-mesh
Distance computation consistently provided superior
results across different perturbations and shapes.
In the context of real-world industrial scanning,
our approach involved an initial alignment through
the calibration of the kinematic system used for scan-
ning, and a pre-processing step to remove sensor-
induced background noise. This was done using sil-
houette masking to reduce noise and applying the
Global ICP registration to merge the partial scans.
Cloud-to-cloud and Cloud-to-mesh Distance metrics
were introduced to evaluate the merged point cloud
obtained from five different objects. By looking at the
Table 3, it can be seen that Cloud-to-mesh Distance
provided better distance estimation compared to the
rest of the methods.
Future work will focus on refining registration
methods tailored to address the challenges of complex
industrial scanning scenarios. Furthermore, enhance-
ments to distance metrics for varying point densi-
ties, noise levels, and geometric complexities will be
pursued. Improvement suggestions include increas-
ing the number of nearest neighbours to reach an im-
proved surface approximation and adding texture pri-
ors. Real-world materials can show transparencies,
dark areas, and highly reflective regions. Addition-
ally, the use of texture priors shall be explored for in-
dustrial object evaluation and measurement that are
highly accurate.
REFERENCES
Aoki, Y., Goforth, H., Srivatsan, R. A., and Lucey, S.
(2019). Pointnetlk: Robust & efficient point cloud reg-
istration using pointnet. In CVPR, pages 7163–7172.
Besl, P. and McKay, N. D. (1992). A method for registration
of 3-d shapes. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 14(2):239–256.
Brightman, N., Fan, L., and Zhao, Y. (2023). Point cloud
registration: A mini-review of current state, challeng-
ing issues and future directions. AIMS Geosci, 9:68–
85.
Chen, L. and Xu, J.-c. (2004). Optimal delaunay triangula-
tions. Journal of Computational Mathematics, pages
299–308.
Chen, Y. and Medioni, G. (1991). Object modeling by reg-
istration of multiple range images. In Proceedings.
1991 IEEE International Conference on Robotics and
Automation, pages 2724–2729 vol.3.
Choi, S., Zhou, Q.-Y., and Koltun, V. (2015). Robust re-
construction of indoor scenes. In CVPR, pages 5556–
5565.
Cobb, W., Peindl, R., Zerey, M., Carbonell, A., and Heni-
ford, B. (2009). Mesh terminology 101. Hernia, 13:1–
6.
Fan, H., Su, H., and Guibas, L. J. (2017). A point set gen-
eration network for 3d object reconstruction from a
single image. In CVPR, pages 605–613.
Girardeau-Montaut, D. (2016). Cloudcompare. France:
EDF R&D Telecom ParisTech, 11.
Glira, P., Pfeifer, N., Briese, C., and Ressl, C. (2015).
A correspondence framework for als strip ad-
justments based on variants of the icp algorithm.
Photogrammetrie-Fernerkundung-Geoinformation,
2015(4):275–289.
Huo, L., Liu, Y., Yang, Y., Zhuang, Z., and Sun, M. (2023).
Research on product surface quality inspection tech-
nology based on 3d point cloud. Advances in Mechan-
ical Engineering, 15(3):16878132231159523.
Huttenlocher, D. P., Klanderman, G. A., and Rucklidge,
W. J. (1993). Comparing images using the hausdorff
distance. IEEE TPAMI, 15(9):850–863.
Jones, M. W. (1995). 3d distance from a point to a triangle.
Department of Computer Science, University of Wales
Swansea Technical Report CSR-5, page 5.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
70

Kim, P., Chen, J., and Cho, Y. K. (2018). Slam-driven
robotic mapping and registration of 3d point clouds.
Automation in Construction, 89:38–48.
Koopman, H. and Sportiche, D. (1982). Variables and the
bijection principle.
Lattanzi, D. and Miller, G. (2017). Review of robotic infras-
tructure inspection systems. Journal of Infrastructure
Systems, 23(3):04017004.
