
Combining Progressive Hierarchical Image Encoding and YOLO to
Detect Fish in Their Natural Habitat
Antoni Burguera
a
Departament de Matem
`
atiques i Inform
`
atica,
Universitat de les Illes Balears, Ctra. Valldemossa Km. 7.5, 07122 Palma, Illes Balears, Spain
Keywords:
Computer Vision, Progressive Image Encoding, Deep Learning, Underwater Robotics.
Abstract:
This paper explores the advantages of evaluating Progressive Image Encoding (PIE) methods in the context
of the specific task for which they will be used. By focusing on a particular task —fish detection in their nat-
ural habitat— and a specific PIE algorithm —Progressive Hierarchical Image Encoding (PHIE)—, the paper
investigates the performance of You Only Look Once (YOLO) in detecting fish in underwater images using
PHIE-encoded images. This is particularly relevant in underwater environments where image transmission
is slow. Results provide insights into the advantages and drawbacks of PHIE image encoding and decoding,
not from the perspective of general metrics such as reconstructed image quality but from the viewpoint of its
impact on a task —fish detection— that depends on the PHIE encoded and decoded images.
1 INTRODUCTION
As most existing Autonomous Underwater Vehicles
(AUVs) heavily depend on batteries, their operational
autonomy is limited. This limitation restricts the ex-
ploration of underwater regions to a certain size. To
address this issue, multi-session approaches (Latif
et al., 2013) have been proposed, where extensive
missions are divided into smaller segments, allowing
for recharging between sessions. However, this so-
lution comes with its challenges, including the need
for specific infrastructure and a significant increase
in mission completion time. Consequently, the rele-
vance of multi-robot systems (Do et al., 2020; Bonin-
Font and Burguera, 2020) in underwater environ-
ments is growing. These systems entail deploying
multiple AUVs simultaneously, with each one tasked
to explore a specific area. This approach ensures
that mission completion time is not compromised, en-
abling the coverage of large underwater areas. Given
the involvement of multiple AUVs, effective commu-
nication becomes essential in these systems.
Underwater communication faces more limita-
tions compared to its terrestrial counterpart (Jaafar
et al., 2022). The attenuation of electromagnetic
waves in water results in reduced bandwidth and lim-
ited transmission distances when using standard Ra-
a
https://orcid.org/0000-0003-2784-2307
dio Frequency (RF) systems. While acoustic systems
offer larger communication ranges, their bandwidth
typically falls below that of RF. Light-based commu-
nications boast a significantly better bandwidth than
both RF and acoustic systems. However, they often
require the transmitter to be in the line of sight of the
receiver, making them susceptible to interruptions due
to water currents, underwater fauna, or unexpected
AUV motions. Consequently, underwater communi-
cation is generally characterized by its unreliability,
slowness, or a combination of both.
While acoustic sensing remains the preferred
modality in sub-sea scenarios, the use of cameras in
underwater robotics has witnessed a significant in-
crease in recent years. Numerous studies have delved
into computer vision with an underwater focus (An-
war and Li, 2020), addressing challenges like scat-
tering and poor lighting conditions. These investiga-
tions have successfully facilitated underwater tasks,
including object detection, image segmentation (Bur-
guera et al., 2016), and Visual Simultaneous Localiza-
tion and Mapping (SLAM) (K
¨
oser and Frese, 2020) in
sub-sea environments. This growth in the use of un-
derwater cameras means that image transmission in
multi-robot systems is crucial.
When AUVs share images among themselves or
with a base station, it is important to consider the
communication challenges mentioned earlier. Trans-
mitting raw images or using standard image compres-
Burguera, A.
Combining Progressive Hierarchical Image Encoding and YOLO to Detect Fish in Their Natural Habitat.
DOI: 10.5220/0012423700003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
333-340
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
333

sion formats is susceptible to transmission errors or
interruptions in communication. In such cases, Pro-
gressive Image Encoding (PIE) approaches (Monika
et al., 2021; Rubino et al., 2017) come into play. In
essence, PIE algorithms break down the image infor-
mation into chunks, allowing for individual transmis-
sion through the communication medium. The re-
ceiver can then reconstruct the original image, pro-
gressively gaining detail with each received chunk. In
the event of communication loss, the receiver already
has the full image, albeit at a lower quality, and can
seamlessly integrate any remaining chunks once com-
munication is restored.
Well-known examples of PIE include Ordered
Dither Block Truncation Coding (ODBTC) (Guo,
2010), which spatially divides and encodes the image;
Set Partitioning in Hierarchical Trees (SPIHT) (Said
and Pearlman, 1996), which utilizes wavelet trans-
forms for hierarchical partitioning of the image; and
Depth Embedded Block Tree (DEBT) (Rubino et al.,
2017), which combines SPIHT and ODBTC concepts
to improve compression ratio and speed. Some re-
searchers are now introducing the Neural Networks
(NN) into this domain. For instance, (Feng et al.,
2019) employs NN to distinguish relevant objects in
the image from the background, encoding the identi-
fied objects with higher quality.
In the context of underwater robotics, where
specialized software and application-specific hard-
ware are frequently used, it is desirable for PIE ap-
proaches to be constructed using established algo-
rithms readily accessible through libraries compatible
with diverse hardware platforms and programming
languages. Considering this factor, along with com-
putational efficiency and the balance between quality
and size, we devised and published the Progressive
Hierarchical Image Encoding (PHIE) approach (Bur-
guera, 2023; Burguera and Bonin-Font, 2022). This
method hierarchically partitions the image in the color
space, ensuring high quality with a reduced number of
chunks and enabling lossless reconstruction when all
the chunks are received.
