
Transformer-Based Video Saliency Prediction with High Temporal
Dimension Decoding
Morteza Moradi, Simone Palazzo and Concetto Spampinato
PeRCeiVe Lab, University of Catania, Italy
Keywords:
Video Saliency Prediction, Gaze Prediction, Visual Attention, Spatio-Temporal Transformer.
Abstract:
In recent years, finding an effective and efficient strategy for exploiting spatial and temporal information has
been a hot research topic in video saliency prediction (VSP). With the emergence of spatio-temporal trans-
formers, the weakness of the prior strategies, e.g., 3D convolutional networks and LSTM-based networks, for
capturing long-range dependencies has been effectively compensated. While VSP has drawn benefits from
spatio-temporal transformers, finding the most effective way for aggregating temporal features is still chal-
lenging. To address this concern, we propose a transformer-based video saliency prediction approach with
high temporal dimension decoding network (THTD-Net). This strategy accounts for the lack of complex hier-
archical interactions between features that are extracted from the transformer-based spatio-temporal encoder:
in particular, it does not require multiple decoders and aims at gradually reducing temporal features’ dimen-
sions in the decoder. This decoder-based architecture yields comparable performance to multi-branch and
over-complicated models on common benchmarks such as DHF1K, UCF-sports and Hollywood-2.
1 INTRODUCTION
Saliency prediction aims to model the behavior of
the human visual system to predict fixation points
when freely observing a visual scene. Recently,
saliency prediction has gained great importance in
different computer vision tasks, including medical
analysis (Arun et al., 2021), gaze estimation (Abawi
et al., 2021), video compression (Lyudvichenko et al.,
2017), object segmentation (Chen et al., 2020), to
name a few. When it comes to video saliency predic-
tion (VSP) (Wang et al., 2019) the problem becomes
more challenging because not only should spatial fea-
tures be taken into account, but also long-range tem-
poral dependencies among frames. In this regard, dif-
ferent approaches for capturing spatio-temporal fea-
tures in VSP have been introduced. One of the
most common strategies in this domain is to capture
spatial and temporal features in two separate paral-
lel branches and integrating these features to form
the spatio-temporal features for facilitating the video
saliency prediction process (Zhang et al., 2020). An-
other technique for extracting and exploiting spatio-
temporal information involves LSTM networks (Fang
et al., 2020), and temporal information is extracted
based on processing a sequence of spatial features,
without synchronizing temporal and spatial features.
To address the weakness of LSTM-based mod-
els, 3D convolution-based VSP models (Bellitto et al.,
2021) improved the performance of the video saliency
prediction models to a great extent by aggregating
the spatial and temporal features at the same time us-
ing 3D convolutional layers. On the other hand, for
capturing long-range temporal dependencies among
consecutive frames, 3D convolutional networks fall
short since they extract spatio-temporal information
within a fixed space-time local window. To alleviate
the aforementioned problem, the emergence of spatio-
temporal vision transformers (Li et al., 2023) has
revolutionized video understanding research. Since
transformers process patches at a global level, they are
capable of capturing and comparing features among
spatial and temporal dimensions at long distances, in
contrast to 3D convolution-based networks, which in-
stead rely on aggregation and downsampling.
However, it is of high importance to select an ef-
fective strategy for employing and reducing the tem-
poral dimension of the features that are provided by
the encoder to the decoding stage. For instance,
in Zhou et al. (2023), a computationally expensive
VSP model is introduced in which the temporal di-
mension of the spatio-temporal features that are pro-
vided by the encoder is reduced and then these tem-
porally downsampled features feed the decoder. Such
616
Moradi, M., Palazzo, S. and Spampinato, C.
Transformer-Based Video Saliency Prediction with High Temporal Dimension Decoding.
DOI: 10.5220/0012422800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
616-623
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

an approach can deprive the network’s decoder of
long-range dependencies that are extracted in the
transformer-based encoder’s multi-level features. A
pure-transformer based architecture is proposed in
Ma et al. (2022). This network employs attention
mechanism in order to extract spatio-temporal depen-
dencies between the input past frames and the target
future frame. Plus, a cross-attention guidance block
(CAGB) is designed and employed in the decoder that
aims to aggregate the extracted multi-level represen-
tations from the encoder.
In light of the aforementioned observation, a
transformer-based video saliency prediction model
(THTD-Net) is presented in this paper. The under-
lying idea for this model is to introduce a lighter ar-
chitecture that takes benefit of the whole temporal
information in the decoding stage. In other words,
the temporal dimensions of features provided by the
transformer-based encoder is not reduced before be-
ing fed to decoder. We found that this expedient
compensates the need for attention module in the de-
coding stage or multiple decoding branches, yield-
ing a model with fewer parameters compared to Zhou
et al. (2023) (the current best-performing model on
the DHF1K benchmark) while yielding performance
that are on par or better than the state of the art.
Ablation studies reveal that, in order to effectively
decode spatio-temporal features with high temporal
dimension, it is important to employ a comparably
longer decoder in terms of the number of the layers,
as well as to avoid reducing the features’ temporal
resolution too quickly in the decoding stage. Hence,
we downsample the temporal dimension of the spatio-
temporal features only in some of the convolutional
layers in the decoder, often leaving that dimension
unchanged in consecutive layers. Nonetheless, at the
same time, excessively increasing the number of de-
coding layers does not improve the performance, but
increases the number of the model parameters and
may lead to overfitting.