Lee, D. and Kweon, I. (2000). A novel stereo camera sys-
tem by a biprism. Transactions on Robotics and Au-
tomation (T-RO), 16(5):528–541.
Monji-Azad, S., Hesser, J., and L
¨
ow, N. (2023). A review of
non-rigid transformations and learning-based 3d point
cloud registration methods. ISPRS Journal of Pho-
togrammetry and Remote Sensing, 196:58–72.
Mu
˜
noz, L. R., Villanueva, M. G., and Su
´
arez, C. G. (2014).
A tutorial on the total least squares method for fitting
a straight line and a plane. Revista de Ciencia e Ingen.
del Institute of Technology, Superior de Coatzacoal-
cos, 1:167–173.
Nazareth, J. L. (2009). Conjugate gradient method. Wiley
Interdisciplinary Reviews: Computational Statistics,
1(3):348–353.
Peterson, L. E. (2009). K-nearest neighbor. Scholarpedia,
4(2):1883.
Rousseeuw, P. J. (1987). Silhouettes: a graphical aid to
the interpretation and validation of cluster analysis.
Journal of computational and applied mathematics,
20:53–65.
Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants
of the icp algorithm. In Proceedings Third Interna-
tional Conference on 3d Digital Imaging and Model-
ing, pages 145–152.
Sarode, V., Li, X., Goforth, H., Aoki, Y., Srivatsan,
R. A., Lucey, S., and Choset, H. (2019). Pcr-
net: Point cloud registration network using pointnet.
arXiv:1908.07906.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. (2006). A comparison and evaluation
of multi-view stereo reconstruction algorithms. In
CVPR, volume 1, pages 519–528. IEEE.
Staderini, V., Gl
¨
uck, T., Schneider, P., Mecca, R., and Kugi,
A. (2023). Surface sampling for optimal viewpoint
generation. In ICPRS, pages 1–7. IEEE.
Su, S., Wang, C., Chen, K., Zhang, J., and Yang, H. (2021).
Mpcr-net: Multiple partial point clouds registration
network using a global template. Applied Sciences,
11(22).
Sun, W., Wang, J., Yang, Y., Jin, F., and Sun, F. (2023).
Accurate deformation analysis based on point posi-
tion uncertainty estimation and adaptive projection
point cloud comparison. Geocarto International, page
2175916.
Thorstensen, J., Thielemann, J. T., Risholm, P., Gjessing,
J., Dahl-Hansen, R., and Tschudi, J. (2021). High-
quality dense 3d point clouds with active stereo and a
miniaturizable interferometric pattern projector. Op-
tics Express, 29(25):41081–41097.
Wandinger, U. (2005). Introduction to lidar. In Lidar:
range-resolved optical remote sensing of the atmo-
sphere, pages 1–18. Springer.
Wang, H., Liu, Y., Dong, Z., Guo, Y., Liu, Y.-S., Wang, W.,
and Yang, B. (2023). Robust multiview point cloud
registration with reliable pose graph initialization and
history reweighting. In CVPR.
Wu, T., Pan, L., Zhang, J., Wang, T., Liu, Z., and Lin,
D. (2021). Density-aware chamfer distance as a
comprehensive metric for point cloud completion.
arXiv:2111.12702.
Yang, J., Li, H., Campbell, D., and Jia, Y. (2015). Go-
icp: A globally optimal solution to 3d icp point-set
registration. IEEE TPAMI, 38(11):2241–2254.
Yuan, W., Khot, T., Held, D., Mertz, C., and Hebert, M.
(2018). Pcn: Point completion network. In Interna-
tional conference on 3d vision (3DV), pages 728–737.
IEEE.
Zhang, Z., Dai, Y., and Sun, J. (2020). Deep learning based
point cloud registration: an overview. Virtual Real-
ity & Intelligent Hardware, 2(3):222–246. 3d Visual
Processing and Reconstruction Special Issue.
Evaluation of 3D Point Cloud Distances: A Comparative Study in Multi-Point Cloud Fusion Environments
71