To assess PIE approaches, various standard met-
rics, such as the encoding and decoding times, the
evolution of the reconstruction quality with respect
the number of transmitted chunks, or the final quality
after receiving all chunks, are commonly employed.
The above mentioned examples excel in some, if not
all, of these metrics. However, it is important to note
that these metrics treat PIE as a general-purpose algo-
rithm, whereas, in reality, these algorithms typically
target specific applications. For instance, AUVs may
share image data specifically for Multi-Robot SLAM,
while others may exchange images to build a sea floor
mosaic or to classify subsea regions based on their bi-
ological or geological structures.
One of these specific tasks, which is part of the
funded projects PLOME and COOPERAMOS, in
which the author takes part, is that of object detection.
More specifically, our goal is to detect certain subsea
elements, such as fish or nephrops and their burrows,
from the images grabbed by a bottom-looking cam-
era endowed on AUVs. Different object detectors are
available in the literature, starting from the early ap-
proaches like Viola-Jones (Viola and Jones, 2001) to
more recent ones like Mask R-CNN (He et al., 2017).
However, even though these methods address speed
and accuracy, they still struggle to achieve standard
video rates, leading to the emergence of one-stage de-
tectors like You Only Look Once (YOLO) (Redmon
et al., 2016).
The YOLO series, ranging from YOLO to
YOLOv8 and including some variants, introduced en-
hancements such as anchor boxes or various train-
ing and inference strategies. Nowadays, YOLO is a
company-backed development model and offers dif-
ferent models ranging from faster and less accurate to
slower and more accurate.
While there are other one-stage approaches like
RetinaNet (Lin et al., 2020) or EfficientDet (Tan et al.,
2020) with unique features, YOLO has become the
de facto standard. The study focuses on YOLO to
perform object detection and, more specifically, on
YOLOv5 (Ultralytics, ) due to its widespread adop-
tion.
In all these specialized scenarios, including but
not limited to visual object detection, the conventional
metrics evaluating PIE may not accurately capture the
approach’s performance. Therefore, evaluating the
behavior of PIE in the context of their intended tasks
becomes crucial.
In this study, we examine the performance of an
existing PIE approach within the particular field of
object detection in underwater environments. To be
more precise, our evaluation focuses on the YOLOv5
object detector when used to detect fish in their nat-
ural habitat from images encoded using a specific
PIE algorithm: PHIE. The findings will demonstrate
PHIE’s effectiveness in progressively encoding im-
ages, not merely from a generic image quality metric
standpoint but from the viewpoint of a highly specific
and practical application.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
334

2 PROGRESSIVE IMAGE
ENCODING
The PIE algorithm used in this study is Progressive
Hierarchical Image Encoding (PHIE), which is exten-
sively described, discussed and evaluated with gen-
eral purpose metrics in (Burguera, 2023). Also, the
full PHIE source code, including encoder, decoder
and documentation is available at https://github.com/
aburguera/PHCENCODER. The purpose of this sec-
tion is to overview the algorithm.
PHIE performs recursive clustering of an input
image within the color space, generating a tree struc-
ture known as the PHIE tree. Each tree node under-
goes compression. The process of building the PHIE
tree and compressing each node is called encoding.
The tree can be transmitted node by node, allowing
the recipient to reconstruct the image progressively
upon receiving each node. The process of reconstruct-
ing an image from a PHIE tree, whether complete or
partial, is termed decoding.
Encoding begins by clusterizing the input image
in the color space, resulting in K clusters. Two clus-
terization methods are available in PHIE. The first
one, called the Linear Clustering (LC) linearly in-
terpolates K colors, based on their luminance, from
the darkest one to the lightest one in the input image.
The resulting ordered list of K colors is the so called
Color Palette (CP). Then, LC assigns each pixel in
the input image to one of the K clusters depending on
the pixel color proximity to the corresponding color
in CP computed using Euclidean distance in the RGB
space. As a result, each pixel is assigned an index to
CP, building the so-called Cluter Indices (CI).
The second clusterization method, called K-
Means Clustering (KC) uses the well known algo-
rithm K-Means to clusterize the image in the RGB
space. K-Means provides a vector stating the class of
each pixel and the corresponding class centroids. It is
easy to see that these outputs correspond to CI and CP
respectively. Having LC and KC the same input and
output formats, they can be used interchangeably.
Encoding is performed recursively by applying
the same clusterization algorithm to each of the ob-
tained clusters. Recursion ends when the number of
different colors in the input list of pixels is equal or
below K. In this way, the PHIE tree is built where
the root node clusterizes the input image and each re-
maining node clusterizes one cluster of its parent.
Two additional encoding aspects are the follow-
ing. First, after encoding each node the reconstruc-
tion error is computed. This error is computed as the
sum of the squared differences between the input im-
age and the result of reconstructing the image using
Figure 1: An example of PHIE using K=2. Each node (gray
rounded boxes) shows the ON (left), the CI (middle) and
CP (right). Dashed squares within CI denote pixels that are
not considered in that node. The images pointed by the yel-
low arrows are the partial decoding using that node and the
preceeding.
(a) (b) (c)
Figure 2: (a) Input image and the results of decoding (b)
1 node and (c) 5 nodes of the PHIE encoded image using
K=8.
that node and all of its ancestors. This error makes
it possible to sort the nodes within each tree level
depending on the amount of image information they
contain. The Order Number (ON) is computed using
this criteria and defines the specific sequence in which
the nodes have to be transmitted to guarantee that the
most part of the image information is transmitted at
the beginning.
Second, each node can be compressed. PHIE
proposes four different strategies (no compression
at all, Snappy compression, GZIP compression and
LZMA-XZ compression) ranging from faster and
larger nodes to slower and smaller nodes.