2 RELATED WORK
The main challenge of VSP is considering both spa-
tial and temporal information for predicting the fo-
cus of visual attention. In this regard, besides extract-
ing spatial features on regions of interest in a specific
frame, the relationship between consecutive frames
to track changes in objects’ locations, their shapes
and relation with the surrounding context should be
taken into account. A wide variety of methods have
been proposed to capture and integrate such spatio-
temporal features, aiming at improving the prediction
accuracy while preserving computational and mem-
ory efficiency. UNISAL (Droste et al., 2020), in the
form of an encoder-RNN-decoder architecture- pre-
dicts visual saliency both for videos and images in an
integrated framework. In this work, the diverse do-
main shifts between video datasets and between video
and image data has been addressed by specific do-
main adaptation techniques. Also, to extract temporal
features both for video data and even static images,
a Bypass-RNN module is introduced and its decod-
ing stage is followed by a domain-adaptive smooth-
ing component. Another work dealing with domain
adaptation is HD2S (Bellitto et al., 2021): instead of
directly generating a saliency map, multiple interme-
diate maps based on features obtained in different ab-
straction levels are produced and integrated to yield
the final output. To make the model generalizable and
dataset-agnostic, multi-scale domain adaption is ac-
companied with gradient reversal layers.
A recent trend in the VSP area is designing mul-
timodal models leveraging audio data to improve
the accuracy of the prediction. TSFP-Net (Chang
and Zhu, 2021) is a 3D fully-convolutional encoder-
decoder model with one visual and one audio branch.
The encoder part uses S3D (Xie et al., 2018) as
the backbone for spatio-temporal features extraction,
while hierarchical decoding takes into account the in-
fluence of those features in various scales and at dif-
ferent levels. Another multimodal encoder-decoder
architecture is AViNet (Jain et al., 2021), that inte-
grates visual features from ViNet (which uses S3D to
encode spatio-temporal features) and audio features
from SoundNet (Aytar et al., 2016).
In the last few years, several VSP methods lever-
aging attention mechanisms have been proposed be-
cause of their property of identifying the most impor-
tant and relevant information (e.g., objects), within a
frame, rather than less important features (e.g., back-
ground). The SalSAC (Wu et al., 2020) architecture is
designed in the form of a CNN-LSTM-Attention net-
work. The encoder aims to extract spatial information
from frames. Between the encoder and decoder parts,
a shuffled attention module is employed and relations
between features obtained from neighboring frames
are calculated through a correlation calculation layer.
Then, the temporal information is captured by using
correlation-based ConvLSTM modules.
STSANet (Wang et al., 2021) aims to remedy
the weakness of 3D convolutional-based networks in
capturing long-range temporal relations among video
frames by embedding spatio-temporal self-attention
modules into 3D convolutional network with the aim
of managing temporal dependencies. The spatio-
temporal features that are obtained from different
Transformer-Based Video Saliency Prediction with High Temporal Dimension Decoding
617

levels of the network are transferred to the atten-
tion multi-scale fusion module while semantic rela-
tionships among features are considered. MSFF-Net
(Zhang et al., 2023) introduces two new modules to
common architectures. Firstly, the features extracted
through S3D-based encoder are sent to two frame-
wise attention modules for learning temporal infor-
mation. Then, the BiTSFP module is introduced, in-
cluding two attention-based fusion pipelines, for bi-
directional fusion that aims to add the flow of shallow
location information on the basis of the previous flow
of deep semantic information. One of them works on
spatial features and is used to integrate neighbor in-
formation; the other incorporates channel weights of
features for more efficient integration.
Following the undeniable advantages of vision
transformers (Dosovitskiy et al., 2021) in captur-
ing spatio-temporal relationships, several VSP works
have been integrating them for saliency prediction
such as TMFI-Net (Zhou et al., 2023). TMFI-Net em-
ploys Video Swin Transformer (Liu et al., 2022) as the
backbone that provides multi-level spatio-temporal
features with rich contextual cues. Each decoder
branch uses a multi-dimensional attention module to
decode weighted features. Finally, the intermediate
saliency maps of decoder branchs are combined and
the final saliency map is constructed by applying a
3D convolutional layer. Another work (Xiong et al.,
2023) tackles video saliency prediction and detection
using transformer in a unified framework. Transform-
ers have also been applied to video saliency forecast-
ing, i.e., the prediction of attention regions in consec-
utive future frames (Ma et al., 2022).
Taking into account the important role of temporal
information in the decoding stage, we design a model
that decodes spatio-temporal features, as provided by
a transformer-based encoder, with maximum tempo-
ral dimension, while simplifying the overall model
complexity. For instance, TMFI-Net employs four at-
tention modules in each of multiple decoder branches,
increasing the number of model parameters and in-
troducing a strong temporal aggregation due to fea-
ture downsampling. Our model, instead, is designed
as a single-decoder architecture, with more but sim-
pler decoder layers, keeping the number of parame-
ters lower than TMFI-Net.