As for decoding, the entire tree can be recursively
decoded as follows. If a node is a leaf, its pixel col-
ors are picked from its own CP. Otherwise, its colors
come from decoding its child nodes. Through recur-
sion, the information will propagate from leafs up to
the root, resulting in an exact copy of the original im-
age.
Figure 1 summarizes these ideas by showing a
simple 3×3 image with 6 different colors and using
K=2. The last image, obtained from the node with an
ON of 4, is a perfect, lossless, replica of the original
one.
Combining Progressive Hierarchical Image Encoding and YOLO to Detect Fish in Their Natural Habitat
335
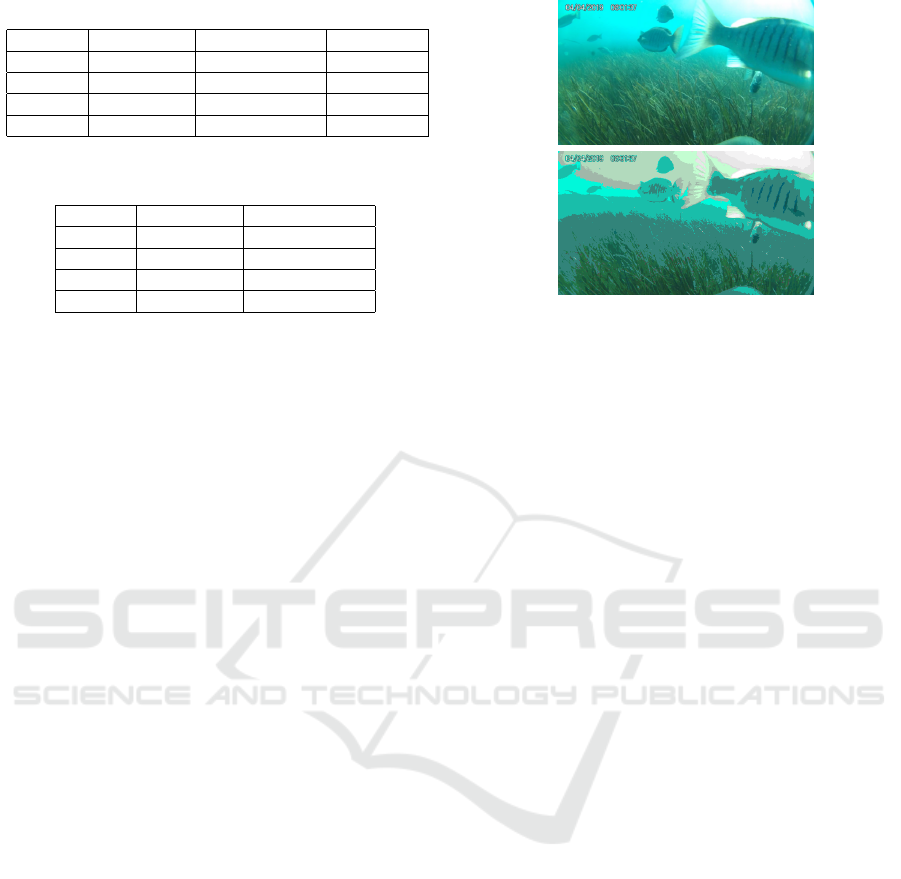
Table 1: Overview of the Luderick-Seagrass dataset.
SET # IMAGES # LUDERICK # BREAM
TRAIN 2673 6649 53
TEST 843 1632 29
VAL. 764 1023 43
TOTAL 4280 9304 125
Table 2: Overview of the processed Luderick-Seagrass
dataset.
SET # IMAGES # LUDERICK
TRAIN 2625 6416
TEST 814 1611
VAL. 721 925
TOTAL 4160 8952
As an example, we encoded the image shown in
Figure 2-a, which is part of the dataset used in the ex-
periments, using K=8 and LZMA-XZ compression.
The resulting PHIE tree has 10772 nodes. Figures 2-
b and 2-c show the result of decoding the tree using
one and five, respectively, of the 10772 nodes. As it
can be observed, only one node leads to an accept-
able quality, though still far from the original image,
whilst five nodes produce an image very similar to the
original one. The required size to store the first five
nodes responsible for Figure 2-c is only a 31% and
a 11% of the PNG and raw versions, respectively, of
the input image. Thus, visually good images can be
obtained with a small fraction of the PHIE tree (5 of
10772 nodes) and small data size.
3 EXPERIMENTAL RESULTS
3.1 The Data
Our proposal will be evaluated using the Luderick-
Seagrass dataset (Ditria et al., 2021), which comprises
annotated footage of Girella tricuspidata in two estu-
ary systems in southeast Queensland, Australia. The
dataset contains video sequences and color images
with a resolution of 1920x1080 where two fish species
(luderick and bream) are annotated. Table 1 summa-
rizes the dataset contents.
As it can be observed, the dataset is extremely un-
balanced towards the Luderick class, with very few
instances of bream. For this reason, we removed all
the images that contained breams to have a single
class dataset. Also, we resized all the images to have
a width of 640 pixels to facilitate its use in YOLOv5.
Table 2 summarizes the resulting dataset, which is the
one used in the experiments. For the sake of clarity,
let this dataset be called the raw dataset.
Figure 3: Example of a dataset image (top) and the encoded
version (bottom).