3 METHOD
3.1 Model Architecture
In this section the architectural design of the proposed
model is explained. Since capturing temporal depen-
dencies is critical for video saliency prediction, and
also considering the capabilities of spatio-temporal
transformers for this task, THTD-Net employs the
small version of Video Swin Transformer Liu et al.
(2022) as the encoder. Based on the benefits of us-
ing multi-level encoder features for VSP Ma et al.
(2022); Wang et al. (2021), Video Swin Transformer
is capable to provide hierarchical multi-level features
with different levels of semantic complexity at each
stage. Video Swin Transformer is composed of four
stages, each followed by a patch merging layer that
downsamples the spatial resolution by a factor of 2,
while concatenating and re-projecting features from
groups of 2× 2 spatially neighboring patches. The en-
coder network receives a video clip represented as a
T × H × W × 3 tensor, where T is the number of con-
secutive frames, H and W are the height and width
of each frame, respectively, and 3 is the number of
color channels. Each 3D patch of size 2 × 4 × 4 × 3
is considered as a token: the input clip is thus firstly
partitioned to non-overlapping 3D patches, yielding a
set of
T
2
×
H
4
×
W
4
tokens, each being a 96-dimensional
feature. Then, a linear embedding layer projects the
features of each token to dimensionality C. The di-
mensions of the hierarchical multi-level embeddings
for each stage of the encoder can be calculated as:
F
i
∈ R
(2
i−1
×C)×
T
2
×
H
2
i+1
×
W
2
i+1
(1)
where i is the stage index, and C = 96 is the original
token dimension.
Since one of the main motivations of this work
is to uncover the effectiveness of using features with
high temporal dimensions for VSP, in the THTD-Net
architecture the temporal dimension of the multi-level
features that are provided by the encoding stages re-
mains unaltered before feeding the decoder, in order
to provide temporally-rich information for the decod-
ing stage.
Since the outputs of each stage have different fea-
ture dimensions (spatial resolution goes from
H
4
×
W
4
to
H
32
×
W
32
, while the number of channels goes from
C to 8C, scaling by powers of 2; the temporal dimen-
sion is unchanged and equal to
T
2
), 3D convolutional
layers are employed after each encoder’s stage, to en-
able feature fusion for further decoding. In detail, a
3D convolutional layer with a 1 × 1 × 1 kernel size
is applied at each stage, providing a uniform number
of feature maps of 2C as output; also, an upsampling
layer is used at the second, third and fourth stages to
bring the spatial resolution to
H
4
×
W
4
, that is the same
as the first stage. Afterward, the spatio-temporal fea-
tures from different stages are fused through element-
wise summation.
Another goal of the proposed approach is to ex-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
618
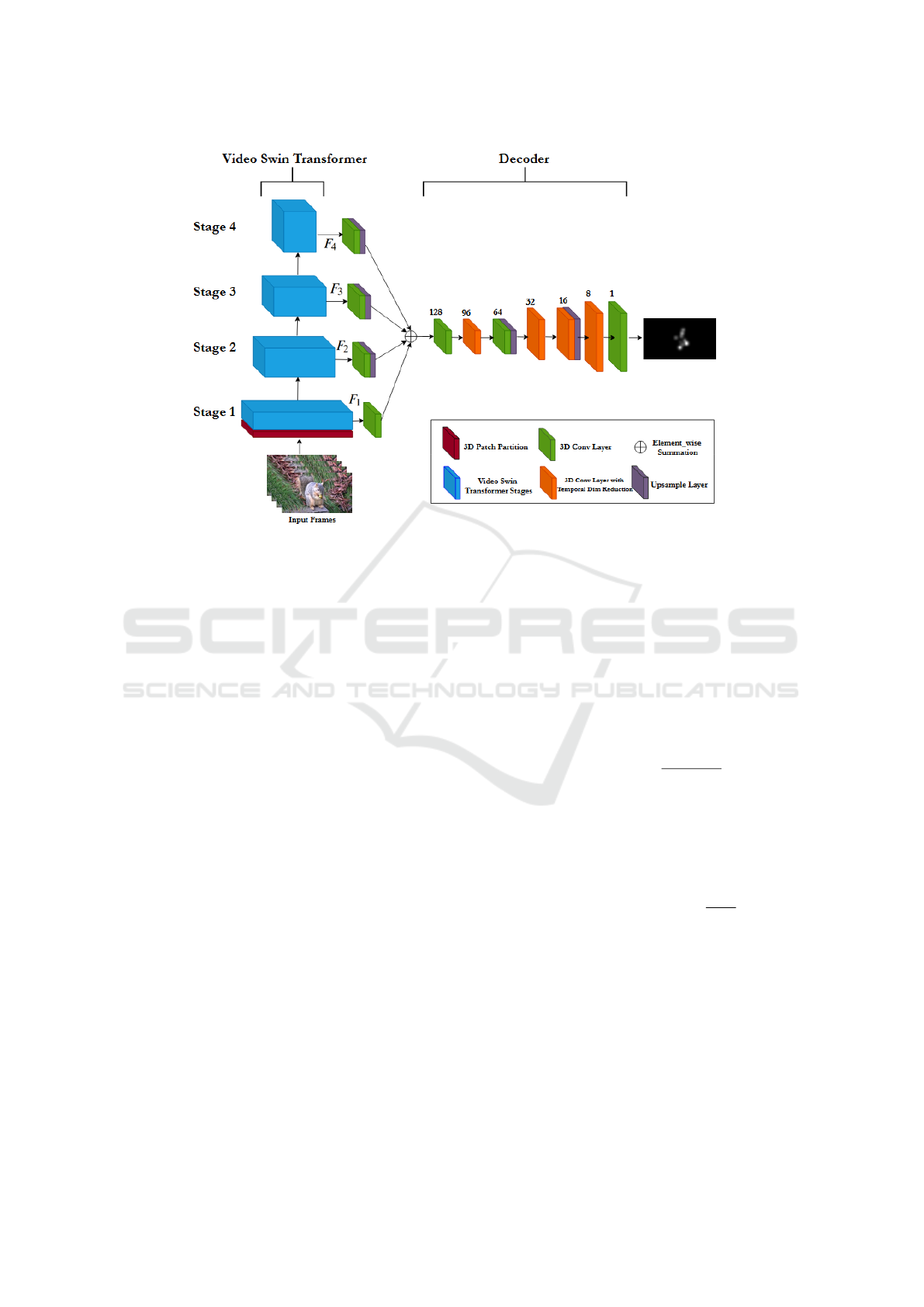
Figure 1: Overview of the proposed video saliency prediction model. The output channel dimensions of the decoder layers
are reported in the figure.