3.2 Experimental Setup
Our goal being to experimentally evaluate the
YOLOv5 performance in detecting fish from PHIE
encoded images, we started by encoding the raw
dataset. To this end, we used K = 4, K-Means clus-
tering (KC) and Snappy compression, which lead to
good results with general purpose image quality met-
rics. Each image in the dataset was encoded up to
a size which is, approximately, the 30% of the corre-
sponding PNG encoded size in the raw dataset. In this
way, we will evaluate how good are the object detec-
tion results when only a fraction of the size needed
to encode the image in PNG is used. It is important
to emphasize that, given that PHIE nodes are atomic
(they have either to be fully transmitted or not trans-
mitted at all) it is not possible to guarantee an exact
30% of the size. More specifically, the PHIE encod-
ing we have used requires, in average, a 30.2% of the
size of PNG corresponding image with a standard de-
viation of 1.3%. Let the result of encoding each raw
dataset image using PHIE as described be referred to
as the encoded dataset. Figure 3 shows an example of
one raw dataset image together with its counterpart in
the encoded dataset.
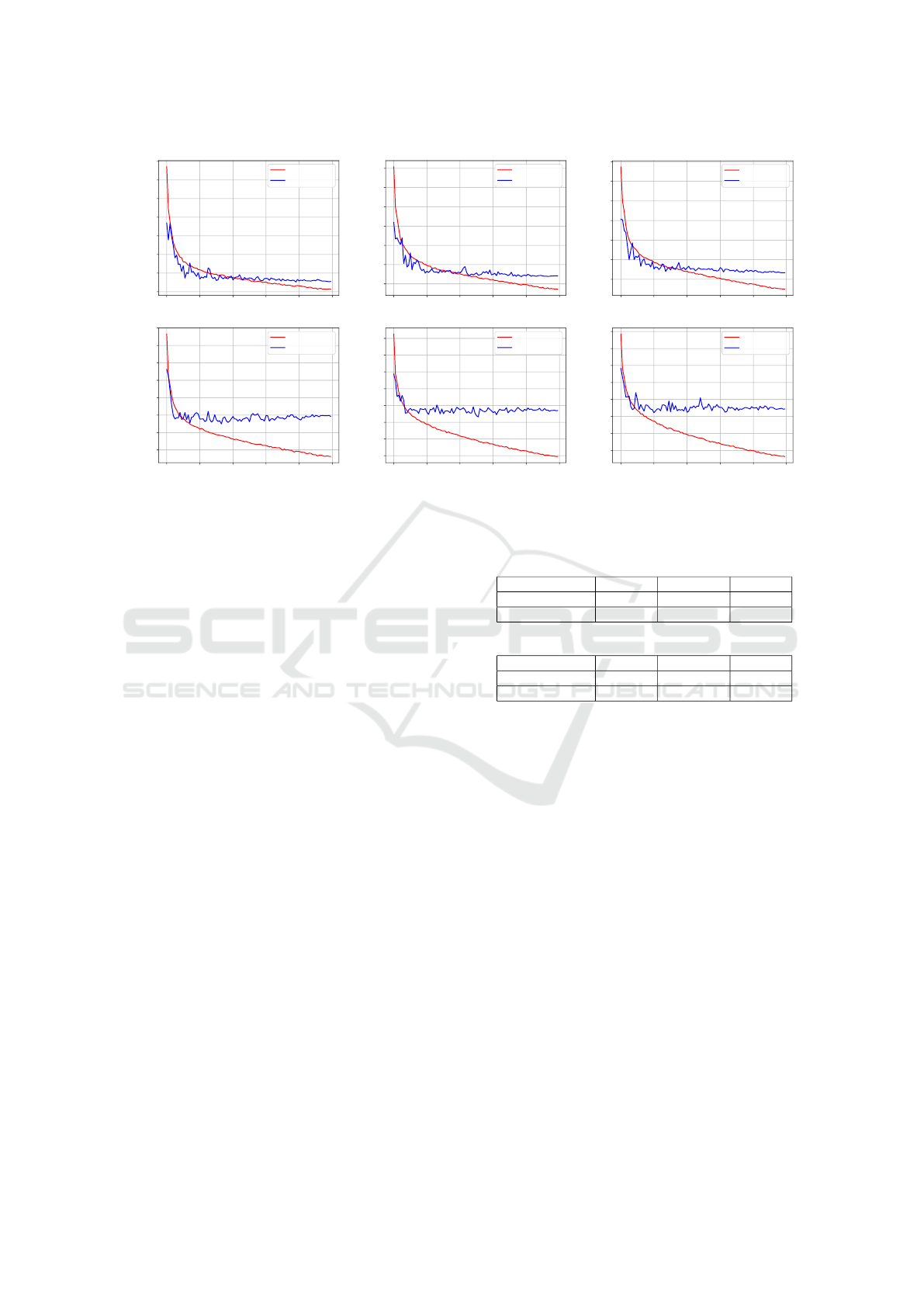
After that, we trained three different YOLOv5
model sizes (small or YOLOv5s, medium or
YOLOv5m and large or YOLOv5l) using the train
data both from the raw dataset and from the encoded
dataset, resulting in six different configurations. Fig-
ure 4 shows the evolution of the YOLOv5 box loss
functions with the training epochs with each of the
tested configurations. It can be observed how the evo-
lution is similar among model sizes. Also, it can be
observed how the models trained with the encoded
dataset start to overfit earlier (≃ 10 epochs) than those
trained with the raw one (≃ 30 epochs). Since it is
advisable to stop training as soon as overfitting ap-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
336
0 20 40 60 80 100
EPOCH
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
BOX LOSS
INPUT DATASET, YOLOv5s
TRAINING
VALIDATION
0 20 40 60 80 100
EPOCH
0.02
0.03
0.04
0.05
0.06
0.07
0.08
BOX LOSS
INPUT DATASET, YOLOv5m
TRAINING
VALIDATION
0 20 40 60 80 100
EPOCH
0.02
0.03
0.04
0.05
0.06
0.07
0.08
BOX LOSS
INPUT DATASET, YOLOv5l
TRAINING
VALIDATION
0 20 40 60 80 100
EPOCH
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
BOX LOSS
ENCODED DATASET, YOLOv5s
TRAINING
VALIDATION
0 20 40 60 80 100
EPOCH
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
BOX LOSS
ENCODED DATASET, YOLOv5m
TRAINING
VALIDATION
0 20 40 60 80 100
EPOCH
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
BOX LOSS
ENCODED DATASET, YOLOv5l
TRAINING
VALIDATION
Figure 4: Evolution of the box loss with the training epochs when using the raw dataset (top row) and the encoded dataset
(bottom row) when training the small YOLO model (left column), the medium YOLO model (mid column) and the large one
(right column).
pears, this shows that using the encoded dataset leads
to shorter training times and, also, that probably train-
ing in this case would benefit from a larger dataset.
There are two important parameters when evalu-
ating an object detector. On the one hand, the con-
fidence threshold. This threshold is used to decide
whether a detected object is considered or discarded
depending on the specific confidence score computed
by, in this case, YOLO. On the other hand, the Inter-
section over Union (IoU) threshold. The IoU mea-
sures the overlap between the detected object bound-
ing box and a ground truth bounding box as the area
of the intersection between both boxes divided by
the area of their union. The IoU threshold defines
the minimum IoU to consider that a detection and a
ground truth belong to the same object. In this way,
the IoU threshold is crucial to determine the number
of correct and incorrect object detections and compute
metrics such as Precision (P) or Recall (R).
Using one IoU threshold and several confidence
thresholds, one can measure the corresponding P and
R. In this way, different Precision-Recall Curves can
be built, one for each tested IoU threshold. The area
below a Precision-Recall Curve constitutes, in single-
class object detection, the mean Average Precision
(mAP).
We will compute the mAP@0.5, which is the
mAP corresponding to an IoU threshold of 0.5; and
the mAP@0.5:0.95, which is the average of the mAP
using an IoU threshold of 0.5 up to the mAP using an
IoU threhold of 0.95 in intervals of 0.05. Both metrics
are widely used to evaluate object detectors.
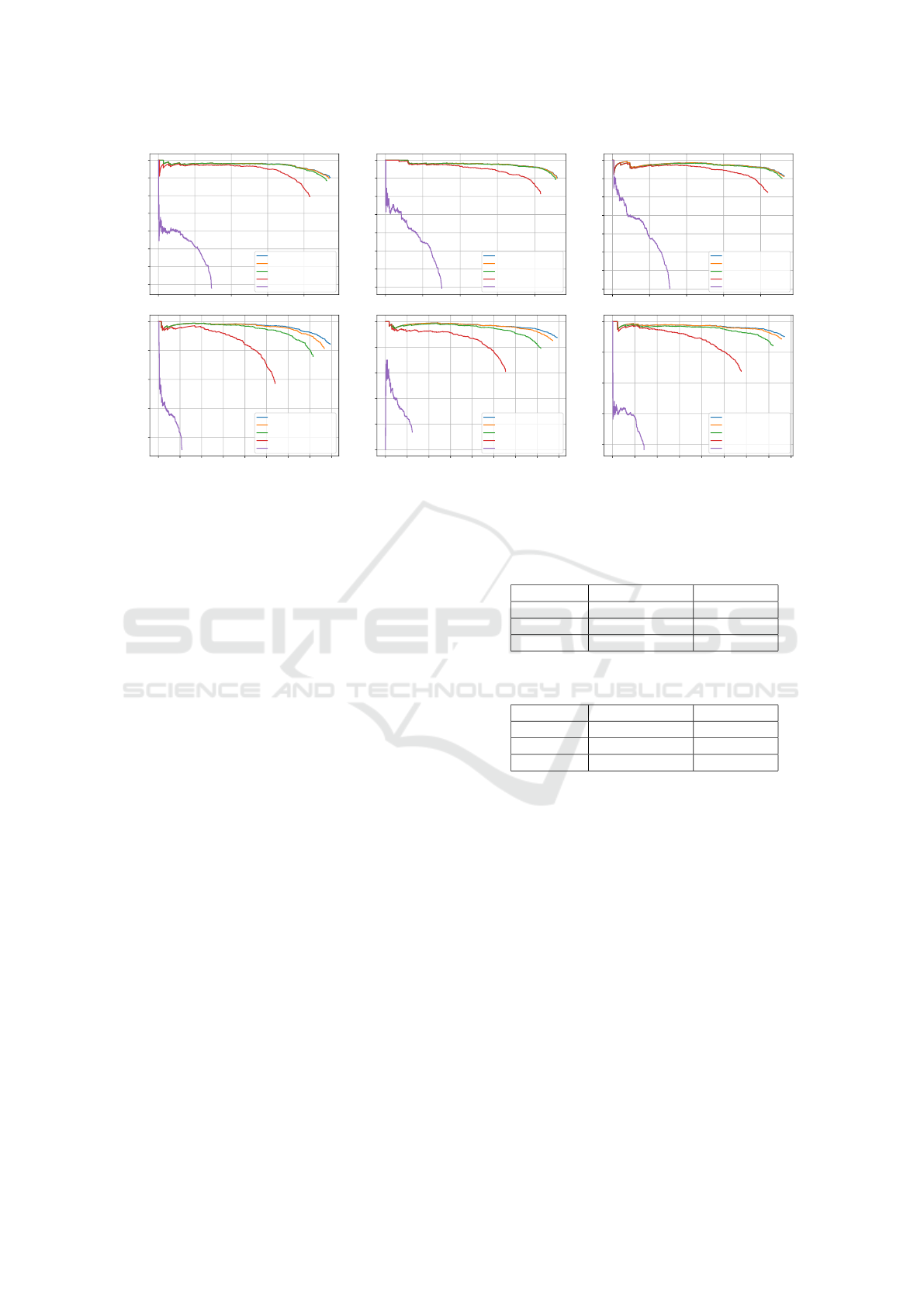
Table 3: Object detection results using the raw dataset.