plore the effectiveness of gradually reducing the tem-
poral dimension of the features in the decoding stage
and also employing more layers in the decoder com-
paring with Zhou et al. (2023), in order to let the
model decode spatio-temporal features more effec-
tively. This strategy provides the opportunity of re-
ducing the temporal resolution more gradually, avoid-
ing the abrupt loss of information and providing rich
information in each decoding stage.
The decoder thus consists of a sequence of 3D
convolutional layers: kernel size for these layers is
either 2 × 3 × 3 (for layers that reduce the temporal
dimension; in this case, a stride of 2 × 1 × 1 is ap-
plied) or 1 × 3 × 3 (for layers that do not reduce the
temporal dimension). A visualization of the model ar-
chitecture is reported in Figure 1. Spatial upsampling
is performed by doubling height and width of the fea-
ture maps, and the number of channels is gradually
reduced from 192 to 1. We utilize a ReLU activation
after each 3D convolutional layer in the decoder, ex-
cept for the last layer, for which a sigmoid activation
is employed.
3.2 Training Objective
The model receives a video clip with T consecutive
frames with the goal of predicting the saliency map on
the last frame of the clip. Therefore, the training pro-
cedure is supervised by the last frame’s ground truth
of the input clip. We followed the strategy introduced
in Zhou et al. (2023) for defining the loss function as
follows:
L (S, G) = L
CC
(S, G) + L
KL
(S, G) (2)
where S is the predicted saliency map and G is the
ground truth. L
CC
and L
KL
are Linear Correlation Co-
efficient loss and Kullback-Leibler Divergence loss,
respectively. L
CC
calculates the linear relationships
between two random variables as follows:
L
CC
(S, G) = −
cov(S, G)
ρ(S)ρ(G)
(3)
where ρ(·) is the standard deviation operator and
cov(S, G) is the covariance of S and G.
L
KL
loss aims to measure the distance between
two probability distributions and can be calculated as
follows:
L
KL
(S, G) =
∑
x
G(x)log
G(x)
S(x)
(4)
where x represents the coordinate indices.
4 EXPERIMENTS
4.1 Datasets
In order to evaluate the performance of the THTD-
Net, we conduct extensive experiments on the fol-
lowing commonly used datasets: DHF1K Wang
Transformer-Based Video Saliency Prediction with High Temporal Dimension Decoding
619

et al. (2019), Hollywood-2 Mathe and Sminchisescu
(2014), and UCF-Sports Mathe and Sminchisescu
(2014).
DHF1K. This diverse dataset consists of 1,000
videos, annotated by 17 observers while watching
videos freely. This dataset allocates 600, 100 and 300
videos as the train set, validation set and test set, re-
spectively. Since the ground truth for the test set is
not published publicly, our model’s performance on
the test set of this dataset has been evaluated by the
DHF1K benchmark team.
Hollywood-2. This large dataset is composed of
1,707 videos extracted from 69 Hollywood movies
with 12 action categories. Contrary to the strategy
that used by DHF1K for annotation, Hollywood-2
employed a task-driven viewing approach. The anno-
tations are collected from context recognition (4 ob-
servers), free viewing (3 observers) and action recog-
nition (12 observers). We select 823 videos from the
train set for training and 884 videos from the test
set for testing purpose, removing videos that do not
contain enough number of frames for feeding our en-
coder.
UCF Sports. It contains 150 videos from the UCF
sports action dataset, which includes 9 sports classes.
Its method of annotation collection is the same as the
Hollywood-2, and it also focuses on task-driven view-
ing. We adopt the same split as Wang et al. (2021)
with 103 videos for training and 47 videos for testing.
4.2 Experimental Setup
Our encoder is initialized with the pretrained weights
of the small version of Video Swin Transformer net-
work, namely Video Swin-S, on the Kinetics-400
Kay et al. (2017) dataset. Moreover, the encoder’s pa-
rameters are updated during our training procedure.