SMALL MEDIUM LARGE
mAP@0.5 0.931 0.928 0.926
mAP@0.5:0.95 0.752 0.765 0.768
Table 4: Object detection results using the encoded dataset.
SMALL MEDIUM LARGE
mAP@0.5 0.787 0.792 0.803
mAP@0.5:0.95 0.548 0.548 0.571
3.3 Results
After training the six mentioned models (YOLOv5s,
YOLOv5m and YOLOv5l with the raw dataset and
with the encoded dataset), we performed inference us-
ing the test sets. Figure 5 shows the Precision-recall
curves obtained for all the six models using different
IoU thresholds. The area below each of these curves
is the corresponding mAP. It can be observed that re-
ducing the IoU threshold barely influences the results
with the raw dataset but significant differences arise
between IoU thresholds with the encoded dataset.
Given that only small differences should appear in the
Precision-recall curves for reasonable IoU thresholds,
as it happens with the raw dataset, this reinforces the
idea that a larger trainig set would improve the results
with the encoded dataset, consistently with the results
in Figure 4.
Table 3 shows the mAP@0.5 and mAP@0.5:0.95
when using the raw dataset and Table 4 shows the
same metrics when the encoded dataset is used. Re-
sults using the raw dataset show very large mAP@0.5
Combining Progressive Hierarchical Image Encoding and YOLO to Detect Fish in Their Natural Habitat
337
0.0 0.2 0.4 0.6 0.8
Recall
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Precision
IoU>=0.100, AP=0.943
IoU>=0.300, AP=0.939
IoU>=0.500, AP=0.931
IoU>=0.700, AP=0.857
IoU>=0.900, AP=0.257
0.0 0.2 0.4 0.6 0.8
Recall
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Precision
IoU>=0.100, AP=0.935
IoU>=0.300, AP=0.933
IoU>=0.500, AP=0.928
IoU>=0.700, AP=0.862
IoU>=0.900, AP=0.285
0.0 0.2 0.4 0.6 0.8
Recall
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Precision
IoU>=0.100, AP=0.935
IoU>=0.300, AP=0.933
IoU>=0.500, AP=0.926
IoU>=0.700, AP=0.863
IoU>=0.900, AP=0.305
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Recall
0.2
0.4
0.6
0.8
1.0
Precision
IoU>=0.100, AP=0.852
IoU>=0.300, AP=0.832
IoU>=0.500, AP=0.787
IoU>=0.700, AP=0.611
IoU>=0.900, AP=0.094
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
IoU>=0.100, AP=0.856
IoU>=0.300, AP=0.840
IoU>=0.500, AP=0.792
IoU>=0.700, AP=0.625
IoU>=0.900, AP=0.105
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Recall
0.2
0.4
0.6
0.8
1.0
Precision
IoU>=0.100, AP=0.848
IoU>=0.300, AP=0.838
IoU>=0.500, AP=0.803
IoU>=0.700, AP=0.662
IoU>=0.900, AP=0.125
Figure 5: Precision-recall curves using different IoU thresholds corresponding to YOLO trained with the raw dataset (top
row) and the encoded dataset (bottom row). The left column shows the results for YOLOv5s, the mid column corresponds to
YOLOv5m and the right column to YOLOv5l.
(greater than 0.9) and mAP@0.5:0.95 (greater than
0.7). They also show that, even though the
mAP@0.5:0.95 slightly increase with the model size,
the mAP@0.5 decreases. These changes being very
small, they are likely to be noise and, so, we can con-
clude that the model size barely influences the results
with the raw dataset.
As for the encoded dataset, the mAP@0.5 re-
sults are also good, though clearly below those ob-
tained with the raw dataset. Whereas the raw dataset
leads to mAP@0.5 larger than 0.9 in all cases, the
use of the encoded dataset reduces that metric to
values close to 0.8. A similar pattern is observed
with mAP@0.5:0.95, which exhibits values between
0.5 and 0.6 whereas the raw dataset provided values
larger than 0.7. Nevertheless, taking into account that
the image size used in the encoded dataset is less than
one third of that of the raw dataset, the small loss in
mAP is more than acceptable.
Another difference between the use of the raw and
the encoded dataset is the evolution of the results with
the model size. In the case of the encoded dataset,
the evolution is more clear, with all metrics increas-
ing with the model size. This suggests that object de-
tection with PHIE images could benefit from larger
models.
Even though the Precision-recall curves and mAP
provide a meaningful insight of the overall perfor-
mance, deploying a trained model requires one spe-
cific confidence threshold. To find it, we explored the
configuration space using confidence thresholds rang-
ing from 0.05 to 0.95 in intervals of 0.05. For each
Table 5: Optimal confidence thresholds with the raw
dataset.
THRESHOLD F1-SCORE
SMALL 0.3 0.906
MEDIUM 0.35 0.908
LARGE 0.45 0.929
Table 6: Optimal confidence thresholds with the encoded
dataset.
THRESHOLD F1-SCORE
SMALL 0.5 0.754
MEDIUM 0.45 0.757
LARGE 0.35 0.776
confidence threshold, we computed the F1-Score met-
ric using an IoU threshold of 0.5. The F1-Score is a
suitable metric for object detection as it balances pre-
cision and recall, effectively capturing both the abil-
ity to accurately identify objects and minimize false
positives. Then, we selected the confidence threshold
maximizing the F1-Score.