We employ the Adam Kingma and Ba (2014) opti-
mizer for training and the initial learning rate and
batch size are set to 10
−5
and 1, respectively. The
spatial resolution of the input video frames is set to
224 × 384 and at each iteration, the network receives
a video clip with T = 32 consecutive frames.
For the train and test procedures, inspired by Zhou
et al. (2023), we train our network on the training set
of the DHF1K dataset and we adopt early stopping on
the validation set of DHF1K. Then, we fine-tuned our
pretrained model on the preselected videos from train
set of Hollywood-2 and UCF Sports, separately. For
inference, the saliency maps for all the video frames
are produced based on a sliding window strategy Min
and Corso (2019). In order to generate the saliency
map for the initial frames of the clip, the original clip
is reversed, so that enough previous temporal context
is available.
For evaluating the performance of our model, we
employ two types of distribution-based and location-
based metrics (Bylinskii et al., 2018). From the for-
mer type, we use Similarity Metric (SIM) and Linear
Correlation Coefficient (CC) metrics and for the later
type we exploit AUC-Judd (AUC-J), Shuffled AUC
(S-AUC) and Normalized Scanpath Saliency (NSS)
metrics.
4.3 Result Analysis
We compare the quantitative performance of THTD-
Net with top 11 state-of-the-art VSP models that
achieved high scores on the DHF1K benchmark
1
, in-
cluding SalEMA Linardos et al. (2019), STRA-Net
Lai et al. (2019), TASED-NetMin and Corso (2019),
SalSAC Wu et al. (2020), UNISAL Droste et al.
(2020), ViNet Jain et al. (2021), HD2S Bellitto et al.
(2021), VSFT Ma et al. (2022), TSFP-Net Chang and
Zhu (2021), STSANet Wang et al. (2021), TMFI-Net
Zhou et al. (2023). All methods are evaluated on
DHF1K, UCF Sports and Hollywood-2. The quan-
titative results are reported in Table 1.
Based on the results shown in the Table 1, on
DHF1K dataset, THTD-Net achieves performance
that is substantially on par with TMFI-Net and signif-
icantly superior to other state-of-the-art methods on
metrics such as CC and NSS. On the Hollywood-2
and UCF Sports datasets, our model achieves sim-
ilar results to the best methods of the state of the
art, although it does not particularly stand out in
the metrics. It should be noted, however, that both
Hollywood-2 and UCF Sports address more specific
and narrow domains that DHF1K and thus repre-
sent an easier task, as also shown by the average
higher scores obtained by state-of-the-art methods on
all metrics, leading to a flattening of model perfor-
mance over the various metrics. A qualitative com-
parison of predicted saliency maps on DHF1K sam-
ples is illustrated in Fig. 2, showing how THTD-Net
provides consistent and on-target saliency estimation,
in spite of lacking complex attention mechanisms and
not employing a multi-branch decoding strategy. This
demonstrates the validity of the intuition that more ef-
fective temporal modeling is a key factor for achiev-
ing good performance in video saliency prediction.
An analysis of model complexity, in terms of
number of parameters, is presented in Table 2. It is
interesting to note that our model includes parame-
ters compared to the best two models of the DHF1K
benchmark, namely, Zhou et al. (2023) and Wang
et al. (2021), while providing better performance than
1
https://mmcheng.net/videosal
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
620
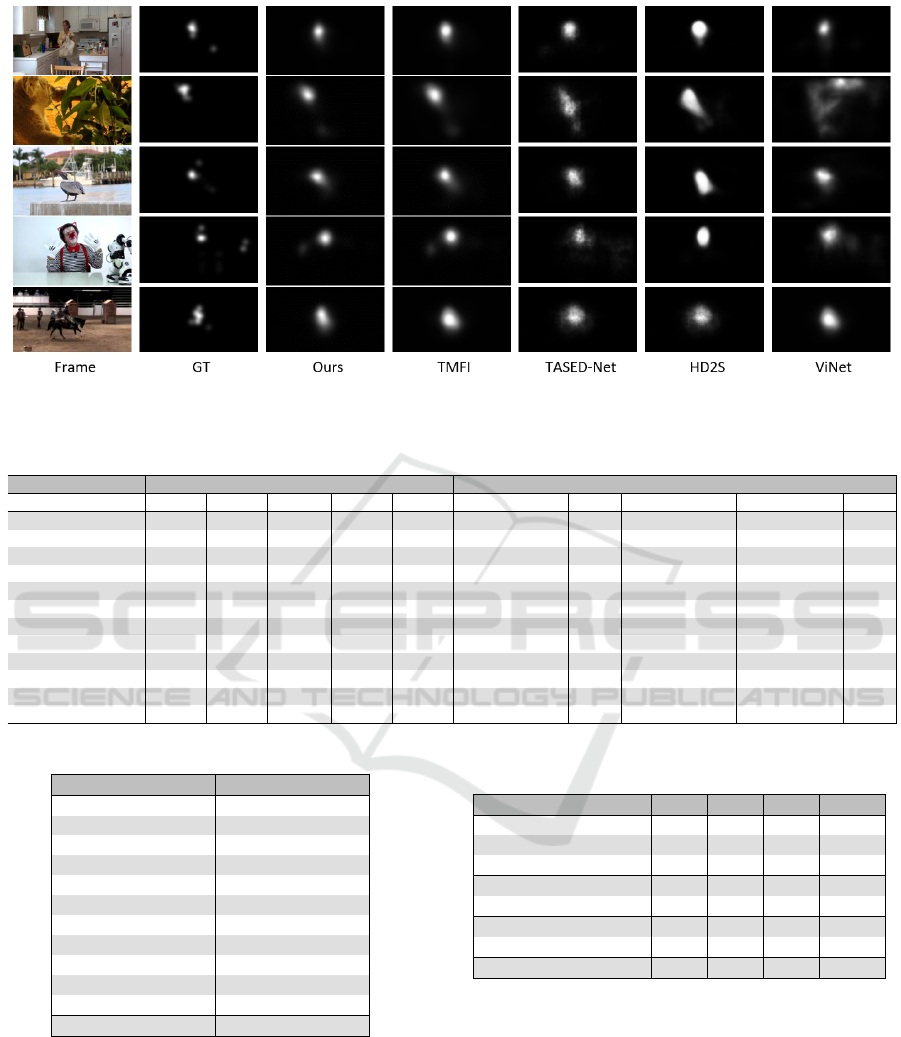
Figure 2: Qualitative comparison of the performance of different video saliency prediction models.
Table 1: Quantitative comparison of different models on DHF1K, Hollywood-2, and UCF Sports datasets. The top score in
each metric is emboldened.
Models DHF1K Hollywood-2 UCF Sports
AUC-J SIM S-AUC CC NSS AUC-J SIM CC NSS AUC-J SIM CC NSS
SalEMA 0.890 0.466 0.667 0.449 2.574 0.919 0.487 0.613 3.186 0.906 0.431 0.544 2.638
STRA-Net 0.895 0.355 0.663 0.458 2.558 0.923 0.536 0.662 3.478 0.910 0.479 0.593 3.018
TASED-Net 0.895 0.361 0.712 0.470 2.667 0.918 0.507 0.646 3.302 0.899 0.469 0.582 2.920
SalSAC 0.896 0.357 0.697 0.479 2.673 0.931 0.529 0.670 3.356 0.926 0.534 0.671 3.523
UNISAL 0.901 0.390 0.691 0.490 2.776 0.934 0.542 0.673 3.901 0.918 0.523 0.644 3.381
ViNet 0.908 0.381 0.729 0.511 2.872 0.930 0.550 0.693 3.73 0.924 0.522 0.673 3.62
HD2S 0.908 0.406 0.700 0.503 2.812 0.936 0.551 0.670 3.352 0.904 0.507 0.604 3.114
VSFT 0.9109 0.4109 0.7200 0.5185 2.9773 0.936 0.577 0.703 3.916 - - - -
TSFP-Net 0.9116 0.3921 0.7230 0.5168 2.9665 0.936 0.571 0.711 3.910 0.923 0.561 0.685 3.698
STSANet 0.9125 0.3829 0.7227 0.5288 3.0103 0.938 0.579 0.721 3.927 0.936 0.560 0.705 3.908
TMFI-Net 0.9153 0.4068 0.7306 0.5461 3.1463 0.940 0.607 0.739 4.095 0.936 0.565 0.707 3.863
THTD-Net (Ours) 0.9152 0.4062 0.7296 0.5479 3.1385 0.939 0.585 0.726 3.965 0.933 0.565 0.711 3.840
Table 2: Quantitative comparison of the model size (MB).
Model Model Size (MB)
SalEMA 364
STRA-Net 641
TASED-Net 82
SalSAC 93.5
UNISAL 15.5
ViNet 124
HD2S 116
VSFT 71.4
TSPF-Net 58.4
STSANet 643
TMFI-Net 234
THTD-Net (Ours) 220
the latter and comparable results to the former. Again,
this observation emphasizes the effectiveness of the
proposed strategy for decoding the spatio-temporal
features with high temporal dimensionality, which
compensates the requirement on complex feature in-
teractions.
Table 3: Quantitative comparison of various strategies for
decoding temporal features in the decoding stage.
Model CC NSS SIM AUC-J
Decoder: 4 layers 0.551 3.168 0.419 0.923
Decoder: 3 layers 0.551 3.124 0.410 0.922
Decoder: 2 layers 0.549 3.169 0.421 0.922
Decoder: double layers 0.553 3.169 0.414 0.923
Decoder: triple layers 0.552 3.170 0.418 0.923
Decoder: MobileNet 0.545 3.119 0.416 0.921
Decoder: half temporal res. 0.410 2.212 0.299 0.887
THTD-Net (Ours) 0.553 3.188 0.425 0.924
4.4 Ablation Study
In this section, with the aim of better assessing the
impact of the design choices in the proposed architec-
ture, we present various model variants and evaluate
their performance on DHF1K (using the labeled vali-
dation set as a test set), showing the results in Table 3.