Tables 5 and 6 show the confidence thresholds
maximizing the F1-Score as well as the maximum
F1-Scores for the raw and the encoded datasets re-
spectively. As it can be observed, in both cases,
the larger the model the better the optimal F1-Score.
However, the optimal confidence threshold increases
with the model size when the raw dataset is used
whilst it decreases when using the encoded one. Since
longer training will consolidate the confidence thresh-
old around that using to compute the loss function
during training (0.5), this is consistent with previous
results, suggesting that there is still room to train the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
338
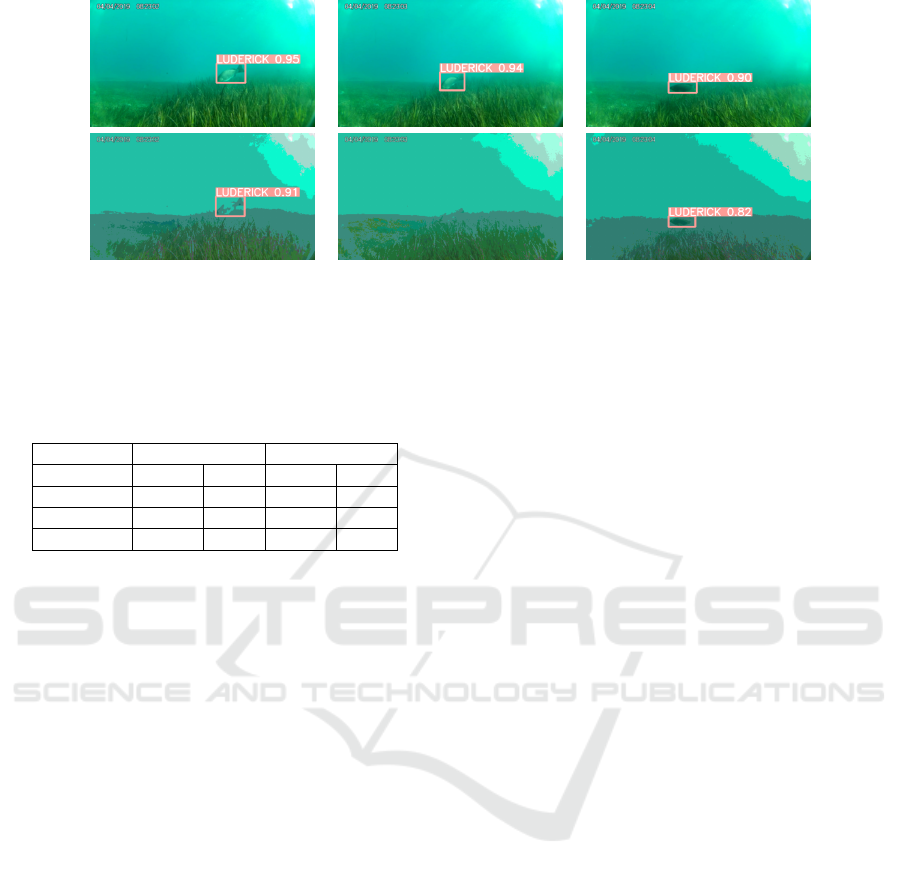
Figure 6: An instance of failure with the encoded dataset. Top row: detections on the raw dataset. Bottom row: corresponding
detections on the encoded dataset. The text near the bounding box states the class (luderick) and the confidence score assigned
by YOLO.
Table 7: Mean (µ) and standard deviation (σ) of the in-
ference times per image expressed in ms for all the tested
model sizes and datasets.
RAW ENCODED
µ σ µ σ
SMALL 9.505 0.693 8.601 0.789
MEDIUM 18.938 0.628 19.353 0.620
LARGE 39.307 0.467 40.127 0.581
model with larger encoded datasets.
By carefully checking the detection on the en-
coded images sorted by the video frame from which
they come from, we have observed that the instances
of failure tend to be spurious errors (positives or neg-
atives), spending one or two frames. Figure 6 exem-
plifies this idea. In this example, the fish is detected in
all frames with the raw dataset, but the mid frame is
lost in the encoded dataset. This is a key feature since
these failures can be easily corrected by considering
the temporal continuity of the input video sequence
by, for example, performing fish tracking.
Finally, we measured the detection times in each
of the images for all the tested datasets and model
sizes. The times have been measured on a standard
laptop (i7 CPU at 2.60GHz with 16 GB RAM running
Ubuntu 20.04) endowed with a NVIDIA GeForce
GTX 1650 with 4 GB and executing YOLOv5 on
Python-3.8.10 with torch-1.11.0 and CUDA 11.3.
The mean and the standard deviation of the detec-
tion times are reported in Table 7. As it can be ob-
served, each model approximately duplicates the in-
ference time of the immediately smaller one. Also,
there are no significant differences between the raw
and the encoded dataset, both of them being suitable
for video-rate processing in most cases.
4 CONCLUSION
In this paper we have experimentally evaluated the
performance of YOLOv5 to detect fish in underwa-
ter images when partially decoded PHIE images are
used. This makes it possible to evaluate the feasibil-
ity of using PHIE for underwater image transmission
when the intended task is to perform fish detection.
The experimental setup considered both the orig-
inal images (raw dataset) and the partially decoded
ones up to a 30% of the original image size in PNG
format (encoded dataset). In other words, the partial
decoding will use only a 30% of the bandwidth re-
quired by the corresponding PNG image, making it
possible for an AUV to transmit the images fastly to
a, for example, base station in charge of performing
fish detection.
As for fish detection, we used YOLOv5 and
tested three different model sizes: the small one
(YOLOv5s), the medium one (YOLOv5m) and the
large one (YOLOv5l).