In a first set of experiments, we investigate the im-
pact of the number of the decoding layers on the per-
formance of the model. To this aim, we assess how
the model performs with a significantly lower num-
Transformer-Based Video Saliency Prediction with High Temporal Dimension Decoding
621

ber of decoder layers (from 2 to 4, while proportion-
ally changing feature spatio-temporal dimensionality)
and, vice versa, with a larger number of decoding
layers (twice or three times larger than the baseline
architecture, by respectively adding two or three 3D
convolutional layer after each base layer, such that
newly-added layers do not alter the size of the fea-
ture maps). Results show that reducing the number of
decoder layers leads to a drop in performance, which
is especially noticeable in the NSS metric, while in-
creasing the number of layers does not provide any
advantage and even it also leads to slightly worse per-
formance.
We also assess the impact of the choice of simple
3D convolutions in the model’s decoder, and compare
the performance to a variant which employ resource-
efficient 3D-MobileNet blocks (Kopuklu et al., 2019)
as a decoder layer. Since each MobileNet block is
composed of a depth-wise and a point-wise 3D convo-
lutional layer, we configure the kernel size and stride
in such a way as to divide the temporal dimension by
a factor of 2 where appropriate. Although the number
of 3D convolutional layers is increased in this strat-
egy, the number of the parameters of the model is
less than THTD-Net, due to separable convolutions.
Results, however, exhibit significantly worse perfor-
mance, hinting that separating the spatial and tempo-
ral processing stages in the decoder ends up losing
important information for saliency prediction.
Finally, in order to investigate the effectiveness
of decoding features with lower temporal dimension,
we reduce the temporal dimension of the features by
a factor of 2 before feeding them to the decoder of
THTD-Net. As per our initial hypothesis, reducing
the temporal dimension critically affects the model’s
capability to effectively predict saliency maps.
5 CONCLUSION
In this paper a transformer-based video saliency pre-
diction model is introduced. The key idea of our ap-
proach is to design a model that benefits from the
whole temporal information that is provided by the
encoder in the decoding stage. This, we avoid re-
ducing the temporal dimension of the encoder’s fea-
tures when feeding them to the decoder, and also
ensure that temporal information is reduced gradu-
ally within different decoding stages. The model is
evaluated on three common benchmarks and the re-
sults demonstrate that its performance is comparable
to state-of-the-art methods, even though our model is
not equipped with attention modules or complex fea-
ture interaction mechanisms, and is more parameter-
efficient than the currently best-performing model
on the DHF1K benchmark, namely, TMFI-Net Zhou
et al. (2023). Our ablation studies confirm that, in or-
der to effectively process higher-resolution temporal
features, it is of high importance to employ compara-
bly longer decoder architectures. Nonetheless, at the
same time, increasing the number of the decoding lay-
ers not only would not improve the performance, but
also will increase the number of the model parameters
and consequently it may lead to overfitting.
ACKNOWLEDGMENTS
The work of Simone Palazzo, who has contributed to
the design of the model architecture and the evalua-
tion procedure, has been supported by MUR in the
framework of PNRR Mission 4, Component 2, In-
vestment 1.1, PRIN, under project RESILIENT, CUP
E53D23016360001.
REFERENCES
Abawi, F., Weber, T., and Wermter, S. (2021). GASP: gated
attention for saliency prediction. In Zhou, Z., editor,
Proceedings of the Thirtieth International Joint Con-
ference on Artificial Intelligence, IJCAI 2021, Virtual
Event / Montreal, Canada, 19-27 August 2021.
Arun, N., Gaw, N., Singh, P., Chang, K., Aggarwal, M.,
Chen, B., Hoebel, K., Gupta, S., Patel, J., Gidwani,
M., et al. (2021). Assessing the trustworthiness of
saliency maps for localizing abnormalities in medical
imaging. Radiology: Artificial Intelligence.
Aytar, Y., Vondrick, C., and Torralba, A. (2016). Sound-
net: Learning sound representations from unlabeled
video. In Lee, D. D., Sugiyama, M., von Luxburg,
U., Guyon, I., and Garnett, R., editors, Advances in
Neural Information Processing Systems 29: Annual
Conference on Neural Information Processing Sys-
tems 2016, December 5-10, 2016, Barcelona, Spain.
Bellitto, G., Proietto Salanitri, F., Palazzo, S., Rundo, F.,
Giordano, D., and Spampinato, C. (2021). Hierarchi-
cal domain-adapted feature learning for video saliency
prediction. International Journal of Computer Vision.
Bylinskii, Z., Judd, T., Oliva, A., Torralba, A., and Durand,
F. (2018). What do different evaluation metrics tell us
about saliency models? IEEE transactions on pattern
analysis and machine intelligence, 41(3):740–757.
Chang, Q. and Zhu, S. (2021). Temporal-spatial feature
pyramid for video saliency detection. arXiv preprint
arXiv:2105.04213.
Chen, Z., Zhou, H., Lai, J., Yang, L., and Xie, X. (2020).
Contour-aware loss: Boundary-aware learning for
salient object segmentation. IEEE Transactions on
Image Processing, 30:431–443.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
622

Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In 9th Interna-
tional Conference on Learning Representations, ICLR
2021, Virtual Event, Austria, May 3-7, 2021. OpenRe-
view.net.
Droste, R., Jiao, J., and Noble, J. A. (2020). Unified image
and video saliency modeling. In Computer Vision–
ECCV 2020: 16th European Conference, Glasgow,
UK, August 23–28, 2020, Proceedings, Part V 16,
pages 419–435. Springer.
Fang, Y., Zhang, C., Min, X., Huang, H., Yi, Y., Zhai, G.,
and Lin, C.-W. (2020). Devsnet: deep video saliency
network using short-term and long-term cues. Pattern
Recognition, 103:107294.
Jain, S., Yarlagadda, P., Jyoti, S., Karthik, S., Subramanian,
R., and Gandhi, V. (2021). Vinet: Pushing the limits of
visual modality for audio-visual saliency prediction.
In 2021 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), pages 3520–3527.
IEEE.
Kay, W., Carreira, J., Simonyan, K., Zhang, B., Hillier, C.,
Vijayanarasimhan, S., Viola, F., Green, T., Back, T.,
Natsev, P., Suleyman, M., and Zisserman, A. (2017).
The kinetics human action video dataset. CoRR,
abs/1705.06950.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kopuklu, O., Kose, N., Gunduz, A., and Rigoll, G. (2019).
Resource efficient 3d convolutional neural networks.
In Proceedings of the IEEE/CVF international con-
ference on computer vision workshops, pages 0–0.
Lai, Q., Wang, W., Sun, H., and Shen, J. (2019). Video
saliency prediction using spatiotemporal residual at-
tentive networks. IEEE Transactions on Image Pro-
cessing, 29:1113–1126.
Li, K., Wang, Y., Zhang, J., Gao, P., Song, G., Liu, Y., Li,
H., and Qiao, Y. (2023). Uniformer: Unifying convo-
lution and self-attention for visual recognition. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence.
Linardos, P., Mohedano, E., Nieto, J. J., O’Connor, N. E.,
Giro-i Nieto, X., and McGuinness, K. (2019). Simple
vs complex temporal recurrences for video saliency
prediction. arXiv preprint arXiv:1907.01869.
Liu, Z., Ning, J., Cao, Y., Wei, Y., Zhang, Z., Lin, S., and
Hu, H. (2022). Video swin transformer. In Proceed-
ings of the IEEE/CVF conference on computer vision
and pattern recognition, pages 3202–3211.
Lyudvichenko, V., Erofeev, M., Gitman, Y., and Vatolin, D.
(2017). A semiautomatic saliency model and its appli-
cation to video compression. In 2017 13th IEEE In-
ternational Conference on Intelligent Computer Com-
munication and Processing (ICCP), pages 403–410.
IEEE.
Ma, C., Sun, H., Rao, Y., Zhou, J., and Lu, J. (2022). Video
saliency forecasting transformer. IEEE Trans. Circuits
Syst. Video Technol., 32(10):6850–6862.
Mathe, S. and Sminchisescu, C. (2014). Actions in the eye:
Dynamic gaze datasets and learnt saliency models for
visual recognition. IEEE transactions on pattern anal-
ysis and machine intelligence, 37(7):1408–1424.
Min, K. and Corso, J. J. (2019). Tased-net: Temporally-
aggregating spatial encoder-decoder network for
video saliency detection. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 2394–2403.
Wang, W., Shen, J., Xie, J., Cheng, M.-M., Ling, H., and
Borji, A. (2019). Revisiting video saliency prediction
in the deep learning era. IEEE transactions on pattern
analysis and machine intelligence, 43(1):220–237.
Wang, Z., Liu, Z., Li, G., Wang, Y., Zhang, T., Xu, L., and
Wang, J. (2021). Spatio-temporal self-attention net-
work for video saliency prediction. IEEE Transac-
tions on Multimedia.
Wu, X., Wu, Z., Zhang, J., Ju, L., and Wang, S. (2020).
Salsac: A video saliency prediction model with shuf-
fled attentions and correlation-based convlstm. In The
Thirty-Fourth AAAI Conference on Artificial Intelli-
gence, AAAI 2020, The Thirty-Second Innovative Ap-
plications of Artificial Intelligence Conference, IAAI
2020, The Tenth AAAI Symposium on Educational
Advances in Artificial Intelligence, EAAI 2020, New
York, NY, USA, February 7-12, 2020, pages 12410–
12417. AAAI Press.
Xie, S., Sun, C., Huang, J., Tu, Z., and Murphy, K. (2018).
Rethinking spatiotemporal feature learning: Speed-
accuracy trade-offs in video classification. In Pro-
ceedings of the European conference on computer vi-
sion (ECCV), pages 305–321.
Xiong, J., Zhang, P., Li, C., Huang, W., Zha, Y., and You, T.
(2023). Unist: Towards unifying saliency transformer
for video saliency prediction and detection. CoRR,
abs/2309.08220.
Zhang, K., Chen, Z., and Liu, S. (2020). A spatial-temporal
recurrent neural network for video saliency prediction.
IEEE Transactions on Image Processing, 30:572–587.
Zhang, Y., Zhang, T., Wu, C., and Tao, R. (2023). Multi-
scale spatiotemporal feature fusion network for video
saliency prediction. IEEE Transactions on Multime-
dia.
Zhou, X., Wu, S., Shi, R., Zheng, B., Wang, S., Yin,
H., Zhang, J., and Yan, C. (2023). Transformer-
based multi-scale feature integration network for
video saliency prediction. IEEE Transactions on Cir-
cuits and Systems for Video Technology.
Transformer-Based Video Saliency Prediction with High Temporal Dimension Decoding
623