Results show smaller performance when using the
encoded dataset. Whereas the mAP@0.5 surpasses
the 0.9 with the raw data, it barely reaches the 0.8
when using the encoded dataset. However, two as-
pects favour the use of PHIE. On the one hand, it is a
small performance reduction considering the substan-
tial gain in image size. On the other hand, an in-depth
analysis of the intances of failure shows that errors
are, in general, spurious, involving only one or two
frames of the original video sequence. This kind of
errors can be easily detected and, even, corrected by
considering the temporal sequence when, for exam-
ple, performing fish tracking or counting.
Overall, using PHIE seems to be a good option
when performing fish detection if the communication
bandwidth or reliability is more important than the
overall detection rate.
Combining Progressive Hierarchical Image Encoding and YOLO to Detect Fish in Their Natural Habitat
339

Future work involves studying the behavior of
YOLOv5 using different partial decodings, not only
using a 30% of the PNG size but exploring a larger
range. Also, even though YOLOv5 is mature and
widely spread, testing more recent YOLO versions
could provide additional insight into the advantages
of performing fish detection using partially decoded
data.
Finally, we would like to emphasize that we have
made all the source code used in this paper publicly
available. The PHIE is available at https://github.com/
aburguera/PHCENCODER. A YOLOv5 wrapper as
well as different tools to compute different metrics
and perform grid search on different parameters is
available at https://github.com/aburguera/ODUTILS.
ACKNOWLEDGEMENTS
This work is partially supported by
Grant PID2020-115332RB-C33 funded by
MCIN/AEI/10.13039/501100011033 by ”ERDF
A way of making Europe” and by Grant PLEC2021-
007525/AEI/10.13039/501100011033 funded by the
Agencia Estatal de Investigacion, under NextGenera-
tion EU/PRTR
REFERENCES
Anwar, S. and Li, C. (2020). Diving deeper into underwa-
ter image enhancement: A survey. Signal Processing:
Image Communication, 89:115978.
Bonin-Font, F. and Burguera, A. (2020). Towards multi-
robot visual graph-SLAM for autonomous marine ve-
hicles. Journal of Marine Science and Engineering,
8(6).
Burguera, A. (2023). Hierarchical color encoding for
progressive image transmission in underwater envi-
ronments. IEEE Robotics and Automation Letters,
8(5):2970–2975.
Burguera, A. and Bonin-Font, F. (2022). Progressive hierar-
chical encoding for image transmission in underwater
environments. In OCEANS 2022 - Hampton Roads,
pages 1–9.
Burguera, A., Bonin-Font, F., Lisani, J. L., Petro, A. B.,
and Oliver, G. (2016). Towards automatic visual sea
grass detection in underwater areas of ecological in-
terest. In 2016 IEEE 21st International Conference
on Emerging Technologies and Factory Automation
(ETFA), pages 1–4.
Ditria, E. M., Connolly, R. M., Jinks, E. L., and Lopez-
Marcano, S. (2021). Annotated video footage for au-
tomated identification and counting of fish in uncon-
strained seagrass habitats. Frontiers in Marine Sci-
ence, 8.
Do, H., Hong, S., and Kim, J. (2020). Robust Loop Closure
Method for Multi-Robot Map Fusion by Integration of
Consistency and Data Similarity. IEEE Robotics and
Automation Letters, 5(4):5701–5708.
Feng, W., Hu, C., Wang, Y., Zhang, J., and Yan, H. (2019).
A novel hierarchical coding progressive transmission
method for wmsn wildlife images. Sensors, 19(4).
Guo, J.-M. (2010). High efficiency ordered dither block
truncation coding with dither array lut and its scal-
able coding application. Digital Signal Processing,
20(1):97–110.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask R-CNN.
Jaafar, A. N., Ja’afar, H., Pasya, I., Abdullah, R., and Ya-
mada, Y. (2022). Overview of underwater commu-
nication technology. In Proceedings of the 12th Na-
tional Technical Seminar on Unmanned System Tech-
nology 2020, pages 93–104, Singapore. Springer Sin-
gapore.
K
¨
oser, K. and Frese, U. (2020). Challenges in Underwater
Visual Navigation and SLAM. In Intelligent Systems,
Control and Automation: Science and Engineering,
volume 96, pages 125–135.
Latif, Y., Cadena, C., and Neira, J. (2013). Robust loop
closing over time for pose graph SLAM. International
Journal of Robotics Research, 32(14):1611–1626.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2020). Focal loss for dense object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 42(2):318–327.
Monika, R., Samiappan, D., and Kumar, R. (2021). Under-
water image compression using energy based adaptive
block compressive sensing for IoUT applications. The
Visual Computer, (37):1499–1515.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
779–788, Los Alamitos, CA, USA. IEEE Computer
Society.
Rubino, E. M., Centelles, D., Sales, J., Marti, J. V., Marin,
R., Sanz, P. J., and Alvares, A. J. (2017). Progressive
image compression and transmission with region of
interest in underwater robotics. In OCEANS 2017 -
Aberdeen, pages 1–9.
Said, A. and Pearlman, W. (1996). A new, fast, and efficient
image codec based on set partitioning in hierarchical
trees. IEEE Transactions on Circuits and Systems for
Video Technology, 6(3):243–250.
Tan, M., Pang, R., and Le, Q. V. (2020). EfficientDet: Scal-
able and efficient object detection. In 2020 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 10778–10787.
Ultralytics. YOLOv5.
https://github.com/ultralytics/yolov5. Accessed:
2023-11-14.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proceed-
ings of the 2001 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition. CVPR
2001, volume 1, pages I–I.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
340
